ROS:通信机制实操
目录
- ROS:通信机制
- 一、话题发布实操
- 1.1需求
- 1.2分析
- 1.3实现流程
- 1.4实现代码
- 1.4.1C++版
- 1.4.2Python版
- 1.5执行
- 二、话题订阅实操
- 2.1需求
- 2.2分析
- 2.3流程
- 2.4实现代码
- 2.4.1启动无辜GUI与键盘控制节点
- 2.4.2C++版
ROS:通信机制
一、话题发布实操
1.1需求
编码实现乌龟运动控制,让小乌龟做圆周运动。
1.2分析
乌龟运动控制实现,关键节点有两个,一个是乌龟运动显示节点 turtlesim_node,另一个是控制节点,二者是订阅发布模式实现通信的,乌龟运动显示节点直接调用即可,运动控制节点之前是使用的 turtle_teleop_key通过键盘 控制,现在需要自定义控制节点。
控制节点自实现时,首先需要了解控制节点与显示节点通信使用的话题与消息,可以使用ros命令结合计算图来获取。
1.3实现流程
通过计算图结合ros命令获取话题与消息信息。
编码实现运动控制节点。
启动 roscore、turtlesim_node 以及自定义的控制节点,查看运行结果。
1.4实现代码
1.4.1C++版
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"/*
需求:发布速度消息
话题:/turtle/cmd_vel
消息:geometry_msgs/Twist1.包含头文件
2.初始化ros节点
3.创建节点句柄
4.创建发布对象
5发布逻辑
6.spinOnce()
*/int main(int argc, char *argv[])
{// 2.初始化ros节点ros::init(argc,argv,"my_control");
// 3.创建节点句柄ros::NodeHandle nh;
// 4.创建发布对象ros::Publisher pub=nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
// 5发布逻辑ros::Rate rate(10);//组织发布的消息geometry_msgs::Twist twist;twist.linear.x=1.0;twist.linear.y=0.0;twist.linear.z=0.0;twist.angular.x=0.0;twist.angular.y=0.0;twist.angular.z=0.5;//循环发布while(ros::ok()){pub.publish(twist);//休眠rate.sleep();//回头ros::spinOnce();}
// 6.spinOnce()return 0;
}1.4.2Python版
#! /usr/bin/env python
"""编写 ROS 节点,控制小乌龟画圆准备工作:1.获取topic(已知: /turtle1/cmd_vel)2.获取消息类型(已知: geometry_msgs/Twist)3.运行前,注意先启动 turtlesim_node 节点实现流程:1.导包2.初始化 ROS 节点3.创建发布者对象4.循环发布运动控制消息"""import rospy
