ros2 launch 集合 gazebo yolov8 rviz2
目录
1. ros2 yolov8 检测需要以来一些库,分别是:rclpy cv_bridge std_msgs sensor_msgs sensor_msgs_py vision_msgs
2. 创建一个新的功能包
3. 建立 yolo_launch.py 里面先加载gazebo和rviz2,在创建好本地的yolov8的node文件后也加入进来。
4. 创建好本地的yolov8的node文件
5. 修改setup.py文件
6. 编译包
7. 运行launch文件
1. ros2 yolov8 检测需要以来一些库,分别是:rclpy cv_bridge std_msgs sensor_msgs sensor_msgs_py vision_msgs
(1) rclpy Python语言的ROS Client Library,操作ROS2的节点话题服务
(2) cv-bridge 在ROS图像消息和OpenCV图像之间进行转换的一个功能包
(3) std-msgs 一种标准消息类型包,包含了一些常用的基本数据类型的消息定义
以上设计的是图像依赖的,下面两个是获取其他数据类型的
---------------------------------------------------------------
(4) sensor-msgs-py point_cloud2模块
(5) vision-msgs ROS的与算法无关的计算机视觉消息类型,ROS视觉信息介绍该软件包定义了一组消息,以统一ROS中的计算机视觉和对象检测工作
# 库安装命令如下:
sudo apt-get install ros-galactic-rclpy
sudo apt-get install ros-galactic-cv-bridge
sudo apt-get install ros-galactic-std-msgs
sudo apt-get install ros-galactic-sensor-msgs-py
sudo apt-get install ros-galactic-vision-msgs2. 创建一个新的功能包
ros2 pkg create ros_yolov8 --build-type ament_python --node-name detect_node --dependencies rclpy cv_bridge std_msgs sensor_msgs sensor_msgs_py vision_msgs运行结果:
going to create a new package package name: ros_yolov8 destination directory: package format: 3 version: 0.0.0 description: TODO: Package description maintainer: licenses: ['TODO: License declaration'] build type: ament_python dependencies: ['rclpy', 'cv_bridge', 'std_msgs', 'sensor_msgs', 'sensor_msgs_py', 'vision_msgs'] node_name: detect_node creating folder ./ros_yolov8 creating ./ros_yolov8/package.xml creating source folder creating folder ./ros_yolov8/ros_yolov8 creating ./ros_yolov8/setup.py creating ./ros_yolov8/setup.cfg creating folder ./ros_yolov8/resource creating ./ros_yolov8/resource/ros_yolov8 creating ./ros_yolov8/ros_yolov8/__init__.py creating folder ./ros_yolov8/test creating ./ros_yolov8/test/test_copyright.py creating ./ros_yolov8/test/test_flake8.py creating ./ros_yolov8/test/test_pep257.py creating ./ros_yolov8/ros_yolov8/detect_node.py
# ./ros_yolov8/package.xml
<?xml version="1.0"?>
......<depend>rclpy</depend>
<depend>cv_bridge</depend>
<depend>std_msgs</depend>
<depend>sensor_msgs</depend>
<depend>sensor_msgs_py</depend>
<depend>vision_msgs</depend>......
</package>
3. 建立 yolo_launch.py 里面先加载gazebo和rviz2,在创建好本地的yolov8的node文件后也加入进来。
# 创建一个新目录来存储(launch)启动文件
cd ./ros_yolov8 && mkdir launch
cd ./ros_yolov8/launch && touch detect_demo.launch.py
tree ./ros_yolov8/launch运行结果:
./ros_yolov8/launch └── detect_demo.launch.py
#!/usr/bin/python3
# ./ros_yolov8/launch/detect_demo.launch.pyimport osfrom ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescription
from launch_ros.actions import Nodefrom launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument
from launch.conditions import IfConditionfrom launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSourcedef generate_launch_description():# all kinds of file pathros_root_path = "/xxx/ros2_ws"try:pkg_name = "ros_yolov8"share_pkg_path = get_package_share_directory(pkg_name)except:share_pkg_path = os.path.join(ros_root_path, "install", pkg_name, "share", pkg_name)print(f"{share_pkg_path=}")assert os.path.exists(share_pkg_path)# -1-Include the Gazebo launch file, provided by the gazebo_ros packageworld_file_path = os.path.join(share_pkg_path, 'worlds', 'yolo.world')# 包含其它的launch文件 :/opt/ros/galactic/share/gazebo_ros/launch/gazebo.launch.py# $ ros2 launch /opt/ros/galactic/share/gazebo_ros/launch/gazebo.launch.py world:=/xxx/yolo.worldgazebo_ros_dirpath = get_package_share_directory('gazebo_ros')print(f"{gazebo_ros_dirpath=}")gazebo_launch_filepath = os.path.join(gazebo_ros_dirpath, 'launch', 'gazebo.launch.py')print(f"{gazebo_launch_filepath=}")assert os.path.exists(gazebo_launch_filepath)# -2-Include the Rviz2 config file, provided by the rviz2 package# /opt/ros/galactic/lib/rviz2/rviz2# $ ros2 run rviz2 rviz2 -d # start rviz2rviz_filepath = os.path.join(share_pkg_path, 'rviz2', 'yolo.rviz')print(f"{rviz_filepath=}")assert os.path.exists(rviz_filepath)# Nodesgazebo_cmd = IncludeLaunchDescription(PythonLaunchDescriptionSource([gazebo_launch_filepath]),launch_arguments={'world': world_file_path}.items())static_transform_cmd = Node(package='tf2_ros',executable='static_transform_publisher',name='static_transform_publisher',arguments=["0", "0", "0", "0", "0", "0", "map", "camera_link_optical"],output='screen')start_rviz_cmd = Node(package='rviz2',executable='rviz2',name='rviz2',arguments=['-d', rviz_filepath],output='screen')# Launch arguments# start yolov8_nodestart_yolov8_node = Node(package='ros_yolov8',executable='yolov8_node',name='yolov8_node',output='screen',arguments=["-model", "/xxx/yolo.pt"])# Add everything to launch description and returnld = LaunchDescription()ld.add_action(gazebo_cmd)ld.add_action(static_transform_cmd)ld.add_action(start_rviz_cmd)ld.add_action(start_yolov8_node)return ld"""
