使用3ds Max粒子系统创建飞天箭雨特效场景
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景
1. 设置箭头
步骤 1
打开 3ds Max。
打开 3ds Max
步骤 2
我使用多边形建模技术制作了一个简单的箭头,我将 在教程中使用。.max您可以从 下载部分。
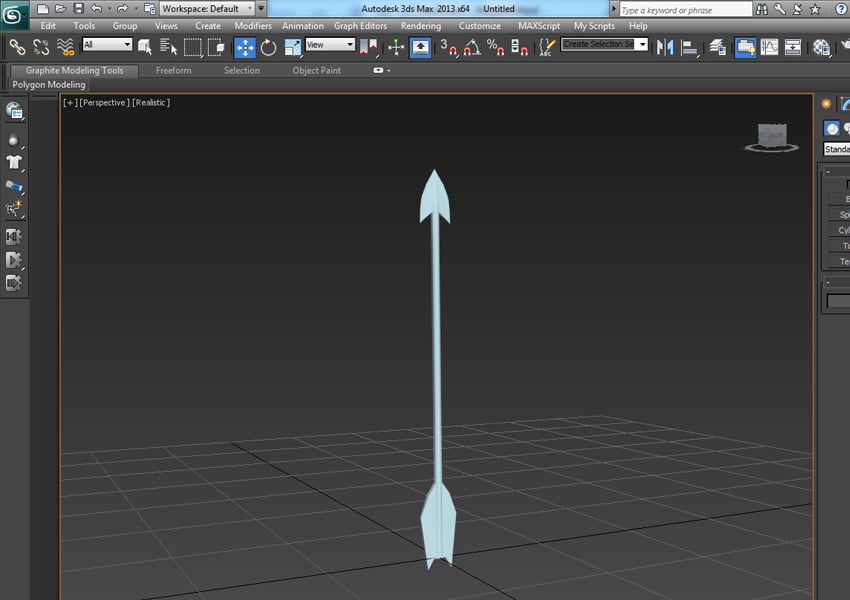
箭头.max
步骤 3
将此箭头重命名为静态箭头。
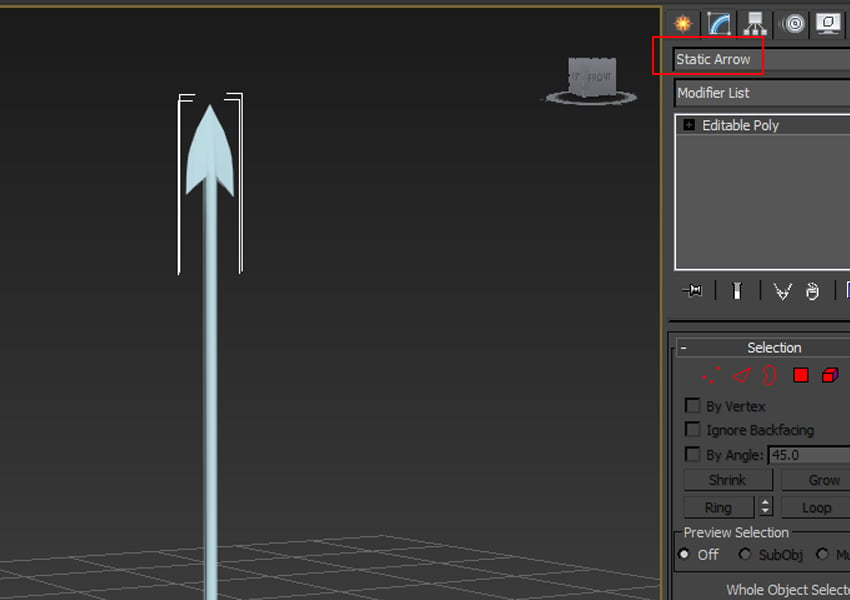
静态箭头
步骤 4
复制静态箭头。将复制的箭头重命名为动态 箭头。
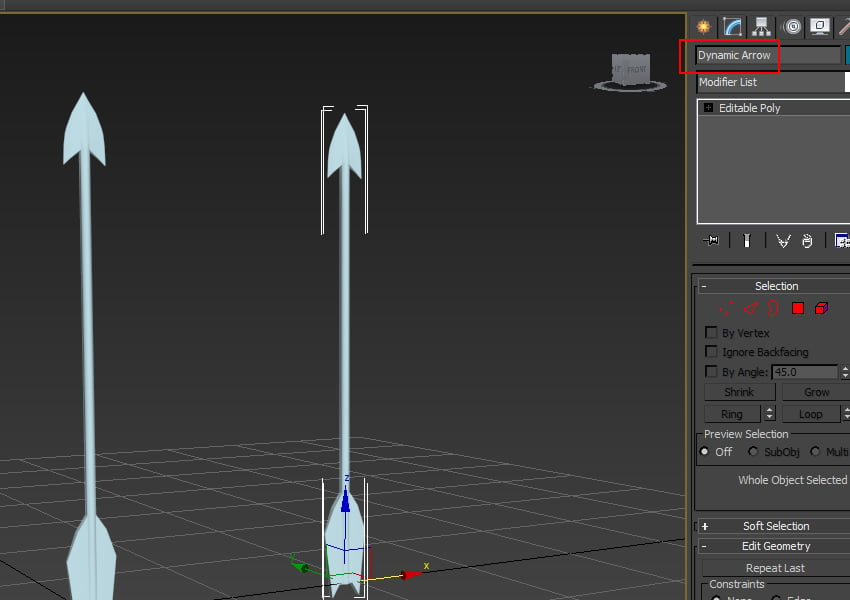
动态箭头
步骤 5
将“弯曲”修改器应用于动态箭头。拖动小控件 a 位向上,然后将角度参数的值动画化,直到 15 帧 让它的尾巴摆动。
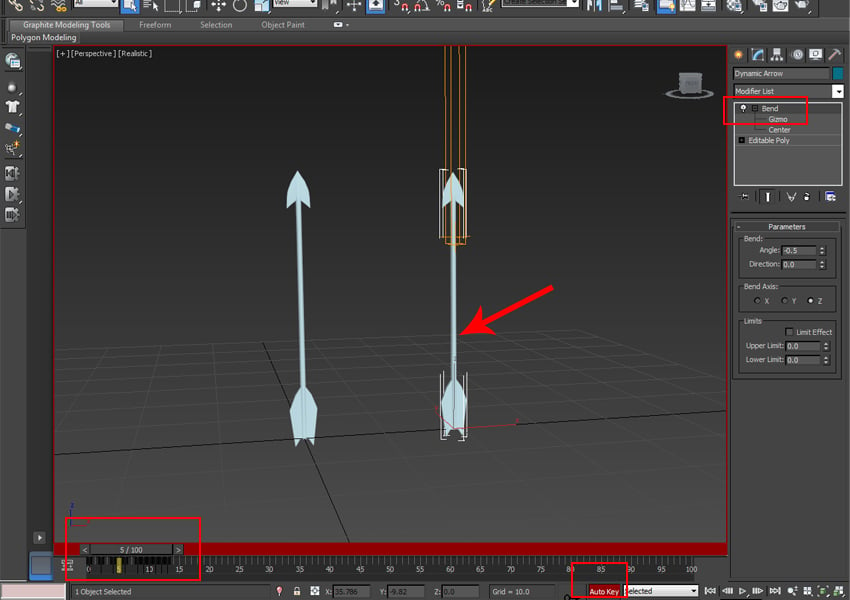
弯曲修改器
步骤 6
至少再复制两个动态箭头。您可以有多个 箭头的摆动时间略有不同,因为它会给你 随机性的影响。
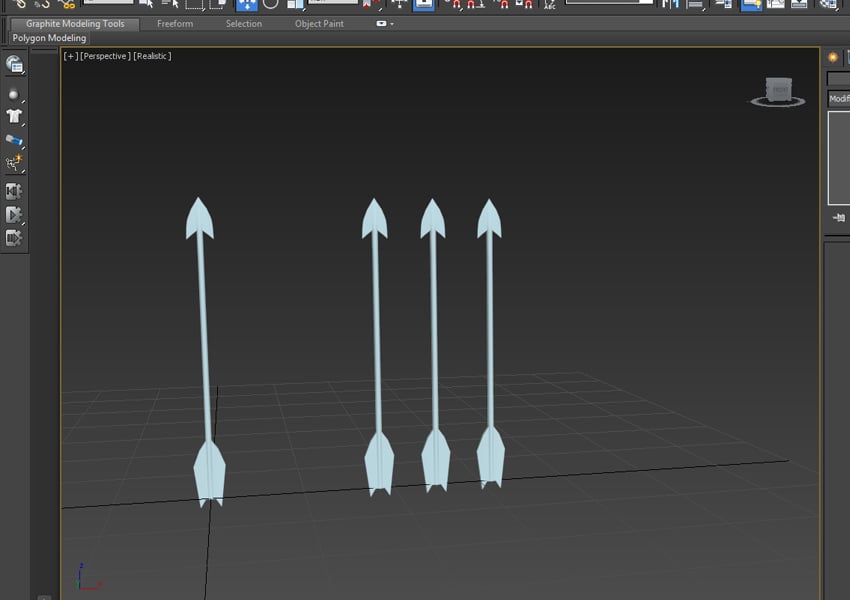
至少再复制两个动态箭头
步骤 7
选中所有三个动态箭头后,转到“组”菜单并创建 新组作为动态箭头组。
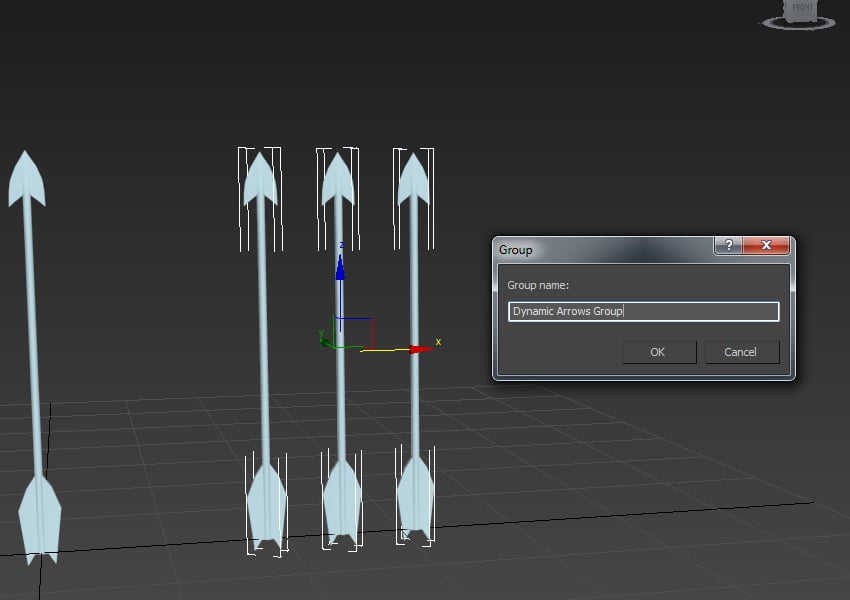
