【驱动开发day4作业】
头文件代码
#ifndef __HEAD_H__
#define __HEAD_H__
typedef struct{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
}gpio_t;
#define PHY_LED1_ADDR 0X50006000
#define PHY_LED2_ADDR 0X50007000
#define PHY_LED3_ADDR 0X50006000
#define PHY_RCC_ADDR 0X50000A28
//功能码
#define LED_ON _IOW('l',1,int)
#define LED_OFF _IOW('l',0,int)#endif
应用层代码
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <sys/ioctl.h>
#include "head.h"int main(int argc, char const *argv[])
{char buf[128] = {0};int a, b;int fd;while (1){// 从终端读取printf("请输入要打开哪个设备>");printf("0:LED1 1:LED2 2:LED3\n");printf("请输入>");scanf("%d", &b);if (b == 0){fd = open("/dev/mycdev0", O_RDWR);}else if (b == 1){fd = open("/dev/mycdev1", O_RDWR);}else if (b == 2){fd = open("/dev/mycdev2", O_RDWR);}if (fd < 0){printf("打开设备文件失败\n");exit(-1);}printf("请输入指令\n");printf("0(关灯) 1(开灯)\n");printf("请输入>");scanf("%d", &a);switch (a){case 1:ioctl(fd, LED_ON); // 开灯break;case 0:ioctl(fd, LED_OFF);break;}close(fd);}return 0;
}
驱动代码
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include<linux/slab.h>
#include<linux/cdev.h>
#include "head.h"dev_t devid;
struct cdev *cdev;
unsigned int major = 500;
unsigned int minor = 0;
gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;
struct class *cls;
struct device *dev;
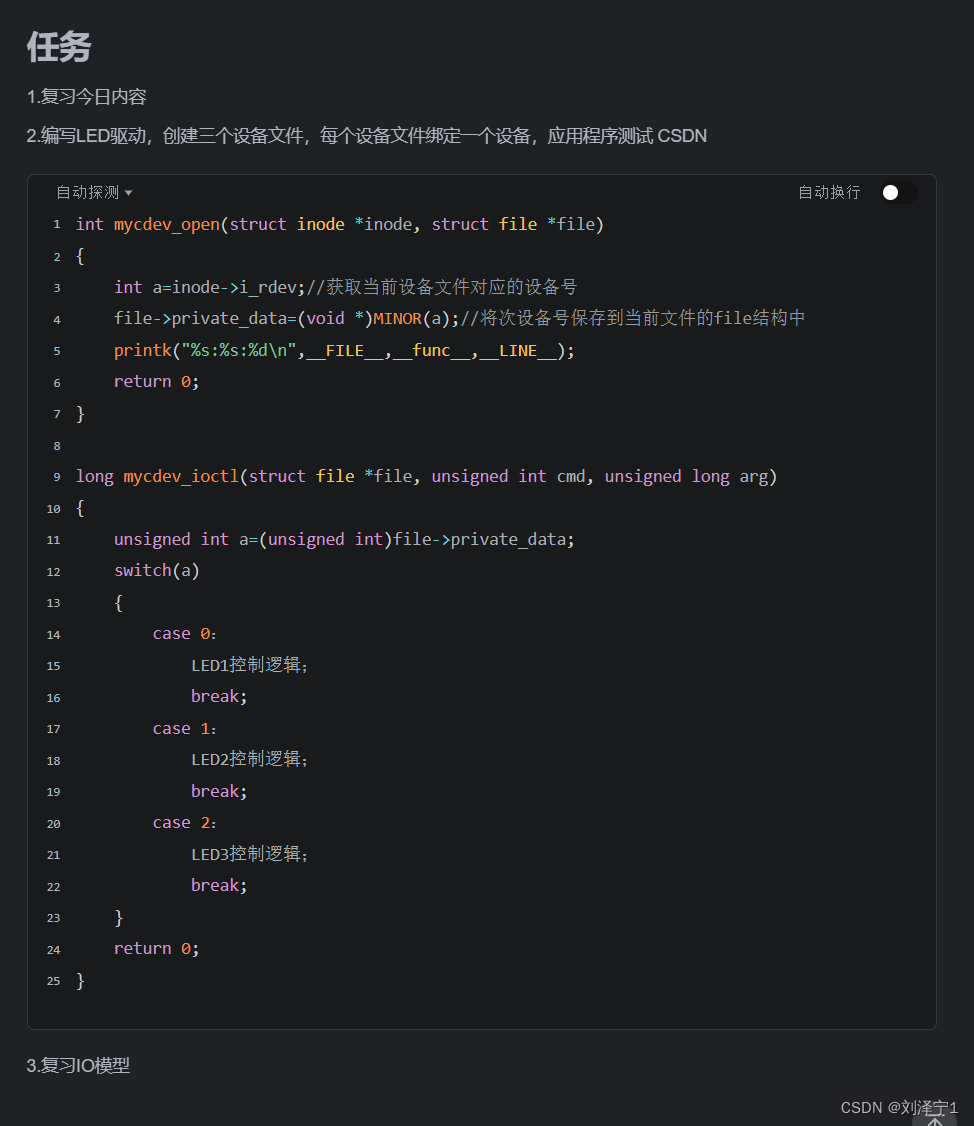
int mycdev_open(struct inode *inode, struct file *file)
{//获取当前设备文件对应的设备号int which_dev = inode->i_rdev;//将次设备号保存到当前文件的file结构中file->private_data = (void *)MINOR(which_dev);printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{unsigned int which_dev = (unsigned int)file->private_data; switch(which_dev){case 0://LED1控制逻辑;if(cmd == LED_ON){vir_led1->ODR |= (0x1 << 10); // LED1开灯}else if(cmd == LED_OFF){vir_led1->ODR &= (~(0X1 << 10));}break; case 1://LED2控制逻辑;if(cmd == LED_ON){vir_led2->ODR |= (0x1 << 10); // LED2开灯}else if(cmd == LED_OFF){vir_led2->ODR &= (~(0X1 << 10));}break; case 2://LED3控制逻辑;if(cmd == LED_ON){vir_led3->ODR |= (0x1 << 8); // LED3开灯}else if(cmd == LED_OFF){vir_led3->ODR &= (~(0X1 << 8));}break; }return 0;
}ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}// 定义操作方法风扇结构体变量并赋值
struct file_operations fops = {.open = mycdev_open,.unlocked_ioctl = mycdev_ioctl,.release = mycdev_close,.read = mycdev_read,.write = mycdev_write,
};// 灯的寄存器映射以及初始化
int all_led_init(void)