/opt/ros/galactic/lib/tf2_ros/static_transform_publisher
# ros2 run tf2_ros static_transform_publisher "0" "0" "0" "0" "0" "0" "map" "camera_link_optical"
# -2-1- map axis between origin and world
"""4. 创建好本地的yolov8的node文件
# ./ros_yolov8/ros_yolov8/yolov8_node.pyimport os
import sys
import time
import argparse
import random
import torch
# ROS2的客户端库(python) rclpy
import rclpy
from rclpy.qos import qos_profile_sensor_data
from rclpy.node import Node
# image-----below----
# topic sensor_msgs/msg/Image to cv2
import cv2
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
# yolov8
from ultralytics import YOLOdef parse_argument():parser = argparse.ArgumentParser(description='detect image from topic (gazebo)')parser.add_argument('-model', type=str, default='/xxx/yolo.pt')parser.add_argument('-device', type=str, default='cpu')parser.add_argument('-conf_threshold', type=float, default=0.5)parser.add_argument('-iou_threshold', type=float, default=0.7)parser.add_argument('-enable', type=bool, default=True)parser.add_argument('-input_image_topic', type=str, default='/camera/image_raw')parser.add_argument('-show_inference_image', type=bool, default=True)parser.add_argument('-save', type=bool, default=False)args, unknown = parser.parse_known_args()return argsclass Yolov8Node(Node):# Node constructordef __init__(self) -> None:super().__init__("yolov8_node")# node paramsself.args = parse_argument()#self._class_to_color = {}self.cv_bridge = CvBridge()# yoloself.yolo = YOLO(self.args.model)self.yolo.fuse()print(f"{self.args.device=}")self.yolo.to(self.args.device)# topic publishers & subscribersself._infer_pub = self.create_publisher(Image, "inference_image", 10)self._image_sub = self.create_subscription(Image,self.args.input_image_topic,self.image_cb,qos_profile_sensor_data)def image_cb(self, msg: Image) -> None:# if self.args.enable:# record start timefps_start_t = time.time()# convert to cv image & predictcv_image = self.cv_bridge.imgmsg_to_cv2(msg)infer_start_t = time.perf_counter()results = self.yolo.predict(source=cv_image,verbose=False,stream=False,conf=self.args.conf_threshold,iou=self.args.iou_threshold,show=self.args.show_inference_image,mode="predict",save=self.args.save)end_time = time.perf_counter()# visualize the results on the frameannotated_image = results[0].plot()# record the end time and calculate FPSfps = 1.0 / (end_time - fps_start_t)cv2.putText(annotated_image, "FPS: {:.2f}".format(fps), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)results = results[0].cpu()for b in results.boxes:label = self.yolo.names[int(b.cls)]score = float(b.conf)if score < self.args.conf_threshold:continue# get boxes valuesbox = b.xywh[0]x_center = float(box[0])y_center = float(box[1])x_size = float(box[2])y_size = float(box[3])x_min = round(x_center - x_size / 2.0)x_max = round(x_center + x_size / 2.0)y_min = round(y_center - y_size / 2.0)y_max = round(y_center + y_size / 2.0)# draw boxes for debuggingif label not in self._class_to_color:r = random.randint(0, 255)g = random.randint(0, 255)b = random.randint(0, 255)self._class_to_color[label] = (r, g, b)color = self._class_to_color[label]cv2.rectangle(cv_image, (x_min, y_min), (x_max, y_max), color, 2)label = "{} ({:.3f})".format(label, score)pos = (x_min + 5, y_min + 25)font = cv2.FONT_HERSHEY_SIMPLEXcv2.putText(cv_image, label, pos, font,1, color, 1, cv2.LINE_AA)# append msgself._infer_pub.publish(self.cv_bridge.cv2_to_imgmsg(annotated_image, encoding=msg.encoding))def main():rclpy.init()node = Yolov8Node()rclpy.spin(node)node.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
5. 修改setup.py文件
# ./ros_yolov8/setup.py
from setuptools import setup
import os
from glob import globpackage_name = 'ros_yolov8'setup(name=package_name,version='0.0.0',packages=[package_name],# new ros2_ws/install/{package_name}/share/*, copy from src/{package_name}/*data_files=[('share/ament_index/resource_index/packages', ['resource/' + package_name]),('share/' + package_name, ['package.xml']),# During installation, we need to copy the launch files(os.path.join('share', package_name, "launch"), glob('launch/*launch.[pxy][yma]*')),# Same with the RViz2 configuration file.(os.path.join('share', package_name, "rviz2"), glob('rviz2/*')),# And the Gazebo world files.(os.path.join('share', package_name, "worlds"), glob('worlds/*')),# And the config files.(os.path.join('share', package_name, "config"), glob('config/*')),],
......6. 编译包
source /opt/ros/galactic/setup.bash
colcon build --packages-select ros-yolov8
. install/setup.bash7. 运行launch文件
ros2 launch /xxx/ros_yolov8/launch/detect_demo.launch.py
# 或
ros2 launch ros_yolov8 detect_demo.launch.py相关文章:

ros2 launch 集合 gazebo yolov8 rviz2
目录 1. ros2 yolov8 检测需要以来一些库,分别是:rclpy cv_bridge std_msgs sensor_msgs sensor_msgs_py vision_msgs 2. 创建一个新的功能包 3. 建立 yolo_launch.py 里面先加载gazebo和rviz2,在创建好本地的yolov8的node文件后也加入进来。 4. 创建好本地的yol…...
SD NAND【商业】
SD NAND【商业】 前言版权推荐SD NAND外观NAND与TF卡的区别雷龙CS SD NAND(贴片式TF卡)性能体验及应用 最后 前言 2023-7-23 16:20:19 因为本人对硬件了解不是很多,所以该篇参考自官方文档。 以下内容源自《【商业】》 仅供学习交流使用 版权 禁止其他平台发布…...
转换)
实现任意进制(2—32)转换
2020/01/01 实现原理参考代码测试样例其他补充后记交流 实现原理 本程序借助10进制数为中介数据,实现任意进制数之间的相互转换(2-36进制范围) 需要注意的是,数值范围不可超出 long long int 所表示的范围,即所输入需…...

Spring Boot 集成 Redis 三种模式实践汇总
背景 项目的某个模块集成了 SpringBoot Redis 包,客户端使用 Lettuce,Redis 测试环境单机模式。但是现场反馈的 Redis 环境是集群,如果简单的修改 spring.redis 配置为集群的配置信息,程序能否能无缝衔接呢? 本文记录…...

