嵌入式linux通用spi驱动之spidev使用总结
Linux内核集成了spidev驱动,提供了SPI设备的用户空间API。支持用于半双工通信的read和write访问接口以及用于全双工通信和I/O配置的ioctl接口。使用时,只需将SPI从设备的compatible属性值添加到spidev区动的spidev dt ids[]数组中,即可将该SPI从设备创建为spidev设备。如果不想编写单独的spi设备驱动,那么使用linux内核提供的通用spidev设备驱动就够了,它提供统一的字符设备操作,那么只需要在应用层读写和控制即可。
spidev驱动简介
spidev是一个Linux内核驱动,用于与SPI(串行外设接口)设备进行通信。SPI是一种全双工、同步的串行通信协议,常用于连接微控制器和外部设备。spidev驱动允许用户空间程序通过Linux的设备文件接口与SPI设备进行通信。用户可以通过打开和读写设备文件来发送和接收SPI数据。spidev驱动提供了一组控制IO口和SPI参数的ioctl命令。
同时Linux内核也集成了SPI测试工具spidev test,用于在用户态对spidev动功能进行测试和验证。
spidev设备驱动源码位置在:linux-imx-4.1.15\drivers\spi\spidev.c
驱动框架框图:
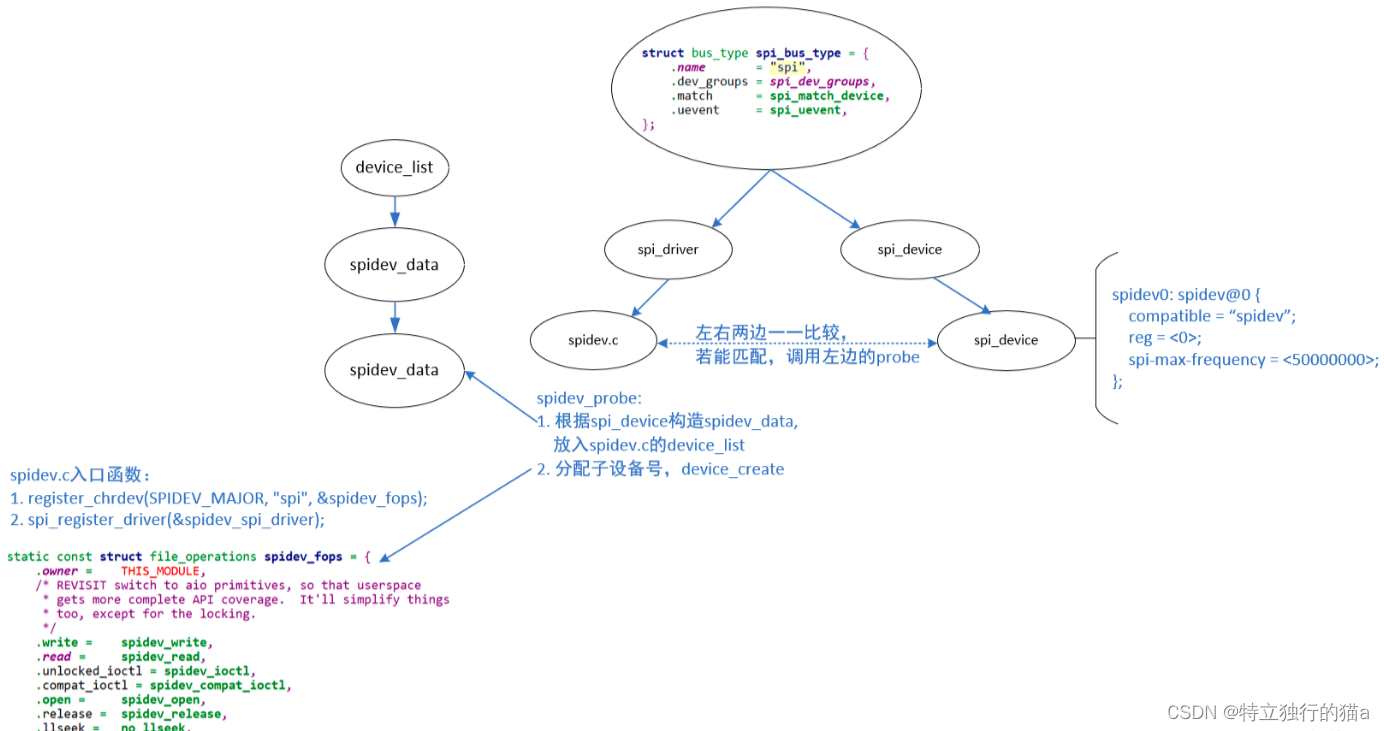
除了使用spidev驱动外,当然也可以自己编写SPI驱动。
使用现有的spidev驱动可以简化开发过程,因为它提供了一组用户空间接口,可以直接在应用程序中使用标准的文件操作函数(如open、read、write和ioctl)来操作SPI设备。这种方式适用于大多数应用场景,特别是对于简单的SPI设备操作,可以快速实现功能。
如果使用自己编写的SPI驱动也可以,也不算麻烦,需要在内核中实现SPI子系统,包括SPI控制器驱动和SPI设备驱动,最后根据需要实现个如字符型设备驱动操作接口,供上层应用使用即可。
应用层使用步骤
用户应用层使用spidev驱动的步骤如下:
1. 打开SPI设备文件:用户可以通过打开/dev/spidevX.Y文件来访问SPI设备,其中X是SPI控制器的编号,Y是SPI设备的编号。
2. 配置SPI参数:用户可以使用ioctl命令SPI_IOC_WR_MODE、SPI_IOC_WR_BITS_PER_WORD和SPI_IOC_WR_MAX_SPEED_HZ来设置SPI模式、数据位数和时钟速度等参数。
3. 发送和接收数据:用户可以使用read和write系统调用来发送和接收SPI数据。写入的数据将被传输到SPI设备,而从设备读取的数据将被存储在用户提供的缓冲区中。
4. 关闭SPI设备文件:当不再需要与SPI设备通信时,用户应该关闭SPI设备文件。
总结起来,spidev驱动提供了一种简单而灵活的方式来与SPI设备进行通信,使得用户可以轻松地在Linux系统上开发和控制SPI设备。
内核配置
使能spidev用户态驱动
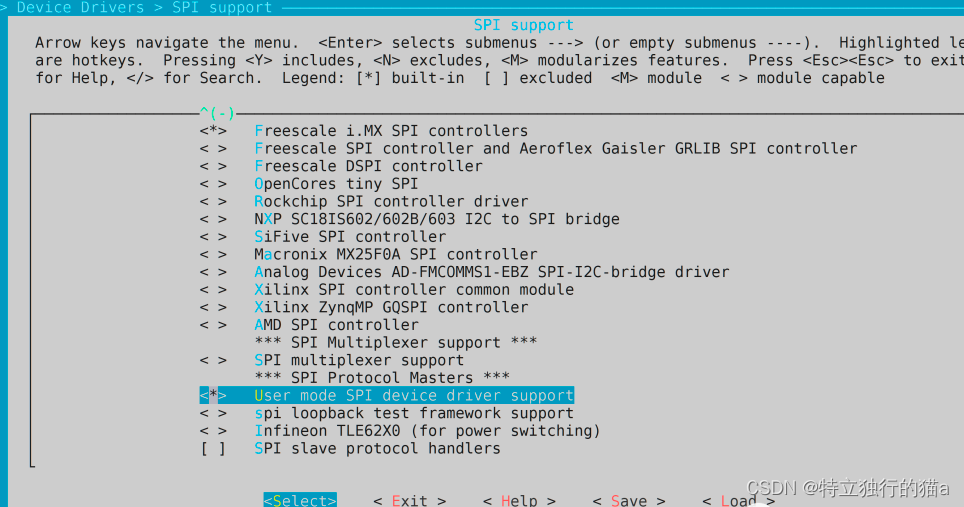