Dynamic Arrows Group
2. 设置粒子流系统
步骤 1
我准备了一个非常简单的场景设置,带有接地平面和盒子 在飞机上。目的是显示来自左侧的箭头和 穿透地面和墙壁。
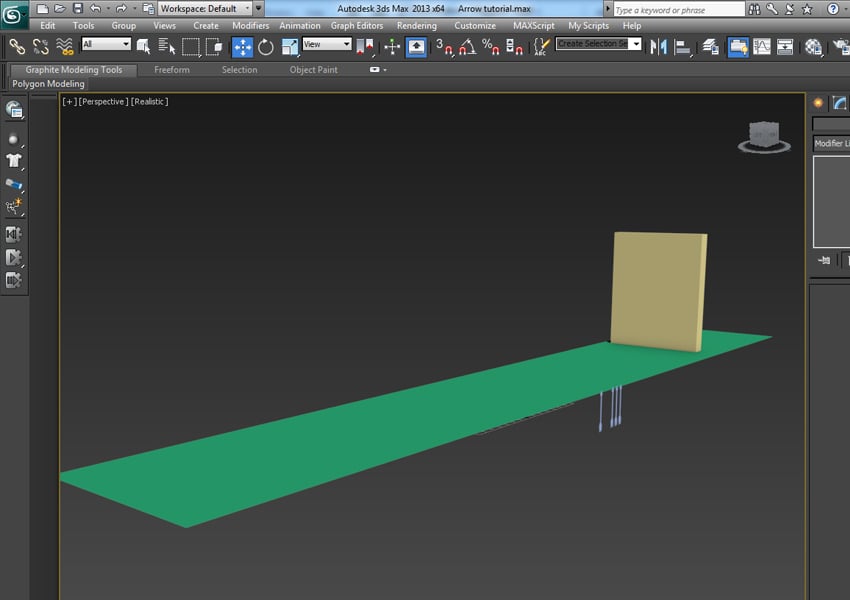
简单的场景设置
步骤 2
转到创建>粒子>粒子流源并创建粒子 视口中的流图标。
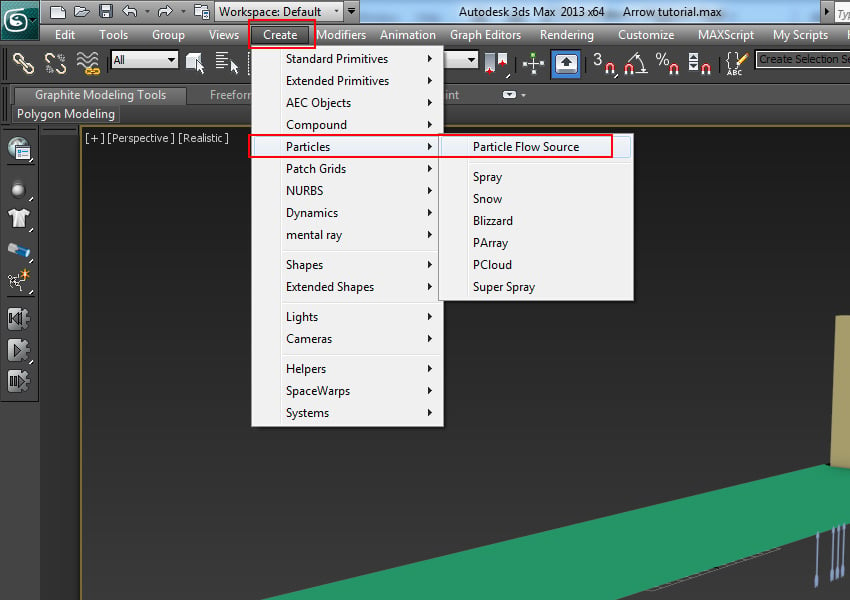
创建>粒子>粒子流源
步骤 3
在地平面的左端创建 PF 源图标。旋转 图标以 45 度角朝向盒子拍摄粒子。
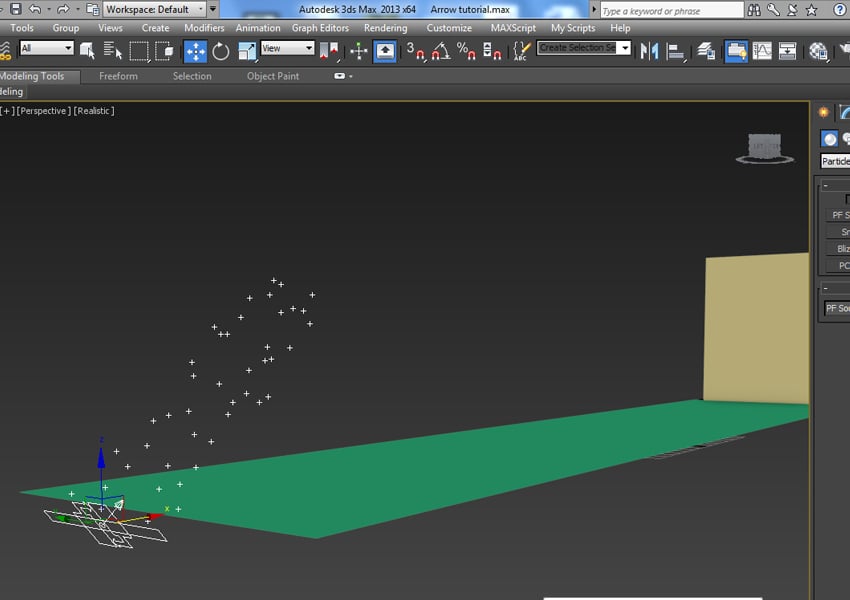
创建 PF 源图标
步骤 4
按键盘上的 6 键打开粒子视图窗口。
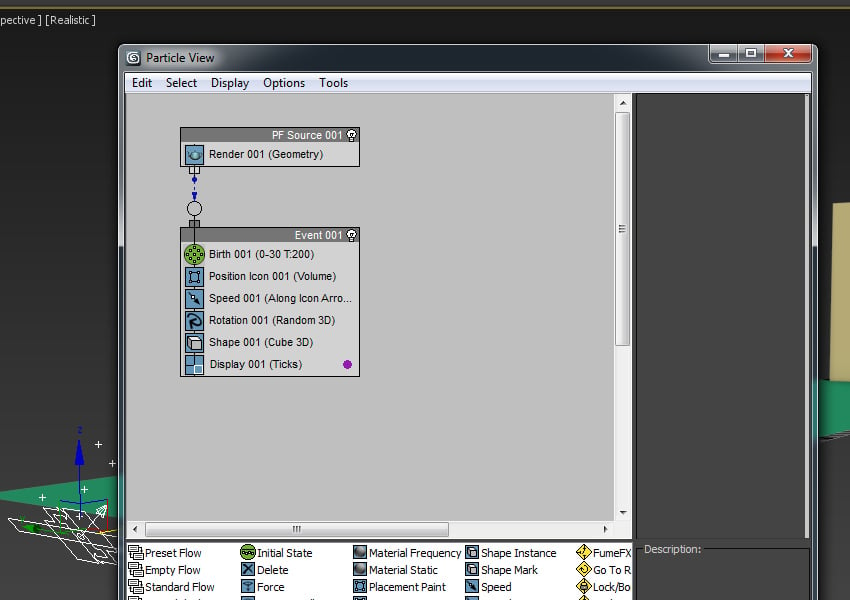
粒子视图窗口
步骤 5
单击出生运算符。将“发射开始”的值设置为 0,将“发出停止”的值设置为 60,将“数量”设置为 25。
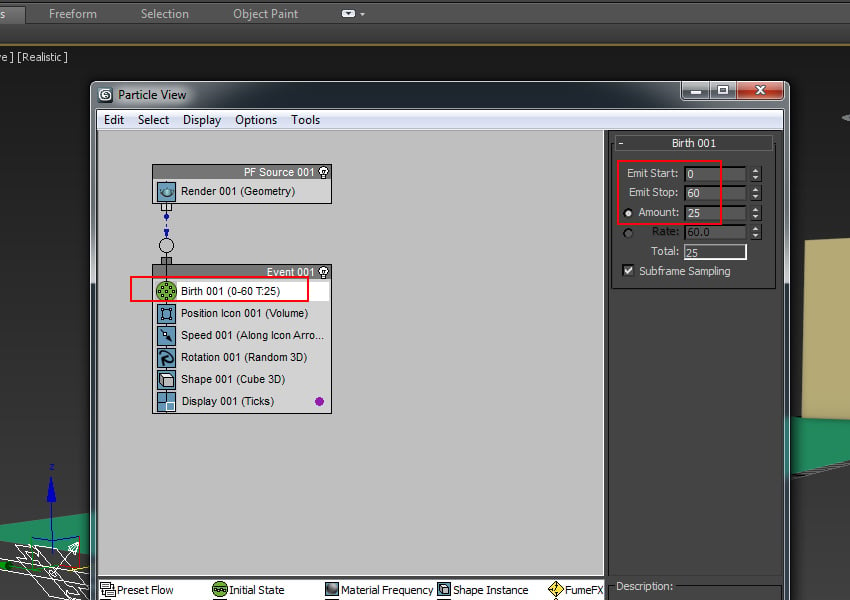
分娩操作员
步骤 6
删除形状运算符,取而代之的是将形状实例运算符引入事件。选择静态箭头网格作为粒子 几何对象。
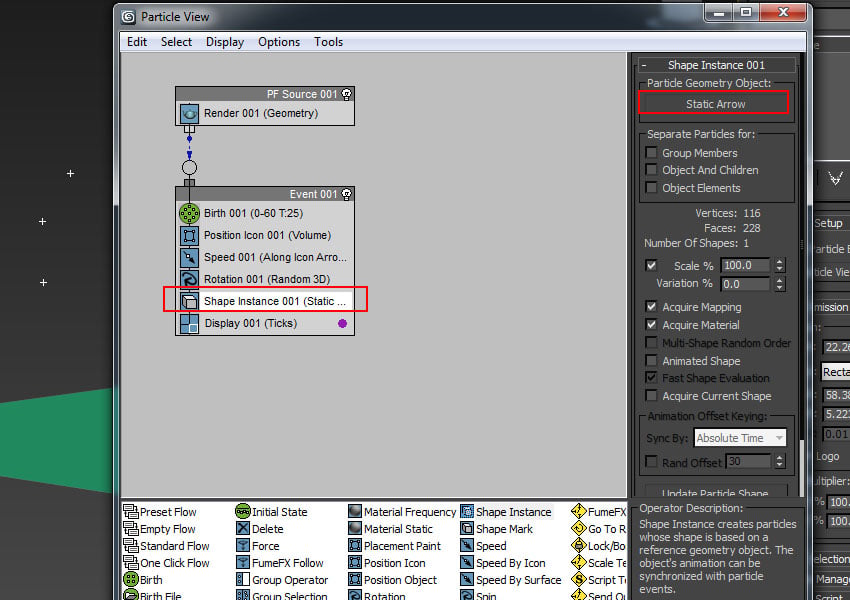
形状实例
步骤 7
转到显示运算符并选择几何图形作为类型选项。现在你可以看到粒子刻度已经变成了箭头 视窗。但是箭头是随机出来的,没有任何特定的 方向轴。

