OpenCV——总结《车牌识别》之《常用的函数介绍》
1.
cv2.getStructuringElement(cv2.MORPH_RECT, (10, 10))element = cv2.getStructuringElement(shape, ksize[, anchor])用于创建形态学操作的结构元素(structuring element)。
参数解释:
shape:结构元素的形状,可以是以下值之一:
cv2.MORPH_RECT:矩形结构元素。
cv2.MORPH_CROSS:十字形结构元素。
cv2.MORPH_ELLIPSE:椭圆形结构元素。
ksize:结构元素的尺寸,表示结构元素的宽度和高度。可以是一个整数,表示正方形结构元素的边长;或者是一个元组 (width, height),表示矩形结构元素的宽度和高度。
anchor:可选参数,表示结构元素的锚点位置,默认为 (-1, -1),表示将锚点设置在结构元素的中心位置。
返回值:
element:创建的结构元素,可以用于形态学操作(如膨胀、腐蚀、开运算、闭运算等)。
2.
cv2.morphologyEx(img_edge, cv2.MORPH_CLOSE, kernel)#进行闭运算,sd。首先进行膨胀后进行腐蚀操作,去除白色中的黑色点。dst = cv2.morphologyEx(src, op, kernel[, dst[, anchor[, iterations[, borderType[, borderValue]]]]])形态学操作函数之一,用于对图像进行形态学运算。
参数解释:
src:输入图像,可以是单通道(灰度图)或多通道(彩色图)。
op:形态学操作类型,可以是以下值之一:
cv2.MORPH_ERODE:腐蚀操作。
cv2.MORPH_DILATE:膨胀操作。
cv2.MORPH_OPEN:开运算(先腐蚀后膨胀)。
cv2.MORPH_CLOSE:闭运算(先膨胀后腐蚀)。
cv2.MORPH_GRADIENT:形态学梯度(膨胀图像与腐蚀图像的差异)。
cv2.MORPH_TOPHAT:顶帽运算(原始图像与开运算结果的差异)。
cv2.MORPH_BLACKHAT:黑帽运算(闭运算结果与原始图像的差异)。
kernel:结构元素(kernel)用于指定形态学操作的范围和形状。
dst:可选参数,输出图像,与输入图像具有相同的大小和通道数。
anchor:可选参数,锚点位置,默认为 (-1, -1),表示将锚点设置在结构元素的中心位置。
iterations:可选参数,指定形态学操作的迭代次数,默认为 1。
borderType:可选参数,边界扩充类型,默认为 cv2.BORDER_CONSTANT。
borderValue:可选参数,边界填充值,默认为 0。
返回值:
dst:形态学操作的结果图像。
3.
cv2.threshold(img_opening, 0, 255, cv2.THRESH_BINARY)#可以理解为简单滤波ret, thresh = cv2.threshold(src, thresh, maxval, type[, dst])用于将图像进行二值化处理。
参数解释:
src:输入的图像,通常为灰度图像(单通道图像)。
thresh:阈值,用于将图像的像素值与该阈值进行比较。
maxval:当像素值大于阈值时,设置的像素值。
type:二值化类型,指定了如何将像素值与阈值进行比较和赋值。常用的类型有:
cv2.THRESH_BINARY:大于阈值的像素值设置为 maxval,小于等于阈值的像素值设置为 0。
cv2.THRESH_BINARY_INV:大于阈值的像素值设置为 0,小于等于阈值的像素值设置为 maxval。
cv2.THRESH_TRUNC:大于阈值的像素值设置为阈值,小于等于阈值的像素值保持不变。
cv2.THRESH_TOZERO:大于阈值的像素值保持不变,小于等于阈值的像素值设置为 0。
cv2.THRESH_TOZERO_INV:大于阈值的像素值设置为 0,小于等于阈值的像素值保持不变。
dst:可选参数,输出的二值化图像,与输入图像 src 的大小和类型相同。
返回值:
ret:计算得到的阈值。
thresh:二值化后的图像。
例子代码
import cv2# 读取灰度图像
image = cv2.imread('image.jpg', 0)# 进行二值化处理
ret, thresh = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)# 显示原图和二值化图像
cv2.imshow('Original Image', image)
cv2.imshow('Thresholded Image', thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()4.
# 查找图像边缘整体形成的矩形区域,可能有很多,车牌就在其中一个矩形区域中
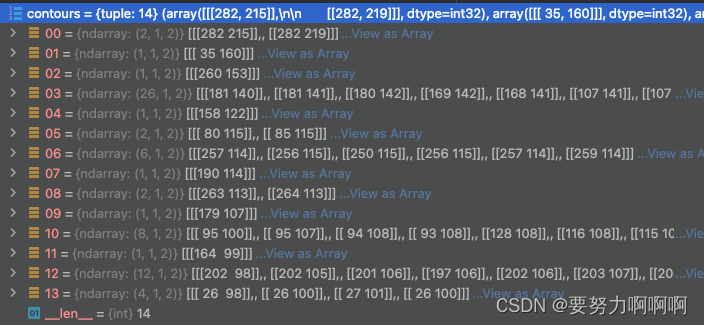
contours, hierarchy = cv2.findContours(img_edge2, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)contours, hierarchy = cv2.findContours(image, mode, method[, contours[, hierarchy[, offset]]])参数解释:
image:输入图像,通常为二值图像(黑白图像)。
mode:轮廓检索模式,定义了轮廓的层次结构。常见的取值有:
cv2.RETR_EXTERNAL:仅检测外部轮廓。
cv2.RETR_LIST:检测所有轮廓,不建立层次关系。
cv2.RETR_CCOMP:检测所有轮廓,建立两层层次关系。
cv2.RETR_TREE:检测所有轮廓,建立完整的层次结构。
method:轮廓近似方法,用于压缩轮廓。常见的取值有:
cv2.CHAIN_APPROX_NONE:存储所有的轮廓点。
cv2.CHAIN_APPROX_SIMPLE:仅存储轮廓的端点。
cv2.CHAIN_APPROX_TC89_L1:使用 Teh-Chin 链逼近算法。
cv2.CHAIN_APPROX_TC89_KCOS:使用 Teh-Chin 链逼近算法。
contours:可选参数,检测到的轮廓列表。
hierarchy:可选参数,轮廓层次结构。
返回值:
contours:检测到的轮廓列表。
hierarchy:轮廓的层次结构,每个轮廓对应四个整数 [Next, Previous, First_Child, Parent]。
这个是contours返回的值的内容。
5.
for c in contours:x, y, w, h = cv2.boundingRect(c)#这个函数就是用来返回值使用的。x, y, w, h = cv2.boundingRect(contour)函数用于计算轮廓的边界矩形,即给出包围轮廓的最小矩形框。
参数解释:
contour:输入的轮廓。
返回值:
x:边界矩形左上角点的 x 坐标。