from geometry_msgs.msg import Twistif __name__ == "__main__":# 2.初始化 ROS 节点rospy.init_node("control_circle_p")# 3.创建发布者对象pub = rospy.Publisher("/turtle1/cmd_vel",Twist,queue_size=1000)# 4.循环发布运动控制消息rate = rospy.Rate(10)twist = Twist()twist.linear.x = 1.0twist.linear.y = 0.0twist.linear.z = 0.0twist.angular.x = 0.0twist.angular.y = 0.0twist.angular.z = 0.5while not rospy.is_shutdown():pub.publish(twist)rate.sleep()
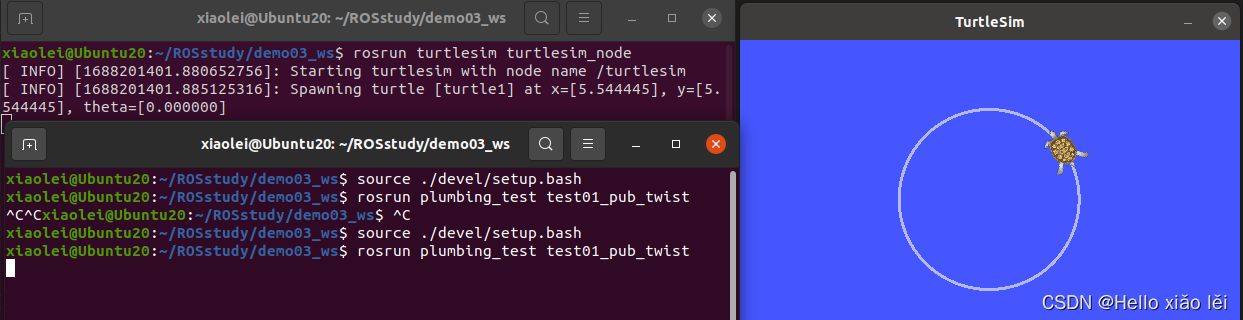
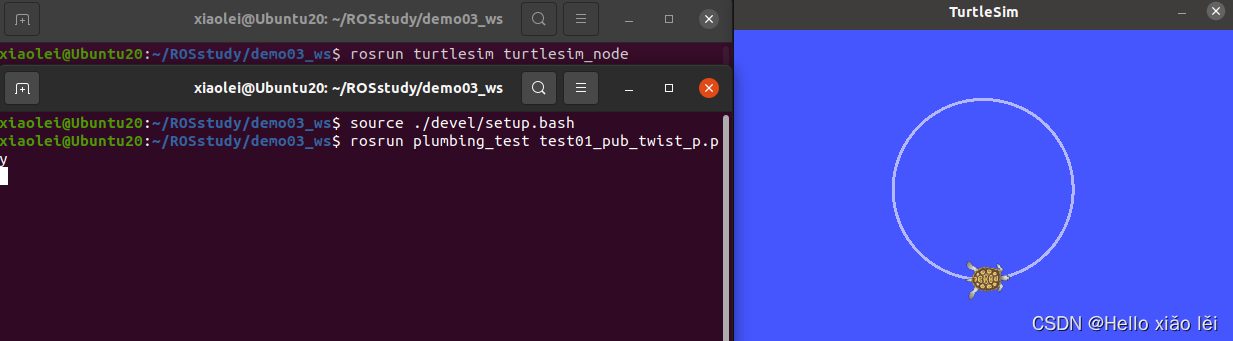
1.5执行
首先,启动 roscore;
然后启动乌龟显示节点;
最后执行运动控制节点;
二、话题订阅实操
2.1需求
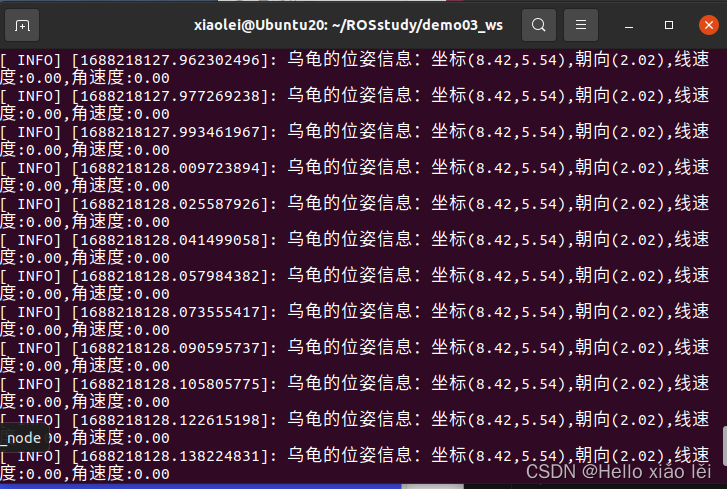
已知turtlesim中的乌龟显示节点,会发布当前乌龟的位姿(窗体中乌龟的坐标以及朝向),要求控制乌龟运动,并时时打印当前乌龟的位姿。
2.2分析
首先,需要启动乌龟显示以及运动控制节点并控制乌龟运动。
要通过ROS命令,来获取乌龟位姿发布的话题以及消息。
编写订阅节点,订阅并打印乌龟的位姿。
2.3流程
通过ros命令获取话题与消息信息。
编码实现位姿获取节点。
启动 roscore、turtlesim_node 、控制节点以及位姿订阅节点,控制乌龟运动并输出乌龟的位姿。
2.4实现代码
2.4.1启动无辜GUI与键盘控制节点
<!--启动无辜GUI与键盘控制节点-->
<launch><!--乌龟GUI--><node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen" /><!--键盘控制--><node pkg="turtlesim" type="turtle_teleop_key" name="key" output="screen" /></launch>
2.4.2C++版
#include "ros/ros.h"
#include "turtlesim/Pose.h"/*
需求:订阅乌龟的位姿信息1.包含头文件
2.初始化ros节点
3.创建节点句柄
4.创建订阅对象
5.处理订阅数据(回调函数)
6.spinOnce()
*/void doPose(const turtlesim::Pose::ConstPtr &pose)
{ROS_INFO("乌龟的位姿信息:坐标(%.2f,%.2f),朝向(%.2f),线速度:%.2f,角速度:%.2f",pose->x,pose->y,pose->theta,pose->linear_velocity,pose->angular_velocity);
}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");
// 2.初始化ros节点ros::init(argc,argv,"sub_pose");
// 3.创建节点句柄ros::NodeHandle nh;
// 4.创建订阅对象ros::Subscriber sub = nh.subscribe("/turtle1/pose",100,doPose);
// 5.处理订阅数据(回调函数)
//6.spinros::spin();// 6.spinOnce()return 0;
}