在生成的config文件中可以看到以下配置生效了。我的是在imx6ul开发板的imx_v7_defconfig的linux内核配置文件中。
CONFIG_SPI=y
CONFIG_SPI_GPIO=y
CONFIG_SPI_IMX=y
CONFIG_SPI_SPIDEV=y
编写设备树
&ecspi3 {fsl,spi-num-chipselects = <2>;/*cs管脚数配置*/cs-gpios = <0>,<&gpio1 20 GPIO_ACTIVE_LOW>;/*cs管脚配置*/pinctrl-names = "default";pinctrl-0 = <&pinctrl_ecspi3>;status = "okay";/* status属性值为"okay" 表示该节点使能*/spidev: icm20608@0 {compatible = "alientek,icm20608";spi-max-frequency = <8000000>;reg = <0>;/*spi设备是没有设备地址的, 这里是指使用spi控制器的cs-gpios里的第几个片选io */};oled: oledsh1106@1 {compatible = "yang,oledsh1106";/*重要,会匹配spidev.c中指定的compatible*/spi-cpol;/*配置spi信号模式*/spi-cpha;spi-max-frequency = < 8000000 >;/* 指定spi设备的最大工作时钟 */reg = <1>;};
};以上需要注意的是:如果该spi接口下挂载有多个从设备,需要设置fsl,spi-num-chipselects = <2>;默认该值为1。还有需要注意的地方是,cs-gpios 片选信号需要配置对应的个数。以上的为配置了两路片选GPIO管脚,第一个默认的,第二个是指定的。如果仅有一个从设备,可以配置cs-gpio就行了。注意cs-gpio和cs-gpios的区别,带s的标识可以有多个。
如果忽略cs管脚数配置,则会出现以下错误:
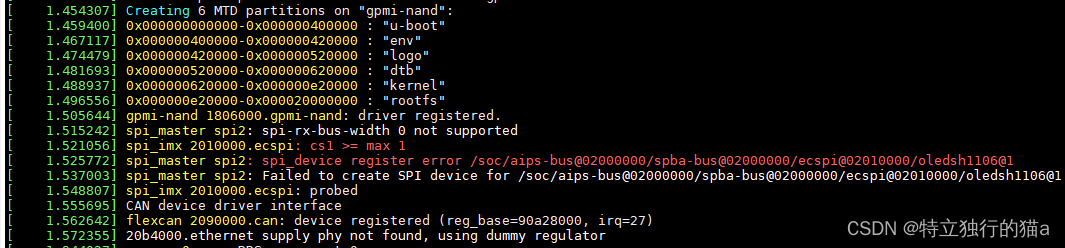
需要设置fsl,spi-num-chipselects = <2>;
注意上面的compatible 属性,在新版linux内核,可以写任意的字符串,最好不再写”spidev”,老版的是要写成”spidev”。给出的理由是: spidev should never be referenced in DT without a specific compatible string, it is a Linux implementation thing rather than a description of the hardware。
此外还有一些额外配置,以下为自定义属性,用于指定工作时序方式及其它功能设置等。如CPOL需要设1, 则只需在spi设备节点里加上"spi-cpol"属性即可; CPOL设0,则不写"spi-cpol"属性即可 。