MySQL DQL语法
MySQL DQL语法 DQL语法简介 DQL(Data Query Language)语句是一种用于从数据库中检索数据的语言。它主要用于数据查询和数据分析,而不是对数据库中的数据进行更新、插入或删除。DQL语句通常用于获取特定条件下的数据,进行聚合计算…...
带头结点链表的反向输出)
算法之线性表1.1.1(7)带头结点链表的反向输出
设L为带头结点的单链表,编写算法实现从尾到头反向输出每个节点的值。 算法思想: 方法一:将链表压栈再输出,时间复杂度为O(n),空间复杂度为O(n) 方法二:用头插法重新建立单链表在输出,时间复杂度为O(n),空…...
)
设计模式三:抽象工厂模式(Abstract Factory Pattern)
抽象工厂模式(Abstract Factory Pattern)是一种创建型设计模式,它提供了一种方式来创建一系列相关或相互依赖的对象,而无需指定具体实现类。 在软件开发中,有时候需要根据不同的条件或环境来创建一组相关的对象。抽象工…...
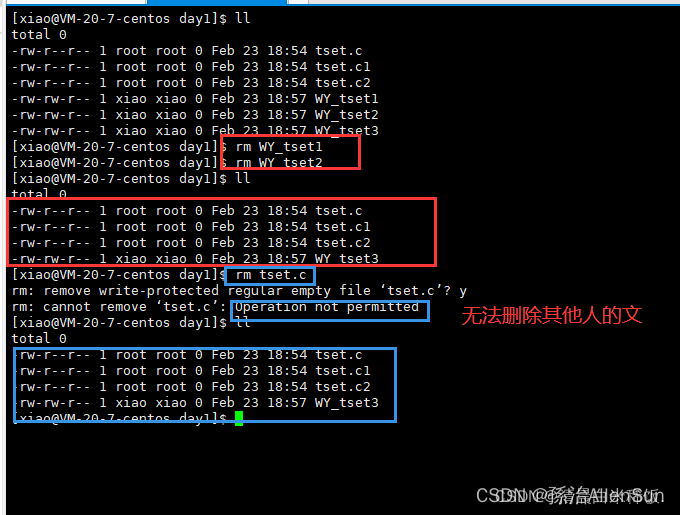
Linux用户权限问题详解
Linux用户权限问题详解 【一】Linux权限的概念(1)用户类型(2)如何切换用户(3)用户相关的一些命令 【二】Linux文件权限管理(1)文件访问者的分类(2)文件类型和…...