{// 寄存器地址的映射vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));if (vir_led1 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));if (vir_led2 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_rcc = ioremap(PHY_RCC_ADDR, 4);if (vir_rcc == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}printk("物理地址映射成功\n");// 寄存器的初始化// rcc(*vir_rcc) |= (3 << 4);// led1vir_led1->MODER &= (~(3 << 20));vir_led1->MODER |= (1 << 20);vir_led1->ODR &= (~(1 << 10));// led2vir_led2->MODER &= (~(3 << 20));vir_led2->MODER |= (1 << 20);vir_led2->ODR &= (~(1 << 10));// led3vir_led3->MODER &= (~(3 << 16));vir_led1->MODER |= (1 << 16);vir_led1->ODR &= (~(1 << 8));printk("灯的寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{int ret;// 1.申请对象空间 cdev_alloccdev = cdev_alloc();if (cdev == NULL){printk("申请驱动对象空间失败\n");ret = -EFAULT;goto OUT1;}printk("申请驱动对象空间成功\n");// 2.初始化对象 cdev_initcdev_init(cdev, &fops);// 3.申请设备号 register_chrdev_region()/alloc_chrdev_region()// 动态申请if (major == 0){ret = alloc_chrdev_region(&devid, minor, 3, "mycdev");if (ret != 0){printk("动态申请设备号失败\n");goto OUT2;}//统一后面的操作major = MAJOR(devid); //根据设备号获取主设备号minor = MINOR(devid);}//静态指定申请else{ret = register_chrdev_region(MKDEV(major,minor),3,"mycdev");if(ret != 0){printk("静态指定设备号失败\n");goto OUT2;}}printk("申请设备号成功\n");// 4.注册驱动对象 cdev_add()ret = cdev_add(cdev, MKDEV(major,minor), 3);if (ret != 0){printk("注册设备驱动对象失败\n");goto OUT3;}printk("注册设备驱动对象成功\n");// 5.向上提交目录 class_create()cls = class_create(THIS_MODULE, "mycdev");if (IS_ERR(cls)){printk("向上提交目录失败\n");goto OUT4;}printk("向上提交目录成功\n");// 6.向上提交设备信息 device_create()int i;for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "mycdev%d",i);}if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");goto OUT5;}printk("向上提交设备节点信息成功\n");// 灯的寄存器映射以及初始化all_led_init();return 0;
OUT5:
//将提交成功的设备信息销毁
for(--i;i>=0;i--)
{device_destroy(cls,MKDEV(major,i));
}
OUT4:class_destroy(cls);
OUT3:unregister_chrdev_region(MKDEV(major,minor), 3);
OUT2:kfree(cdev);
OUT1:return ret;
}static void __exit mycdev_exit(void)
{// 取消地址映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_rcc);// 1.销毁设备信息 device_destroyint i;for(i=0;i<3;i++){device_destroy(cls,MKDEV(major,i));}// 2.销毁目录 class_destroyclass_destroy(cls);// 3.注销驱动对象 cdev_delcdev_del(cdev);// 4.释放设备号 unregister_chrdev_region()unregister_chrdev_region(MKDEV(major,minor),3);// 5.释放对象空间 kfree()kfree(cdev);
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");相关文章:
【驱动开发day4作业】
头文件代码 #ifndef __HEAD_H__ #define __HEAD_H__ typedef struct{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR; }gpio_t; #define PHY_LED1_ADDR 0X50006000 #define PHY_LED2_ADDR 0X50007000 #…...