buswidth = <8>; /* 传输以8位为单位 */
mode = <0>; /* 使用第几种工作时序(CPOL, CPHA) */
/*但在现用的内核源码里发现, spi设备的工作时序并不是用mode属性值来指定的*/
/* 如CPOL需要设1, 则只需在spi设备节点里加上"spi-cpol"属性即可; CPOL设0,则不写"spi-cpol"属性即可 */
/* CPHA设1时,则在设备节点里加上"spi-cpha"属性即可 */ pinctrl的配置
pinctrl_ecspi3: ecspi3grp {fsl,pins = <MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x100b1 /* MISO*/MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x100b1 /* MOSI*/MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x100b1 /* CLK*/MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x100b0 /* CS*/>;};编译内核和设备树
#加载环境
source /opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
#编译内核
make zImage -j16
#编译指定的设备树
make imx6ull-14x14-nand-4.3-480x272-c.dtb修改spidev驱动
默认的spidev.c中,是没有匹配你添加的设备的,因此需要修改spidev.c代码,增加compatible匹配。
/* The main reason to have this class is to make mdev/udev create the* /dev/spidevB.C character device nodes exposing our userspace API.* It also simplifies memory management.*/static struct class *spidev_class;//#ifdef CONFIG_OF
static const struct of_device_id spidev_dt_ids[] = {{ .compatible = "rohm,dh2228fv" },{ .compatible = "yang,oledsh1106" },{},
};
MODULE_DEVICE_TABLE(of, spidev_dt_ids);
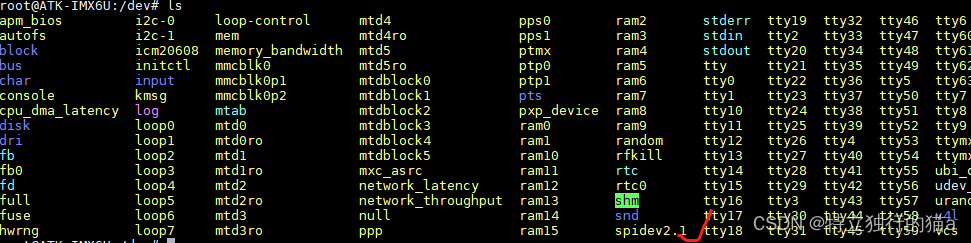
//#endif内核编译成功后,更新内核和设备树文件。启动设备后,在/sys/class/spidev下可以确认spidev枚举出了多少个spi设备。
设备树查看
查看设备树是否有新添加的节点:

更新设备树到板子上后查看下是否有生成spi设备节点:
开源测试工具
spidev驱动有现成的测试工具。其中一个常用的测试工具是spi_test,它是spidev驱动自带的测试工具,可以用于测试和调试SPI设备。spi_test可以通过命令行参数设置SPI设备的各种参数,如设备文件、传输速率、字节顺序等。使用spi_test可以发送和接收SPI数据,以验证spidev驱动的功能和性能。
在源码linux-imx-4.1.15-2.1.0-v2.7\Documentation\spi路径下,有两个测试工具的源码文件,spidev_fdx.c和spidev_test.c文件。可以直接交叉编译为可执行文件使用。这些工具都基于spidev通用设备驱动以及对应的ioctl命令实现,可以方便的用来对spi的通用型驱动来进行测试。
编译方法
#加载环境
source /opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi
#编译
$(CC) spidev_fdx.c -o spidev_fdx
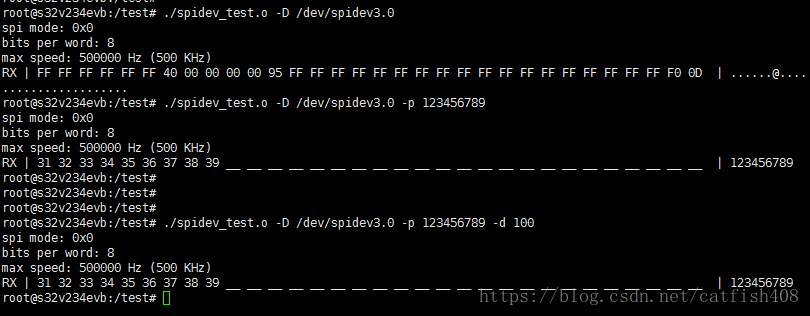
$(CC) spidev_test.c -o spidev_test回环测试
首先,将spi接口的MISO和MOSI接口短接。
其次,编译测试代码:
Documentation/spi/spidev_test.c
最后,输出结果与输入相同即为正确。
其他资源
spidev的使用(SPI用户态API)_习惯就好zz的博客-CSDN博客
基于Linux使用spidev驱动OLED - 嵌入式技术 - 电子发烧友网
0.96寸OLED屏移植到搭载mx6ull的linux系统_AURORA1997的博客-CSDN博客
嵌入式Linux驱动开发——解决/sys/bus/spi/devices下没有对应的spi设备文件_spi-max-frequency_门牙会稍息的博客-CSDN博客
嵌入式Linux驱动开发——解决/sys/bus/spi/devices下没有对应的spi设备文件_spi-max-frequency_门牙会稍息的博客-CSDN博客 spidev0.0的正确打开方式_在内核开启spidev0_blog_xu的博客-CSDN博客
编写SPI设备驱动程序_spi程序怎么编程_Hilbert(*^*)的博客-CSDN博客
154 spidev:SPI“万能”驱动_你板子冒烟了的博客-CSDN博客
i.MX6ULL驱动开发 | 14 - 基于 Linux SPI 驱动框架读取ICM-20608传感器_MCUlover666的技术博客_51CTO博客
设备树学习之(九)SPI设备注册过程_spi_lsb_first_kunkliu的博客-CSDN博客
https://www.cnblogs.com/lknlfy/p/3265019.html
设备树中的spi设备以及内核对spi节点的处理流程_linux下spi->irq_弋阳yoga的博客-CSDN博客
嵌入式Linux的两种SPI驱动方式_linux spidev_iot-lorawan的博客-CSDN博客
相关文章:
嵌入式linux通用spi驱动之spidev使用总结
Linux内核集成了spidev驱动,提供了SPI设备的用户空间API。支持用于半双工通信的read和write访问接口以及用于全双工通信和I/O配置的ioctl接口。使用时,只需将SPI从设备的compatible属性值添加到spidev区动的spidev dt ids[]数组中,即可将该SP…...

