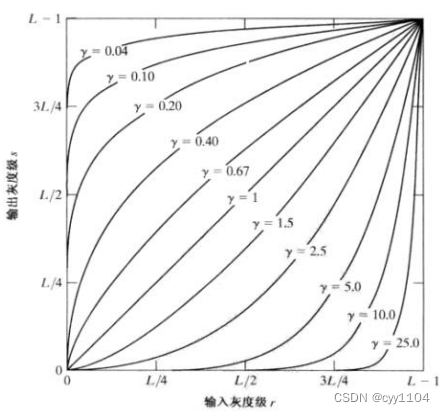
图像滤波器


相关文章:
图像滤波器
图像噪声 • 图像噪声是图像在获取或是传输过程中受到随机信号干扰,妨碍人们对图像理解及分析处理 的信号。 • 图像噪声的产生来自图像获取中的环境条件和传感元器件自身的质量,图像在传输过程中产 生图像噪声的主要因素是所用的传输信道受到了噪声…...

【每日一题】2569. 更新数组后处理求和查询
【每日一题】2569. 更新数组后处理求和查询 2569. 更新数组后处理求和查询题目描述解题思路 2569. 更新数组后处理求和查询 题目描述 给你两个下标从 0 开始的数组 nums1 和 nums2 ,和一个二维数组 queries 表示一些操作。总共有 3 种类型的操作: 操作…...
PLC的高端版本通常具有以下特点:
高速处理能力:高端PLC通常具有更快的处理速度和更高的运行频率,可以处理更复杂的控制逻辑和更多的输入/输出信号。 大容量存储:高端PLC通常具有更大的存储容量,可以保存更多的程序和数据,以满足更复杂的应用需求。 多种…...

Scrum敏捷开发项目管理和产品研发管理培训- Leangoo领歌
Scrum是目前运用最为广泛的敏捷开发方法,是一个轻量级的项目管理和产品研发管理框架。 这是一个两天的实训课程,面向研发管理者、项目经理、产品经理、研发团队等,旨在帮助学员全面系统地学习Scrum和敏捷开发, 帮助企业快速启动敏捷实施。 …...

爬虫小白-如何辨别是否有cookie反爬案例
目录 一、Cookie介绍二、cookie生成来源区分查找三、如何判断是否有cookie反爬四、来自服务器生成的cookie反爬解决方法五、来自js生成的cookie反爬解决方法一、Cookie介绍 先推荐该篇文章简单了解Cookie、Session、Token、JWT1、cookie的类型:会话cookie和持久cookie;其唯一…...

机器人状态估计:robot_localization 功能包简介与安装
机器人状态估计:robot_localization 功能包简介与参数配置 前言功能包简介安装使用ubuntu软件源安装使用源码安装 前言 移动机器人的状态估计需要用到很多传感器,因为对单一的传感器来讲,都存在各自的优缺点,所以需要一种多传感器…...
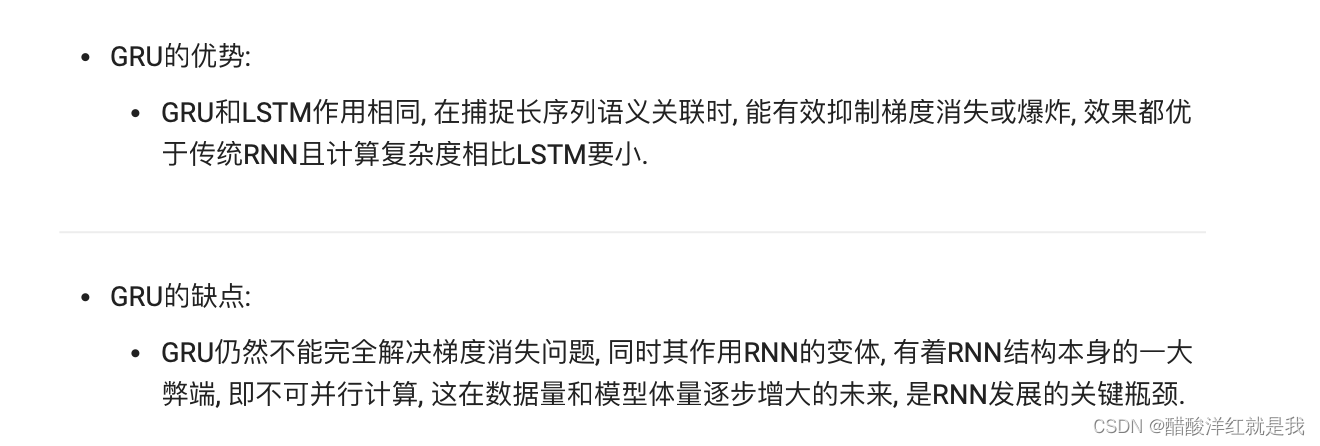
RNN架构解析——GRU模型
目录 GRU模型实现优点和缺点 GRU模型 实现 优点和缺点...

