基于深度学习的高精度道路瑕疵检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于深度学习的高精度道路瑕疵(裂纹(Crack)、检查井(Manhole)、网(Net)、裂纹块(Patch-Crack)、网块(Patch-Net)、坑洼块(Patch-Pothole)、坑洼(Pothole)等)检测系统可用于日常生活中或野外来检测与定位道路瑕疵目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检测模型训练数据集,使用Pysdie6库来搭建页面展示系统,同时支持ONNX、PT等模型作为权重模型的输出。本系统支持的功能包括道路瑕疵训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;摄像头的上传、检测、可视化结果展示与结束检测;已检测目标列表、位置信息;前向推理用时。另外本道路瑕疵检测系统同时支持原始图像与检测结果图像的同时展示,原始视频与检测结果视频的同时展示。本博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。

基本介绍
近年来,机器学习和深度学习取得了较大的发展,深度学习方法在检测精度和速度方面与传统方法相比表现出更良好的性能。YOLOv5是单阶段目标检测算法YOLO的第五代,根据实验得出结论,其在速度与准确性能方面都有了明显提升,开源的代码可见https://github.com/ultralytics/yolov5。因此本博文利用YOLOv5检测算法实现一种高精度道路瑕疵检测模型,再搭配上Pyside6库写出界面系统,完成目标检测页面的开发。注意到YOLO系列算法的最新进展已有YOLOv6、YOLOv7、YOLOv8等算法,将本系统中检测算法替换为最新算法的代码也将在后面发布,欢迎关注收藏。
环境搭建
(1)下载完整文件到自己电脑上,然后使用cmd打开到文件目录
(2)利用Conda创建环境(Anacodna),conda create -n yolo5 python=3.8 然后安装torch和torchvision(pip install torch1.10.0+cu113 torchvision0.11.0+cu113 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna.tsinghua.edu.cn/simple)其中-i https://pypi.tuna.tsinghua.edu.cn/simple代表使用清华源,这行命令要求nvidia-smi显示的CUDA版本>=11.3,最后安装剩余依赖包使用:pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple


(3)安装Pyside6库 pip install pyside6==6.3 -i https://pypi.tuna.tsinghua.edu.cn/simple

(4)对于windows系统下的pycocotools库的安装:pip install pycocotools-windows -i https://pypi.tuna.tsinghua.edu.cn/simple
界面及功能展示
下面给出本博文设计的软件界面,整体界面简洁大方,大体功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;已检测目标列表、位置信息;前向推理用时。希望大家可以喜欢,初始界面如下图:

模型选择与初始化
用户可以点击模型权重选择按钮上传训练好的模型权重,训练权重格式可为.pt、.onnx以及。engine等,之后再点击模型权重初始化按钮可实现已选择模型初始化信息的设置。


置信分与IOU的改变
在Confidence或IOU下方的输入框中改变值即可同步改变滑动条的进度,同时改变滑动条的进度值也可同步改变输入框的值;Confidence或IOU值的改变将同步到模型里的配置,将改变检测置信度阈值与IOU阈值。
图像选择、检测与导出
用户可以点击选择图像按钮上传单张图片进行检测与。

再点击图像检测按钮可完成输入图像的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

再点击检测结果展示按钮可在系统左下方显示输入图像检测的结果,系统将显示出图片中的目标的类别、位置和置信度信息。

点击图像检测结果导出按钮即可导出检测后的图像,在保存栏里输入保存的图片名称及后缀即可实现检测结果图像的保存。

点击结束图像检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
视频选择、检测与导出
用户可以点击选择视频按钮上传视频进行检测与,之后系统会将视频的第一帧输入到系统界面的左上方显示。