相关文章:
ROS:通信机制实操
目录 ROS:通信机制一、话题发布实操1.1需求1.2分析1.3实现流程1.4实现代码1.4.1C版1.4.2Python版 1.5执行 二、话题订阅实操2.1需求2.2分析2.3流程2.4实现代码2.4.1启动无辜GUI与键盘控制节点2.4.2C版 ROS:通信机制 一、话题发布实操 1.1需求 编码实现…...
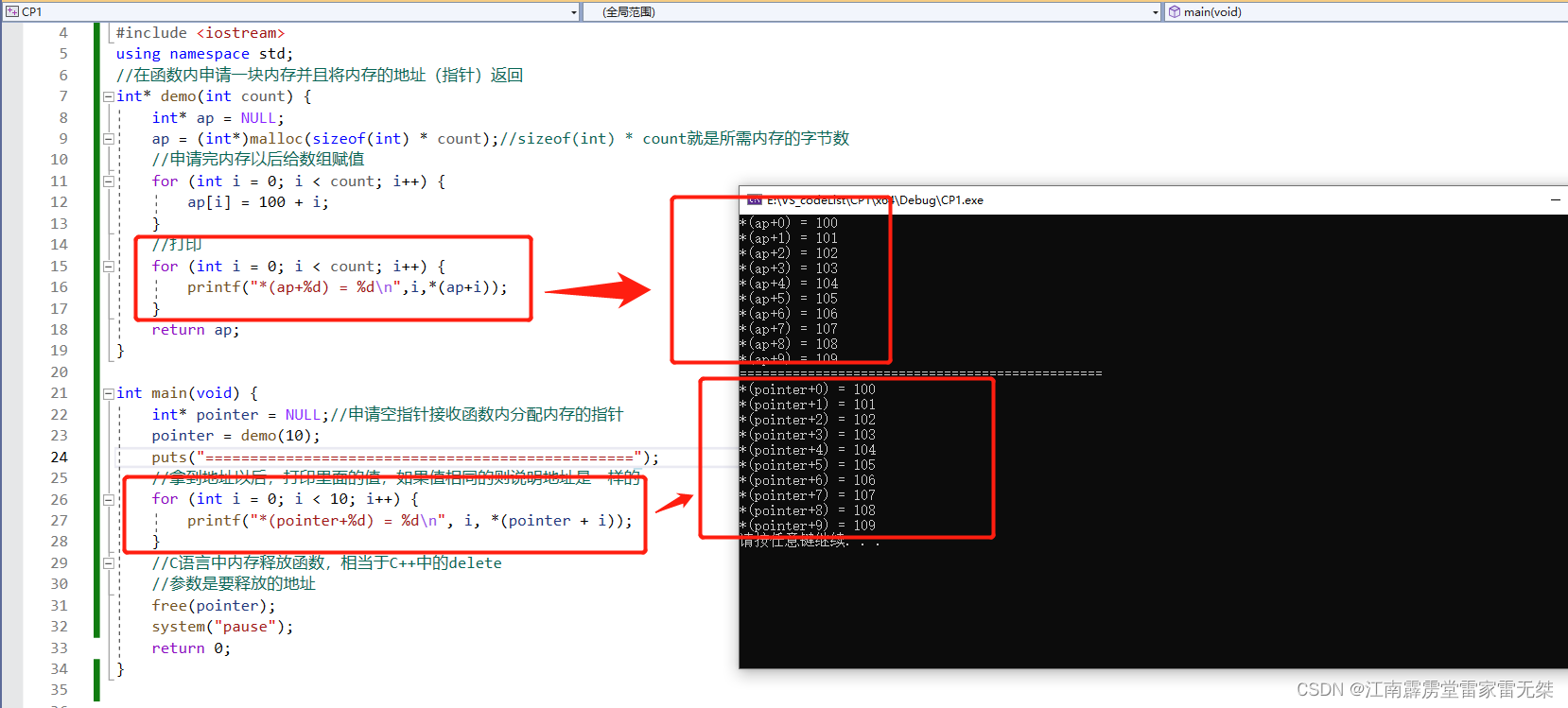
C/C++内存管理(内存分布、动态内存分配、动态内存分配与释放、内存泄漏等)
喵~ 内存之5大区(栈区、堆区、静态区、常量区、代码区)C/C中各自的内存分配操作符内存泄露?内存泄漏检测方法 内存之5大区(栈区、堆区、静态区、常量区、代码区) 1、栈区(stack):由编译器自动分…...

