驱动开发 day4 (led灯组分块驱动)
//编译驱动(注意Makefile的编译到移植到开发板的内核)
make arch=arm
//清除编译生成文件
make clean
//安装驱动
insmod mycdev.ko
//卸载驱动
rmmod mycdev
//编译fun.c 函数(用到交叉工具编译)
arm-linux-gnueabihf-gcc fun.c
head.h
#ifndef __HEAD_H__
#define __HEAD_H__typedef struct
{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
} gpio_t;
#define PHY_LED1_ADDR 0X50006000
#define PHY_LED2_ADDR 0X50007000
#define PHY_LED3_ADDR 0X50006000
#define PHY_RCC_ADDR 0X50000A28// 功能码
#define LED_ON _IOW('1', 1, int)
#define LED_OFF _IOW('1', 0, int)#endif // MACRO
mycdev.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/slab.h>
#include <linux/cdev.h>
#include "head.h"struct cdev *cdev;
struct class *cls;
struct device *dev;char kbuf[128] = {0};
unsigned int major = 500;
unsigned int minor = 0; // 次设备号的起始值
dev_t devnum;gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;
// 定义一个自旋锁
spinlock_t lock;int mycdev_open(struct inode *inode, struct file *file)
{int a = inode->i_rdev;file->private_data = (void *)MINOR(a);printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{unsigned int which;which = (unsigned int)file->private_data;// copy_from_user(&which,(void *)arg,4);// 上锁spin_lock(&lock);switch (cmd){case LED_ON:switch (which){case 0: // LED1vir_led1->ODR |= (0x1 << 10); // LED1开灯break;case 1: // LED2vir_led2->ODR |= (0x1 << 10); // LED2开灯break;case 2: // LED3vir_led3->ODR |= (0x1 << 8); // LED3开灯break;}break;case LED_OFF:switch (which){case 0:vir_led1->ODR &= (~(0X1 << 10));break;case 1:vir_led2->ODR &= (~(0X1 << 10));break;case 2:vir_led3->ODR &= (~(0X1 << 8));break;}break;}// 解锁spin_unlock(&lock);return 0;
}int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}// 定义操作方法结构体变量并赋值
struct file_operations fops = {.open = mycdev_open,.release = mycdev_close,.unlocked_ioctl = mycdev_ioctl,
};int all_led_init(void)
{// 寄存器地址的映射vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));if (vir_led1 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));if (vir_led2 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_rcc = ioremap(PHY_RCC_ADDR, 4);if (vir_rcc == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}printk("物理地址映射成功\n");// 寄存器的初始化// rcc(*vir_rcc) |= (3 << 4);// led1vir_led1->MODER &= (~(3 << 20));vir_led1->MODER |= (1 << 20);vir_led1->ODR &= (~(1 << 10));// led2vir_led2->MODER &= (~(3 << 20));vir_led2->MODER |= (1 << 20);vir_led2->ODR &= (~(1 << 10));// led3vir_led3->MODER &= (~(3 << 16));vir_led1->MODER |= (1 << 16);vir_led1->ODR &= (~(1 << 8));printk("寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{int ret, i;// 初始化上锁spin_lock_init(&lock);// 1.申请对象空间cdev = cdev_alloc();if (NULL == cdev){printk("wangsong申请对象空间失败\n");ret = -EFAULT;goto OUT1;}printk("wangsong申请对象空间成功\n");// 2.初始化对象cdev_init(cdev, &fops);printk("wangsong初始化对象成功\n");// 3.申请设备号if (0 == major){ret = alloc_chrdev_region(&devnum, minor, 3, "wangsong");if (ret){printk("wangsong动态申请设备号失败\n");goto OUT2;}major = MAJOR(devnum);minor = MINOR(devnum);}else{ret = register_chrdev_region(MKDEV(major, minor), 3, "wangsong");if (ret){printk("wangsong静态申请设备号失败\n");goto OUT2;}}printk("wangsong申请设备号成功\n");// 4.注册驱动对象ret = cdev_add(cdev, MKDEV(major, minor), 3);if (ret){printk("wangsong注册驱动对象失败\n");goto OUT3;}printk("wangsong注册驱动对象成功\n");// 5.向上提交目录cls = class_create(THIS_MODULE, "wangsong");if (IS_ERR(cls)){printk("wangsong向上提交目录失败\n");goto OUT4;}printk("wangsong向上提交目录成功\n");// 6.向上提交设备信息for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "wangsong%d", i);if (IS_ERR(dev)){printk("wangsong向上提交设备节点失败\n");ret = -PTR_ERR(dev);goto OUT5;}}printk("wangsong向上提交设备节点成功\n");// 寄存器映射以及初始化all_led_init();return 0;