再点击视频检测按钮可完成输入视频的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击暂停视频检测按钮即可实现输入视频的暂停,此时按钮变为继续视频检测,输入视频帧与帧检测结果会保留在系统界面,可点击下拉目标框选择已检测目标的坐标位置信息,再点击继续视频检测按钮即可实现输入视频的检测。
点击视频检测结果导出按钮即可导出检测后的视频,在保存栏里输入保存的图片名称及后缀即可实现检测结果视频的保存。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
摄像头打开、检测与结束
用户可以点击打开摄像头按钮来打开摄像头设备进行检测与,之后系统会将摄像头图像输入到系统界面的左上方显示。

再点击摄像头检测按钮可完成输入摄像头的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频或打开摄像按钮来上传图像、视频或打开摄像头。
算法原理介绍
本系统采用了基于深度学习的单阶段目标检测算法YOLOv5,相比于YOLOv3和YOLOv4,YOLOv5在检测精度和速度上都有很大的提升。YOLOv5算法的核心思想是将目标检测问题转化为一个回归问题,通过直接预测物体中心点的坐标来代替Anchor框。此外,YOLOv5使用SPP(Spatial Pyramid Pooling)的特征提取方法,这种方法可以在不增加计算量的情况下,有效地提取多尺度特征,提高检测性能。YOLOv5s模型的整体结构如下图所示。

YOLOv5网络结构是由Input、Backbone、Neck、Prediction组成。YOLOv5的Input部分是网络的输入端,采用Mosaic数据增强方式,对输入数据随机裁剪,然后进行拼接。Backbone是YOLOv5提取特征的网络部分,特征提取能力直接影响整个网络性能。在特征提取阶段,YOLOv5使用CSPNet(Cross Stage Partial Network)结构,它将输入特征图分为两部分,一部分通过一系列卷积层进行处理,另一部分直接进行下采样,最后将这两部分特征图进行融合。这种设计使得网络具有更强的非线性表达能力,可以更好地处理目标检测任务中的复杂背景和多样化物体。在Neck阶段使用连续的卷积核C3结构块融合特征图。在Prediction阶段,模型使用结果特征图预测目标的中心坐标与尺寸信息。博主觉得YOLOv5不失为一种目标检测的高性能解决方案,能够以较高的准确率对目标进行分类与定位。当然现在YOLOv6、YOLOv7、YOLOv8等算法也在不断提出和改进,后续博主也会将这些算法融入到本系统中,敬请期待。
数据集介绍
本系统使用的道路瑕疵数据集手动标注了(裂纹(Crack)、检查井(Manhole)、网(Net)、裂纹块(Patch-Crack)、网块(Patch-Net)、坑洼块(Patch-Pothole)、坑洼(Pothole)和其他(other))这八个类别,数据集总计6000张图片。该数据集中类别都有大量的旋转和不同的光照条件,有助于训练出更加鲁棒的检测模型。本文实验的道路瑕疵检测数据集包含训练集4822张图片,验证集1178张图片,选取部分数据部分样本数据集如下图所示。由于YOLOv5算法对输入图片大小有限制,需要将所有图片调整为相同的大小。为了在不影响检测精度的情况下尽可能减小图片的失真,我们将所有图片调整为640x640的大小,并保持原有的宽高比例。此外,为了增强模型的泛化能力和鲁棒性,我们还使用了数据增强技术,包括随机旋转、缩放、裁剪和颜色变换等,以扩充数据集并减少过拟合风险。

关键代码解析
本系统的深度学习模型使用PyTorch实现,基于YOLOv5算法进行目标检测。在训练阶段,我们使用了预训练模型作为初始模型进行训练,然后通过多次迭代优化网络参数,以达到更好的检测性能。在训练过程中,我们采用了学习率衰减和数据增强等技术,以增强模型的泛化能力和鲁棒性。
在测试阶段,我们使用了训练好的模型来对新的图片和视频进行检测。通过设置阈值,将置信度低于阈值的检测框过滤掉,最终得到检测结果。同时,我们还可以将检测结果保存为图片或视频格式,以便进行后续分析和应用。本系统基于YOLOv5算法,使用PyTorch实现。代码中用到的主要库包括PyTorch、NumPy、OpenCV、PyQt等。