Ubuntu 20.04 Ubuntu18.04安装录屏软件Kazam
1.在Ubuntu Software里面输入Kazam,就可以找不到这个软件,直接点击install就可以了 2.使用方法: 选择Screencast(录屏) Fullscreen(全屏)-----Windows(窗口)--------Ar…...

ADC 的初识
ADC介绍 Q: ADC是什么? A: 全称:Analog-to-Digital Converter,指模拟/数字转换器 ADC的性能指标 量程:能测量的电压范围分辨率:ADC能辨别的最小模拟量,通常以输出二进制数的位数表示,比如&am…...

MMdetection框架速成系列 第07部分:数据增强的N种方法
MMdetection框架实现数据增强的N种方法 1 为什么要进行数据增强2 数据增强的常见误区3 常见的六种数据增强方式3.1 随机翻转(RandomFlip)3.2 随机裁剪(RandomCrop)3.3 随机比例裁剪并缩放(RandomResizedCrop࿰…...

基于Kitti数据集的智能驾驶目标检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于Kitti数据集的智能驾驶目标检测系统可用于日常生活中检测与定位行人(Pedestrian)、面包车(Van)、坐着的人(Person Sitting)、汽车(Car)、卡车(Truck…...

4.4. 深拷贝 vs 浅拷贝
文章目录 浅拷贝:对基本数据类型进行值传递,对引用数据类型进行引用传递般的拷贝,此为浅拷贝。深拷贝:对基本数据类型进行值传递,对引用数据类型,创建一个新的对象,并复制其内容,此为…...
网络安全(黑客)自学建议笔记
前言 网络安全,顾名思义,无安全,不网络。现如今,安全行业飞速发展,我们呼吁专业化的 就职人员与大学生 ,而你,认为自己有资格当黑客吗? 本文面向所有信息安全领域的初学者和从业人员…...
Linux CentOS快速安装VNC并开启服务
以下是在 CentOS 上安装并开启 VNC 服务的步骤: 安装 VNC 服务器软件包。运行以下命令: sudo yum install tigervnc-server 输出 $ sudo yum install tigervnc-server Loaded plugins: fastestmirror, langpacks Repository epel is missing name i…...
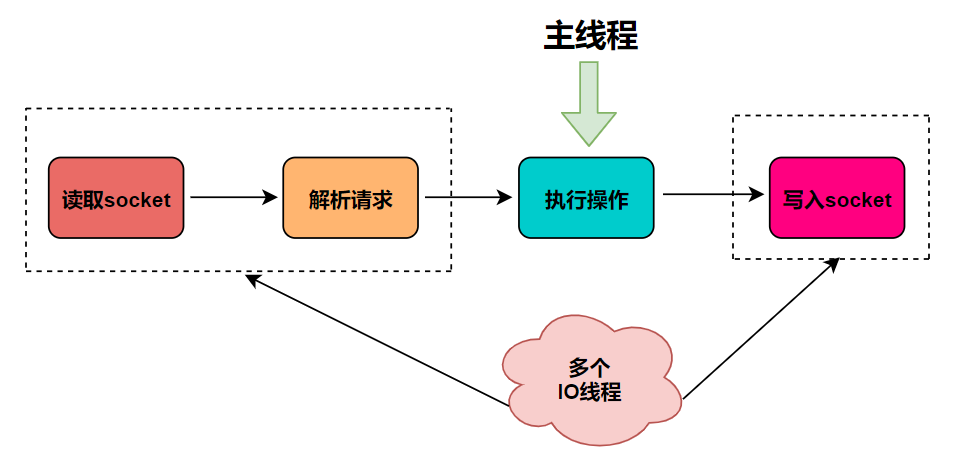
redis到底几个线程?
通常我们说redis是单线程指的是从接收客户端请求->解析请求->读写->响应客户端这整个过程是由一个线程来完成的。这并不意味着redis在任何场景、任何版本下都只有一个线程 为何用单线程处理数据读写? 内存数据储存已经很快了 redis相比于mysql等数据库是…...