OUT5:for (--i; i >= 0; i--){device_destroy(cls, MKDEV(major, i));}class_destroy(cls);OUT4:cdev_del(cdev);OUT3:unregister_chrdev_region(MKDEV(major, minor), 3);OUT2:kfree(cdev);OUT1:return ret;
}
static void __exit mycdev_exit(void)
{int i;// 取消地址映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_rcc);// 1.销毁设备信息for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));printk("wangsong销毁设备信息成功\n");}// 2.销毁目录class_destroy(cls);printk("wangsong销毁目录成功\n");// 3.注销驱动对象cdev_del(cdev);printk("wangsong注销驱动对象成功\n");// 4.释放设备号unregister_chrdev_region(MKDEV(major, minor), 3);printk("wangsong释放设备号成功\n");// 5.释放对象空间kfree(cdev);printk("wangsong释放对象空间成功\n");
}module_init(mycdev_init);module_exit(mycdev_exit);MODULE_LICENSE("GPL");
fun.c
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <sys/ioctl.h>
#include <string.h>
#include "head.h"int main(int argc, char const *argv[])
{/* code */int a, b;char buf[128] = {0};printf("调用open\n");int fd0 = open("/dev/wangsong0", O_RDWR);if (fd0 < 0){printf("打开设备文件失败\n");exit(-1);}int fd1 = open("/dev/wangsong1", O_RDWR);if (fd1 < 0){printf("打开设备文件失败\n");exit(-1);}int fd2 = open("/dev/wangsong2", O_RDWR);if (fd2 < 0){printf("打开设备文件失败\n");exit(-1);}while (1){// 从终端读取printf("请输入要点亮的灯号(1-3)+操作(0[灭]、1[亮])[exit退出程序]:");fgets(buf, sizeof(buf), stdin);buf[strlen(buf) - 1] = '\0';if (!strcmp(buf, "exit"))break;a = (int)buf[1] - 48;b = (int)buf[0] - 48;printf("a=%d,b=%d", a, b);if (a == 1){switch (b){case 1:if (ioctl(fd0, LED_ON, &b)){printf("开灯失败\n");}break;case 2:if (ioctl(fd1, LED_ON, &b)){printf("开灯失败\n");}break;case 3:if (ioctl(fd2, LED_ON, &b)){printf("开灯失败\n");}break;default:printf("格式错误请重新输入>>>\n");}}else{switch (b){case 1:if (ioctl(fd0, LED_OFF, &b)){printf("关灯失败\n");}break;case 2:if (ioctl(fd1, LED_OFF, &b)){printf("关灯失败\n");}break;case 3:if (ioctl(fd2, LED_OFF, &b)){printf("关灯失败\n");}break;default:printf("格式错误请重新输入>>>\n");}}}printf("调用close\n");close(fd0);close(fd1);close(fd2);return 0;
}
Makefile
modname ?= mycdevarch ?= armifeq ($(arch),arm)
KERNELDIR:= /home/ubuntu/13_UBOOT/linux-stm32mp-5.10.61-stm32mp-r2-r0/linux-5.10.61
else
KERNELDIR:=/lib/modules/$(shell uname -r)/build/
endifPWD:=$(shell pwd)all:make -C $(KERNELDIR) M=$(PWD) modulesclean:make -C $(KERNELDIR) M=$(PWD) cleanobj-m:=$(modname).o相关文章:
)
驱动开发 day4 (led灯组分块驱动)
//编译驱动(注意Makefile的编译到移植到开发板的内核) make archarm //清除编译生成文件 make clean //安装驱动 insmod mycdev.ko //卸载驱动 rmmod mycdev //编译fun.c 函数(用到交叉工具编译) arm-linux-gnueabihf-gcc fun.c head.h #ifndef __HEAD_H__ #define __HEAD_H__…...
electron dialog.showMessageBox使用案例
electron 版本:25.3.1 index.html <!DOCTYPE html> <html> <head><meta charset"UTF-8"><title>Hello World!</title><meta http-equiv"Content-Security-Policy" content"script-src self unsa…...