flask中的session介绍
flask中的session介绍 在Flask中,session是一个用于存储特定用户会话数据的字典对象。它在不同请求之间保存数据。它通过在客户端设置一个签名的cookie,将所有的会话数据存储在客户端。以下是如何在Flask应用中使用session的基本步骤: 首先…...
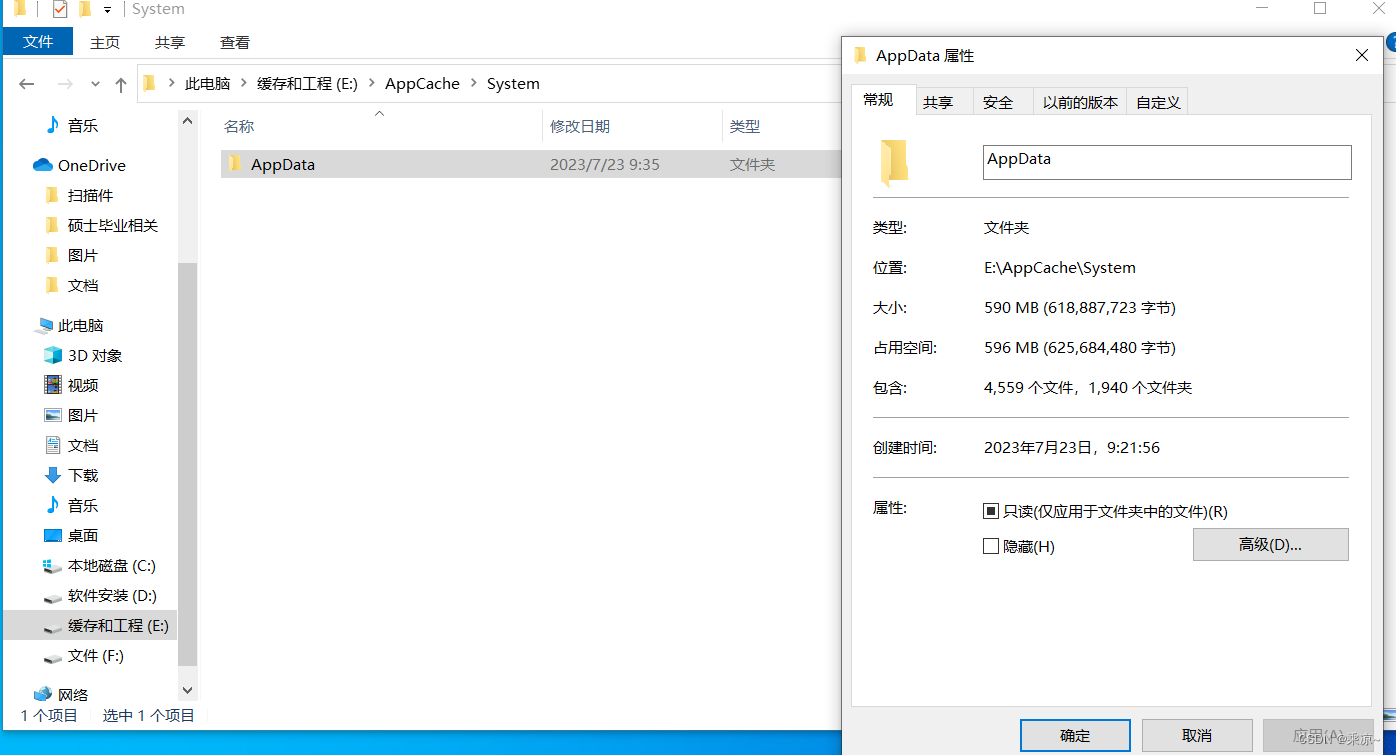
记录联想拯救者R720重装系统
文章目录 bios里找不到U盘启动项2023.7.23重装系统后数据记录C盘内存修改默认AppData的路径(亲测,没用) bios里找不到U盘启动项 制作好启动盘后,开机按F2进入bios后,找不到U盘启动项,如下图所示࿱…...
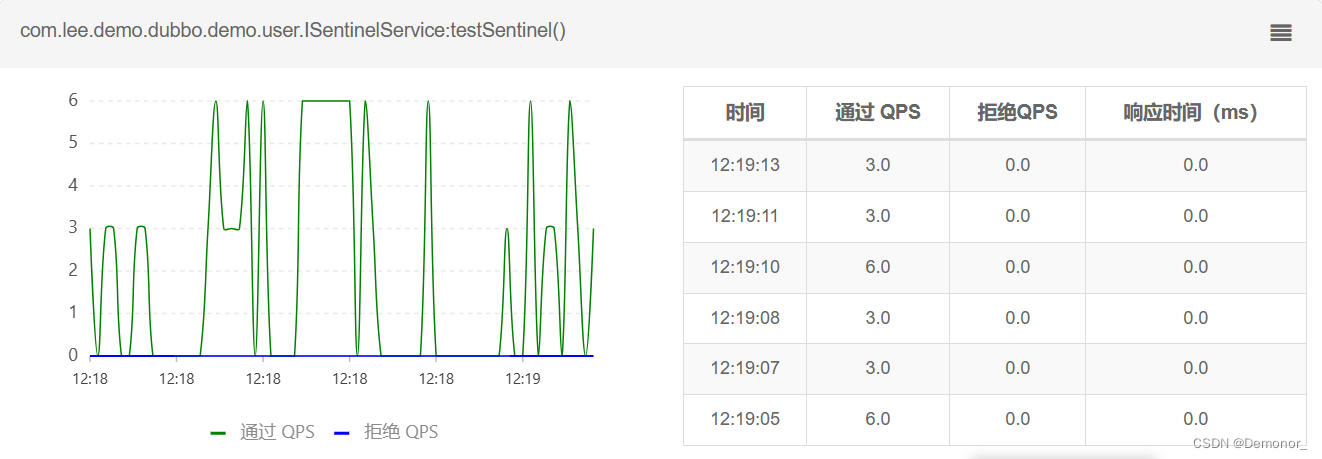
Spring Alibaba Sentinel实现集群限流demo
1.背景 1.什么是单机限流? 小伙伴们或许遇到过下图这样的限流配置 又或者是这样的Nacos动态配置限流规则: 以上这些是什么限流?没错,就是单机限流,那么单机限流有什么弊端呢? 假设我们集群部署3台机器&a…...

