基于Kitti数据集的智能驾驶目标检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于Kitti数据集的智能驾驶目标检测系统可用于日常生活中检测与定位行人(Pedestrian)、面包车(Van)、坐着的人(Person Sitting)、汽车(Car)、卡车(Truck)、骑自行车的人(Cyclist)、有轨电车(Tram)以及其他目标(Misc),利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检测模型训练数据集,使用Pysdie6库来搭建页面展示系统,同时支持ONNX、PT等模型作为权重模型的输出。本系统支持的功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;摄像头的上传、检测、可视化结果展示与结束检测;已检测目标列表、位置信息;前向推理用时。另外本系统同时支持原始图像与检测结果图像的同时展示,原始视频与检测结果视频的同时展示。本博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。

基本介绍
近年来,机器学习和深度学习取得了较大的发展,深度学习方法在检测精度和速度方面与传统方法相比表现出更良好的性能。YOLOv5是单阶段目标检测算法YOLO的第五代,根据实验得出结论,其在速度与准确性能方面都有了明显提升,开源的代码可见https://github.com/ultralytics/yolov5。因此本博文利用YOLOv5检测算法实现一种基于Kitti数据集的智能驾驶目标检测系统,再搭配上Pyside6库写出界面系统,完成目标检测识别页面的开发。注意到YOLO系列算法的最新进展已有YOLOv6、YOLOv7、YOLOv8等算法,将本系统中检测算法替换为最新算法的代码也将在后面发布,欢迎关注收藏。
环境搭建
(1)下载完整文件到自己电脑上,然后使用cmd打开到文件目录
(2)利用Conda创建环境(Anacodna),conda create -n yolo5 python=3.8 然后安装torch和torchvision(pip install torch1.10.0+cu113 torchvision0.11.0+cu113 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna.tsinghua.edu.cn/simple)其中-i https://pypi.tuna.tsinghua.edu.cn/simple代表使用清华源,这行命令要求nvidia-smi显示的CUDA版本>=11.3,最后安装剩余依赖包使用:pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple


(3)安装Pyside6库 pip install pyside6==6.3 -i https://pypi.tuna.tsinghua.edu.cn/simple

(4)对于windows系统下的pycocotools库的安装:pip install pycocotools-windows -i https://pypi.tuna.tsinghua.edu.cn/simple
界面及功能展示
下面给出本博文设计的软件界面,整体界面简洁大方,大体功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;已检测目标列表、位置信息;前向推理用时。希望大家可以喜欢,初始界面如下图:

模型选择与初始化
用户可以点击模型权重选择按钮上传训练好的模型权重,训练权重格式可为.pt、.onnx以及。engine等,之后再点击模型权重初始化按钮可实现已选择模型初始化信息的设置。


置信分与IOU的改变
在Confidence或IOU下方的输入框中改变值即可同步改变滑动条的进度,同时改变滑动条的进度值也可同步改变输入框的值;Confidence或IOU值的改变将同步到模型里的配置,将改变检测置信度阈值与IOU阈值。
图像选择、检测与导出
用户可以点击选择图像按钮上传单张图片进行检测与识别。

再点击图像检测按钮可完成输入图像的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

再点击检测结果展示按钮可在系统左下方显示输入图像检测的结果,系统将显示识别出图片中的目标的类别、位置和置信度信息。

点击图像检测结果导出按钮即可导出检测后的图像,在保存栏里输入保存的图片名称及后缀即可实现检测结果图像的保存。

点击结束图像检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
视频选择、检测与导出
用户可以点击选择视频按钮上传视频进行检测与识别,之后系统会将视频的第一帧输入到系统界面的左上方显示。

再点击视频检测按钮可完成输入视频的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击暂停视频检测按钮即可实现输入视频的暂停,此时按钮变为继续视频检测,输入视频帧与帧检测结果会保留在系统界面,可点击下拉目标框选择已检测目标的坐标位置信息,再点击继续视频检测按钮即可实现输入视频的检测。
点击视频检测结果导出按钮即可导出检测后的视频,在保存栏里输入保存的图片名称及后缀即可实现检测结果视频的保存。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
摄像头打开、检测与结束
用户可以点击打开摄像头按钮来打开摄像头设备进行检测与识别,之后系统会将摄像头图像输入到系统界面的左上方显示。