y:边界矩形左上角点的 y 坐标。
w:边界矩形的宽度。
h:边界矩形的高度。
使用 cv2.boundingRect() 函数可以获取轮廓的边界矩形信息,包括左上角点的坐标 (x, y) 以及矩形的宽度 w 和高度 h。这些信息可以用于进一步分析和处理轮廓,例如在图像中绘制边界矩形或提取矩形区域内的图像内容。在这里能够找到车牌的信息。
6.
rect = cv2.minAreaRect(c)retval, box = cv2.minAreaRect(points)用于计算给定点集的最小外接矩形。最小外接矩形是能够完全包围点集并且具有最小面积的矩形。
参数解释:
points:要计算最小外接矩形的输入点集,可以是一个 Numpy 数组或者一个包含点的 Python 列表。
retval:返回值,表示最小外接矩形的相关信息。通常不会使用到该返回值。
box:最小外接矩形的信息,返回一个 ((center_x, center_y), (width, height), angle) 的元组,其中:
(center_x, center_y):最小外接矩形的中心点坐标。
(width, height):最小外接矩形的宽度和高度。
angle:最小外接矩形相对于水平方向的旋转角度。
例子
import cv2
import numpy as np# 定义一个点集
points = np.array([[100, 50], [200, 100], [150, 200], [50, 150]], dtype=np.int32)# 计算最小外接矩形
retval, box = cv2.minAreaRect(points)# 提取最小外接矩形的信息
center, size, angle = box
width, height = size# 在图像上绘制最小外接矩形
rect_points = cv2.boxPoints(box).astype(np.int32)
cv2.drawContours(image, [rect_points], 0, (0, 255, 0), 2)# 显示图像
cv2.imshow("Image", image)
cv2.waitKey(0)
cv2.destroyAllWindows()7.
area = cv2.contourArea(contour)用于计算给定轮廓的面积。轮廓是由一系列连续的点组成的闭合曲线。
参数解释:
contour:要计算面积的轮廓,可以是一个包含点的 Numpy 数组。
返回值:
area:轮廓的面积,以像素为单位。
代码
import cv2
import numpy as np# 读取图像并进行灰度化和二值化处理
image = cv2.imread("image.jpg")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
_, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)# 寻找轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 计算轮廓的面积
for contour in contours:area = cv2.contourArea(contour)print("Contour Area:", area)# 绘制轮廓
cv2.drawContours(image, contours, -1, (0, 255, 0), 2)# 显示图像
cv2.imshow("Image", image)
cv2.waitKey(0)
cv2.destroyAllWindows()9.
points = cv2.boxPoints(box)参数解释:
box:输入的旋转矩形,可以通过 cv2.minAreaRect() 函数计算得到。
返回值:
points:旋转矩形的四个角点坐标,返回的是一个包含四个坐标点的 Numpy 数组。
示例用法:
import cv2# 创建一个旋转矩形
center = (100, 100)
size = (200, 100)
angle = 30
rect = (center, size, angle)# 计算旋转矩形的四个角点坐标
points = cv2.boxPoints(rect)
print("Points:", points)# 将浮点型坐标点转换为整数型
points = np.int0(points)# 绘制旋转矩形
image = np.zeros((200, 200), dtype=np.uint8)
cv2.drawContours(image, [points], 0, 255, 2)# 显示图像
cv2.imshow("Image", image)
cv2.waitKey(0)
cv2.destroyAllWindows()cv2.boxPoints() 函数的输入参数是一个旋转矩形,该旋转矩形可以通过 cv2.minAreaRect() 函数计算得到。cv2.boxPoints() 函数返回的角点坐标是按照顺时针方向排列的。
10.
cv2.drawContours() 和 cv2.rectangle() 是 OpenCV 中用于绘制轮廓和矩形的函数,它们之间有以下区别:
绘制对象:
cv2.drawContours(image, contours, contourIdx, color, thickness) 用于绘制轮廓,其中 image 是要在其上绘制轮廓的图像,contours 是轮廓的列表或数组,contourIdx 是要绘制的轮廓索引(-1 表示绘制所有轮廓),color 是轮廓的颜色,thickness 是轮廓的线宽度。
cv2.rectangle(image, pt1, pt2, color, thickness) 用于绘制矩形,其中 image 是要在其上绘制矩形的图像,pt1 是矩形的左上角坐标,pt2 是矩形的右下角坐标,color 是矩形的颜色,thickness 是矩形的边框线宽度。
使用场景:
cv2.drawContours() 适用于绘制复杂的轮廓,可以绘制闭合的和非闭合的轮廓,可以选择绘制单个轮廓或多个轮廓,常用于轮廓检测和分析。
cv2.rectangle() 适用于绘制简单的矩形,绘制的矩形是一个闭合的四边形,常用于标记和定位目标区域。
总结:cv2.drawContours() 用于绘制轮廓,而 cv2.rectangle() 用于绘制矩形。它们的主要区别在于绘制的对象不同,cv2.drawContours() 可以绘制任意形状的轮廓,而 cv2.rectangle() 绘制的是矩形。
相关文章:
OpenCV——总结《车牌识别》之《常用的函数介绍》
1. cv2.getStructuringElement(cv2.MORPH_RECT, (10, 10))element cv2.getStructuringElement(shape, ksize[, anchor])用于创建形态学操作的结构元素(structuring element)。 参数解释: shape:结构元素的形状,可以…...