显示运算符
步骤 8
要迫使箭头向特定和正确的方向飞行,请携带 事件中的另一个旋转运算符。将方向矩阵模式更改为速度空间跟随并将 Y 轴设置为 90 度。
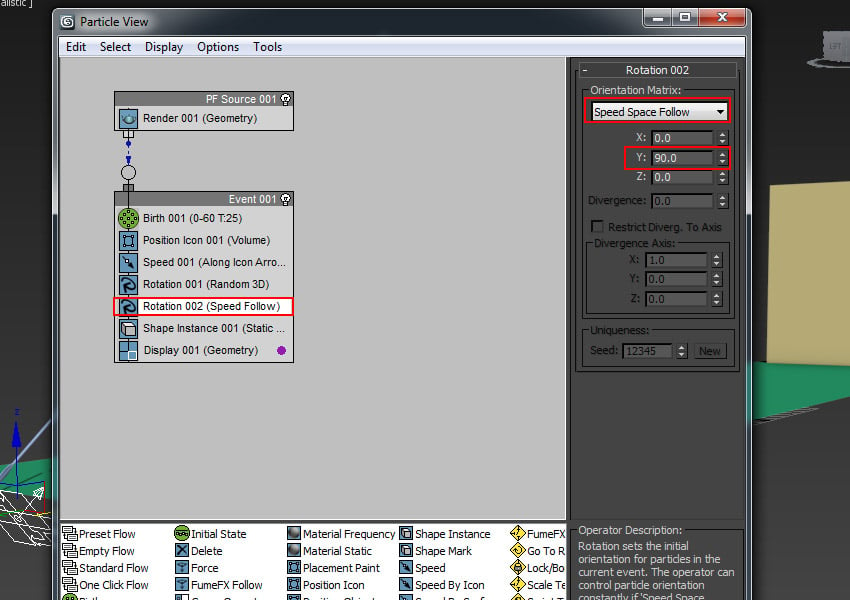
方向矩阵
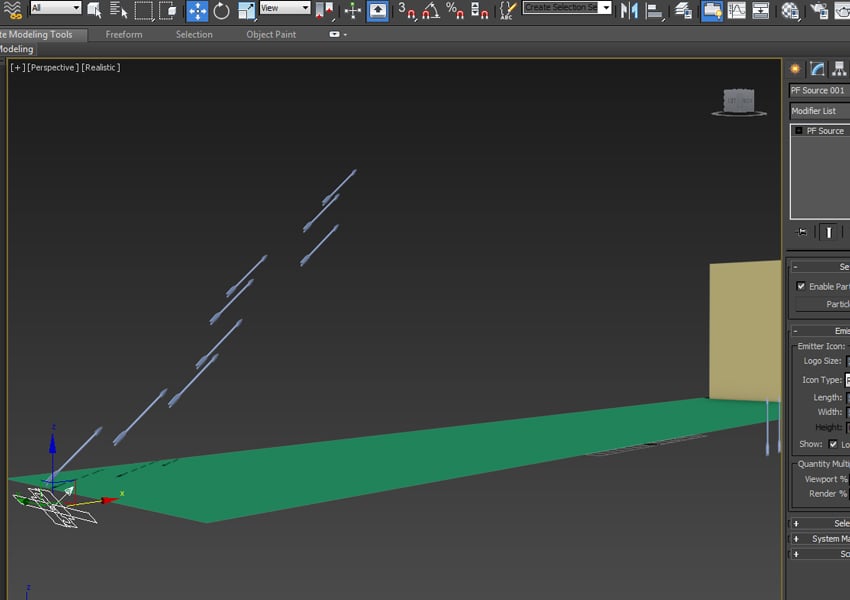
步骤 9
现在你可以看到箭头正朝着正确的方向前进。
箭头的方向
步骤 10
转到空间扭曲>重力>并在视口中创建重力图标。
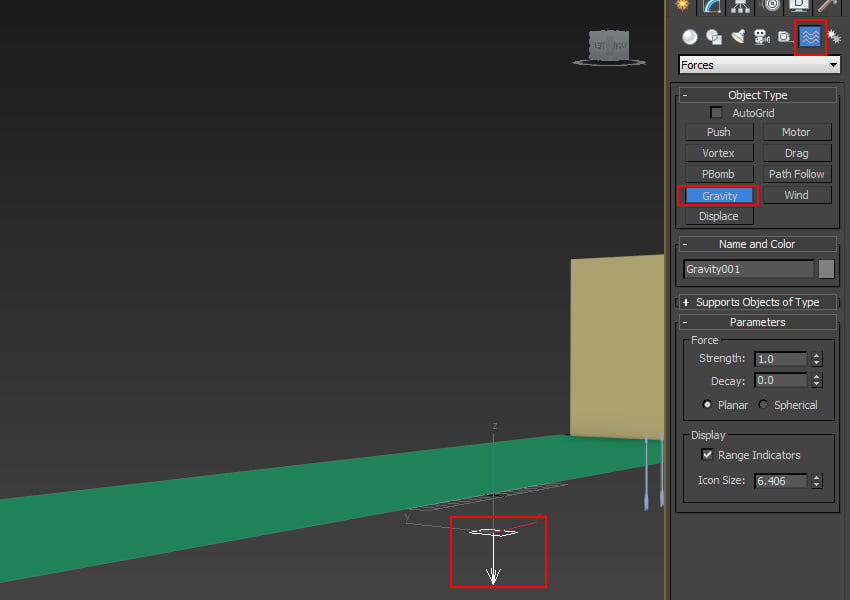
空间扭曲>重力>力
步骤 11
在事件中插入力运算符。在力中添加重力 空间扭曲列表。由于影响 重力,箭头的粒子向地面弯曲。
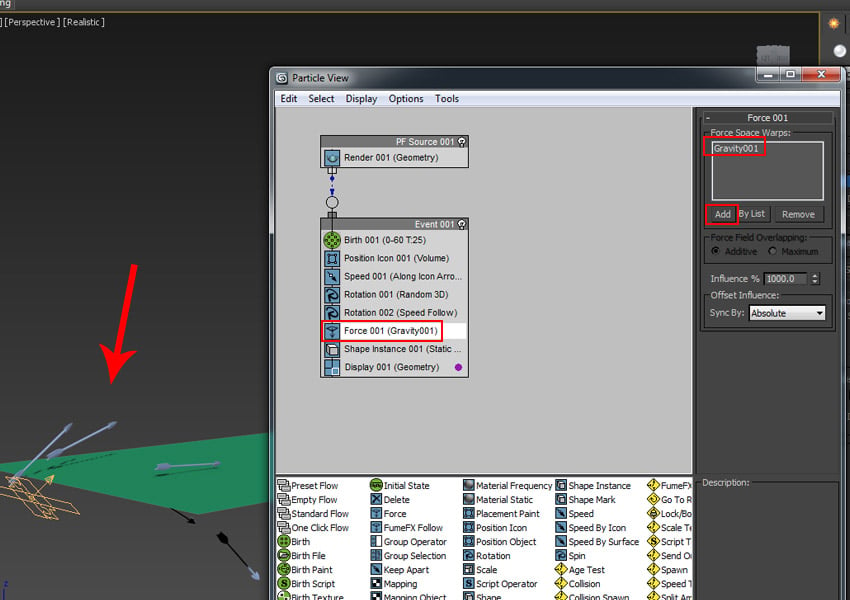
力操作员
步骤 12
更改“速度”和“变化”的值,以便箭头 可能会掉在盒子上。您必须使用速度运算符的这些值才能获得所需的结果。
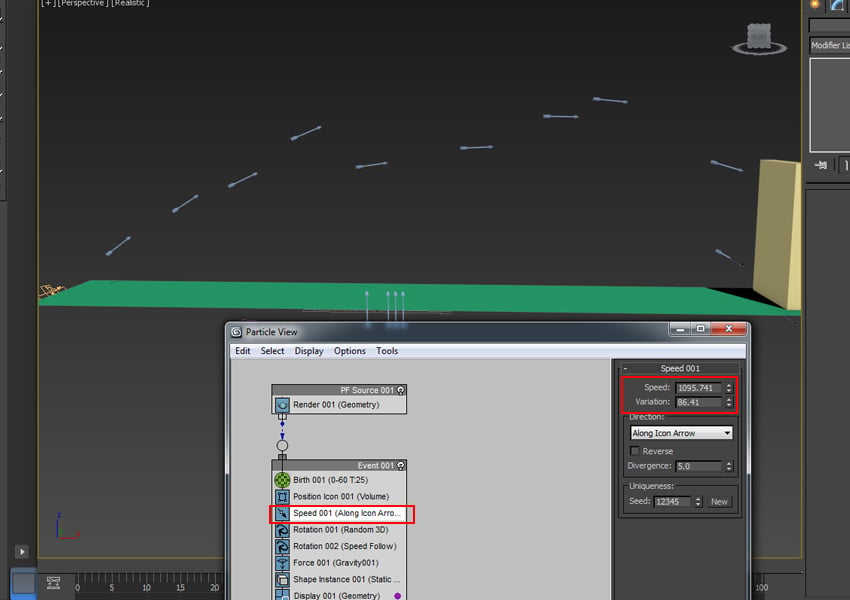
速度操作员
步骤 13
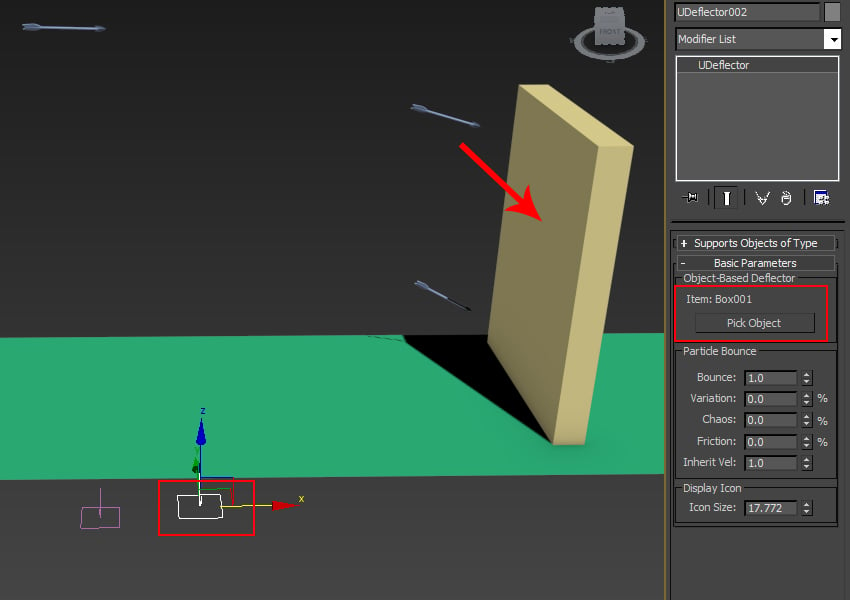
转到空间扭曲>偏转器>UDeflector并创建两个 视口中 UDeflector 的图标。
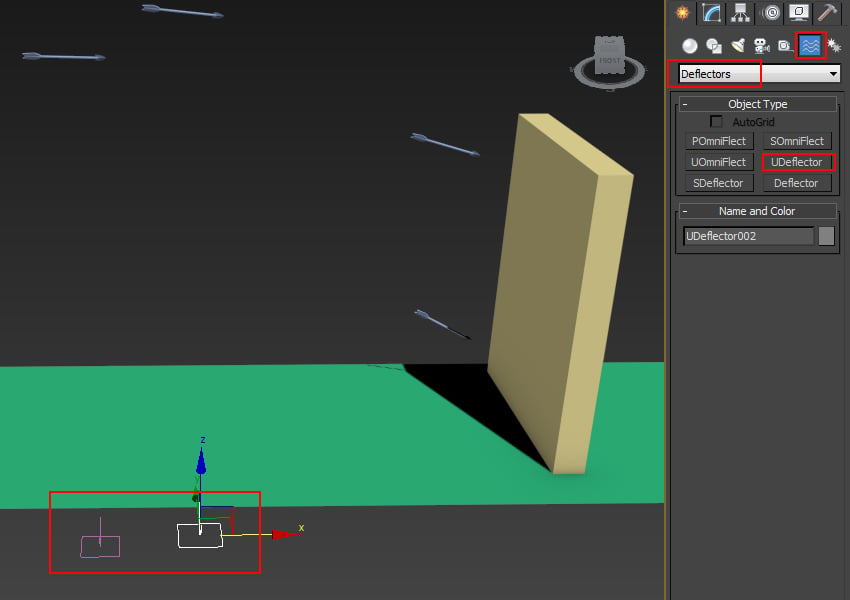
空间扭曲 > 导流板>导流板
步骤 14
选中第一个 UDeflector 图标后,单击“拾取对象”和 选择地平面网格以使其成为偏转器。