再点击摄像头检测按钮可完成输入摄像头的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频或打开摄像按钮来上传图像、视频或打开摄像头。
算法原理介绍
本系统采用了基于深度学习的单阶段目标检测算法YOLOv5,相比于YOLOv3和YOLOv4,YOLOv5在检测精度和速度上都有很大的提升。YOLOv5算法的核心思想是将目标检测问题转化为一个回归问题,通过直接预测物体中心点的坐标来代替Anchor框。此外,YOLOv5使用SPP(Spatial Pyramid Pooling)的特征提取方法,这种方法可以在不增加计算量的情况下,有效地提取多尺度特征,提高检测性能。YOLOv5s模型的整体结构如下图所示。

YOLOv5网络结构是由Input、Backbone、Neck、Prediction组成。YOLOv5的Input部分是网络的输入端,采用Mosaic数据增强方式,对输入数据随机裁剪,然后进行拼接。Backbone是YOLOv5提取特征的网络部分,特征提取能力直接影响整个网络性能。在特征提取阶段,YOLOv5使用CSPNet(Cross Stage Partial Network)结构,它将输入特征图分为两部分,一部分通过一系列卷积层进行处理,另一部分直接进行下采样,最后将这两部分特征图进行融合。这种设计使得网络具有更强的非线性表达能力,可以更好地处理目标检测任务中的复杂背景和多样化物体。在Neck阶段使用连续的卷积核C3结构块融合特征图。在Prediction阶段,模型使用结果特征图预测目标的中心坐标与尺寸信息。博主觉得YOLOv5不失为一种目标检测的高性能解决方案,能够以较高的准确率对目标进行分类与定位。当然现在YOLOv6、YOLOv7、YOLOv8等算法也在不断提出和改进,后续博主也会将这些算法融入到本系统中,敬请期待。
数据集介绍
本系统使用的Kitti数据集标注了行人(Pedestrian)、面包车(Van)、坐着的人(Person Sitting)、汽车(Car)、卡车(Truck)、骑自行车的人(Cyclist)、有轨电车(Tram)以及其他目标(Misc)这八个类别,数据集总计7481张图片。该数据集中类别都有大量的旋转和不同的光照条件,有助于训练出更加鲁棒的检测模型。本文实验的Kitti检测识别数据集包含训练集6000张图片,验证集1481张图片,选取部分数据部分样本数据集如下图所示。由于YOLOv5算法对输入图片大小有限制,需要将所有图片调整为相同的大小。为了在不影响检测精度的情况下尽可能减小图片的失真,我们将所有图片调整为640x640的大小,并保持原有的宽高比例。此外,为了增强模型的泛化能力和鲁棒性,我们还使用了数据增强技术,包括随机旋转、缩放、裁剪和颜色变换等,以扩充数据集并减少过拟合风险。

关键代码解析
本系统的深度学习模型使用PyTorch实现,基于YOLOv5算法进行目标检测。在训练阶段,我们使用了预训练模型作为初始模型进行训练,然后通过多次迭代优化网络参数,以达到更好的检测性能。在训练过程中,我们采用了学习率衰减和数据增强等技术,以增强模型的泛化能力和鲁棒性。
在测试阶段,我们使用了训练好的模型来对新的图片和视频进行检测。通过设置阈值,将置信度低于阈值的检测框过滤掉,最终得到检测结果。同时,我们还可以将检测结果保存为图片或视频格式,以便进行后续分析和应用。本系统基于YOLOv5算法,使用PyTorch实现。代码中用到的主要库包括PyTorch、NumPy、OpenCV、PyQt等。


Pyside6界面设计
Pyside6是Python语言的GUI编程解决方案之一,可以快速地为Python程序创建GUI应用。在本博文中,我们使用Pyside6库创建一个图形化界面,为用户提供简单易用的交互界面,实现用户选择图片、视频进行目标检测。
我们使用Qt Designer设计图形界面,然后使用Pyside6将设计好的UI文件转换为Python代码。图形界面中包含多个UI控件,例如:标签、按钮、文本框、多选框等。通过Pyside6中的信号槽机制,可以使得UI控件与程序逻辑代码相互连接。
实验结果与分析
在实验结果与分析部分,我们使用精度和召回率等指标来评估模型的性能,还通过损失曲线和PR曲线来分析训练过程。在训练阶段,我们使用了前面介绍的Kitti数据集进行训练,使用了YOLOv5算法对数据集训练,总计训练了300个epochs。在训练过程中,我们使用tensorboard记录了模型在训练集和验证集上的损失曲线。从下图可以看出,随着训练次数的增加,模型的训练损失和验证损失都逐渐降低,说明模型不断地学习到更加精准的特征。在训练结束后,我们使用模型在数据集的验证集上进行了评估,得到了以下结果。