chatgpt赋能python:如何利用Python进行自动化办公
如何利用Python进行自动化办公 在现代办公环境中,自动化成为了一种趋势。利用计算机程序自动处理重复性劳动,可以提高生产效率和工作质量,同时也能够让工作更加轻松。Python作为一种常用的编程语言,在自动化办公中发挥了重要作用…...
linux-2.6.22.6内核网卡驱动框架分析
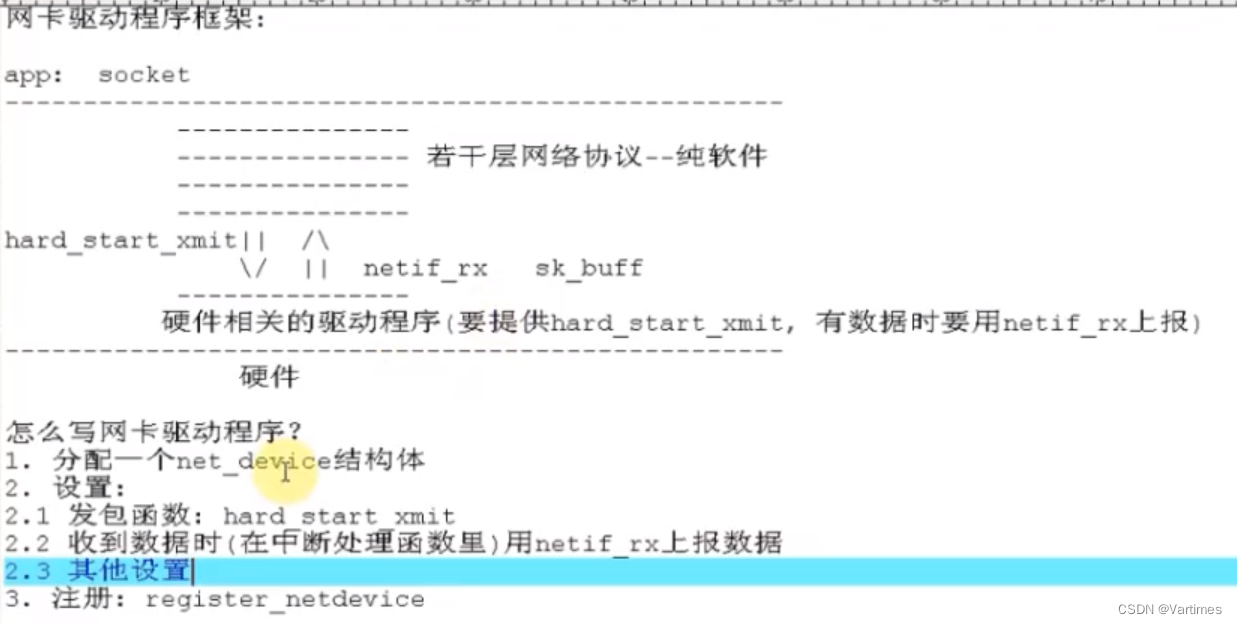
网络协议分为很多层,而驱动这层对应于实际的物理网卡部分,这也是最底层的部分,以cs89x0.c这个驱动程序为例来分析下网卡驱动程序框架。 正常开发一个驱动程序时,一般都遵循以下几个步骤: 1.分配某个结构体 2.设置该结…...
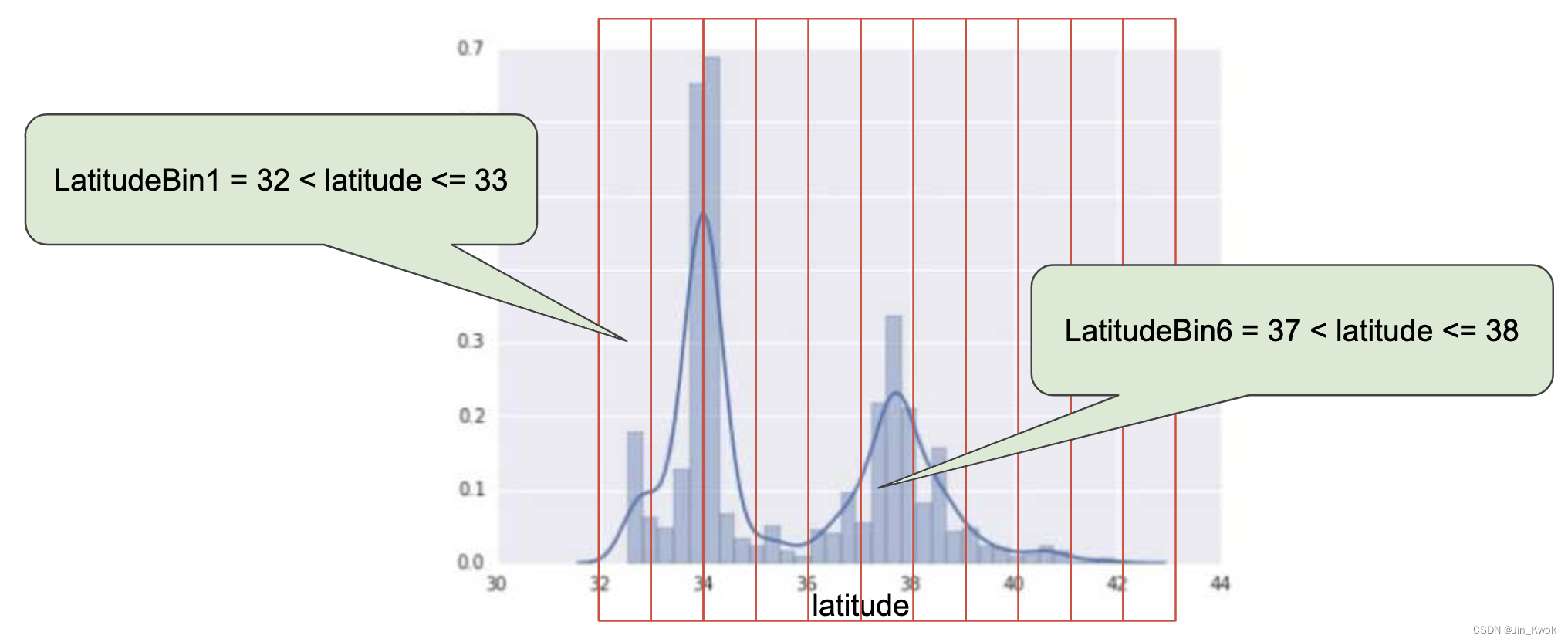
机器学习7:特征工程
在传统的软件工程中,核心是代码,然而,在机器学习项目中,重点则是特征——也就是说,开发人员优化模型的方法之一是增加和改进其输入特征。很多时候,优化特征比优化模型带来的增益要大得多。 笔者曾经参与过一…...