【云原生】软件架构的演进以及各个架构的优缺点
文章目录 1. 什么是软件架构?2. 单机架构3. 应用数据分离架构4. 应用服务集群架构5. 读写分离架构6. 冷热分离架构7.垂直分库架构8. 微服务架构9. 容器编排架构10. 小结 1. 什么是软件架构? 软件架构是指在设计和构建软件系统时,对系统的组织结构、组件、模块、接…...

力扣刷题笔记——二叉树
首先定义二叉树节点的结构体 struct TreeNode{TreeNode* left;TreeNode* right;int val;TreeNode():val(0),left(nullptr),right(nullptr){}TreeNode(int val):val(val),left(nullptr),right(nullptr){}TreeNode(int val,TreeNode* l,TreeNode* R):val(val),left(l),right(R){…...
)
【华为OD机试】工号不够用了怎么办?(python, java, c++, js)
工号不够用了怎么办? 前言:本专栏将持续更新华为OD机试题目,并进行详细的分析与解答,包含完整的代码实现,希望可以帮助到正在努力的你。关于OD机试流程、面经、面试指导等,如有任何疑问,欢迎联系我,wechat:steven_moda;email:nansun0903@163.com;备注:CSDN。 题目…...

【leetcode】198. 打家劫舍
你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装有相互连通的防盗系统,如果两间相邻的房屋在同一晚上被小偷闯入,系统会自动报警。 给定一个代表每个房屋存放金额的非…...
【react全家桶学习】react的 (新/旧) 生命周期(重点)
目录 生命周期(旧) 挂载时的生命周期 constructor(props) componentWillMount()-------------新生命周期已替换 render() componentDidMount()--- 组件…...