Pyside6界面设计
Pyside6是Python语言的GUI编程解决方案之一,可以快速地为Python程序创建GUI应用。在本博文中,我们使用Pyside6库创建一个图形化界面,为用户提供简单易用的交互界面,实现用户选择图片、视频进行目标检测。
我们使用Qt Designer设计图形界面,然后使用Pyside6将设计好的UI文件转换为Python代码。图形界面中包含多个UI控件,例如:标签、按钮、文本框、多选框等。通过Pyside6中的信号槽机制,可以使得UI控件与程序逻辑代码相互连接。
实验结果与分析
在实验结果与分析部分,我们使用精度和召回率等指标来评估模型的性能,还通过损失曲线和PR曲线来分析训练过程。在训练阶段,我们使用了前面介绍的道路瑕疵数据集进行训练,使用了YOLOv5算法对数据集训练,总计训练了300个epochs。在训练过程中,我们使用tensorboard记录了模型在训练集和验证集上的损失曲线。从下图可以看出,随着训练次数的增加,模型的训练损失和验证损失都逐渐降低,说明模型不断地学习到更加精准的特征。在训练结束后,我们使用模型在数据集的验证集上进行了评估,得到了以下结果。
下图展示了本博文在使用YOLOv5模型对道路瑕疵数据集进行训练时候的Mosaic数据增强图像。


综上,本博文训练得到的YOLOv5模型在数据集上表现良好,具有较高的检测精度和鲁棒性,可以在实际场景中应用。另外本博主对整个系统进行了详细测试,最终开发出一版流畅的高精度目标检测系统界面,就是本博文演示部分的展示,完整的UI界面、测试图片视频、代码文件等均已打包上传,感兴趣的朋友可以关注我私信获取。另外本博文的PDF与更多的目标检测系统请关注笔者的微信公众号 BestSongC (原Nuist计算机视觉与模式)来获取。
其他基于深度学习的目标检测系统如西红柿、猫狗、山羊、野生目标、烟头、二维码、头盔、交警、野生动物、野外烟雾、人体摔倒、红外行人、家禽猪、苹果、推土机、蜜蜂、打电话、鸽子、足球、奶牛、人脸口罩、安全背心、烟雾检测系统等有需要的朋友关注我,从博主其他中获取下载链接。
完整项目目录如下所示:

相关文章:
基于深度学习的高精度道路瑕疵检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于深度学习的高精度道路瑕疵(裂纹(Crack)、检查井(Manhole)、网(Net)、裂纹块(Patch-Crack)、网块(Patch-Net)、坑洼块&#x…...

【裸辞转行】是告别,也是新的开始
一年多了没有更新,是因为去年身体加心理因素辞职了,并且大概率不会再做程序员了,嗯。本来觉得可能再也不会打开 CSDN 了,想了想,还是来做个告别吧,任何事情都该有始有终才对。 回忆碎碎念 是在去年的 11 …...
了解交换机接口的链路类型(access、trunk、hybrid)
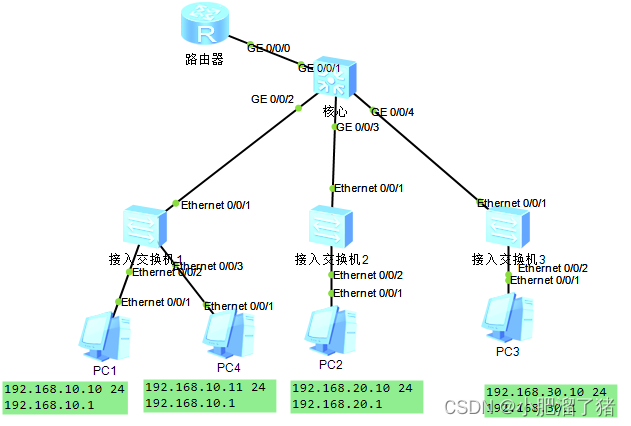
上一个章节中讲到了vlan的作用及使用,这篇了解一下交换机接口的链路类型和什么情况下使用 vlan在数据包中是如何体现的,在上一篇的时候提到测试了一下,从PC1去访问PC4的时候,只从E0/0/2发送给了E0/0/3这是,因为两个接…...