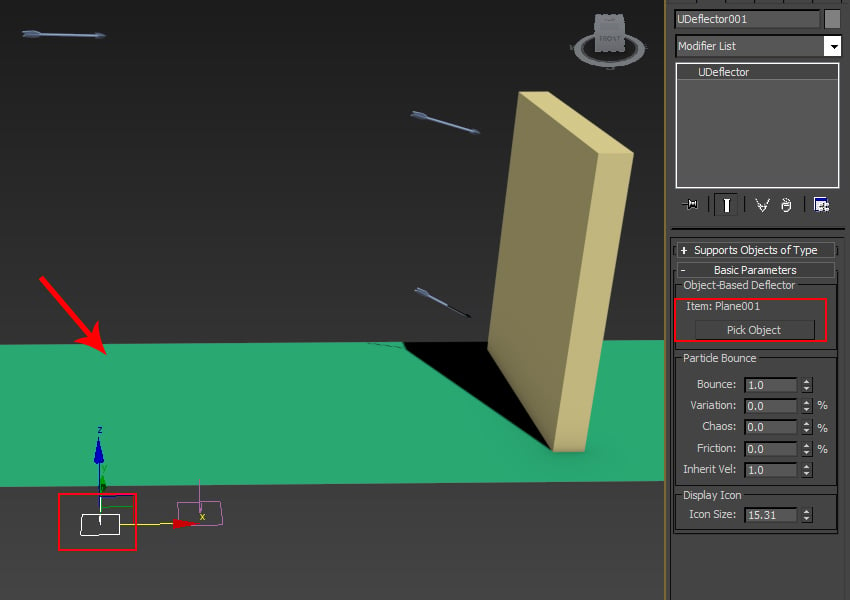
拾取对象
步骤 15
按照同样的方式,选择第二个 UDeflector 并单击“选择” 对象以选择盒子网格以使其也作为偏转器。
拾取对象
步骤 16
插入事件中的碰撞测试。在列表中添加两个 UDeflector ,并将速度设置为继续。这将允许箭头 即使在与地面和墙壁碰撞后仍继续。
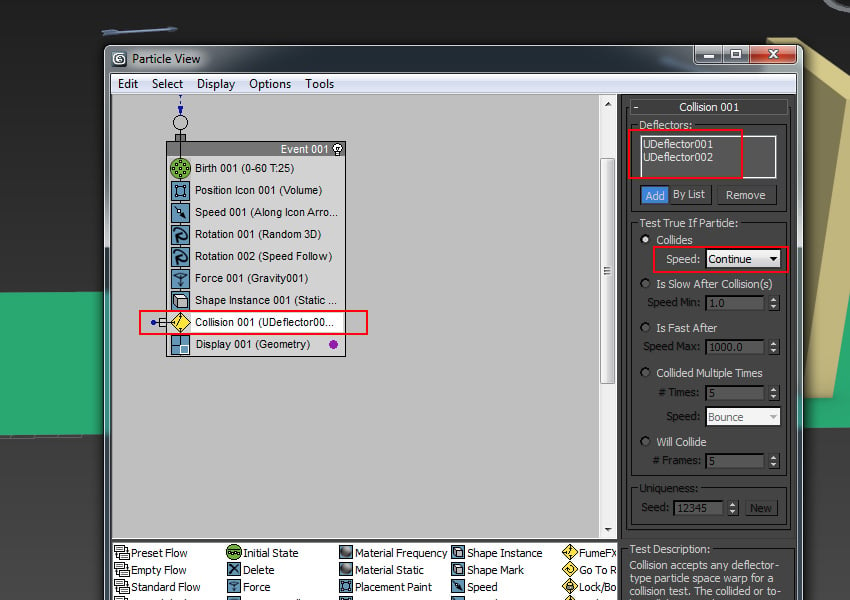
碰撞试验
步骤 17
创建另一个事件,首先插入形状实例运算符 在其中。将碰撞测试字符串连接到此新创建的事件。
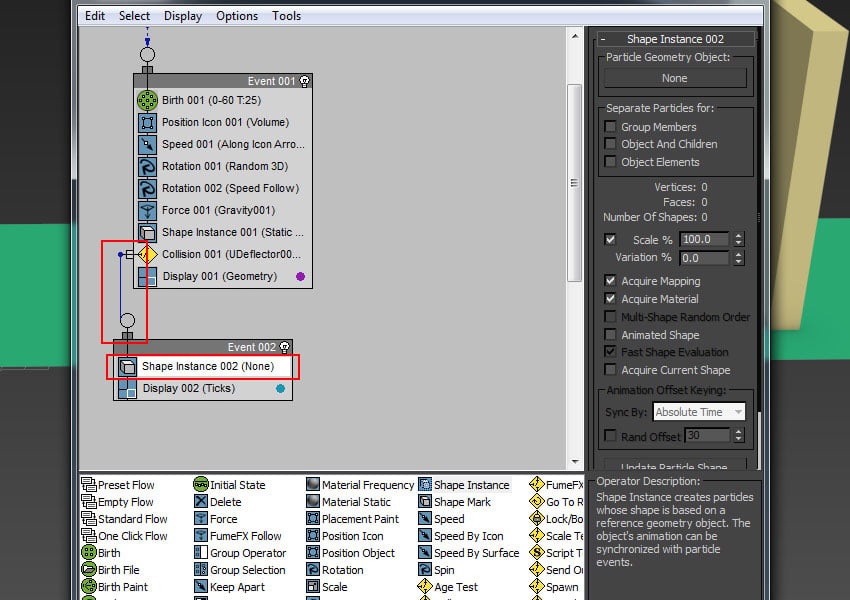
形状实例
步骤 18
选择“动态箭头组”作为实例化几何图形。
开启群组 “成员”、“对象和子项”和“对象元素”选项。
打开 动画形状 选项以及因为动态箭头具有 动画。
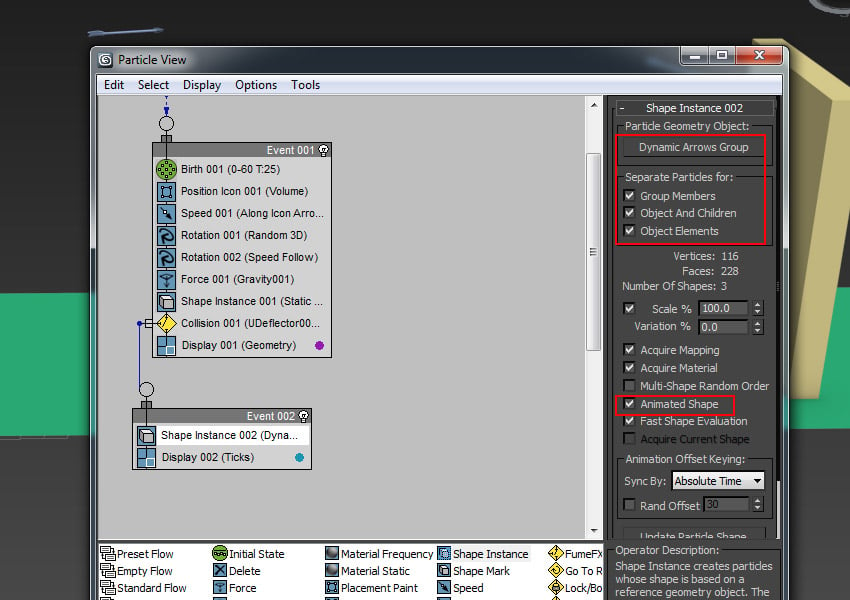
动态箭头组
步骤 19
转到显示运算符并选择几何图形作为类型选项。
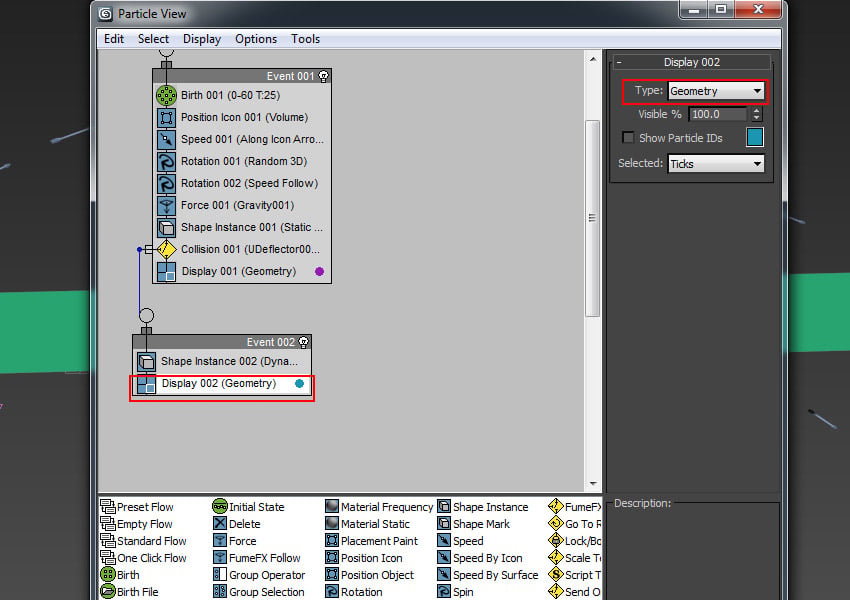
显示运算符
步骤 20
您可以看到箭头在碰撞后仍然穿过 障碍。因此,您需要在此处施加一个力,该力可以在之后停止箭头 渗透。
转到空间扭曲>力>拖动并创建一个 图标 在视口中拖动。设置 的线性阻尼值 每个轴为 45。
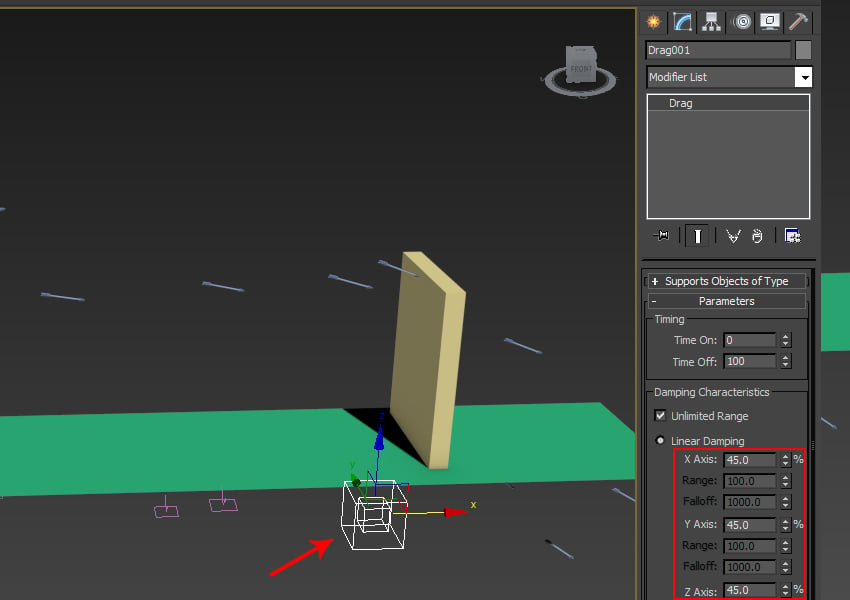