coverage代码覆盖率测试介绍
coverage代码覆盖率测试介绍 背景知识补充 1、什么是覆盖率 测试过程中提到的覆盖率,指的是已测试的内容,占待测内容的百分比,在一定程度上反应测试的完整程度。 覆盖率有可以根据要衡量的对象细分很多种,比如接口覆盖率、分支…...
使用 Debian、Docker 和 Nginx 部署 Web 应用
前言 本文将介绍基于 Debian 的系统上使用 Docker 和 Nginx 进行 Web 应用部署的过程。着重介绍了 Debian、Docker 和 Nginx 的安装和配置。 第 1 步:更新和升级 Debian 系统 通过 SSH 连接到服务器。更新软件包列表:sudo apt update升级已安装的软件…...
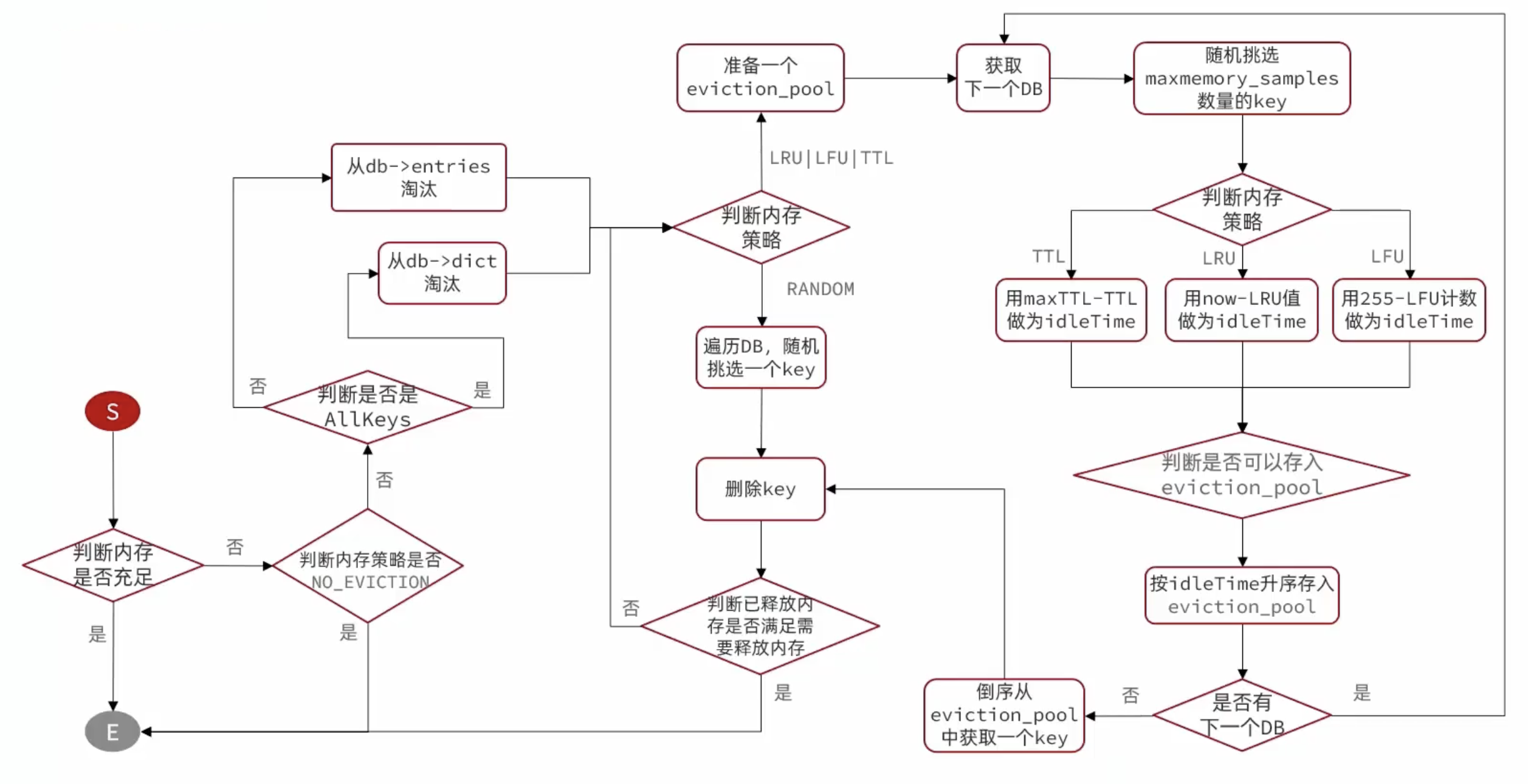
Redis原理 - 内存策略
原文首更地址,阅读效果更佳! Redis原理 - 内存策略 | CoderMast编程桅杆https://www.codermast.com/database/redis/redis-memery-strategy.html Redis 本身是一个典型的 key-value 内存存储数据库,因此所有的 key、value 都保存在之前学习…...