【Nodejs】Puppeteer\爬虫实践
puppeteer 文档:puppeteer.js中文文档|puppeteerjs中文网|puppeteer爬虫教程 Puppeteer本身依赖6.4以上的Node,但是为了异步超级好用的async/await,推荐使用7.6版本以上的Node。另外headless Chrome本身对服务器依赖的库的版本要求比较高,c…...

Windows Active Directory密码同步
大多数 IT 环境中,员工需要记住其默认 Windows Active Directory (AD) 帐户以外的帐户的单独凭据,最重要的是,每个密码还受不同的密码策略和到期日期的约束,为不同的帐户使用单独的密码会增加用户忘记密码和…...
安科瑞能源物联网以能源供应、能源管理、设备管理、能耗分析的能源流向为主线-安科瑞黄安南
摘要:随着科学技术的发展,我国的物联网技术有了很大进展。为了提升电力抄表服务的稳定性,保障电力抄表数据的可靠性,本文提出并实现了基于物联网的智能电力抄表服务平台,结合云计算、大数据等技术,提供电力…...
FPGA设计时序分析一、时序路径
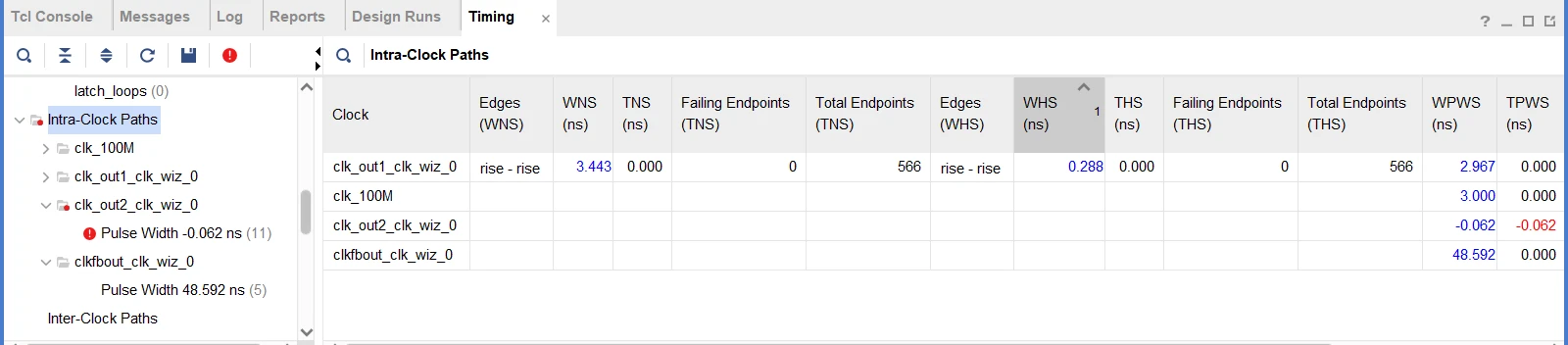
目录 一、前言 二、时序路径 2.1 时序路径构成 2.2 时序路径分类 2.3 数据捕获 2.4 Fast corner/Slow corner 2.5 Vivado时序报告 三、参考资料 一、前言 时序路径字面容易简单地理解为时钟路径,事实时钟存在的意义是为了数据的处理、传输,因此严…...
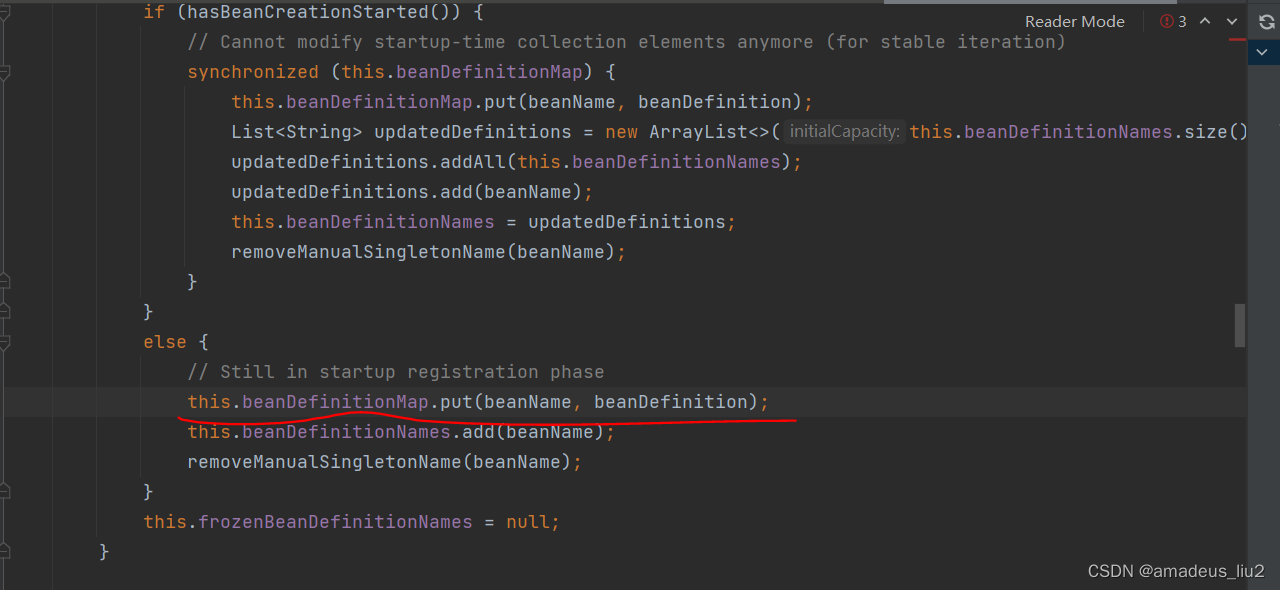
spring复习:(52)注解方式下,ConfigurationClassPostProcessor是怎么被添加到容器的?
进入AnnotationConfigApplicationContext的构造方法: 进入AnnotatedBeanDefinitionReader的构造方法: 进入this(registry, getOrCreateEnvironment(registry));代码如下: 进入AnnotationConfigUtils.registerAnnotationConfigProcessors方…...
全国大学生数据统计与分析竞赛2021年【本科组】-B题:用户消费行为价值分析
目录 摘 要 1 任务背景与重述 1.1 任务背景 1.2 任务重述 2 任务分析 3 数据假设 4 任务求解 4.1 任务一:数据预处理 4.1.1 数据清洗 4.1.2 数据集成 4.1.3 数据变换 4.2 任务二:对用户城市分布情况与分布情况可视化分析 4.2.1 城市分布情况可视化分析 4…...