空间扭曲>力量>阻力
步骤 21
在第二个事件中插入力运算符。在力中添加拖动 空间扭曲列表。设置影响力 值为 3000。
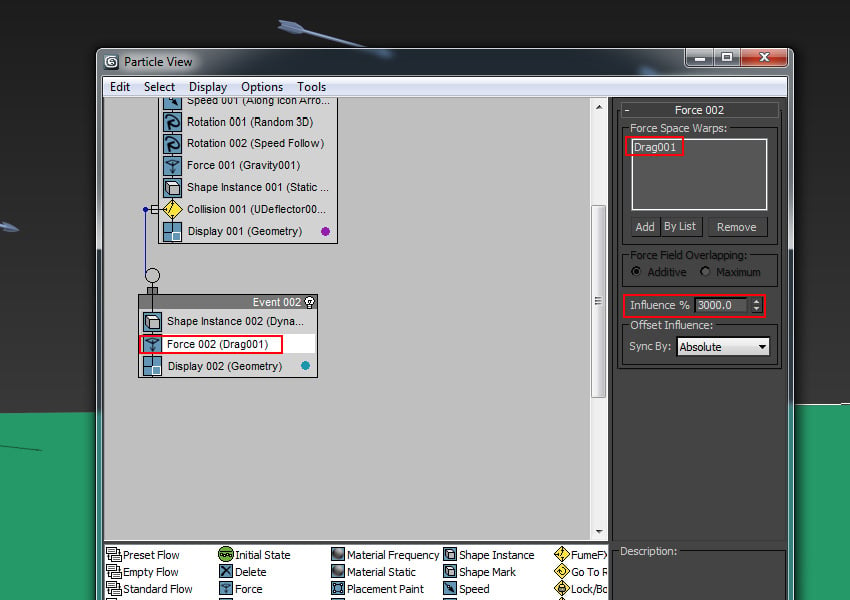
力操作员
步骤 22
现在您可以看到箭头在穿透后停止。
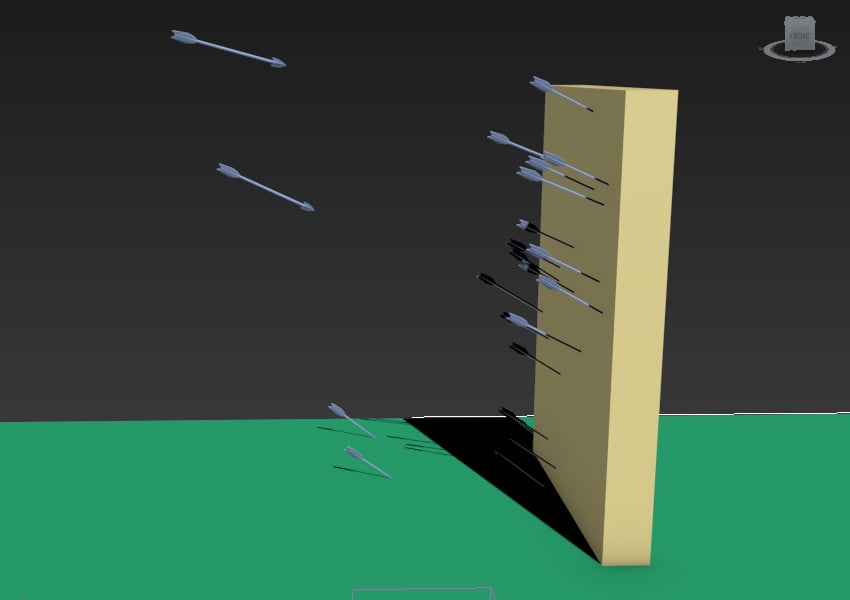
渗透
步骤 23
影响力值非常重要。如果减小此值, 穿透的箭头会穿透得更深,如果你增加这个值 箭头的穿透深度较小。
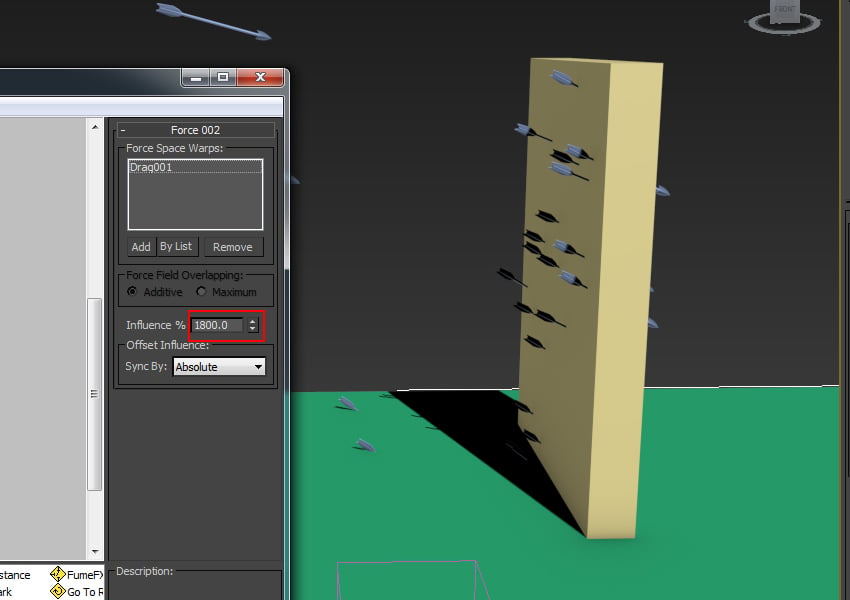
影响价值
步骤 24
播放动画,你会看到壮观的箭雨穿透 墙壁和地面。
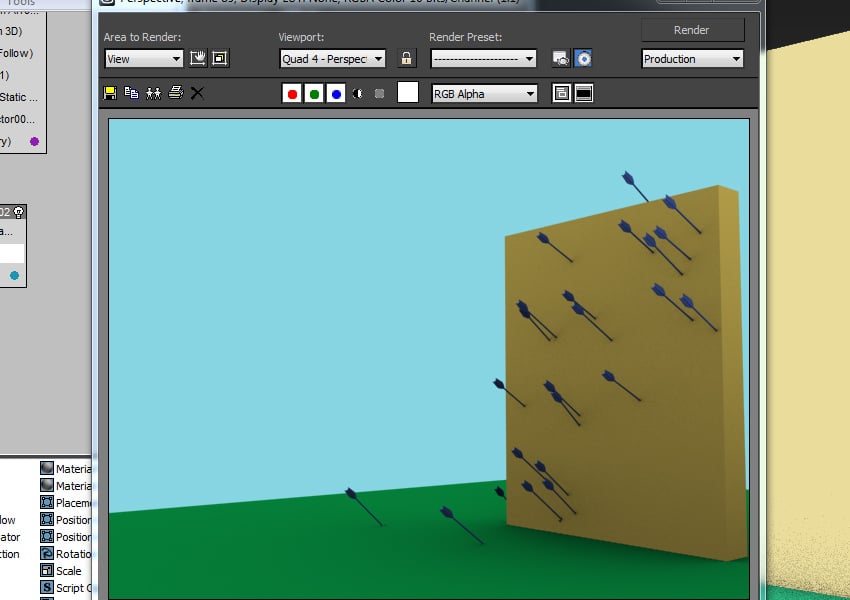
最后一幕
结论
粒子流是 3ds Max 中强大的粒子系统。你可以用粒子流做出巨大的效果。我将带来更多关于粒子流不同方面的令人兴奋的教程。
原文链接:使用3ds Max粒子系统创建飞天箭雨特效场景 (mvrlink.com)
相关文章:
使用3ds Max粒子系统创建飞天箭雨特效场景
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. 设置箭头 步骤 1 打开 3ds Max。 打开 3ds Max 步骤 2 我使用多边形建模技术制作了一个简单的箭头,我将 在教程中使用。.max您可以从 下载部分。 箭头.max 步骤 3 将此箭头重命名为静态…...