Android系统启动流程分析
当按下Android系统的开机电源按键时候,硬件会触发引导芯片,执行预定义的代码,然后加载引导程序(BootLoader)到RAM,Bootloader是Android系统起来前第一个程序,主要用来拉起Android系统程序,Android系统被拉起…...

如何在Ubuntu上安装OpenneBula
OpenNebula是一个开源云计算平台,允许我们在完全虚拟化云中组合和管理VMware和KVM虚拟机 第1步:安装MariaDB数据库服务器 OpenNebula还需要一个数据库服务器来存储其内容。 安装MariaDB: 1 2 sudo apt update sudo apt install mariadb-s…...
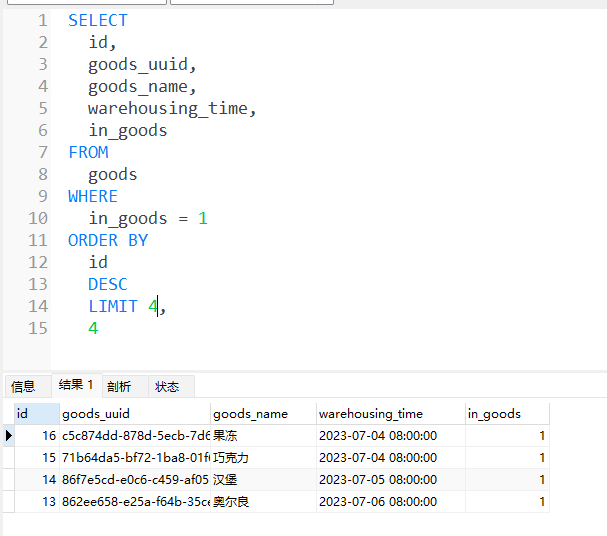
解决MySQL中分页查询时多页有重复数据,实际只有一条数据的问题
0 前言 有一个离奇的BUG,在查询时,第一页跟第二页有一个共同的数据。有的数据却不显示。 后来发现是在SQL排序时没用主键排序。 解决:使用主键排序 以下是我准备的举例,可以自己试试。 1 数据准备 SET NAMES utf8mb4; SET FORE…...
【数据结构】时间复杂度---OJ练习题
目录 🌴时间复杂度练习 📌面试题--->消失的数字 题目描述 题目链接:面试题 17.04. 消失的数字 🌴解题思路 📌思路1: malloc函数用法 📌思路2: 📌思路3&…...

京东自动化功能之商品信息监控是否有库存
这里有两个参数,分别是area和skuids area是地区编码,我这里统计了全国各个区县的area编码,用户可以根据实际地址进行构造skuids是商品的信息ID填写好这两个商品之后,会显示两种状态,判断有货或者无货状态,详情如下图所示 简单编写下python代码,比如我们的地址是北京市…...
【SwitchyOmega】SwitchyOmega 安装及使用
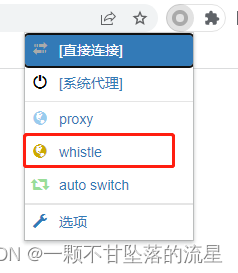
文章目录 安装教程使用教程 安装教程 SwitchyOmega 谷歌商店下载链接:https://chrome.google.com/webstore/detail/proxy-switchyomega/padekgcemlokbadohgkifijomclgjgif?hlen-US 在谷歌商店搜索 SwitchyOmega, 选择 Proxy SwitchyOmega 点击 Add t…...
CentOS5678 repo源 地址 阿里云开源镜像站
CentOS5678 repo 地址 阿里云开源镜像站 https://mirrors.aliyun.com/repo/ CentOS-5.repo https://mirrors.aliyun.com/repo/Centos-5.repo [base] nameCentOS-$releasever - Base - mirrors.aliyun.com failovermethodpriority baseurlhttp://mirrors.aliyun.com/centos/$r…...
)
【LLM】Langchain使用[二](模型链)
文章目录 1. SimpleSequentialChain2. SequentialChain3. 路由链 Router Chain Reference 1. SimpleSequentialChain 场景:一个输入和一个输出 from langchain.chat_models import ChatOpenAI #导入OpenAI模型 from langchain.prompts import ChatPromptTempla…...