下图展示了我们训练的YOLOv5模型在验证集上的PR曲线,从图中可以看出,模型取得了较高的召回率和精确率,整体表现良好。

下图展示了本博文在使用YOLOv5模型对Kitti数据集进行训练时候的Mosaic数据增强图像。


综上,本博文训练得到的YOLOv5模型在数据集上表现良好,具有较高的检测精度和鲁棒性,可以在实际场景中应用。另外本博主对整个系统进行了详细测试,最终开发出一版流畅的高精度目标检测系统界面,就是本博文演示部分的展示,完整的UI界面、测试图片视频、代码文件等均已打包上传,感兴趣的朋友可以关注我私信获取。
其他基于深度学习的目标检测系统如西红柿、猫狗、山羊、野生目标、烟头、二维码、头盔、交警、野生动物、野外烟雾、人体摔倒识别、红外行人、家禽猪、苹果、推土机、蜜蜂、打电话、鸽子、足球、奶牛、人脸口罩、安全背心、烟雾检测系统等有需要的朋友关注我,从博主其他视频中获取下载链接。
完整项目目录如下所示:

相关文章:
基于Kitti数据集的智能驾驶目标检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于Kitti数据集的智能驾驶目标检测系统可用于日常生活中检测与定位行人(Pedestrian)、面包车(Van)、坐着的人(Person Sitting)、汽车(Car)、卡车(Truck…...

4.4. 深拷贝 vs 浅拷贝
文章目录 浅拷贝:对基本数据类型进行值传递,对引用数据类型进行引用传递般的拷贝,此为浅拷贝。深拷贝:对基本数据类型进行值传递,对引用数据类型,创建一个新的对象,并复制其内容,此为…...
网络安全(黑客)自学建议笔记
前言 网络安全,顾名思义,无安全,不网络。现如今,安全行业飞速发展,我们呼吁专业化的 就职人员与大学生 ,而你,认为自己有资格当黑客吗? 本文面向所有信息安全领域的初学者和从业人员…...
Linux CentOS快速安装VNC并开启服务
以下是在 CentOS 上安装并开启 VNC 服务的步骤: 安装 VNC 服务器软件包。运行以下命令: sudo yum install tigervnc-server 输出 $ sudo yum install tigervnc-server Loaded plugins: fastestmirror, langpacks Repository epel is missing name i…...
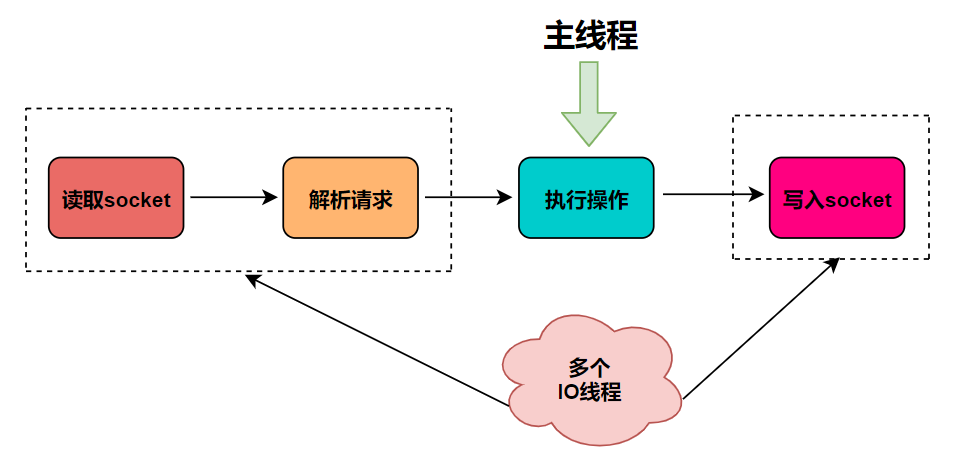
redis到底几个线程?
通常我们说redis是单线程指的是从接收客户端请求->解析请求->读写->响应客户端这整个过程是由一个线程来完成的。这并不意味着redis在任何场景、任何版本下都只有一个线程 为何用单线程处理数据读写? 内存数据储存已经很快了 redis相比于mysql等数据库是…...