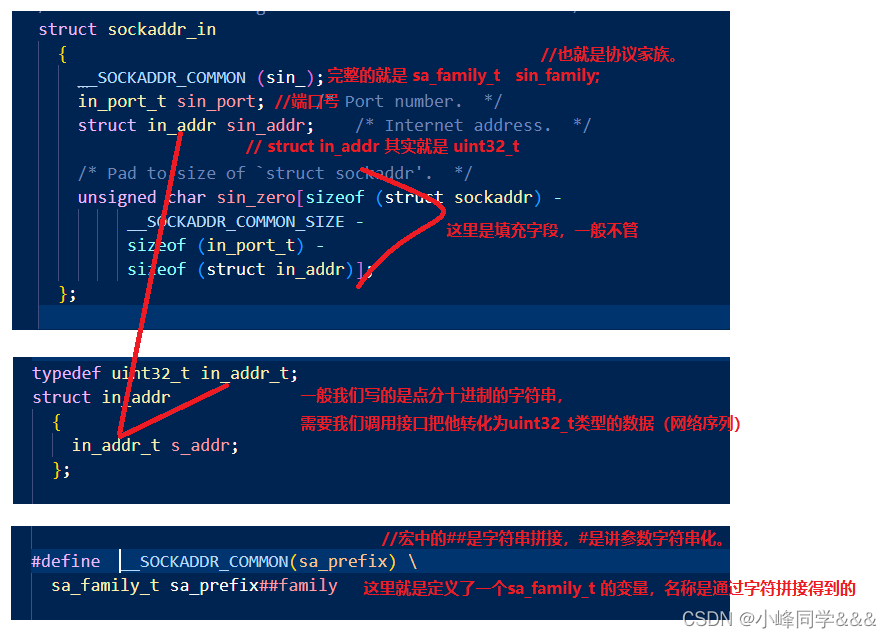
【计算机网络】IP 地址处理函数
目录 1.struct sockaddr_in的结构 2.一般我们写的结构 3.常见的“点分十进制” 到 ” uint32_t 的转化接口 3.1. inet_aton 和 inet_ntoa (ipv4) 3.2. inet_pton 和 inet_ntop (ipv4 和 ipv6) 3.3. inet_addr 和 inet_network 3…...
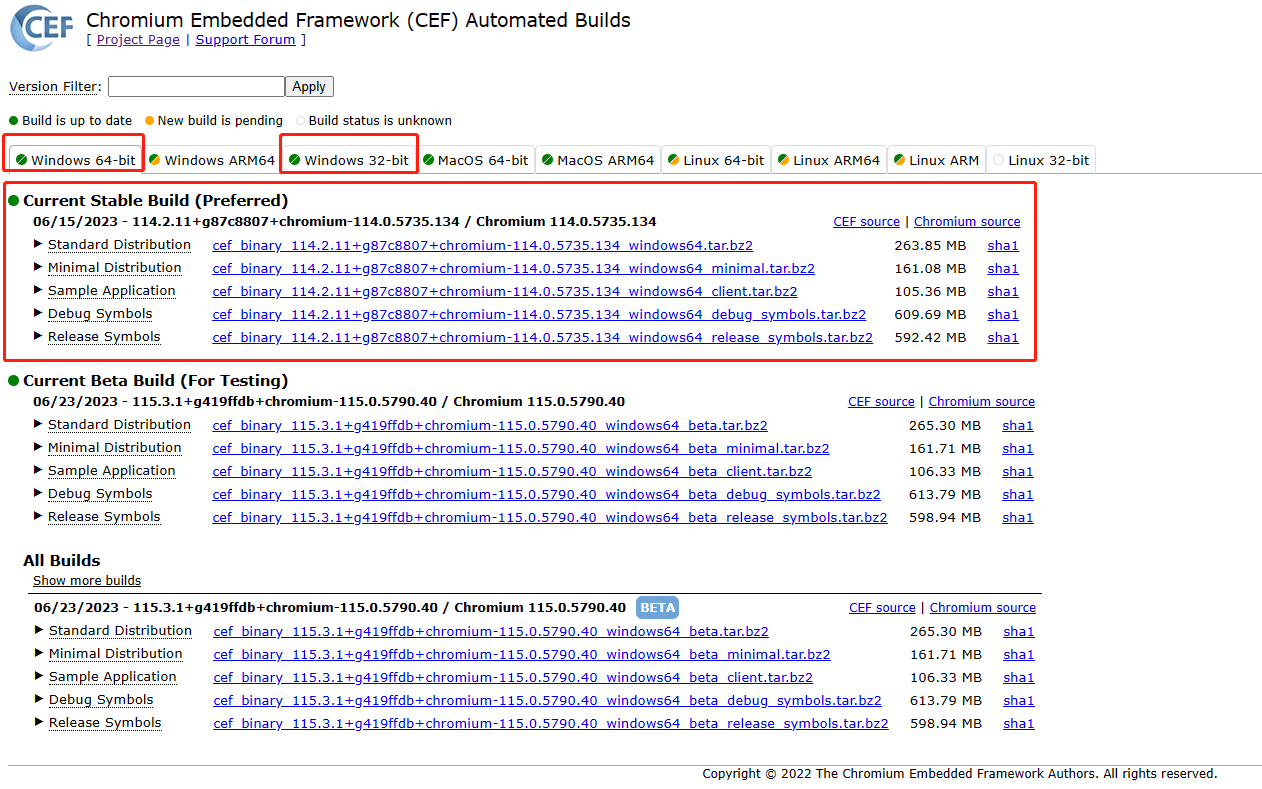
9i物联网浏览器(cef_114.2.110114.2.100支持H264视频)WinForm-CefSharp114(5735)视频版本体验
更新:2023.6.25 版本:Cef_114.2.110和114.2.100+chromium-114.0.5735.134的32位和64位 说明:支持图片,mp3,mp4(H264)多媒体 测试环境:windows server 2019 测试网址:www.html5test.com 1.包下载地址 1.1 https://www.nuget.org/packages/CefSharp.Common/ 1.2 https…...