【LeetCode】141.环形链表
题目 给你一个链表的头节点 head ,判断链表中是否有环。 如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置&#…...
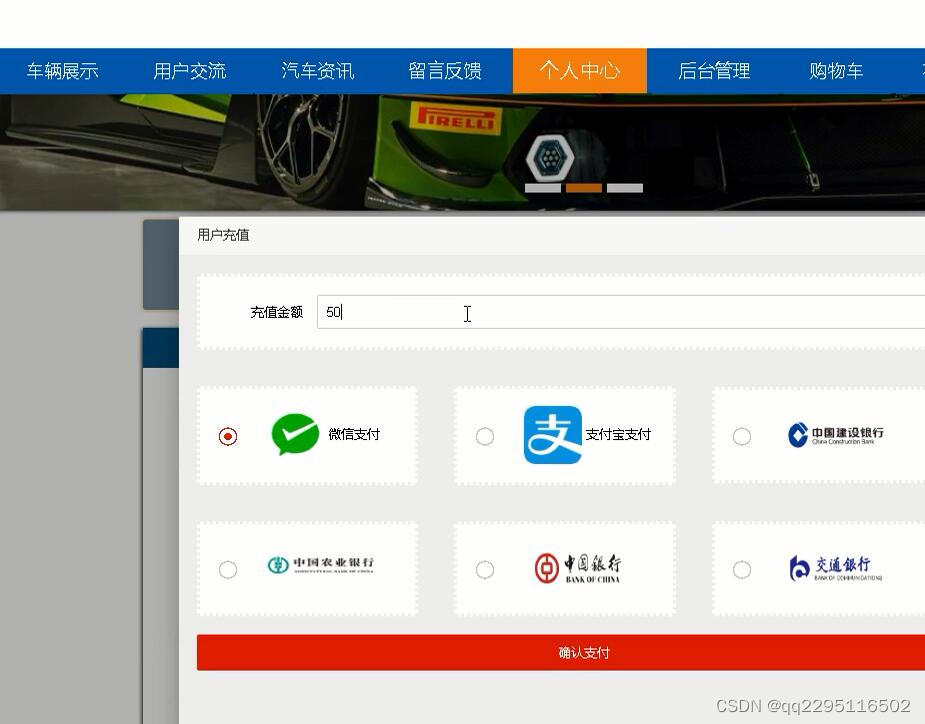
nodejs+vue+elementui汽车销售网站
前端技术:nodejsvueelementui,视图层其实质就是vue页面,通过编写vue页面从而展示在浏览器中,编写完成的vue页面要能够和控制器类进行交互,从而使得用户在点击网页进行操作时能够正常。 可以设置中间件来响应 HTTP 请求。 Express …...

spring boot整合kaptcha验证码
引入依赖 <dependency><groupId>com.github.penggle</groupId><artifactId>kaptcha</artifactId><version>2.3.2</version> </dependency>创建验证码生成配置类 KaptchaConfig.java Configuration public class KaptchaConf…...

【Linux下6818开发板(ARM)】在液晶屏上显示RGB颜色和BMP图片
(꒪ꇴ꒪ ),hello我是祐言博客主页:C语言基础,Linux基础,软件配置领域博主🌍快上🚘,一起学习!送给读者的一句鸡汤🤔:集中起来的意志可以击穿顽石!作者水平很有限,如果发现错误&#x…...