【朴素贝叶斯实例】
朴素贝叶斯对新闻进行分类 朴素贝叶斯算法是一种常用的文本分类方法,特别适用于自然语言处理任务,如新闻分类。在这篇博客中,我们将使用Python的scikit-learn库来实现朴素贝叶斯算法,并将其应用于新闻分类任务。 数据准备 首先…...

MPAS跨尺度、可变分辨率模式
跨尺度预测模式(The Model for Prediction Across Scales - MPAS)是由洛斯阿拉莫斯实验室和美国国家大气研究中心(NCAR)共同开发,其由3个部分组成,分别称为 MPAS-A(大气模型)、MPAS-O(海洋模型&…...

微信小程序对接SSE接口记录
微信小程序对接SSE接口记录 需求:公司项目对接gpt,gpt产生的结果是分段返回,所以要求在产生结果时,有打字机的效果。原本是由定时器调用,后来优化改为服务端使用SSE接口。小程序使用起来比较方便,但是要求…...
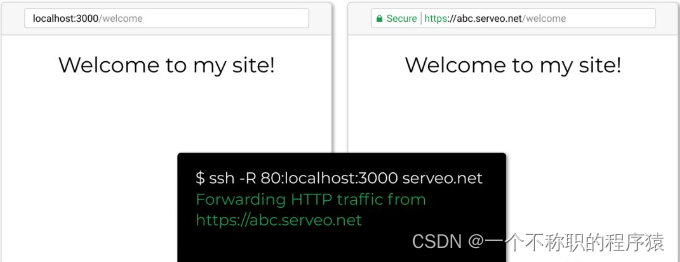
Ngrok 的绝佳替代品,内网穿透神器 Serveo
什么是 Serveo Serveo 是一个免费的内网穿透服务,Serveo 可以将本地计算机暴露在互联网上,官方声称其为 Ngrok 的绝佳替代品。 Serveo 其最大优点是使用现有的 SSH 客户端,无需安装任何客户端软件即可完成端口转发。 Serveo 工作原理很简单…...
网络知识点之-路由
路由(routing)是指分组从源到目的地时,决定端到端路径的网络范围的进程。路由工作在OSI参考模型第三层——网络层的数据包转发设备。路由器通过转发数据包来实现网络互连。虽然路由器可以支持多种协议(如TCP/IP、IPX/SPX、AppleTa…...
input 框如何移动光标,设置光标位置?
获取 input 光标位置 const inputDom document.getElementById("input") const selectionStart inputDom.selectionStart设置 input 光标 inputDom.focus() // focus() 异步,所以加了 setTimeout setTimeout(() > {const nextSelection selection…...
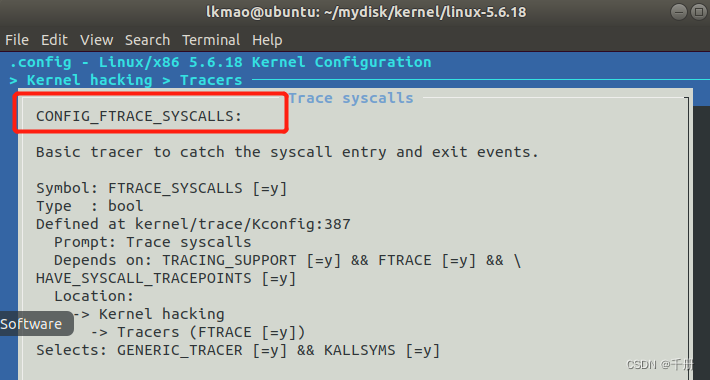
linux内核系统调用学习5:SYSCALL_DEFINE<0-6>
系统调用最大参数是6,由下面这个宏定义,位于文件include\linux\syscalls.h #define SYSCALL_DEFINE_MAXARGS 6 SYSCALL_DEFINE0(fork) fork:系统调用名。 SYSCALL_DEFINE1(set_tid_address, int __user *, tidptr) set_tid_address&#x…...
)
maven镜像仓库配置(多镜像自动切换)
大家在使用IDEA的时候会遇到这样的一个问题,就是在下载源代码和资源文档的时候,有些镜像仓库里面没有源代码和资源文档,然后会导致下载失败。 这时候就需要多个镜像仓库的地址了。 附上我自己的配置文件: <mirrors><!--…...