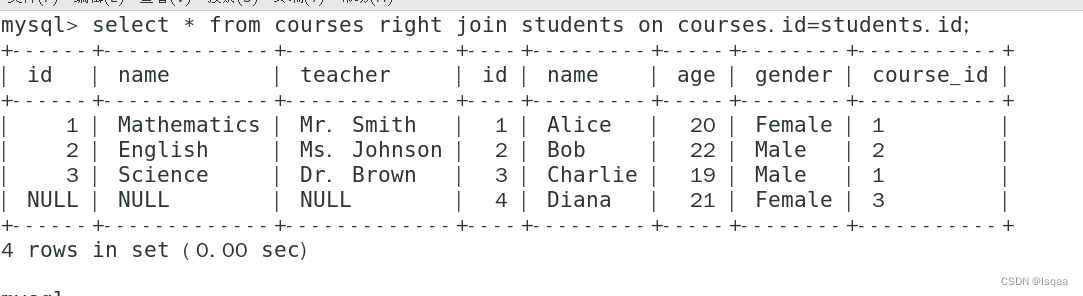
mysql修改UUID
mysql修改UUID 问题描述:集群搭建时克隆主服务的镜像导致所有节点的服务UUID都一致,此时在集群中添加节点时会提示UUID冲突报错。 解决方案 1、利用uuid函数生成新的uuid mysql> select uuid(); -------------------------------------- | uuid() …...
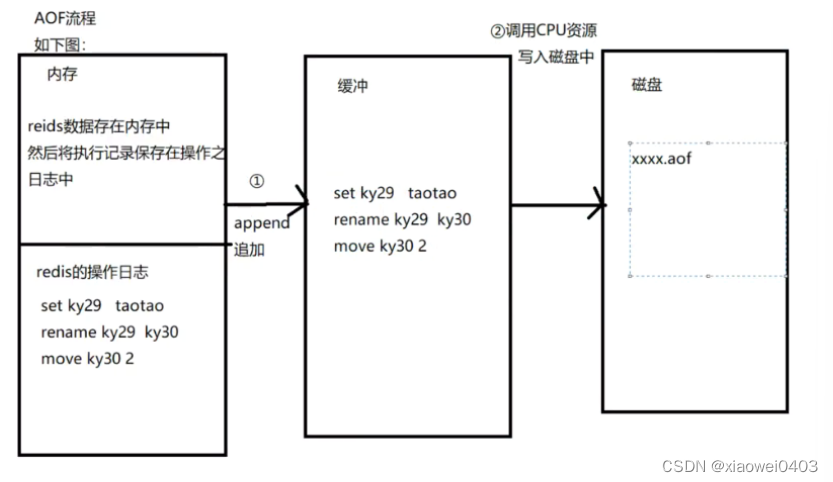
NoSQL之redis配置与优化
NoSQL之redis配置与优化 高可用持久化功能Redis提供两种方式进行持久化1.触发条件手动触发自动触发 执行流程优缺点缺点:优势AOF出发规则: AOF流程AOF缺陷和优点 NoSQL之redis配置与优化 mysql优化 1线程池优化 2硬件优化 3索引优化 4慢查询优化 5内…...

Python单例模式介绍、使用
一、单例模式介绍 概念:单例模式是一种创建型设计模式,它确保一个类只有一个实例,并提供访问该实例的全局访问点。 功能:单例模式的主要功能是确保在应用程序中只有一个实例存在。 优势: 节省系统资源:由…...
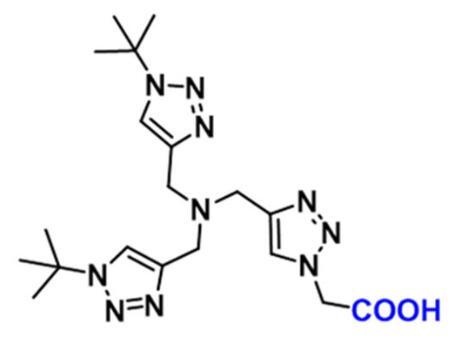
1334179-85-9,BTTAA,是各种化学生物学实验中生物偶联所需
资料编辑|陕西新研博美生物科技有限公司小编MISSwu BTTAA试剂 | 基础知识概述(部分): 中文名称:2-[4-({双[(1-叔丁基-1H-1,2,3-三唑-4-基)甲基]氨基}甲基)-1H-1,2,3-三唑-1-基]乙酸 英文名称:BTTAA CAS号:1334179-8…...
Linux系统中的SQL语句
本节主要学习,SQL语句的语句类型,数据库操作,数据表操作,和数据操作等。 文章目录 一、SQL语句类型 DDL DML DCL DQL 二、数据库操作 1.查看 2.创建 默认字符集 指定字符集 3.进入 4.删除 5.更改 库名称 字符集 6…...