简单机器学习工程化过程
1、确认需求(构建问题) 我们需要做什么? 比如根据一些输入数据,预测某个值? 比如输入一些特征,判断这个是个什么动物? 这里我们要可以尝试分析一下,我们要处理的是个什么问题&…...
【MongoDB】SpringBoot整合MongoDB
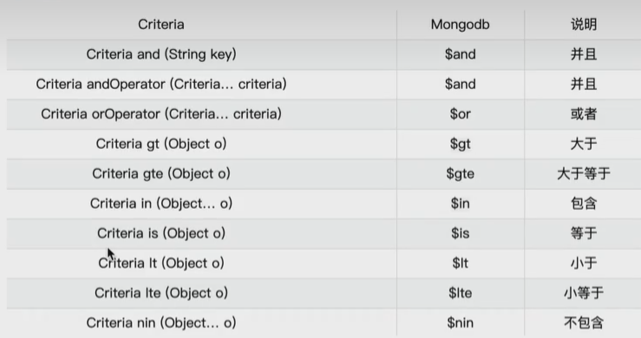
【MongoDB】SpringBoot整合MongoDB 文章目录 【MongoDB】SpringBoot整合MongoDB0. 准备工作1. 集合操作1.1 创建集合1.2 删除集合 2. 相关注解3. 文档操作3.1 添加文档3.2 批量添加文档3.3 查询文档3.3.1 查询所有文档3.3.2 根据id查询3.3.3 等值查询3.3.4 范围查询3.3.5 and查…...
对齐音乐bpm的技术)
关于游戏引擎(godot)对齐音乐bpm的技术
引擎默认底层 1. _process(): 每秒钟调用60次(无限的) 数学 1. bpm1分钟节拍数量60s节拍数量 bpm120 60s120拍 2. 每拍子时间 60/bpm 3. 每个拍子触发周期所需要的帧数 每拍子时间*60(帧率) 这个是从帧数级别上对齐拍子的时间&#x…...
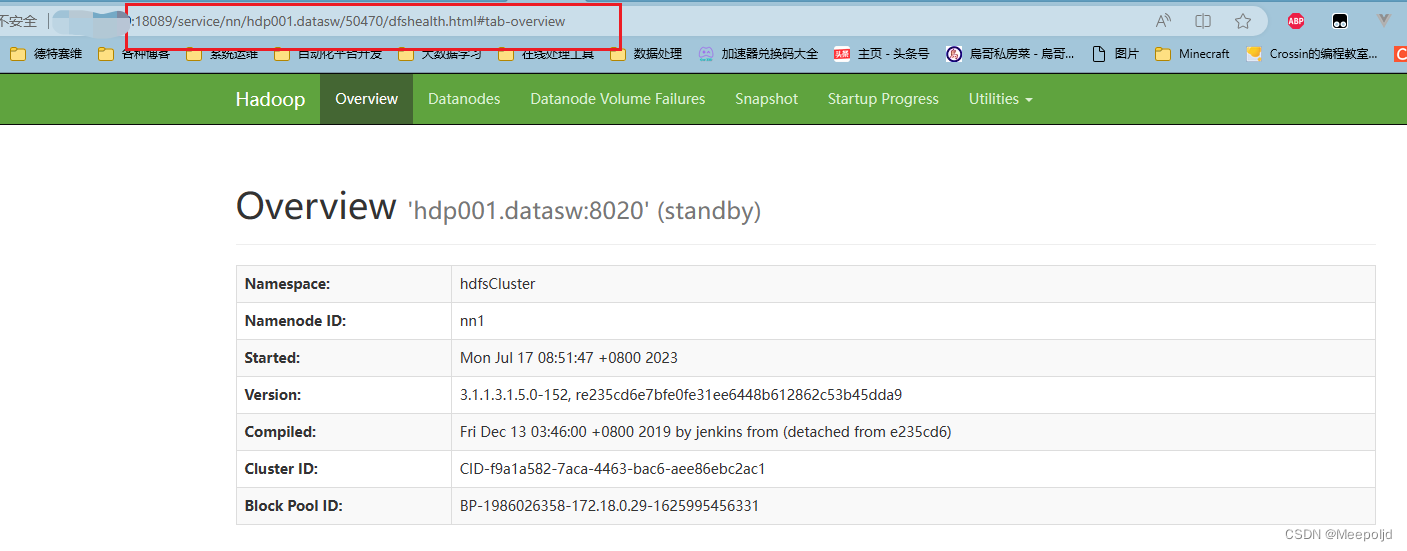
【Go】实现一个代理Kerberos环境部分组件控制台的Web服务
实现一个代理Kerberos环境部分组件控制台的Web服务 背景安全措施引入的问题SSO单点登录 过程整体设计路由反向代理登录会话组件代理YarnHbase 结果 背景 首先要说明下我们目前有部分集群的环境使用的是HDP-3.1.5.0的大数据集群,除了集成了一些自定义的服务以外&…...