代码随想录算法训练营第二十二天 | 读PDF复习环节2
读PDF复习环节2 本博客的内容只是做一个大概的记录,整个PDF看下来,内容上是不如代码随想录网站上的文章全面的,并且PDF中有些地方的描述,是很让我疑惑的,在困扰我很久后,无意间发现,其网站上的讲…...

TimescaleDB时序数据库初识
注:本文翻译自https://legacy-docs.timescale.com/v1.7/introduction TimescaleDB是一个开源时间序列数据库,针对快速摄取和复杂查询进行了优化。它说的是“完整的SQL”,因此像传统的关系数据库一样易于使用,并且以以前为NoSQL数…...

Numpy-聚合函数
NumPy 提供了很多统计函数,用于从数组中查找最小元素,最大元素,百分位标准差和方差等。 函数名说明np.sum()求和np.prod()所有元素相乘np.mean()平均值np.std()标准差np.var()方差np.median()中位数np.power()幂运算np.sqrt()开方np.min()最小…...

企业博客资讯如何高效运营起来?
运营一个高效的企业博客资讯需要综合考虑多个因素,包括内容策划、发布频率、优化推广、互动反馈等。下面将从这些方面介绍如何高效运营企业博客资讯。 如何高效运营企业博客资讯 内容策划 首先,需要制定一个明确的内容策略。确定博客的定位和目标受众…...

跟我学c++中级篇——模板的继承
一、继承 面向对象编程有三个特点:封装、继承和多态。其中继承在其中起着承上启下的作用。一般来说,继承现在和组合的应用比较难区分,出于各种场景和目的,往往各有千秋。但目前主流的观点,一般是如果没有特殊情况&…...
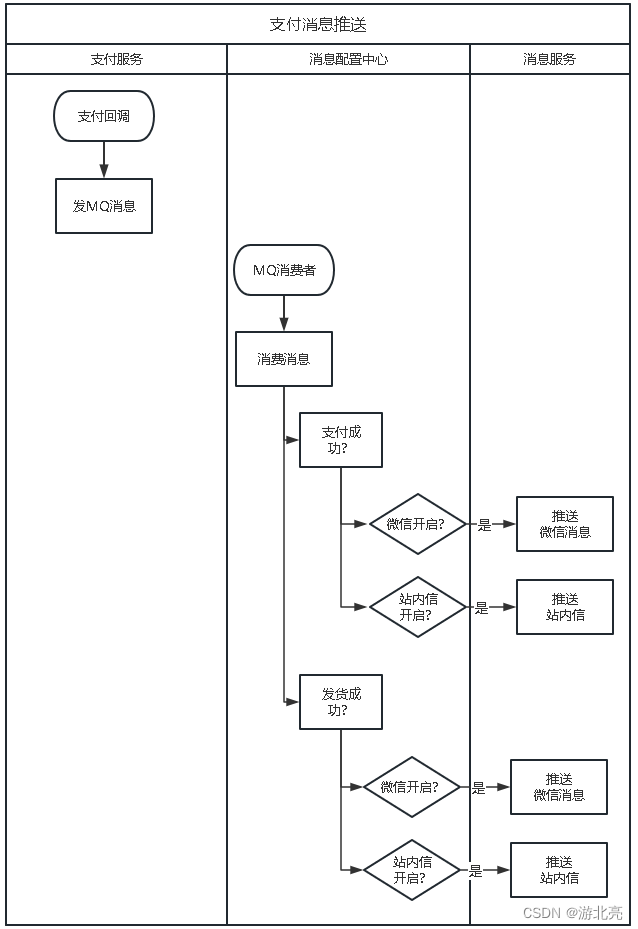
需求分析案例:消息配置中心
本文介绍了一个很常见的消息推送需求,在系统需要短信、微信、邮件之类的消息推送时,边界如何划分和如何设计技术方案。 1、需求 一个系统,一般会区分多个业务模块,并拆分成不同的业务系统,例如一个商城的架构如下&am…...