102、SOA、分布式、微服务之间有什么关系和区别?
SOA、分布式、微服务之间有什么关系和区别? 分布式架构是指将单体架构中的各个部分拆分,然后部署到不同的机器或进程中去,SOA和微服务基本上都是分布式架构师SOA是一种面向服务的架构,系统的所有服务都注册在总线上,当调用服务时…...

Ubuntu 20.04下的录屏与视频剪辑软件
ubuntu20.04下的录屏与视频剪辑 一、录屏软件SimpleScreenRecorder安装与使用 1、安装 2、设置录制窗口参数 3、开始录制 二、视频剪辑软件kdenlive的安装 1、安装 2、启动 一、录屏软件SimpleScreenRecorder安装与使用 1、安装 (1)直接在终端输入以下命…...

面试题 -- iOS数据存储
文章目录 一、如果后期需要增加数据库中的字段怎么实现,如果不使用CoreData呢?二、SQLite 数据存储是怎么用?三、简单描述下客户端的缓存机制?四、实现过多线程的Core Data 么?NSPersistentStoreCoordinator࿰…...
environment、systemProperties、systemEnvironment三个bean是在哪里被添加到容器的?)
spring复习:(51)environment、systemProperties、systemEnvironment三个bean是在哪里被添加到容器的?
一、主类: package cn.edu.tju.study.service.anno;import cn.edu.tju.study.service.anno.config.MyConfig; import cn.edu.tju.study.service.anno.domain.Person; import com.sun.javafx.runtime.SystemProperties; import org.springframework.context.annotat…...
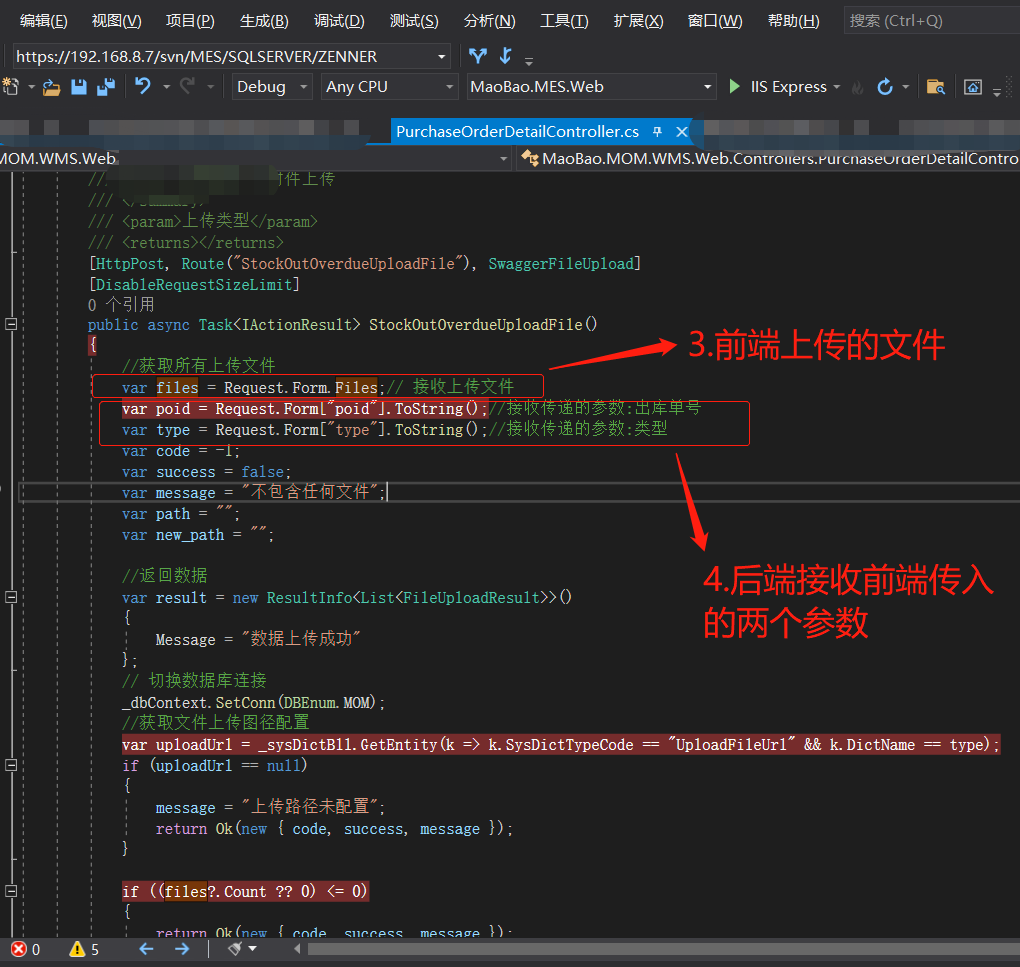
element ui 上传控件携带参数到后端
1.携带固定参数: 2.携带不固定参数: <el-row> <el-col :span"24"> <el-upload :multiple"false" :show-file-list"false" :on-success"f_h…...