React的hooks---useLayoutEffect
useLayoutEffect 与 useEffect 类似,与 useEffect 在浏览器 layout 和 painting 完成后异步执行 effect 不同的是,它会在浏览器布局 layout 之后,painting 之前同步执行 effect useLayoutEffect 的执行时机对比如下: import Rea…...

北京创业孵化器汇总
北京创业孵化器汇总 1 创客总部实验室技术孵化平台 人工智能 海淀区中关村大街18号B座0909室 2 中孵高科 医药健康 经济技术开发区科创十四街99号D座9层 3 九州众创孵化器 医药健康 大兴区广平大街9号6幢等2幢 4 北京大学人工智能产业化孵化平台 国家级/市级 人工智能 中关村…...

电信软件的过去、现在和未来:推动核心网发展的关键力量
目录 导语:过去:从基础功能到增强服务现在:软件定义网络和智能化运营SDNNFV 未来:5G和物联网的挑战与机遇结束语 导语: 电信软件是支撑电信核心网运营的重要组成部分,它们在过去几十年中经历了巨大的变革。…...

2023年全国程序员薪酬排行天梯榜
文章目录 ⭐️ 2023年全国程序员薪酬排行天梯榜 在过去很长的一段时间内,网上总有一个声音:“大厂裁员”、“程序员内卷严重”、“程序员人员过盛”、“35岁中年危机”、“码农吃的青春饭”、“互联网寒冬” 等等等等。 讲道理,我对这种人为的…...