Gradio私网和公网的使用
Gradio私网问题 如果部署的服务器只有私有地址,那么无法直接从外部网络中的其他计算机访问该服务器和其中运行的 Gradio 应用程序。在这种情况下,你可以考虑使用端口转发技术,将服务器的私有地址映射到一定的公开地址上,从而可以…...
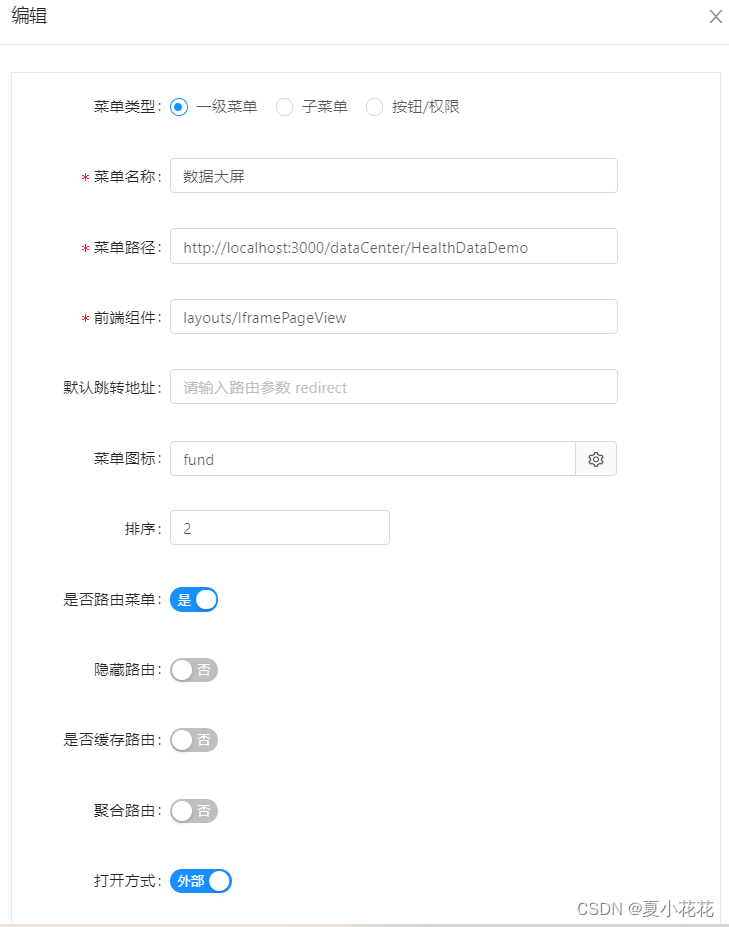
ant design vue 配置菜单外部打开
实现如下 菜单配置 前端项目地址:http://localhost:3000 菜单路径:dataCenter/HealthData 打开方式:外部 在项目中src-->config-->router.config.js文件 将需要再外部打开的菜单地址进行如下配置 菜单地址:/dataCenter/Hea…...