mysql修改UUID
mysql修改UUID 问题描述:集群搭建时克隆主服务的镜像导致所有节点的服务UUID都一致,此时在集群中添加节点时会提示UUID冲突报错。 解决方案 1、利用uuid函数生成新的uuid mysql> select uuid(); -------------------------------------- | uuid() …...
NoSQL之redis配置与优化
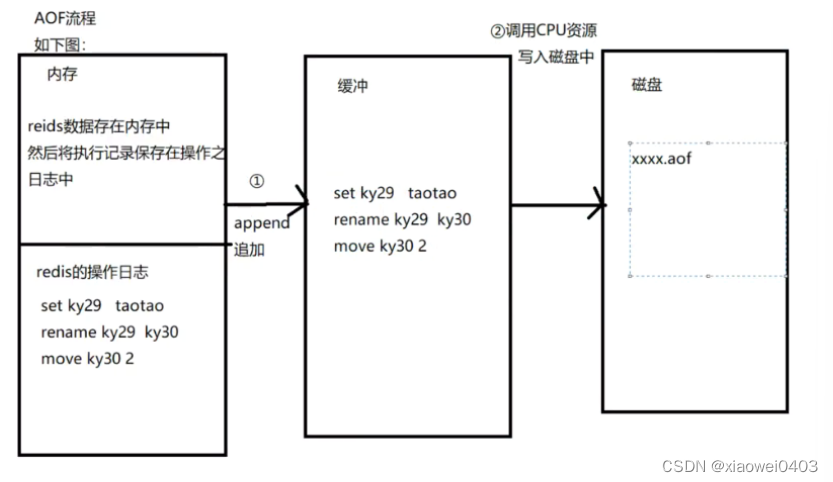
NoSQL之redis配置与优化 高可用持久化功能Redis提供两种方式进行持久化1.触发条件手动触发自动触发 执行流程优缺点缺点:优势AOF出发规则: AOF流程AOF缺陷和优点 NoSQL之redis配置与优化 mysql优化 1线程池优化 2硬件优化 3索引优化 4慢查询优化 5内…...