力扣27 26 283 844 977 移除数组
给你一个数组 nums 和一个值 val,你需要 原地 移除所有数值等于 val 的元素,并返回移除后数组的新长度。 不要使用额外的数组空间,你必须仅使用 O(1) 额外空间并原地修改输入数组。 元素的顺序可以改变。你不需要考虑数组中超出新长度后面的…...

【沐风老师】3DMAX自动材质插件使用方法教程
3DMAX自动材质插件使用方法教程 3DMAX自动材质工具用于在将纹理加载到3dsax中时快速创建简单的材质,并具有一些很酷的材质功能。 这个插件可以根据真正制造商的纹理(通常比例为2:1)快速创建简单的木材材质,并根据板材的长度自动对…...
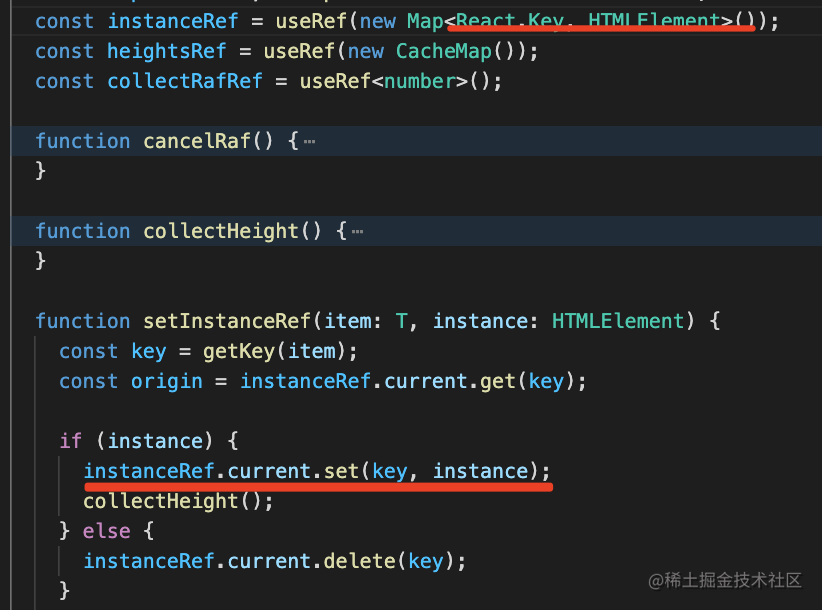
让你 React 组件水平暴增的 5 个技巧
目录 透传 className、style 通过 forwardRef 暴露一些方法 useCallback、useMemo 用 Context 来跨组件传递值 React.Children、React.cloneElement 总结 最近看了一些 Ant Design 的组件源码,学到一些很实用的技巧,这篇文章来分享一下。 首先&am…...