scrapy分布式+指纹去重原理
1,指纹去重原理存在于 scrapy.util.requests 里面 需要安装的包 pip install scrapy-redis-cluster # 安装模块 pip install scrapy-redis-cluster0.4 # 安装模块时指定版本 pip install --upgrade scrapy-redis-cluster # 升级模块版本 2,setting配置 …...
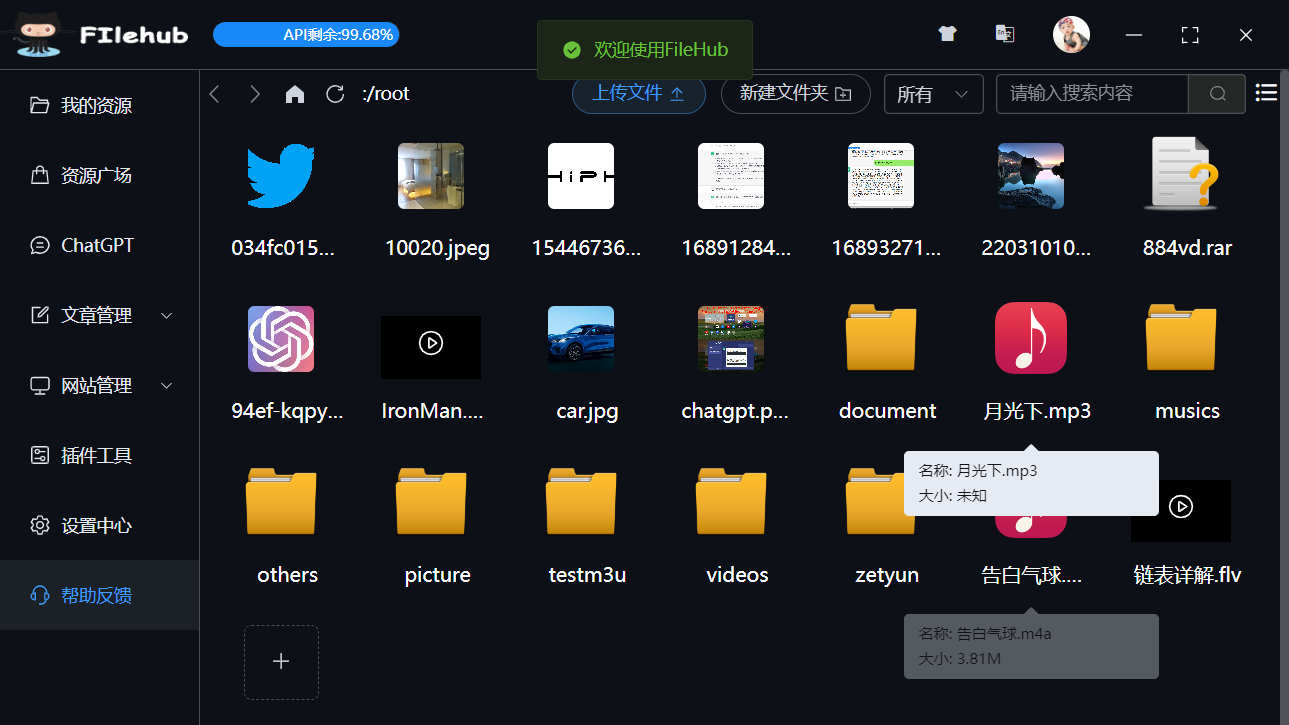
FileHub使用教程:Github Token获取步骤,使用快人一步
FileHub介绍 filehub是我开发的一个免费文件存储软件,可存万物。软件仓库:GitHub - Sjj1024/s-hub: 一个使用github作为资源存储的软件 软件下载地址:。有问题可以留言或者提Issue, 使用第一步:获取Github Token 使…...