Python单例模式介绍、使用
一、单例模式介绍 概念:单例模式是一种创建型设计模式,它确保一个类只有一个实例,并提供访问该实例的全局访问点。 功能:单例模式的主要功能是确保在应用程序中只有一个实例存在。 优势: 节省系统资源:由…...
1334179-85-9,BTTAA,是各种化学生物学实验中生物偶联所需
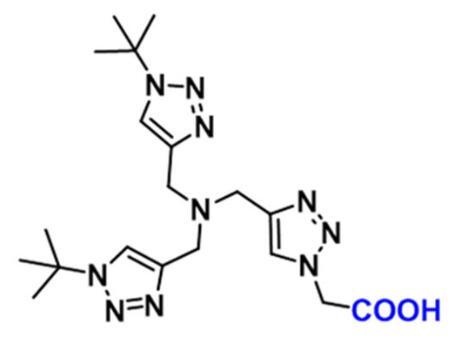
资料编辑|陕西新研博美生物科技有限公司小编MISSwu BTTAA试剂 | 基础知识概述(部分): 中文名称:2-[4-({双[(1-叔丁基-1H-1,2,3-三唑-4-基)甲基]氨基}甲基)-1H-1,2,3-三唑-1-基]乙酸 英文名称:BTTAA CAS号:1334179-8…...
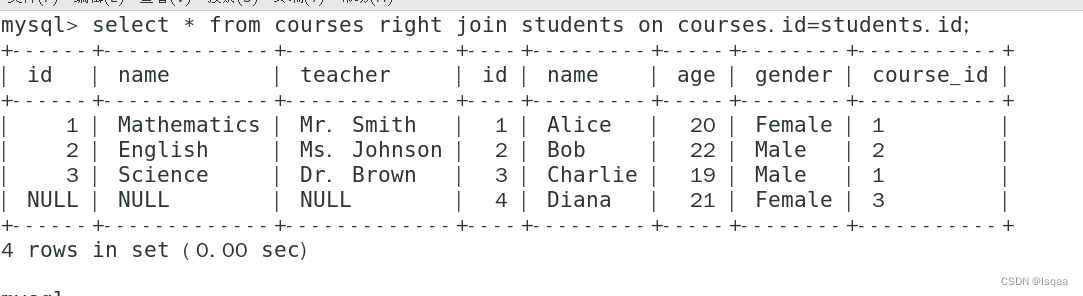
Linux系统中的SQL语句
本节主要学习,SQL语句的语句类型,数据库操作,数据表操作,和数据操作等。 文章目录 一、SQL语句类型 DDL DML DCL DQL 二、数据库操作 1.查看 2.创建 默认字符集 指定字符集 3.进入 4.删除 5.更改 库名称 字符集 6…...

力扣27 26 283 844 977 移除数组
给你一个数组 nums 和一个值 val,你需要 原地 移除所有数值等于 val 的元素,并返回移除后数组的新长度。 不要使用额外的数组空间,你必须仅使用 O(1) 额外空间并原地修改输入数组。 元素的顺序可以改变。你不需要考虑数组中超出新长度后面的…...

【沐风老师】3DMAX自动材质插件使用方法教程
3DMAX自动材质插件使用方法教程 3DMAX自动材质工具用于在将纹理加载到3dsax中时快速创建简单的材质,并具有一些很酷的材质功能。 这个插件可以根据真正制造商的纹理(通常比例为2:1)快速创建简单的木材材质,并根据板材的长度自动对…...
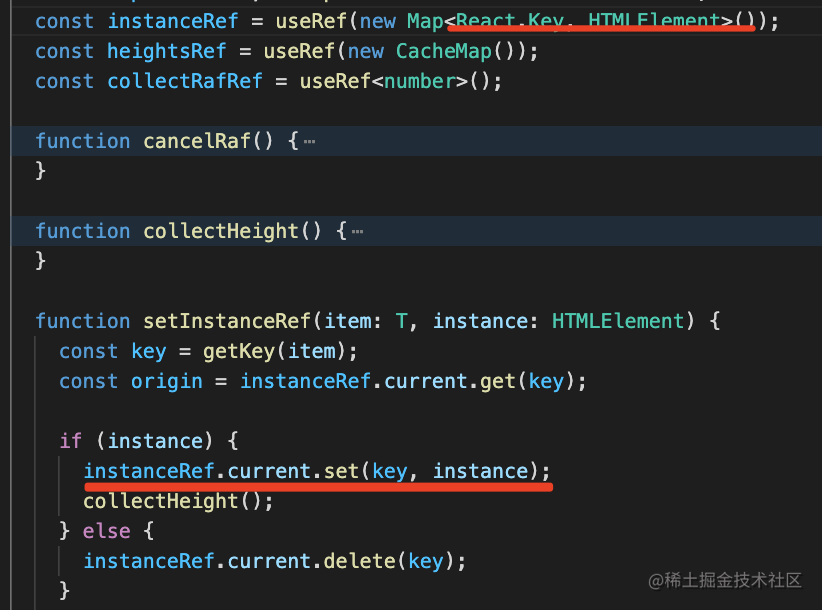
让你 React 组件水平暴增的 5 个技巧
目录 透传 className、style 通过 forwardRef 暴露一些方法 useCallback、useMemo 用 Context 来跨组件传递值 React.Children、React.cloneElement 总结 最近看了一些 Ant Design 的组件源码,学到一些很实用的技巧,这篇文章来分享一下。 首先&am…...