力扣1667. 修复表中的名字
表: Users ------------------------- | Column Name | Type | ------------------------- | user_id | int | | name | varchar | ------------------------- 在 SQL 中,user_id 是该表的主键。 该表包含用户的 ID 和名字。…...
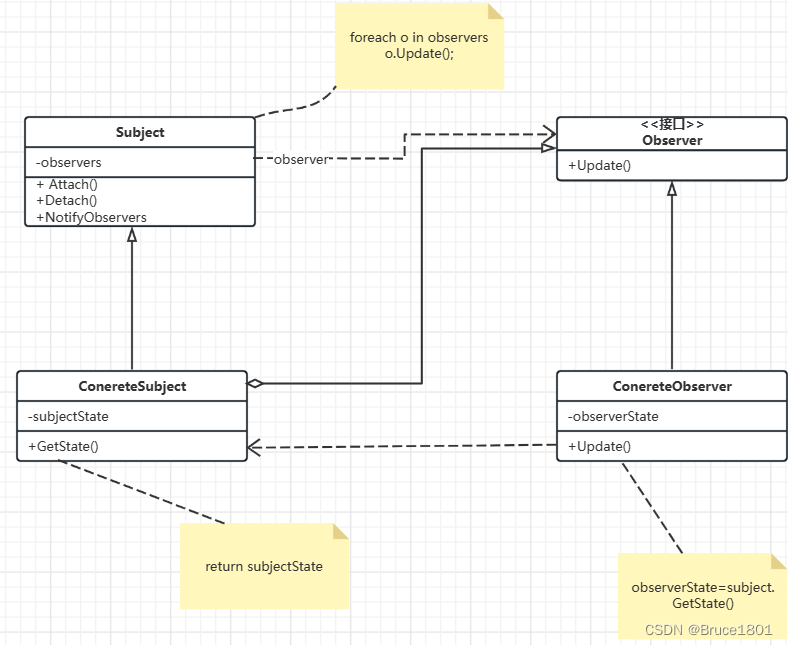
【设计模式】详解观察者模式
文章目录 1、简介2、观察者模式简单实现抽象主题(Subject)具体主题(ConcreteSubject)抽象观察者(Observer)具体观察者(ConcrereObserver)测试: 观察者设计模式优缺点观察…...
用html+javascript打造公文一键排版系统8:附件及标题排版
最近工作有点忙,所 以没能及时完善公文一键排版系统,现在只好熬夜更新一下。 有时公文有包括附件,招照公文排版规范: 附件应当另面编排,并在版记之前,与公文正文一起装订。“附件”二字及附件顺序号用3号黑…...
微服务体系<1>
我们的微服务架构 我们的微服务架构和单体架构的区别 什么是微服务架构 微服务就是吧我们传统的单体服务分成 订单模块 库存模块 账户模块单体模块 是本地调用 从订单模块 调用到库存模块 再到账户模块 这三个模块都是调用的同一个数据库 这就是我们的单体架构微服务 就是…...