YOLOv5/v7 添加注意力机制,30多种模块分析⑦,CCN模块,GAMAttention模块
目录 一、注意力机制介绍1、什么是注意力机制?2、注意力机制的分类3、注意力机制的核心 二、CCN模块1、CCN模块的原理2、实验结果3、应用示例 三、GAMAttention模块1、GAMAttention模块的原理2、实验结果3、应用示例 大家好,我是哪吒。 🏆本…...
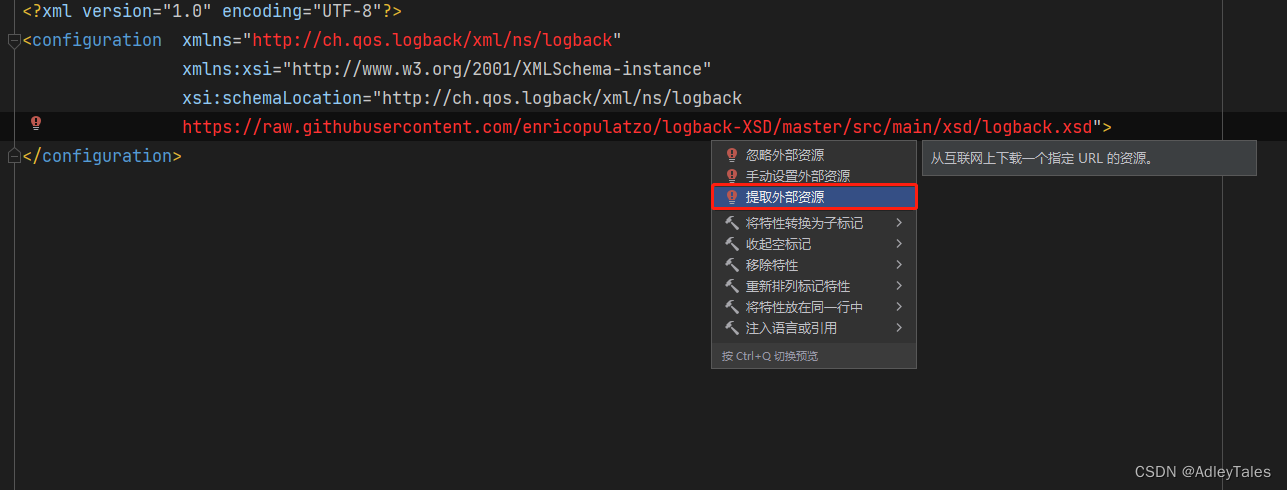
IDEA下Logback.xml自动提示功能配置
首先打开logback的配置文件,在configuration标签中加入xsd的配置 <configuration xmlns"http://ch.qos.logback/xml/ns/logback"xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xsi:schemaLocation"http://ch.qos.logback/xml…...
)
CUDA编程模型系列八(原子操作 / 规约 / 向量元素求和)
本系列视频目的是帮助开发者们一步步地学会利用CUDA编程模型加速GPU应用, 我们的口号是: 让GPU飞起来 本期我介绍了cuda 当中规约算法的一种情况, 也是小何尚职业生涯中的第一道面试题, 计算数组中所有元素的和. CUDA编程模型系列八(原子操作 / 规约 / 向量元素求和) #include…...
)
go语言系列基础教程总结(4)
1、goroutine和channel 每执行一次go func()就创建一个 goroutine,包含要执行的函数和上下文信息。 goroutine 是Go程序并发的执行体,channel是它们之间的沟通连接通道。 var ch1 chan int. //声明一个整型的通道 2、channel 常用操作 //定义一个…...
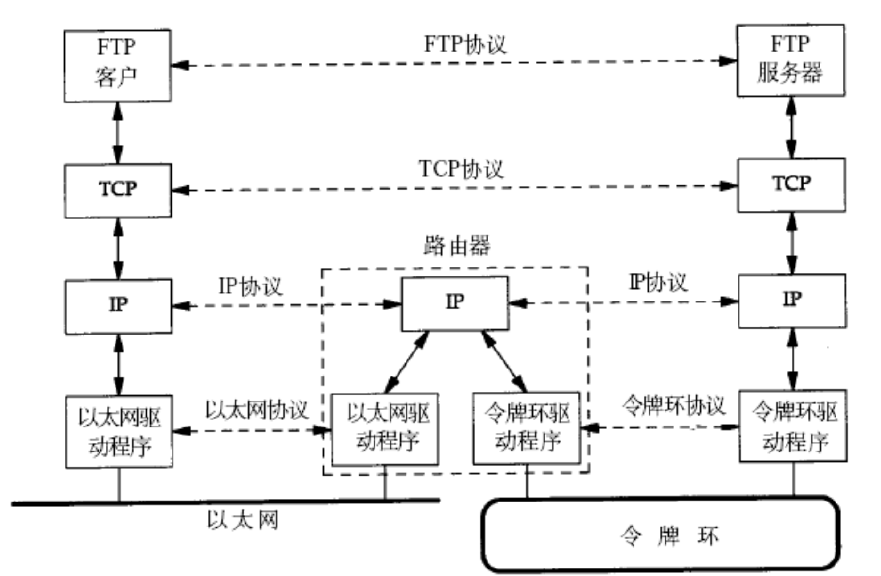
网络基础一:网络协议初识与网络传输基本流程