阿里云部署 ChatGLM2-6B 与 langchain+ChatGLM
1.ChatGLM2-6B 部署 更新系统 apt-get update 安装git apt-get install git-lfs git init git lfs install 克隆 ChatGLM2-6B 源码 git clone https://github.com/THUDM/ChatGLM2-6B.git 克隆 chatglm2-6b 模型 #进入目录 cd ChatGLM2-6B #创建目录 mkdir model #进入目录 cd m…...
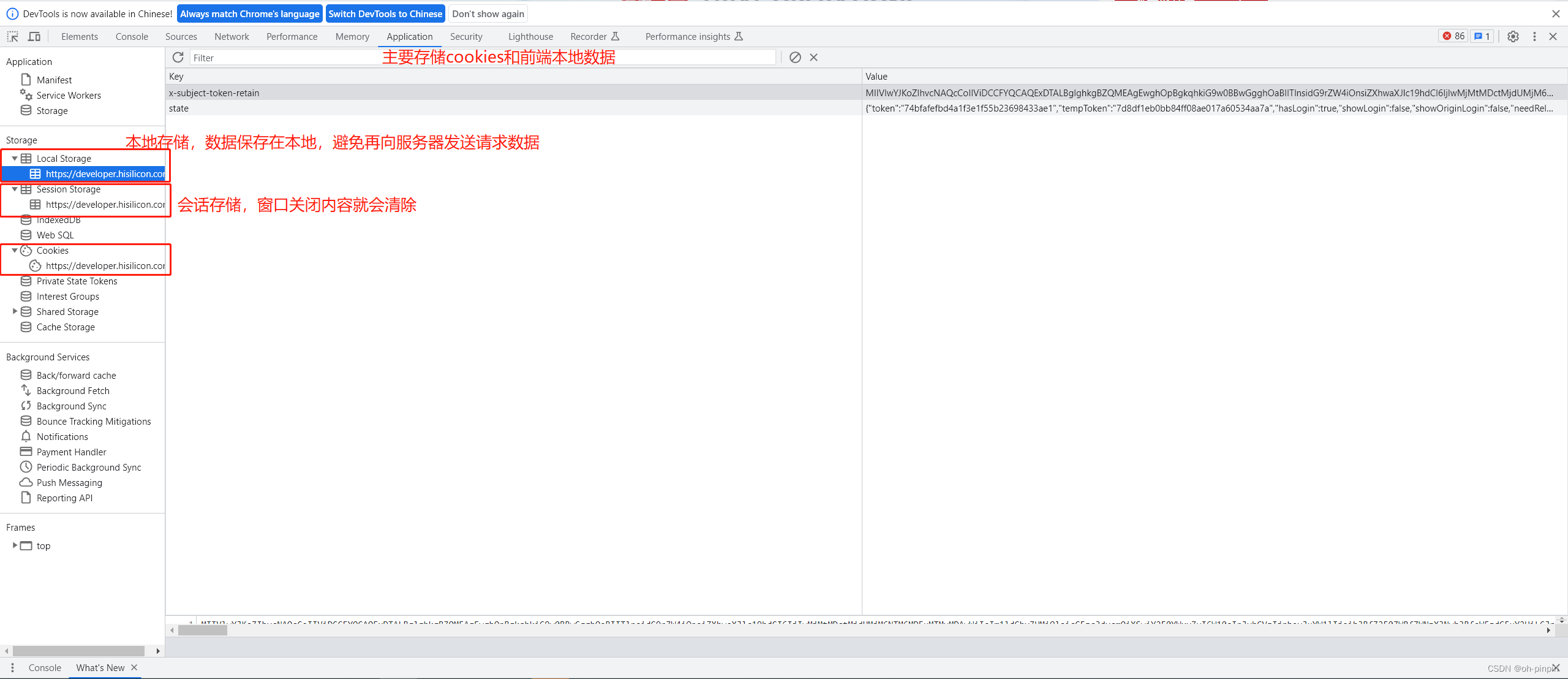
F12开发者工具的简单应用
目录 elements 元素 1、元素的定位和修改 2、UI自动化应用 console 控制台 sources 源代码 network 网络 1、定位问题 2、接口测试 3、弱网测试 performance 性能 memory 存储 application 应用 recorder 记录器 界面展示如下(设置中可以切换中英文&am…...
【 Python 全栈开发 - 人工智能篇 - 45 】决策树与随机森林
文章目录 一、概念与原理1.1 决策树1.1.1 概念1.1.2 原理特征选择分割方法 1.1.3 优点与缺点1.1.4 Python常用决策树算法 1.2 随机森林1.2.1 概念1.2.2 原理1.2.3 优点与缺点1.2.4 Python常用随机森林算法 1.3 决策树与随机森林的比较1.3.1 相同之处1.3.2 不同之处 二、决策树算…...
)
保姆级教程:在ROS2 Humble/Foxy的Gazebo中配置RGB-D相机(附解决点云颜色/坐标问题)
ROS2 Humble/Foxy中Gazebo深度相机仿真全攻略:从配置到点云问题解决在机器人仿真开发中,深度相机(RGB-D)是不可或缺的传感器之一。它能够同时提供彩色图像和深度信息,为SLAM、物体识别、避障等任务提供关键数据支持。本…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