ChatGPT在智能监控和安防系统中的应用如何?
ChatGPT在智能监控和安防系统中有着广泛的应用潜力。智能监控和安防系统是利用人工智能和计算机视觉技术来实现对环境的实时监控和安全保障的系统。ChatGPT作为一种通用的预训练语言模型,可以在智能监控和安防系统中发挥以下作用: 1. **智能视频监控**&…...
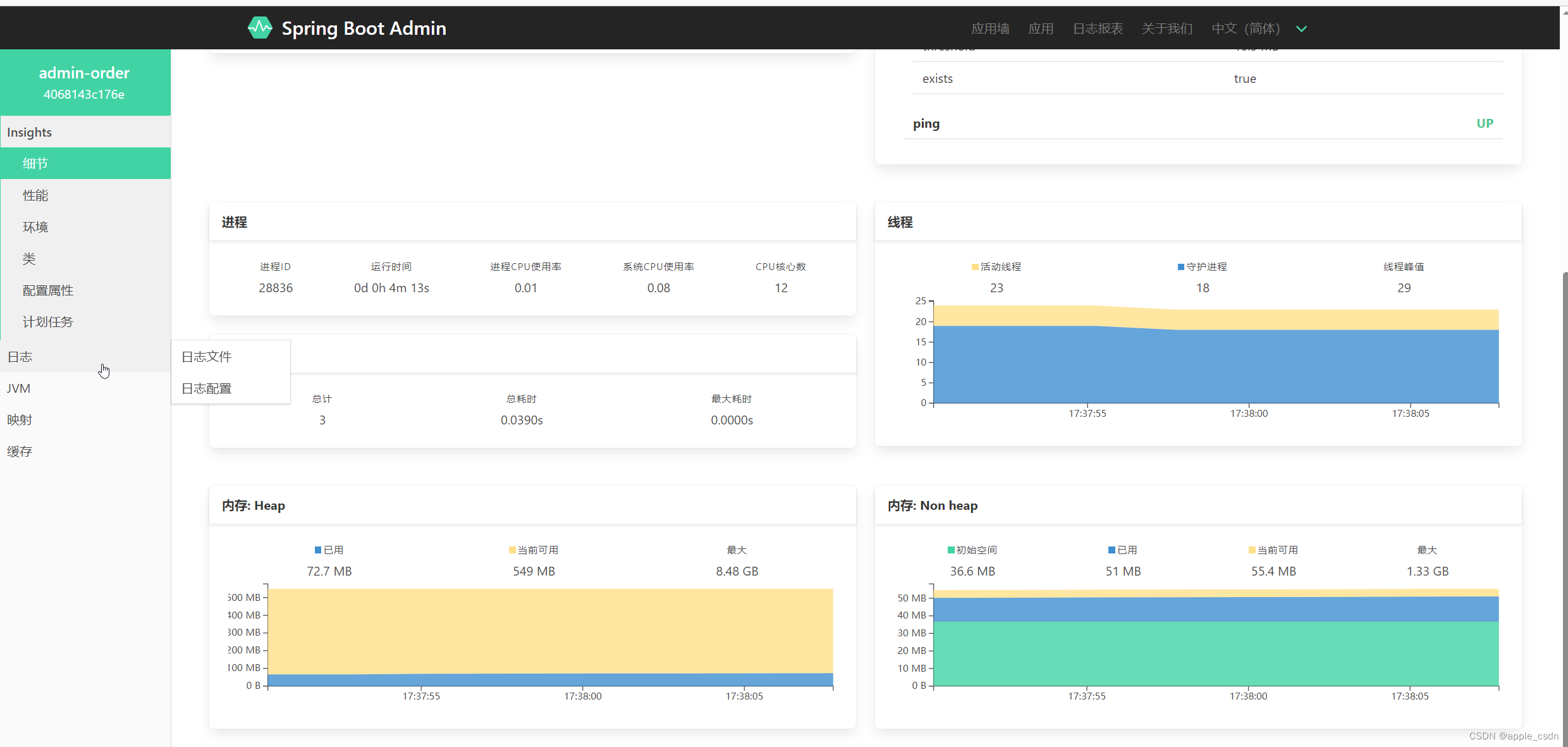
【Spring Boot Admin】介绍以及使用
介绍 概述 Spring Boot Admin是一个监控工具,旨在以一种漂亮且易于访问的方式可视化Spring Boot Actuators提供的信息。 主要功能点 显示应用程序的监控状态应用程序上下线监控查看 JVM,线程信息可视化的查看日志以及下载日志文件动态切换日志级别Http…...
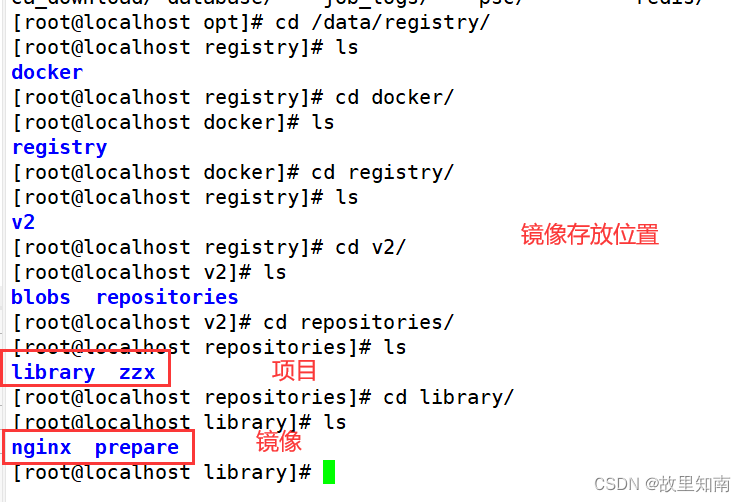
本地私有仓库部署、docker--harbor私有仓库部署和管理
部署本地私有仓库 拉取镜像 修改daemon.json配置文件 重启docker服务 创建容器 为镜像打标签 上传镜像 查看私有仓库 其他主机拉取私有仓库镜像 Docker--harbor私有仓库 (1)什么是Harbor Harbor 是 VMware 公司开源的企业级 Docker Registry 项目…...