自动化测试——环境
一、搭建环境 1、安装Slenium pip install selenium 2、安装浏览器驱动-》查询浏览器版本-》下载对应版本驱动-》在path路径中配置(浏览器更新需要重新下载) pip install webdriver -helper(自动化)python3.9以上 pip install 安…...

短视频矩阵营销系统技术开发者开发笔记分享
一、开发短视频seo抖音矩阵系统需要遵循以下步骤: 1. 确定系统需求:根据客户的需求,确定系统的功能和特点,例如用户注册登录、视频上传、视频浏览、评论点赞等。 2. 设计系统架构:根据系统需求,设计系统的…...

vue2和vue3引用ueditor的区别
官方文档入口 UEditor Docs vue2使用方式 UE.vue组件 <template><div><script id"editor" type"text/plain"></script><Upload v-if"isupload" :config"{total:9}" :isupload"isupload" ret…...
【每日运维】RockyLinux8非容器化安装Mysql、Redis、RabitMQ单机环境
系统版本:RockyLinux 8.6 安装方式:非容器化单机部署 安装版本:mysql 8.0.32 redis 6.2.11 rabbitmq 3.11.11 elasticsearch 6.7.1 前置条件:时间同步、关闭selinux、主机名、主机解析host 环境说明:PC电脑VMware Work…...
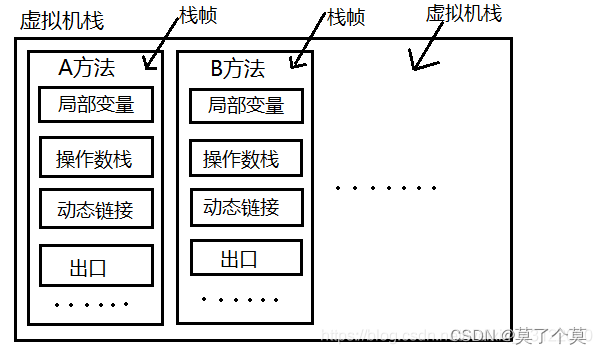
第一次后端复习整理(JVM、Redis、反射)
1. JVM 文章仅为自身笔记 详情查看一篇文章掌握整个JVM,JVM超详细解析!!! 1.1 什么是JVM jvm是Java虚拟机 1.2 Java文件的编译过程 程序员编写代码形成.java文件经过javac编译成.class文件再通过JVM的类加载器进入运行时数据…...
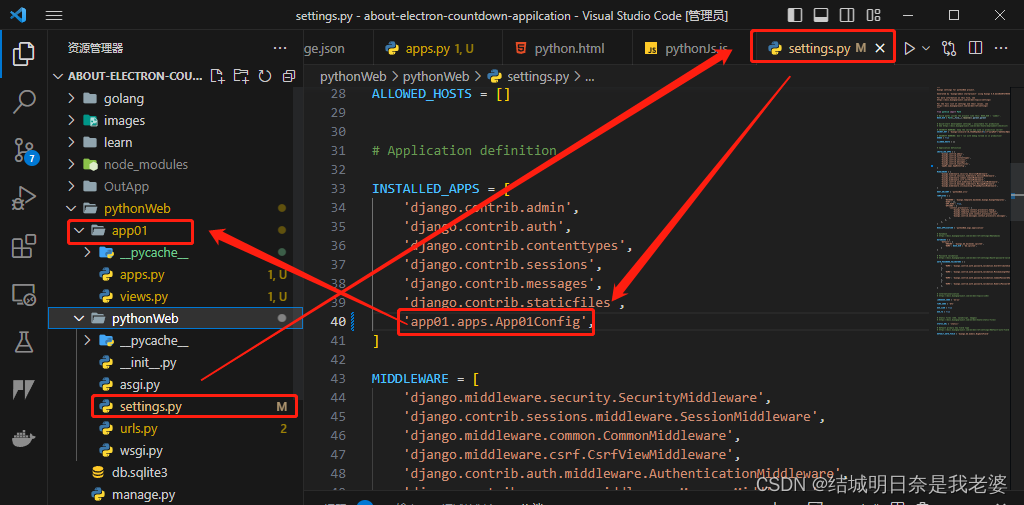
python的web学习(一)-初识django
文章目录 软件创建项目默认项目文件说明App的概念(应用)apps.py编写URL和视图函数对应关系【urls.py】编写视图函数【views.py】启动服务 软件 python下载 django下载 创建项目 django-admin startproject 文件名默认项目文件说明 项目名 manage.py(项目管理,启…...