设计模式-工厂模式
定义 工厂模式是用来创建对象的一种最常用的设计模式,不暴露创建对象的具体逻辑,而是将将逻辑封装在一个函数中,那么这个函数就可以被视为一个工厂 其就像工厂一样重复的产生类似的产品,工厂模式只需要我们传入正确的参数&#…...
HummerRisk V1.3.0 发布
HummerRisk V1.3.0发布: 大家好,HummerRisk 1.3.0和大家见面了,在这个版本中我们继续在多云接入管理、多云检测方式、云资源态势方面提供新的能力,并增加了新的镜像仓库支持类型,并优化了云的区域选择、优化规则组内容…...
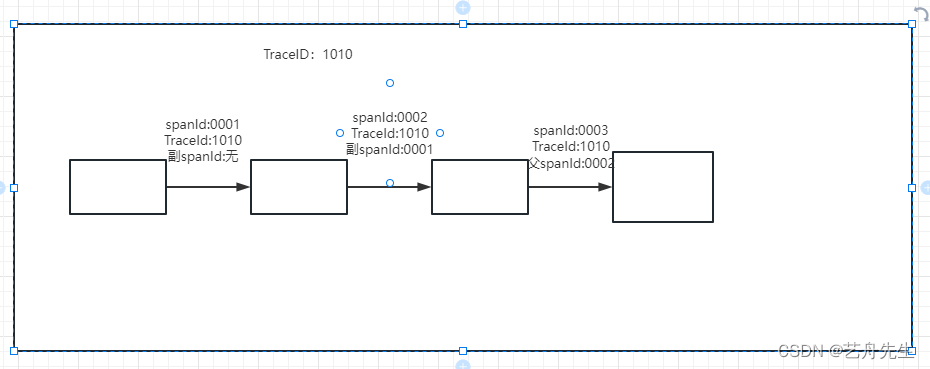
SkyWalking链路追踪中Trace概念以及Trace与span的关系
基本概念 在SkyWalking链路追踪中,Trace(追踪)是指一个请求或者一个操作从开始到结束的完整路径。它涵盖了分布式系统中所有相关组件的调用关系和性能信息。 具体来说,Trace包含了一系列的span(跨度)&…...
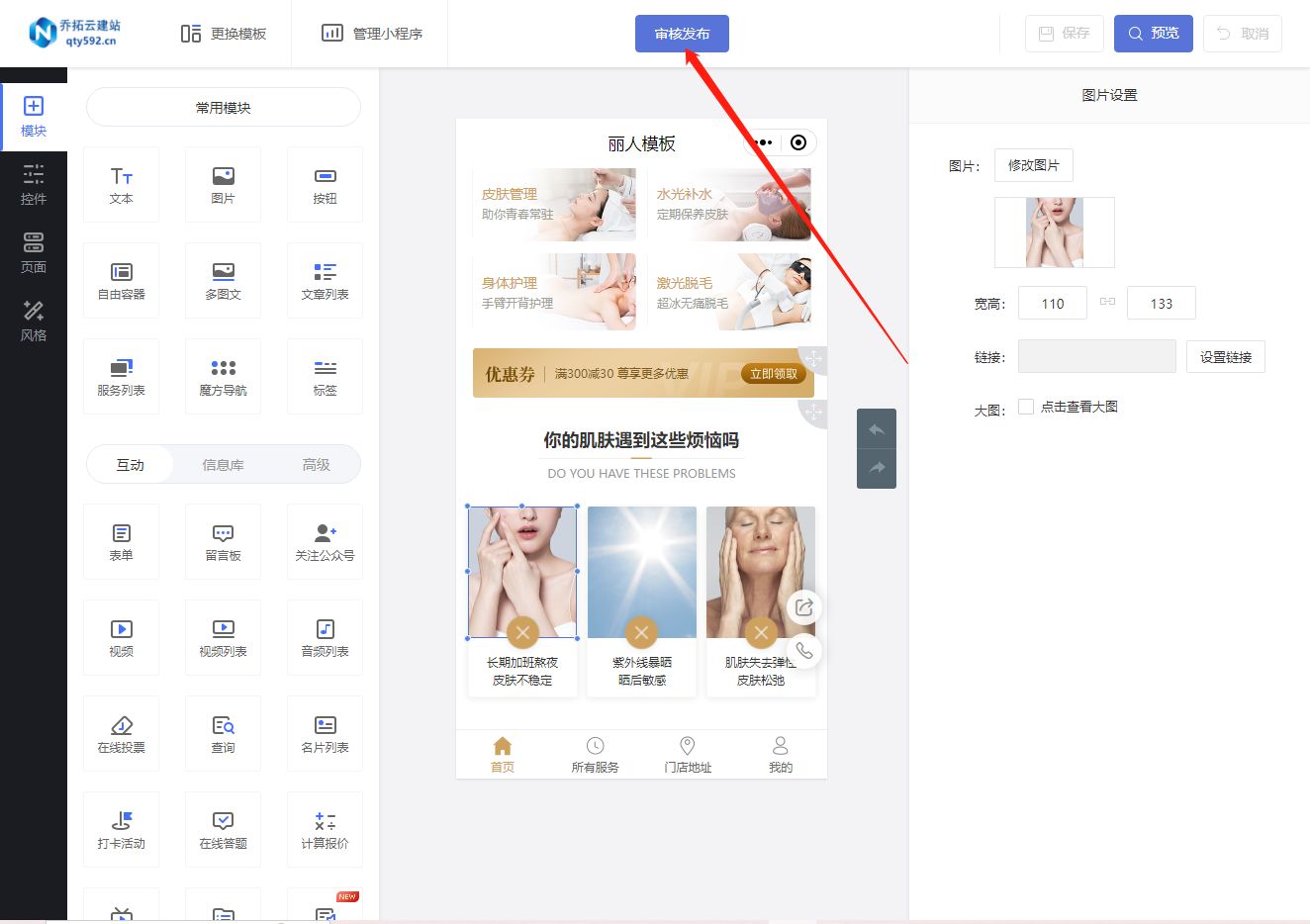
美容店预约小程序制作教程详解
现在,制作一个专属于美容店的预约小程序不再需要编程经验,通过乔拓云网提供的后台管理系统,你可以轻松地完成整个制作过程。下面,我将为你详细介绍如何DIY一个美容店预约小程序。 首先,登录乔拓云网的后台管理系统&…...