Spring Security 6.x 系列【63】扩展篇之匿名认证
有道无术,术尚可求,有术无道,止于术。 本系列Spring Boot 版本 3.1.0 本系列Spring Security 版本 6.1.0 本系列Spring Authorization Server 版本 1.1.0 源码地址:https://gitee.com/pearl-organization/study-spring-security-demo 文章目录 1. 概述2. 配置3. Anonymo…...

供应链管理系统有哪些?
1万字干货分享,国内外 20款 供应链管理软件都给你讲的明明白白。如果你还不知道怎么选择,一定要翻到第三大段,这里我将会通过8年的软件产品选型经验告诉你,怎么样才能快速选到适合自己的软件工具。 (为防后续找不到&a…...
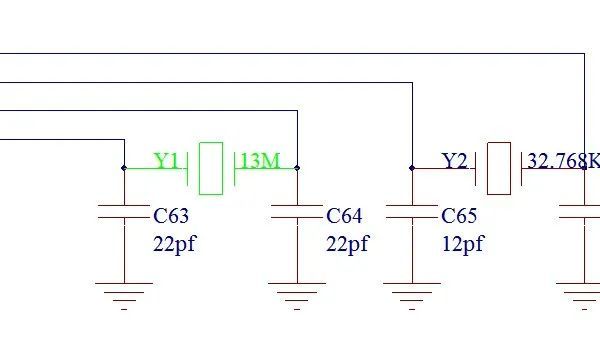
如何在PADS Logic中查找器件
PADS Logic提供类似于Windows的查找功能,可以进行器件的查找。 (1)在Logic设计界面中,将菜单显示中的“选择工具栏”进行打开,如图1所示,会弹出对应的“选择工具栏”的分栏菜单选项,如图2所示。…...