JavaWeb+jsp+Tomcat的叮当书城项目
点击以下链接获取源码: https://download.csdn.net/download/qq_64505944/88123111?spm1001.2014.3001.5503 技术:ssm jsp JDK1.8 MySQL5.7 Tomcat8.3 源码数据库课程设计 功能:管理员与普通用户和超级管理员三个角色,管理员可…...

【嵌入式Linux系统开发】——系统移植概述
目录 🍉🍉一、什么是嵌入式系统 🍉🍉二、嵌入式系统操作 🍉🍉三、嵌入式Linux的特点 🍉🍉四、嵌入式系统的组成 1、硬件和软件 2、硬件层 3、中间层 4、软件层 5、 功能层与执…...

升讯威在线客服系统是如何实现对 IE8 完全完美支持的(怎样从 WebSocket 降级到 Http)【干货】
简介 升讯威在线客服与营销系统是基于 .net core / WPF 开发的一款在线客服软件,宗旨是: 开放、开源、共享。努力打造 .net 社区的一款优秀开源产品。 完整私有化包下载地址 💾 https://kf.shengxunwei.com/freesite.zip 当前版本信息 发布…...
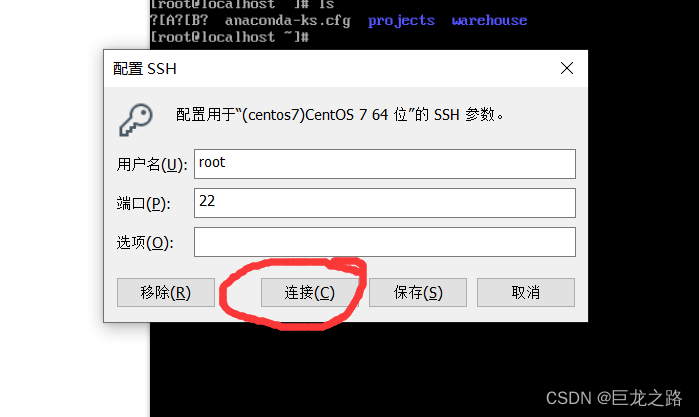
用VMware给运行在VMware上的CentOS7生成一个以SSH方式连接VMware上的CentOS7的运行在Windows上的命令行窗口
2023年7月27日,周四早上 目录 一个发现生成方法如果上面的方法连接失败,就采取这个方法 一个发现 今天早上无意间发现VMware可以生成一个以SSH方式连接着CentOS7的Windows命令行窗口, 这样做可以带来一定的便利性 : 方便复制、…...