嵌入式开发:单片机嵌入式Linux学习路径
SOC(System on a Chip)的本质区别在于架构和功能。低端SOC如基于Cortex-M架构的芯片,如STM32和NXP LPC1xxx系列,不具备MMU(Memory Management Unit),适用于轻量级实时操作系统如uCOS和FreeRTOS。…...

Libvirt的virsh工具常用命令
在使用Libvirt的virsh工具时,以下是常见的一些命令: 连接到Hypervisor: virsh -c <URI>:连接到指定的Hypervisor,例如 virsh -c qemu:///system 连接到本地的QEMU/KVM Hypervisor。 虚拟机管理: list…...
)
告别龟速迭代!用埃特金算法2步搞定方程求根(附C++代码实战)
告别龟速迭代!用埃特金算法2步搞定方程求根(附C代码实战) 在数值计算的世界里,求解非线性方程根就像一场与时间的赛跑。工程师们常常被困在缓慢收敛的迭代法中,眼看着计算资源被一点点消耗,而精度提升却如同…...

如何提高SEO关键词优化推广的转化率
如何提高SEO关键词优化推广的转化率 在当今数字化时代,搜索引擎优化(SEO)已经成为企业在网络上获得曝光和流量的关键手段。在SEO中,关键词优化是提高网站排名的核心环节。单纯依靠关键词优化,并不能保证高转化率。如何…...

线性代数实战:特征值与二次型的核心应用解析
1. 特征值与特征向量的实战密码 第一次接触特征值和特征向量时,我也觉得这不过是数学课本里的抽象概念。直到在图像压缩项目中亲眼看到,用前20%的特征向量就能还原90%的图像信息,才真正理解它的威力。特征值分解就像给矩阵做X光,能…...

MySQL后端开发核心知识点
一、存储引擎(只重点 InnoDB)MySQL 5.5 以后默认引擎是 InnoDB,也是现代企业项目唯一使用的引擎。InnoDB 特点:支持 事务支持 行级锁,并发性能好支持 外键(实际开发基本不用)基于 B 树索引结构依…...

某音抓包翻车实录:从Hook失败到稳定替换so的踩坑与修复指南
移动端安全测试进阶:Hook失效后的SO文件修改实战解析 当我们在移动端安全测试或逆向分析过程中遇到常规Hook方法失效时,往往需要深入底层寻找解决方案。本文将分享一个典型的案例:当Frida动态注入无法达到预期效果时,如何通过静态…...

m3pi嵌入式机器人底层驱动解析:HAL/LL混合架构与实时电机控制
1. m3pi嵌入式机器人平台底层驱动技术解析m3pi是面向教育与工程验证场景的轻量级嵌入式机器人控制平台,其名称源于“mbed 3pi”,表明其硬件架构继承自Pololu 3pi智能小车,并深度适配ARM Cortex-M系列MCU(主要为STM32F4系列&#…...

编程中输入特殊字符的通用方法
编程里的特殊字符(比如 # $ % ^ & * / \ < > " 等)分两种场景:直接键盘输入(写代码最常用)、代码里输出 / 转义(程序运行时显示),我给你整理了最简单、全覆盖的用法…...

STM32开发中printf重定向的两种实现方法
1. STM32开发中的printf重定向需求解析在嵌入式开发中,调试信息的输出是开发过程中不可或缺的一环。对于STM32这类ARM Cortex-M系列微控制器而言,标准库中的printf函数默认是无法直接使用的,因为这类设备通常没有像PC那样的标准输出设备。这就…...

2026届必备的十大降重复率工具实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 当前,人工智能生成内容于各类文本里的广泛运用引发了对于原创性以及真实性的关注…...
)
学生评教|高校评教|基于SpringBoot+vue高校学生评教系统 (源码+数据库+文档)
高校学生评教系统 目录 基于SpringBootvue高校学生评教系统 一、前言 二、系统设计 三、系统功能设计 1学生功能模块 2管理员功能模块 3老师功能模块 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍&a…...