AI时代程序员职业发展与个人创业可行性研究报告
一、行业宏观变革(2026核心趋势数据佐证) 1.1 开发范式已彻底重构(行业不可逆拐点) 2026年正式进入AI Agent智能体开发时代,传统CRUD编码价值持续崩塌。 核心权威数据: Gartner预测:2026年75%企…...

Java数组工具类实战:设计不可实例化的静态工具类
实现一个工具类 MathUtils,满足以下要求: 1. 所有方法均为静态,且该类不能从外部实例化(提示:使用私有构造器)。 2. 提供三个静态方法:- maxArray(int[] arr):返回较大值;…...
)
别再只测accuracy!DeepSeek集成测试必须监控的5个隐性指标(P99首token延迟、context bleed率、tool-call schema漂移)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试的核心范式演进 DeepSeek大模型的工程化落地对集成测试提出了全新挑战:传统基于接口响应码与字段校验的测试范式已难以覆盖语义一致性、推理链鲁棒性、上下文敏感度等高阶质…...

WebSocket实时通信架构进阶:Room、命名空间与集群部署
WebSocket实时通信架构进阶:Room、命名空间与集群部署 作者:Crown_22 | AI Agent & Hermes Agent 桌面程序开发者 前言 WebSocket已经成为实时应用的标准技术,但大多数教程只停留在"建立连接、发送消息"的基础阶段。在生产环境中,你需要处理Room管理、命名空…...

全球无障碍宣传日:iOS 26 辅助功能大升级,这些实用小功能你用过吗?
辅助功能发展与升级很多人对辅助功能的印象还停留在 "小白点",但随着 iPhone 进入全面屏时代,它逐渐变得陌生。实际上,Apple 每年都会为其增添功能,方便身体有障人士使用 iPhone。而且,这些功能不仅惠及有障…...

AWS DevOps Agent 完全指南
AWS DevOps Agent 是 AWS 推出的前沿 AI 运维代理,自主调查和解决事件、持续预防故障、提升系统可靠性。本文档覆盖从原理到实战的全生命周期管理。 一、定位与价值 一句话定义 AWS DevOps Agent = AI 驱动的 SRE 队友,724 自主调查告警、定位根因、生成修复方案、预防未来…...

原神私服新纪元:KCN-GenshinServer图形化服务端全功能解析
原神私服新纪元:KCN-GenshinServer图形化服务端全功能解析 【免费下载链接】KCN-GenshinServer 基于GC制作的原神一键GUI多功能服务端。 项目地址: https://gitcode.com/gh_mirrors/kc/KCN-GenshinServer 你是否曾想过拥有一个完全由自己掌控的提瓦特大陆&am…...
)
从单体到事件驱动的生死跃迁:DeepSeek架构委员会认证的6阶段迁移路线图(含风险热力图与回滚触发阈值表)
更多请点击: https://codechina.net 第一章:从单体到事件驱动的生死跃迁:DeepSeek架构委员会认证的6阶段迁移路线图(含风险热力图与回滚触发阈值表) 向事件驱动架构(EDA)演进不是功能迭代&…...