Android 生成pdf文件
Android 生成pdf文件 1.使用官方的方式 使用官方的方式也就是PdfDocument类的使用 1.1 基本使用 /**** 将tv内容写入到pdf文件*/RequiresApi(api Build.VERSION_CODES.KITKAT)private void newPdf() {// 创建一个PDF文本对象PdfDocument document new PdfDocument();//创建…...
Kafka 入门到起飞 - 生产者发送消息流程解析
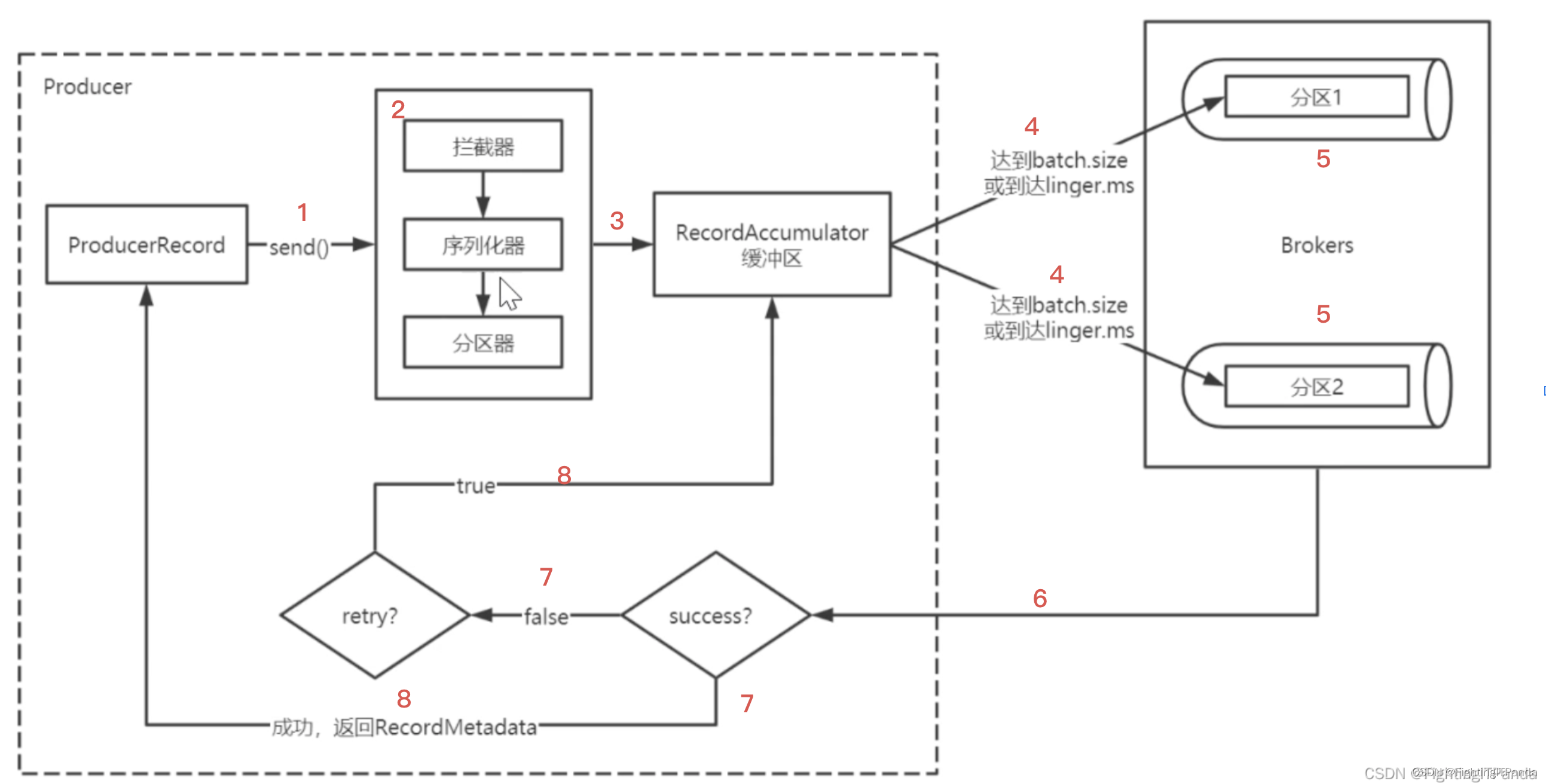
生产者通过send()方法发送消息消息会经过拦截器->序列化器->分区器 进行加工然后将消息存在缓冲区当缓冲区中消息达到条件会按批次发送到broker对应分区上broker将接收到的消息进行刷盘持久化消息处理broker会返回给producer响应落盘成功返回元数据…...
如何为Unity游戏实现实时翻译:XUnity Auto Translator完整指南
如何为Unity游戏实现实时翻译:XUnity Auto Translator完整指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 你是否遇到过想玩一款优秀的Unity游戏,却发现它只支持日语或英语&am…...