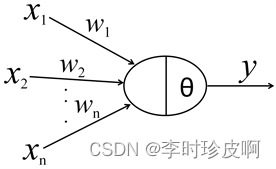
M5ATOMS3基础02传感器MPU6886
M5ATOMS3基础01按键 简洁版本 MPU6886是一款6轴IMU单元,具有3轴重力加速度计和3轴陀螺仪。它采用16位ADC,内置可编程数字滤波器和片上温度传感器,并通过I2C接口(地址为0x68)与上位机通信。MPU6886支持低功耗模式&#…...

vue 快速自定义分页el-pagination
vue 快速自定义分页el-pagination template <div style"text-align: center"><el-paginationbackground:current-page"pageObj.currentPage":page-size"pageObj.page":page-sizes"pageObj.pageSize"layout"total,prev,…...
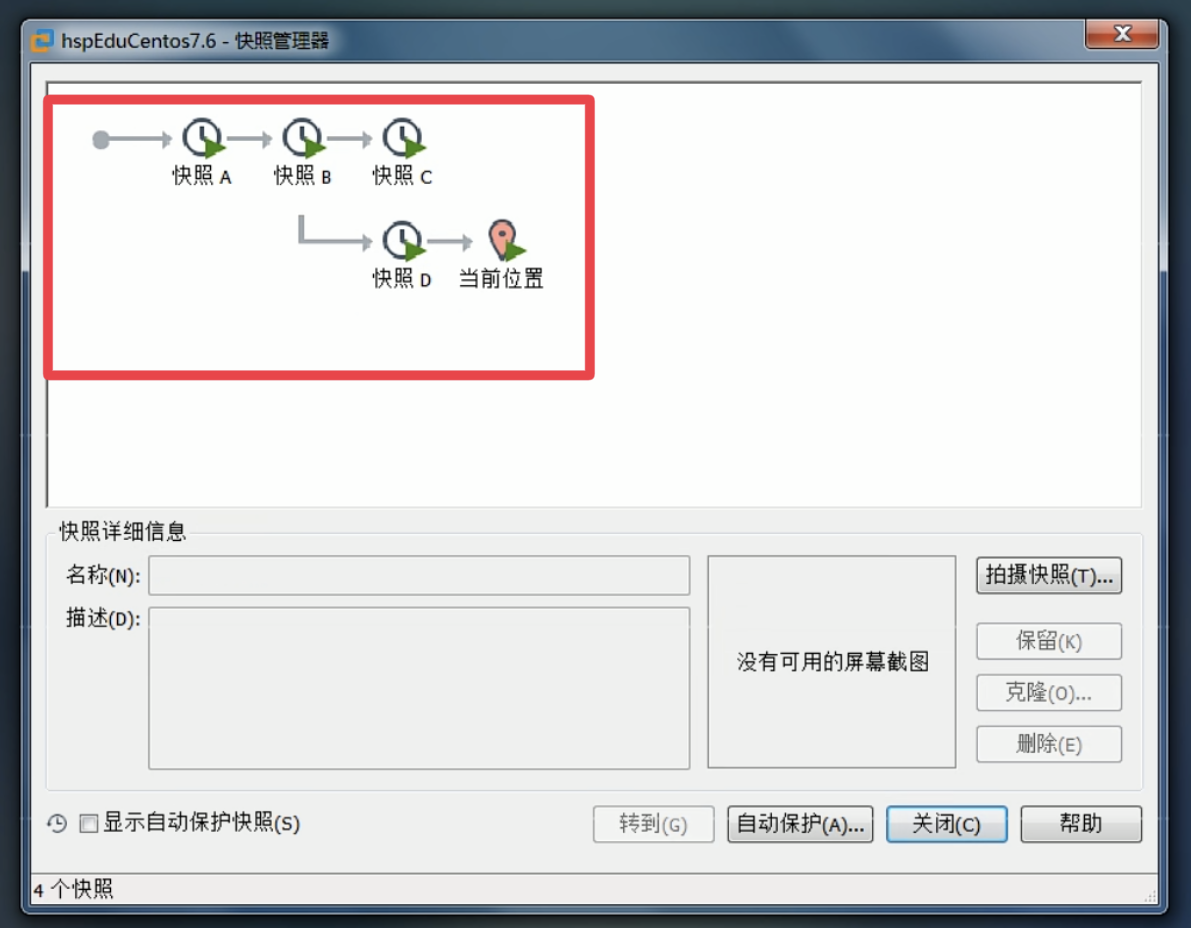
0-虚拟机补充知识
虚拟机克隆 如果想要构建服务器集群,没有必要一台一台的去进行安装,只要通过克隆就可以。 快速获得多台服务器主要有两种方式,分别为:直接拷贝操作和vmware的克隆操作 直接拷贝 将之前安装虚拟机的所有文件进行拷贝࿰…...

如何将电机控制器添加到您的 ROS 机器人
一、说明 如果您正在构建与 ROS/ROS2 一起使用的移动机器人,您需要做的第一件事就是集成电机控制器。电机控制器的目的是接受来自更高级别的软件(如导航堆栈)的消息,并将其转换为驱动电机的信号。它还将从电机的编码器接收信息,以计算机器人的速度和位置。 您可以…...

ChatGPT统计“一到点就下班”的人数
ChatGPT统计“一到点就下班”的人数 1、到点下班 Chatgpt统计各部门F-D级员工到点下班人数占比,是在批评公司内部存在到点下班现象。 根据图片,该占比的计算方法是:最后一次下班卡在17:30-17:40之间,且1-5月合计有40天以上的人…...
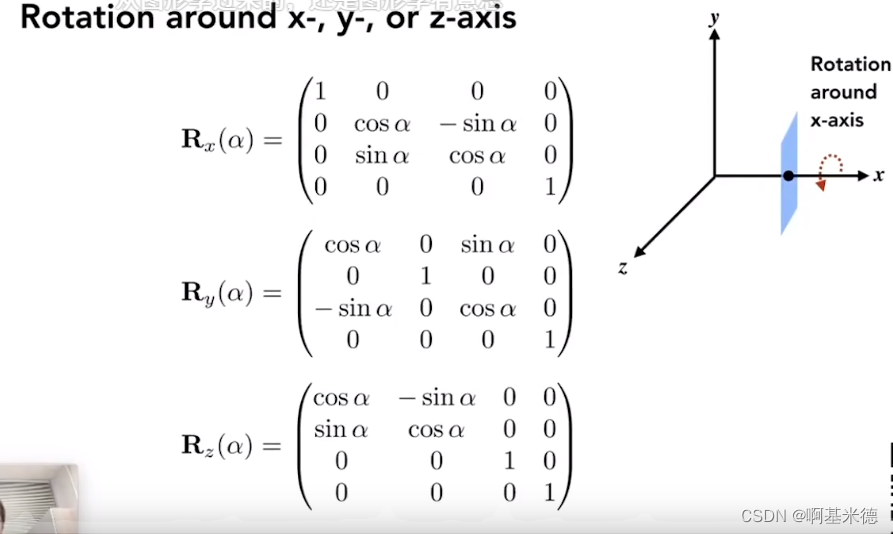
Games101学习笔记 - 变换矩阵基础
二维空间下的变换 缩放矩阵 缩放变换: 假如一个点(X,Y)。x经过n倍缩放,y经过m倍缩放,得到的新点(X1,Y1);那么新点和远点有如下关系,X1 n*X, Y1 m*Y写成矩阵就是如下…...