阿里云部署 ChatGLM2-6B 与 langchain+ChatGLM
1.ChatGLM2-6B 部署 更新系统 apt-get update 安装git apt-get install git-lfs git init git lfs install 克隆 ChatGLM2-6B 源码 git clone https://github.com/THUDM/ChatGLM2-6B.git 克隆 chatglm2-6b 模型 #进入目录 cd ChatGLM2-6B #创建目录 mkdir model #进入目录 cd m…...
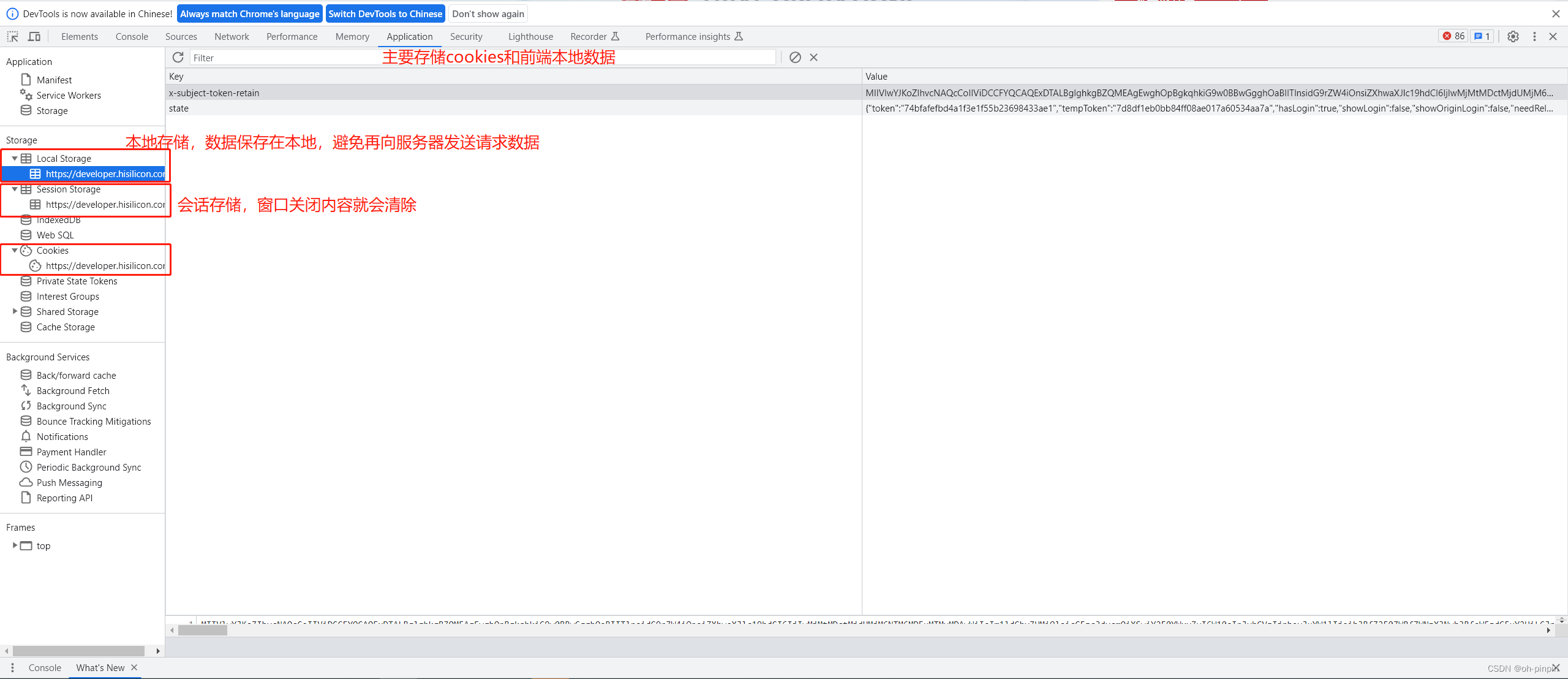
F12开发者工具的简单应用
目录 elements 元素 1、元素的定位和修改 2、UI自动化应用 console 控制台 sources 源代码 network 网络 1、定位问题 2、接口测试 3、弱网测试 performance 性能 memory 存储 application 应用 recorder 记录器 界面展示如下(设置中可以切换中英文&am…...
【 Python 全栈开发 - 人工智能篇 - 45 】决策树与随机森林
文章目录 一、概念与原理1.1 决策树1.1.1 概念1.1.2 原理特征选择分割方法 1.1.3 优点与缺点1.1.4 Python常用决策树算法 1.2 随机森林1.2.1 概念1.2.2 原理1.2.3 优点与缺点1.2.4 Python常用随机森林算法 1.3 决策树与随机森林的比较1.3.1 相同之处1.3.2 不同之处 二、决策树算…...
SpringBoot集成kafka全面实战
本文是SpringBootKafka的实战讲解,如果对kafka的架构原理还不了解的读者,建议先看一下《大白话kafka架构原理》、《秒懂kafka HA(高可用)》两篇文章。 一、生产者实践 普通生产者 带回调的生产者 自定义分区器 kafka事务提交…...