目录 网络协议认识“协议”网络协议初识协议分层OSI七层模型(理论模型)TCP/IP五层(或四层)模型(工程实现模型) 网络中的地址管理MAC地址IP地址 网络传输基本流程路由的本质 数据包封装和分用网络协议需要解决的问题 网络协议 计算…...
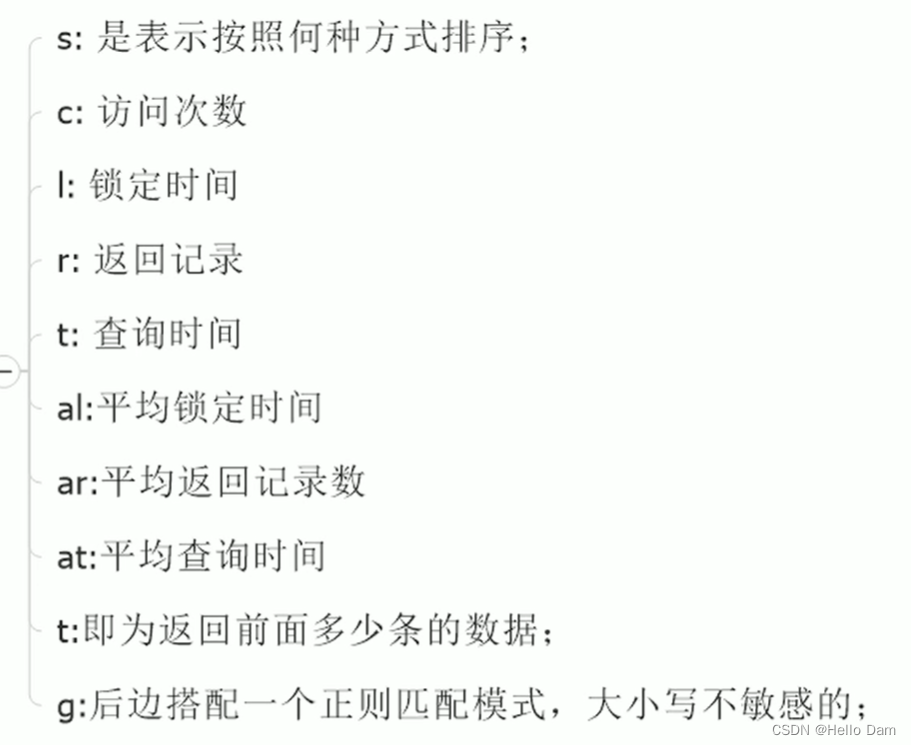
Mysql找出执行慢的SQL【慢查询日志使用与分析】
分析慢SQL的步骤 慢查询的开启并捕获:开启慢查询日志,设置阈值,比如超过5秒钟的就是慢SQL,至少跑1天,看看生产的慢SQL情况,并将它抓取出来explain 慢SQL分析show Profile。(比explain还要详细…...
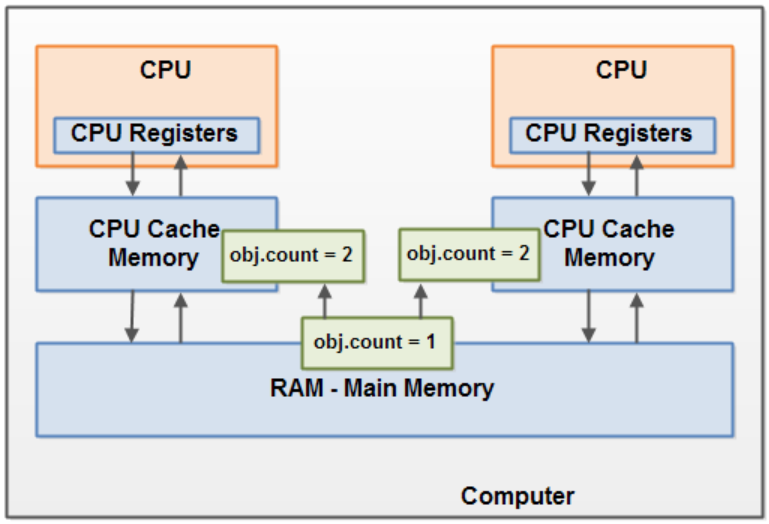
设计模式3:单例模式:JMM与volatile和synchronized的关系
本文目录 JMM简介Java 内部内存模型(The Internal Java Memory Model)硬件内存架构(Hardware Memory Architecture)弥合 Java 内存模型和硬件内存架构之间的差距(Bridging The Gap Between The Java Memory Model And The Hardware Memory Architecture)1.共享对象的可见性2.竞…...
)
一个简单的OPC UA/ModbusTCP 网关(Python)
使用我前面几篇博文的内容,能够使用Python编写一个最简单的OPC UA /ModbusTCP网关。 从这个程序可以看出: 应用OPC UA 并不难,现在我们就可以应用到工程应用中,甚至DIY项目也可以。不必采用复杂的工具软件。使用Python 来构建工…...
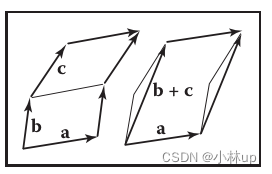
线性代数行列式的几何含义
行列式可以看做是一系列列向量的排列,并且每个列向量的分量可以理解为其对应标准正交基下的坐标。 行列式有非常直观的几何意义,例如: 二维行列式按列向量排列依次是 a \mathbf{a} a和 b \mathbf{b} b,可以表示 a \mathbf{a} a和…...