如何在本地运行一个已关服但具有客户端的游戏
虽然游戏服务器关闭后,我们通常无法再进行在线游戏,但对于一些已经关服但仍保留客户端的游戏来说,我们仍然可以尝试在本地进行游玩。本文将介绍如何在本地运行一个已关服但具有客户端的游戏的方法。 一、获取游戏客户端 要在本地运行一个已关…...
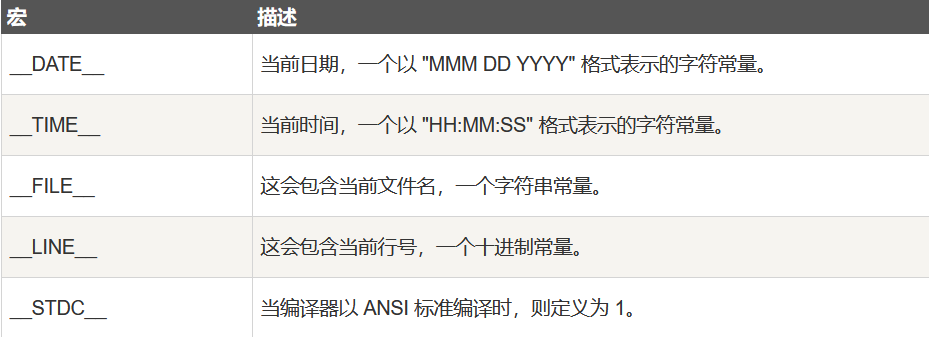
C语言编程—预处理器
预处理器不是编译器的组成部分,但是它是编译过程中一个单独的步骤。简言之,C 预处理器只不过是一个文本替换工具而已,它们会指示编译器在实际编译之前完成所需的预处理。我们将把 C 预处理器(C Preprocessor)简写为 CP…...