java根据模板导出word
java根据模板导出word 日常开发中,常常会遇到各种各样的表格进行导出,比较好的办法就是提前弄好word模版,再通过遍历的方式进行导出文档 1、制作word模版 模版编写 内容替换 目标下面模版进行多页展示 将word转换成xml 将xml格式化 再将x…...

spring学习笔记十四
注解开发Bean总结 功能 xml配置注解定义Bean bean标签 id属性class属性 Component ControllerServiceRepositorComponentScan 设置依赖注入 setter注入(set方法) 引用类型/简单类型构造器注入 引用类型和简单类型自动装配 Autowired QualifierValue 配置第三方Bean be…...

【springmvc部分功能源码仿写第一步】实现java对目录下所有文件的遍历
废话不多说,直接上源码! public class MiniSpring {public static void main(String[] args) {String path "D:\\ideaProject\\thread";File file new File(path);List<String> list new ArrayList<>();System.out.println(fi…...

SpringBoot中接口幂等性实现方案-自定义注解+Redis+拦截器实现防止订单重复提交
场景 SpringBootRedis自定义注解实现接口防刷(限制不同接口单位时间内最大请求次数): SpringBootRedis自定义注解实现接口防刷(限制不同接口单位时间内最大请求次数)_redis防刷_霸道流氓气质的博客-CSDN博客 以下接口幂等性的实现方式与上面博客类似,…...

论文解读|用于从RGB-D数据进行3D物体检测的Frustum PointNets
原创 | 文 BFT机器人 01 摘要 论文研究了室内和室外场景中基于RGBD数据的3D目标检测。论文的方法不仅仅依赖于3D方案,而是利用成熟的2D对象检测器和先进的3D深度学习进行对象定位,即使是小对象也能实现高效率和高召回。 直接在原始点云中学习࿰…...
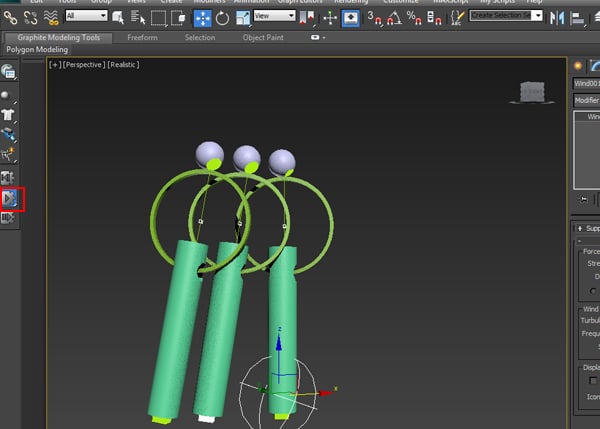
3ds Max图文教程: 使用动态工具Mass FX 创建风铃动画
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. 简单的场景设置 步骤 1 打开 3ds Max。 打开 3ds Max 步骤 2 我将向您展示风铃背后的动态 通过简单的场景设置进行模拟。一旦你有了这个想法,你就可以应用这个 技术到复杂的风铃结构。 基…...

抖音矩阵系统源码开发搭建部署分享
一、 功能开发设计 (1)数据概览:账号,视频top10数据统计 (2)AI视频创意:原创视频批量剪辑,阶乘算法,去重原理 (3)同城拓客:线下门店…...
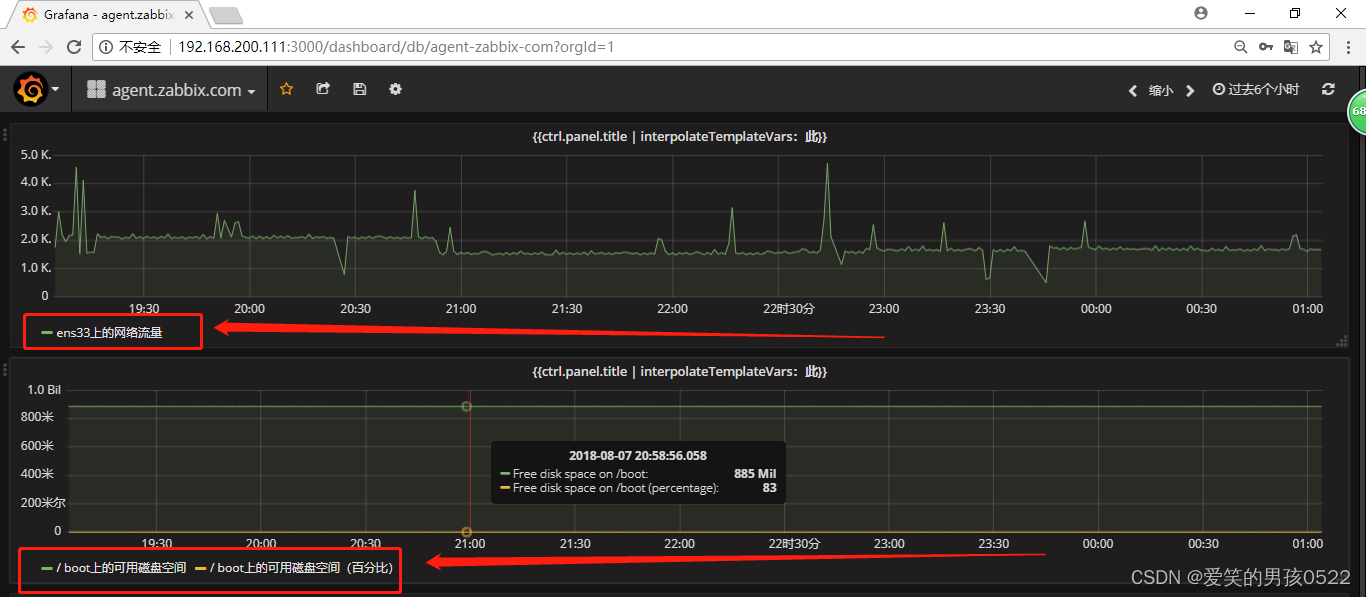
Grafana图形web监控的安装与配置
目录 一、安装并配置 二、Web访问 三、Grafana启用zabbix插件 四、Grafana添加zabbix数据源 五、创建仪表盘 创建监控项完成保存仪表盘 六、查看创建的仪表盘 七、在现有的dashboard(仪表盘)中添加图形 八、查看最终dashborad(仪表盘&#x…...

Minecraft世界优化终极指南:5分钟掌握免费区块管理神器
Minecraft世界优化终极指南:5分钟掌握免费区块管理神器 【免费下载链接】mcaselector A tool to select chunks from Minecraft worlds for deletion or export. 项目地址: https://gitcode.com/gh_mirrors/mc/mcaselector 你是否曾为Minecraft世界无限膨胀而…...

私域团队如何用企业微信 API 提升客户维护效率?
一、 场景描述:为什么你的团队每天都在“瞎忙”? 很多私域团队看似忙碌,实则效率低下。典型的现象包括: • 重复回答:每天 70% 的时间在复制粘贴相同的话术(如:发货时间、优惠券怎么领ÿ…...

Battle City碰撞检测算法:精准命中与躲避的核心技术解析
Battle City碰撞检测算法:精准命中与躲避的核心技术解析 【免费下载链接】battle-city 🎮 Battle city remake built with react. 项目地址: https://gitcode.com/gh_mirrors/ba/battle-city 在经典的Battle City坦克大战游戏中,碰撞检…...

哔哩下载姬DownKyi:你的B站视频下载与处理终极指南
哔哩下载姬DownKyi:你的B站视频下载与处理终极指南 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等ÿ…...

RedBox容器编排工具:在Docker与K8s间的轻量级生产实践
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫Jamailar/RedBox。乍一看这个名字,你可能会联想到一个红色的盒子,或者某种特定的工具。实际上,它确实是一个“盒子”,一个用于构建、管理和部署容器化应用的…...

铝板椭圆成像无线传输损伤检测【附仿真】
✨ 长期致力于兰姆波、虚拟时间反转、损伤成像、压电陶瓷研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)铝板Lamb波频散特性与压电陶瓷PZT优化&#…...

AD9361快速切频点秘籍:不用复杂计算,一张2400-2480MHz的查表配置表直接拿去用
AD9361射频芯片极速切频实战:2400-2480MHz预计算配置表与查表法优化 在Wi-Fi 6E和蓝牙5.3设备爆发式增长的今天,射频工程师每天需要处理数百次频段切换测试。传统AD9361配置流程中,每次切换频点都要重新计算VCO分频比、电荷泵电流等12个关键参…...

Python 爬虫进阶技巧:请求头 UA 随机伪装绕过基础检测
前言 当下绝大多数网站均部署了基础反爬检测机制,服务器会优先校验客户端请求身份标识,未携带合法浏览器标识、使用默认程序请求载体的爬虫请求,极易被直接拦截、封禁 IP、返回空数据或跳转拦截页面。爬虫默认发起请求时会自带程序原生 UA 标识,服务器可通过该标识直接识别…...

NoFences终极指南:免费开源桌面分区工具彻底解决Windows桌面混乱问题
NoFences终极指南:免费开源桌面分区工具彻底解决Windows桌面混乱问题 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为杂乱的Windows桌面而烦恼吗࿱…...

从矩阵求逆到元素倒数:用Matlab power函数处理数据时,90%的人会踩的坑
从矩阵求逆到元素倒数:用Matlab power函数处理数据时,90%的人会踩的坑 在科学计算和工程分析中,Matlab作为一款强大的工具被广泛应用。然而,许多用户在数据处理过程中常常陷入一个看似简单却影响深远的陷阱——混淆矩阵元素的倒数…...