若依框架二次开发避坑指南:手把手教你定制菜品管理系统
若依框架二次开发实战:从零构建餐饮管理系统的高效避坑手册 当接到基于若依框架开发餐饮管理系统的任务时,很多开发者会陷入"能用但不好用"的困境。本文将分享我在三个不同规模餐饮项目中积累的实战经验,重点解析那些官方文档不会告…...

网络安全学习攻略宝典,从菜鸟到高手的必由之路
想成为一名真正的黑客到底该怎么学? 从0开始又该从何学起呢? 很多人想学习网络安全,却不知道从何下手。别迷茫,这篇文章为你指明方向,无论你是零基础小白,还是有一定基础想提升的人,都能从中找…...
)
不止是收发数据:挖掘常兴串口调试助手V5.01的5个隐藏效率神器(自动回复/进制转换/批量发送)
挖掘常兴串口调试助手V5.01的5个隐藏效率神器 在嵌入式开发领域,串口调试工具早已超越了简单的数据收发功能。常兴串口调试助手V5.01作为一款专业级工具,集成了多项提升开发效率的实用功能。本文将深入解析五个常被忽视但极具价值的隐藏功能,…...

FLUX.1-dev像素生成器效果对比:不同Scale值对像素结构强度影响实测
FLUX.1-dev像素生成器效果对比:不同Scale值对像素结构强度影响实测 1. 像素艺术生成技术概述 像素幻梦(Pixel Dream Workshop)是基于FLUX.1-dev扩散模型构建的专业像素艺术生成工具。它采用16-bit现代明亮风格设计,为创作者提供…...

Charticulator:数据可视化的自由创作平台与技术革命
Charticulator:数据可视化的自由创作平台与技术革命 【免费下载链接】charticulator Interactive Layout-Aware Construction of Bespoke Charts 项目地址: https://gitcode.com/gh_mirrors/ch/charticulator 当数据分析师面对预设模板无法表达复杂数据关系时…...
)
手把手教你解决Ubuntu22.04中CH341驱动签名问题(附完整安装流程)
手把手教你解决Ubuntu22.04中CH341驱动签名问题(附完整安装流程) 当你尝试在Ubuntu22.04上使用CH341串口设备时,可能会遇到一个令人头疼的问题——驱动签名验证失败。这个错误不仅会阻止驱动正常加载,还会让许多Linux新手感到束手…...

4步构建高效视频处理流水线:VideoFusion全功能指南
4步构建高效视频处理流水线:VideoFusion全功能指南 【免费下载链接】VideoFusion 一站式短视频拼接软件 无依赖,点击即用,自动去黑边,自动帧同步,自动调整分辨率,批量变更视频为横屏/竖屏 项目地址: https://gitcode.com/gh_mirrors/vi/VideoFusion 功能特性…...

零基础玩转VideoFusion:高效视频批量处理全攻略
零基础玩转VideoFusion:高效视频批量处理全攻略 【免费下载链接】VideoFusion 一站式短视频拼接软件 无依赖,点击即用,自动去黑边,自动帧同步,自动调整分辨率,批量变更视频为横屏/竖屏 项目地址: https://gitcode.com/gh_mirrors/vi/VideoFusion 在数字内容创…...

5分钟极速部署!Billion Mail容器化方案助力邮件营销升级 [特殊字符]
5分钟极速部署!Billion Mail容器化方案助力邮件营销升级 🚀 【免费下载链接】BillionMail Billion Mail is a future open-source email marketing platform designed to help businesses and individuals manage their email campaigns with ease 项目…...