使用 Maya Mari 设计 3D 波斯风格道具(p1)
今天瑞云渲染小编给大家带来了Simin Farrokh Ahmadi 分享的Persian Afternoon 项目过程,解释了 Maya 和 Mari 中的建模、纹理和照明过程。 介绍 我的名字是西敏-法罗赫-艾哈迈迪,人们都叫我辛巴 在我十几岁的时候,我就意识到我喜欢艺术和创造…...

Redis分布式问题
Redis实现分布式锁 Redis为单进程单线程模式,采用队列模式将并发访问变成串行访问,且多客户端对Redis的连接并不存在竞争关系Redis中可以使用SETNX命令实现分布式锁。当且仅当 key 不存在,将 key 的值设为 value。 若给定的 key 已经存在&…...
synchronized原理
目录 一、基本特点 二、加锁过程 2.1、偏向锁 2.2、轻量级锁 2.3、重量级锁 三、其它的优化操作 3.1、锁消除 3.2、锁粗化 一、基本特点 synchronized有以下特性: 开始是乐观锁,如果锁冲突频繁,就转换为悲观锁。开始是轻量级锁,…...

10G光模块能兼容千兆光口吗
当涉及到光网络设备和光模块的兼容性时,确保正确的匹配是至关重要的。本期文章内容,我们将探讨10G光模块与千兆光口之间的兼容性。 一、10G光模块和千兆光口的基本概念 首先,我们需要了解10G光模块和千兆光口的基本概念。10G光模块是一种用…...

css 显示省略号 和 动态显示省略号
省略是非常常见的功能。 简单的实现省略号 下面的代码就可以实现省略号,超过宽度的时候就会出现省略号 .text-name{//宽高是一定要设置的不然是会无效延伸的width: 200rpx;overflow: hidden;white-space: nowrap;text-overflow: ellipsis;}稍微复杂点的情况&#…...