python用flask将视频显示在网页上
注意我们的return返回值必须是以下之一,否则会报错 from flask import Flask, render_template, Response import cv2app Flask(__name__)app.route(/) def index():return render_template(index.html)def gen(camera):while True:success, image camera.read(…...

【数据挖掘】时间序列教程【一】
第一章 说明 对于时间序列的研究,可以追溯到19世纪末和20世纪初。当时,许多学者开始对时间相关的经济和社会现象进行研究,尝试发现其规律和趋势。其中最早的时间序列研究可以追溯到法国经济学家易贝尔(Maurice Allais)…...

Wan2.2-T2V-A5B实战:GitHub版本管理下的团队协作开发流程
Wan2.2-T2V-A5B实战:GitHub版本管理下的团队协作开发流程 你是不是也遇到过这样的场景?团队几个人一起开发一个基于Wan2.2-T2V-A5B的应用项目,代码改来改去,最后谁改了哪部分、为什么改、线上版本和本地版本哪个更新,…...

Zephyr与MCUBoot的深度整合:从构建到安全启动的完整指南
1. 为什么需要安全启动? 在嵌入式开发中,设备固件的安全性往往是最容易被忽视的一环。想象一下,如果你的智能门锁固件被恶意篡改,或者医疗设备的程序被非法替换,后果会有多严重?这就是为什么我们需要MCUBoo…...

YOLO-v8.3实战:用AI识别图片中的物体,5分钟完成你的第一个检测项目
YOLO-v8.3实战:用AI识别图片中的物体,5分钟完成你的第一个检测项目 你是否曾经好奇,那些能自动识别照片中物体的人工智能是如何工作的?想象一下,你拍了一张街景照片,AI不仅能告诉你照片里有汽车、行人和红…...

从Gazebo到真实硬件:robot_state_publisher在ROS 2仿真迁移中的5个关键配置项
从Gazebo到真实硬件:robot_state_publisher在ROS 2仿真迁移中的5个关键配置项 当你在Gazebo中完成机器人运动算法的仿真验证后,下一步就是将这套系统部署到真实硬件上。这个过程中,robot_state_publisher的配置往往是工程师们最容易踩坑的环节…...

手机号查询QQ号:技术解析与实用指南
手机号查询QQ号:技术解析与实用指南 【免费下载链接】phone2qq 项目地址: https://gitcode.com/gh_mirrors/ph/phone2qq 当你更换手机后忘记QQ账号,或需要验证手机号与QQ的绑定关系时,phone2qq项目提供了一种高效解决方案。这是一个基…...

PCF8574驱动库深度解析:I²C扩展IO、中断与编码器集成
1. 项目概述PCF8574 是一款经典的 IC 总线数字 I/O 扩展芯片,由 NXP(原 Philips)设计,广泛应用于资源受限的嵌入式系统中。其核心价值在于仅需两根信号线(SDA/SCL)即可扩展 8 路可编程双向数字 I/O…...

突破方舟生存进化技术壁垒的智能管理工具
突破方舟生存进化技术壁垒的智能管理工具 【免费下载链接】TEKLauncher Launcher for ARK: Survival Evolved 项目地址: https://gitcode.com/gh_mirrors/te/TEKLauncher 你是否曾因MOD安装顺序错误导致游戏频繁崩溃?是否在搭建私人服务器时被端口配置弄得晕…...
)
从混乱到清晰:用QJsonObject重构你的Qt网络API数据解析层(避坑指南)
从混乱到清晰:用QJsonObject重构你的Qt网络API数据解析层(避坑指南) 在Qt开发中,与后端RESTful API交互是常见需求,但面对复杂、嵌套的JSON响应数据时,很多开发者容易陷入"面条代码"的泥潭。本文…...

新手福音:无需github,在快马平台轻松入门第一个web应用
最近在学前端开发时,发现很多教程都推荐从GitHub克隆项目来练习,但GitHub经常访问不稳定,对新手特别不友好。好在发现了InsCode(快马)平台,不用折腾GitHub就能直接上手写代码,特别适合我这种刚入门的小白。今天就用它做…...

华帝COO韩伟:破局立新,“全域协同、效率革命”迎战行业新周期
3月30日,华帝“人生净界”新品发布会在杭州举行。这场发布会,不仅官宣全新代言人张凌赫并重磅发布非遗美学瓷话套系,清晰地传递出华帝面向未来的战略航向。发布会上,华帝股份副总裁兼COO韩伟深度剖析厨电行业变革趋势,…...