什么是内存泄漏及如何防护内存泄漏
目录 前言 什么是内存泄漏示例一示例二特殊版本 总结/结尾 前言 最近阅读量很低啊( ≧Д≦) 什么是内存泄漏 内存泄漏(Memory Leak)指在程序运行过程中,分配的内存空间在不再使用后未被正确释放或回收,导致这部分内存…...
(java)(4.2号补充下,闪闪改改))
暑期实习面经记录(十四)(java)(4.2号补充下,闪闪改改)
本人最近面的被问的比较多的java八股先完成再完美1.如何设计一个扣减库存或者说秒杀抢券系统2.最近问这个问的比较多多线程->线程池->并发安全->场景2.锁->synconiezed,retranlock->可重入吗->怎么实现的2.1读写锁 怎么实现的;AQS底层;…...

CMake 导言
为什么选择 CMake 在掌握 Linux 基础后,我们知道一个项目通常由多个源文件组成。想要构建这个项目,就需要按照一定的规则对源文件进行编译和链接,而这些规则通常需要在 Makefile 中定义。 但随着项目体量增大,手写 Makefile 会变得…...

程序员副业指南:从技术到收入的10种变现路径
CSDN程序员副业图谱技术文章大纲副业方向概览技术博客与内容创作:分享技术经验、教程、行业见解在线教育与课程开发:录制视频课程、开设直播讲座开源项目与工具开发:参与或主导开源项目,开发实用工具自由职业与远程工作࿱…...

【应答器】基于matlab应答器特殊区段信息包报文编码仿真【含Matlab源码 15258期】
💥💥💥💥💥💥💞💞💞💞💞💞💞💞欢迎来到海神之光博客之家💞💞💞Ὁ…...

论文AIGC全红99%怎么救?2026实测Gemini去痕术:3组指令集联合3大工具,稳稳拉回10%安全线
视角重构,打破“平铺直叙”的机械感 AI生成的最大特征是“正确但平庸的上帝视角”。要ai降ai,第一步不是改词,而是强行植入一个具有批判性的“人类观察者”视角,迫使模型重组叙事逻辑。 核心原理:通过引入“辩证法”…...

01_第一篇:到底什么是嵌入式芯片?与通用CPU_GPU_DSP的核心区别
嵌入式芯片入门:到底什么是嵌入式芯片?与通用CPU/GPU/DSP的核心区别 引言:智能时代的核心基石,嵌入式芯片的无处不在 在万物互联的智能时代,我们的生活早已被无数“隐形大脑”环绕:清晨唤醒你的智能手环、出…...

Kandinsky-5.0-I2V-Lite-5s实战:基于Dify平台构建无代码视频生成应用
Kandinsky-5.0-I2V-Lite-5s实战:基于Dify平台构建无代码视频生成应用 1. 引言:让图片动起来的零门槛方案 最近遇到不少朋友在问:有没有什么简单的方法,能让静态图片变成动态视频?传统方案要么需要专业视频编辑技能&a…...

从模电理论到商用落地,应届生必做的无线充项目,H 桥 / LC 谐振 + QI 协议全栈详解
很多初学嵌入式的同学、正在准备秋招的电子信息类应届生,都会遇到两个核心困境:一是模电学了 H 桥、LC 谐振,只会背公式做题,根本不知道怎么在真实产品里落地;二是学完单片机只会点灯,写的都是流水账代码&a…...

揭秘JVM创世过程之Call Stub进入Java世界的门票
前言 本文旨在记录近期研读Java源码的学习心得与疑难问题。由于个人理解水平有限,文中内容可能存在疏漏,恳请读者不吝指正。 前情回顾 在揭秘JVM创世过程之两种语言首席外交官JavaCalls,一文中将JVM看作Java世界中一个拥有两种语言的领事馆…...

从 14 万美元支付事故看:AI 写的代码过了所有测试,为什么活不过生产?
我审计过的一家科技公司,曾因一段 AI 生成的异步支付处理代码,遭遇了一场灾难性的生产事故。这段代码完美通过了所有自动化检查、单元测试与集成测试,标注着「All checks passed」被顺利合并到生产环境,最终却触发了竞态条件与重复…...