LeetCode 1253. 重构 2 行二进制矩阵
【LetMeFly】1253.重构 2 行二进制矩阵 力扣题目链接:https://leetcode.cn/problems/reconstruct-a-2-row-binary-matrix/ 给你一个 2 行 n 列的二进制数组: 矩阵是一个二进制矩阵,这意味着矩阵中的每个元素不是 0 就是 1。第 0 行的元素之…...

【八股】【C++】内存
这里写目录标题 内存空间分配new和delete原理C有几种newmalloc / free 与 new / delete区别malloc和free原理?delete和delete[]区别?C内存泄漏malloc申请的存储空间能用delete释放吗?malloc、calloc函数、realloc函数C中浅拷贝与深拷贝栈和队列的区别C里…...

数据库G等待
> db^Cgbasedbtpc:~$ dbaccess db10 -Database selected.> call insert_t();Routine executed.Elapsed time: 811.630 sec 磁盘逻辑日志,无BUF库> ^Cgbasedbtpc:~$ gbasedbtpc:~$ dbaccess db10 -Database selected.> call insert_t();Routine executed.Elapse…...
基础知识)
PCB封装设计指导(一)基础知识
PCB封装设计指导(一)基础知识 PCB封装是PCB设计的基础,也是PCB最关键的部件之一,尺寸需要非常准确且精确,关系到设计,生产加工,贴片等后续一系列的流程。 下面以Allegro为例介绍封装创建前的一些基础知识 1.各个psm文件代表什么 mechanical symbol 是.bsm Package sy…...

Hotkey Detective:Windows热键冲突终极诊断指南
Hotkey Detective:Windows热键冲突终极诊断指南 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经遇到…...

零基础玩转AI绘画:WuliArt Qwen-Image Turbo快速入门指南
零基础玩转AI绘画:WuliArt Qwen-Image Turbo快速入门指南 1. 为什么选择WuliArt Qwen-Image Turbo? AI绘画领域近年来发展迅猛,但对于普通用户而言,最大的痛点不是模型能力不足,而是难以在个人设备上稳定运行。WuliA…...
3步革新Windows任务栏:TranslucentTB打造个性化桌面体验
3步革新Windows任务栏:TranslucentTB打造个性化桌面体验 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 在视觉主导的数字时代…...

Mac用户福音:Qwen3-TTS声音克隆在ComfyUI上的M芯片优化方案
Mac用户福音:Qwen3-TTS声音克隆在ComfyUI上的M芯片优化方案 1. 为什么Mac用户需要特别优化方案 苹果M系列芯片凭借其出色的能效比和统一内存架构,已经成为许多创意工作者的首选。然而,在运行AI模型时,特别是像Qwen3-TTS这样的语…...

Graphormer部署案例:中小企业AI药物研发团队低成本GPU算力部署方案
Graphormer部署案例:中小企业AI药物研发团队低成本GPU算力部署方案 1. 项目背景与价值 在药物研发领域,分子属性预测是核心环节之一。传统实验方法成本高昂且周期漫长,而Graphormer作为基于纯Transformer架构的图神经网络,为这一…...

AI结对编程:与快马AI对话式迭代,智能优化你的系统ER图设计
AI结对编程:与快马AI对话式迭代,智能优化你的系统ER图设计 最近在做一个员工管理系统的数据库设计,发现ER图设计是个需要反复推敲的过程。传统方式下,每次修改都要手动调整图形,效率很低。直到尝试了InsCode(快马)平台…...

YOLO-v5实战:用预训练模型快速检测图片中的物体
YOLO-v5实战:用预训练模型快速检测图片中的物体 1. 引言:为什么选择YOLO-v5 在计算机视觉领域,物体检测是一项基础而重要的任务。YOLO(You Only Look Once)系列模型因其速度快、精度高的特点,成为工业界和…...

深入解析Jinja2模板引擎:render与generate函数的实战应用
1. Jinja2模板引擎基础入门 第一次接触Jinja2时,我完全被它的简洁和强大震撼到了。这个由Armin Ronacher开发的模板引擎,最初是为了解决Django模板的局限性而诞生的。经过多年发展,它已经成为Python生态中最受欢迎的模板引擎之一。 安装Jinja…...

8-Bit美学不妥协性能|像素剧本圣殿UI渲染与LLM推理资源隔离方案
8-Bit美学不妥协性能|像素剧本圣殿UI渲染与LLM推理资源隔离方案 1. 项目概述 像素剧本圣殿(Pixel Script Temple)是一款专为剧本创作者设计的AI辅助工具,基于Qwen2.5-14B-Instruct大模型深度微调开发。它将高性能AI推理能力与独…...
Linux I2C设备驱动避坑指南:以MPU6050为例,详解i2c_transfer与数据读取失败
Linux I2C设备驱动深度调试:MPU6050通信稳定性问题全解析 当你在嵌入式系统中集成MPU6050传感器时,是否遇到过这样的场景:设备树配置正确,驱动代码逻辑清晰,但传感器数据读取却间歇性失败,内核日志中频繁出…...