Ubuntu18.04未安装Qt报qt.qpa.plugin could not load the Qt platform plugin xcb问题的解决方法
在Ubuntu 18.04开发机上安装了Qt 5.14.2,当将其可执行程序拷贝到另一台未安装Qt的Ubuntu 18.04上报错:拷贝可执行程序前,使用ldd将此执行程序依赖的动态库也一起拷贝过去,包括Qt5.14.2/5.14.2/gcc_64/plugins目录系的platforms目录…...

GPT4ALL私有化部署 01 | Python环境
进入以下链接: https://www.python.org/downloads/release/python-3100/ 滑动到底部 选择你系统对应的版本,如果你是win,那么大概率是win-64bit 有可能你会因为网络的问题导致下载不了,我提供了 链接 接着只需要打开 等待…...
GPT-AI 使用的技术概览
ChatGPT 使用的技术概览 智心AI-3.5/4模型,联网对话,MJ快速绘画 从去年 OpenAI 发布 ChatGPT 以来,AI 的能力再次惊艳了世人。在这样的一个时间节点,重新去学习相关技术显得很有必要。 ChatGPT 的内容很多,我计划采用…...

端到端性能对比:NLP-StructBERT与其他开源相似度模型效果横评
端到端性能对比:NLP-StructBERT与其他开源相似度模型效果横评 最近在做一个智能客服的项目,需要判断用户问题和知识库答案的相似度。选型的时候,我对着好几个开源的中文相似度模型犯了难:都说自己效果好,到底哪个最适…...

别再死记硬背U-Net结构了!用PyTorch手撸一个,从代码反推设计思想
从零实现U-Net:用PyTorch代码拆解医学图像分割的核心设计 在医学影像分析领域,U-Net以其独特的对称结构和跳跃连接机制,成为细胞分割、肿瘤检测等任务的黄金标准。但很多开发者即便看过网络结构图,在实际编码时仍会困惑࿱…...

3个步骤解决华硕笔记本风扇异常:G-Helper智能散热控制指南
3个步骤解决华硕笔记本风扇异常:G-Helper智能散热控制指南 【免费下载链接】g-helper Lightweight, open-source control tool for ASUS laptops and ROG Ally. Manage performance modes, fans, GPU, battery, and RGB lighting across Zephyrus, Flow, TUF, Strix…...

Phi-4-mini-reasoning模型微调入门:使用自有数据提升领域推理能力
Phi-4-mini-reasoning模型微调入门:使用自有数据提升领域推理能力 1. 为什么需要微调推理模型 在实际业务场景中,通用大模型虽然具备强大的推理能力,但在特定领域的表现往往不尽如人意。比如在法律条文解读或医疗诊断建议这类专业领域&…...

Phi-3-mini-4k-instruct保姆级教学:Ollama Web UI自定义System Prompt与温度调节
Phi-3-mini-4k-instruct保姆级教学:Ollama Web UI自定义System Prompt与温度调节 你是不是已经用Ollama Web UI体验过Phi-3-mini-4k-instruct的文本生成能力了?感觉还不错,但总觉得少了点什么?比如,想让模型扮演一个专…...

OpenClaw+千问3.5-9B低成本方案:自建模型替代OpenAI API
OpenClaw千问3.5-9B低成本方案:自建模型替代OpenAI API 1. 为什么选择自建模型替代OpenAI API 去年冬天的一个深夜,我正在调试一个基于OpenClaw的自动化工作流。当看到账单上OpenAI API调用费用突破四位数时,我意识到必须寻找替代方案。这就…...

SEO_从入门到精通,掌握SEO的核心优化思路
SEO的核心优化思路:从入门到精通,你需要知道的一切 在当今的互联网时代,SEO(搜索引擎优化)已经成为了提升网站流量和品牌知名度的关键手段。无论你是新手还是已经有一些SEO知识的人,掌握SEO的核心优化思路…...

实时多人姿态估计终极指南:从理论到实践的技术突破
实时多人姿态估计终极指南:从理论到实践的技术突破 【免费下载链接】Realtime_Multi-Person_Pose_Estimation Code repo for realtime multi-person pose estimation in CVPR17 (Oral) 项目地址: https://gitcode.com/gh_mirrors/re/Realtime_Multi-Person_Pose_E…...

解锁Noria查询重用机制:如何智能复用数据流组件实现应用性能飞跃
解锁Noria查询重用机制:如何智能复用数据流组件实现应用性能飞跃 【免费下载链接】noria Fast web applications through dynamic, partially-stateful dataflow 项目地址: https://gitcode.com/gh_mirrors/no/noria 在现代Web应用开发中,性能优化…...

008.S3C2440中断分析|千篇笔记实现嵌入式全栈/裸机篇
1. 流程 S3C2440中断流程如下, 发生中断时,[SUB]SRCPND源挂起寄存器对应的bit位会置位, 然后[SUB]MASK屏蔽寄存器对应的bit位会卡一下,决定中断流要不要继续, 也就是说不管中断有没有被屏蔽,源挂起寄存…...