新建Git仓库,将本地文件上传至仓库
1、新建仓库,勾选初始化仓库 2、复制仓库链接 3、打开本地文件目录 右键选择 Git Bash Here 打开命令窗口 4、依次按照下面的步骤(*如果报错,看原目录下是否存在 .git 需要删除) // 生成git文件 git init // 把文件加入暂存区 g…...

算法练习——力扣随笔【LeetCode】【C++】
文章目录 LeetCode 练习随笔力扣上的题目和 OJ题目相比不同之处?定义问题排序问题统计问题其他 LeetCode 练习随笔 做题环境 C 中等题很值,收获挺多的 不会的题看题解,一道题卡1 h ,多来几道,时间上耗不起。 力扣上的题…...

web服务器(Tomcat)
目录 一、web服务器 1. 常见web服务器 2. web服务器简介 二、 Apache Tomcat服务器 1. Tomcat服务器简介 2. Tomcat服务器基本使用 3. 启动tomcat常见问题 (1)启动tomcat控制台乱码 (2)启动tomcat闪退问题 (…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...

AI写的论文双率如何压到20%以下?这几款工具实测有效
毕业季、投稿季用AI写论文已经成为不少人的高效选择,但查重率飘红、AIGC疑似率超标两大问题,让很多人犯了难。2026年学术检测标准持续收紧,知网、维普及主流AIGC检测系统同步上线双检规则,两项指标均控制在20%以下才符合基本提交要…...

2026 文章代码高亮方案选型
将基于 Prism.js 或 Highlight.js 的传统高亮方案与基于 Shiki 的现代化高亮方案进行对比,其核心区别在于底层解析原理的不同(正则表达式 vs. TextMate 语法树)。 以下是两种方案的底层原理、各自优缺点、核心对比矩阵以及适用场景的详细分析…...

defx.nvim 安装与配置完全教程:从零开始搭建高效文件管理系统 [特殊字符]
defx.nvim 安装与配置完全教程:从零开始搭建高效文件管理系统 🚀 【免费下载链接】defx.nvim :file_folder: The dark powered file explorer implementation for neovim/Vim8 项目地址: https://gitcode.com/gh_mirrors/de/defx.nvim defx.nvim …...

构建智能音乐档案:SoundCloud Downloader 的技术架构与实现哲学
构建智能音乐档案:SoundCloud Downloader 的技术架构与实现哲学 【免费下载链接】scdl Soundcloud Music Downloader 项目地址: https://gitcode.com/gh_mirrors/sc/scdl 在流媒体音乐主导的时代,音乐爱好者面临着一种矛盾:我们享受着…...

鸿蒙HarmonyOS 5与Unity跨运行时通信实战指南
1. 这不是“调个API”那么简单:为什么鸿蒙Unity通信总在临门一脚卡住我第一次把Unity打包的AR模块塞进HarmonyOS 5 App里时,信心满满——毕竟文档里写着“支持JS/ArkTS调用Native能力”,Unity也标榜“跨平台通用”。结果呢?App一启…...
运营管理与服务保障平台建设方案)
低空旅游观光与低空通勤(eVTOL)运营管理与服务保障平台建设方案
本方案旨在为eVTOL载具构建集运营管理、空中交通管制、安全保障与乘客服务于一体的数字化平台。通过微服务架构、5G-A融合感知、空域网格化与零信任安全等核心技术,解决高密度飞行中的资源调度与安全冲突问题。目标实现毫秒级冲突解算与15分钟内快速周转,…...

告别Selenium?手把手教你用Playwright录制脚本,5分钟搞定Web自动化测试
5分钟极速上手Playwright脚本录制:零代码实现Web自动化测试当产品经理突然丢给你一个刚上线的电商活动页,要求半小时内完成所有核心链路测试时,传统的手写Selenium脚本显然来不及。作为测试工程师,我最近发现微软开源的Playwright…...

免费解锁八大网盘限速!LinkSwift直链下载助手终极指南
免费解锁八大网盘限速!LinkSwift直链下载助手终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼…...

如何高效使用开源电路仿真工具:CircuitJS1桌面版新手快速入门指南
如何高效使用开源电路仿真工具:CircuitJS1桌面版新手快速入门指南 【免费下载链接】circuitjs1 Standalone (offline) version of the Circuit Simulator with small modifications based on modified NW.js. 项目地址: https://gitcode.com/gh_mirrors/circ/circ…...