C语言基础-3
1、函数 函数是C语言代码的基本组成部分,它是一个小的模块,整个程序由很多个功能独立的模块(函数)组成。这就是程序设计的基本分化方法。 main:C语言中所谓的主函数,主函数就是一种特别的函数。特别之处在于…...
 | 命名规范)
Python 编程规范进阶(1) | 命名规范
养成良好的开发、编程习惯 跟着google开源项目走 https://github.com/google/styleguide 近期Target: 命名规范; Pythonic 积累 按照需求写需要的API; 写前先动脑子,比如画流程图,测试接口; Google 推荐的P…...

LLM API安全攻防实战:从提示词注入到自动化测试方案
1. 项目概述:被忽视的LLM API安全前线最近在帮几个团队做上线前的安全审计,发现一个挺有意思的现象:大家对于传统API的鉴权、限流、SQL注入这些常规检查已经形成了肌肉记忆,但一旦涉及到LLM(大语言模型)的A…...

BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行
BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...

【UniApp小程序开发】解决无法使用Vue自定义指令的完美替代方案:权限组件封装
在 UniApp 开发中,你是否遇到过这样的困惑:明明在 Vue Web 项目中用得顺手的 v-permission 自定义指令,一到小程序端就完全失效?本文将深入剖析其原因,并提供一套可直接复用的组件化解决方案,让你在小程序中…...

为内部知识库问答机器人接入Taotoken多模型增强回答效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部知识库问答机器人接入Taotoken多模型增强回答效果 构建一个高效的企业内部知识库问答机器人,核心挑战在于如何让…...

为什么鸿蒙 App 最终都会走向状态驱动?
子玥酱 (掘金 / 知乎 / CSDN / 简书 同名) 大家好,我是 子玥酱,一名长期深耕在一线的前端程序媛 👩💻。曾就职于多家知名互联网大厂,目前在某国企负责前端软件研发相关工作,主要聚…...

多智能体谈判系统:Agent 如何通过博弈达成最优交易价格?
多智能体谈判系统:Agent 如何通过博弈达成最优交易价格?关键词 多智能体系统、自动谈判、博弈论、纳什均衡、帕累托最优、双边/多边谈判、强化学习谈判、动态定价 摘要 想象一个没有人类中介的世界:电商平台上的智能客服自动和批发商砍价、供…...

高精度光照检测
光线检测仪,kotlin开发,调用手机感光模块检测室内外光照强度,用途多多,我主要用途孩子写作业检测光照保护视力。 食用方法∶打开即测,速度快,无广告,手机平视即可,无须直视光线。 买…...

氘可来昔替尼常见副作用为鼻咽炎头痛及腹泻,如何应对
任何口服药物的临床价值,都必须在疗效与安全性的天平上找到精准的平衡点。氘可来昔替尼以PASI 75应答率的全面胜出证明了自己在银屑病治疗中的卓越地位,而其不良反应谱同样经过了严苛的临床验证。鼻咽炎、头痛和腹泻构成了这款药物最需关注的三大安全信号…...

3步快速解密中兴光猫配置:ZET工具终极实战指南
3步快速解密中兴光猫配置:ZET工具终极实战指南 【免费下载链接】ZET-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/ze/ZET-Optical-Network-Terminal-Decoder 中兴光猫配置解密工具是每个网络管理员必备的神器!Z…...

3个实用场景教你轻松解锁网易云音乐NCM加密文件:ncmdumpGUI完整指南
3个实用场景教你轻松解锁网易云音乐NCM加密文件:ncmdumpGUI完整指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的…...