ROS应用之SwarmSim在ROS 中的协同路径规划
SwarmSim 在 ROS 中的协同路径规划

前言

在多机器人系统(Multi-Robot Systems, MRS)中,SwarmSim 是一个常用的模拟工具,可以对多机器人进行仿真以实现复杂任务的协同。除了任务分配逻辑以外,SwarmSim 在协同路径规划方面也具有重要意义。协同路径规划是指多机器人在同一环境中找到彼此不发生冲突的最优路径,以完成各自的目标任务。本文将从理论到实现详细解析 SwarmSim 在协同路径规划中的应用。
原理介绍
1. 基本概念
协同路径规划的核心在于 避免冲突 和 优化路径:
-
避免冲突:确保机器人不会因路径交叉而发生碰撞。
-
优化路径:基于最短路径、最小时间消耗或其他优化目标,找到机器人从起点到终点的最佳路线。
在 SwarmSim 中,协同路径规划常基于以下模型:
-
A* 算法:单机器人路径规划的基础。
-
CBS 算法(Conflict-Based Search):解决多机器人冲突的扩展。
-
时间-空间网络模型:将机器人路径规划扩展到时间维度。
2. 整体流程
SwarmSim 的协同路径规划包括以下步骤:
-
环境建模:
-
将机器人运行的空间划分为栅格地图。
-
地图中每个单元格表示一个可能的机器人位置。
-
-
单机器人路径规划:
-
每个机器人独立计算从起点到终点的最优路径(例如通过 A* 算法)。
-
-
冲突检测:
-
检测多个机器人路径是否存在冲突(例如同时占用同一单元格)。
-
-
冲突解决:
-
若存在冲突,通过 CBS 算法为冲突机器人重新规划路径。
-
-
路径优化:
-
综合考虑路径长度和时间约束,优化整体路径。
-
3. 关键特点
-
分布式与集中式协作:
-
SwarmSim 支持分布式路径规划(机器人独立决策)和集中式路径规划(统一决策)。
-
-
动态环境适应性:
-
在动态环境中,机器人能够根据新出现的障碍物或动态任务重新规划路径。
-
-
可扩展性:
-
SwarmSim 能够模拟多达数百个机器人的协同路径规划任务。
-
4. 算法流程
以下为 CBS 算法的基本步骤:
-
初始化:
-
每个机器人独立生成一条无冲突路径。
-
-
冲突检测:
-
遍历所有机器人路径,记录冲突信息(如时间、位置)。
-
-
冲突分解:
-
根据冲突信息创建约束,限制机器人使用冲突位置。
-
重新生成冲突机器人的路径。
-
-
路径优化:
-
综合路径总长度和其他优化目标,生成最终的路径规划结果。
-
公式描述如下:
-
路径总代价:

其中,N 为机器人总数,Cost(Pi) 表示第 i 个机器人的路径代价。
-
冲突检测函数:

部署环境介绍
-
操作系统:Ubuntu 20.04
-
ROS 版本:ROS 2 Humble
-
依赖工具:
-
SwarmSim
-
RViz(用于可视化)
-
Python 或 C++(用于算法实现)
-
部署流程
-
安装 SwarmSim:
git clone https://github.com/swarm-sim/swarm-sim.git cd swarm-sim colcon build source install/setup.bash -
准备地图文件:
-
使用 YAML 格式定义环境地图:
resolution: 0.05 origin: [0.0, 0.0, 0.0] occupancy_grid: map.pgm
-
-
启动仿真环境:
ros2 launch swarm_sim launch_simulation.launch.py
-
启动协同路径规划节点:
-
运行示例代码,完成机器人路径规划。
-
代码示例
以下为 CBS 算法的简化实现:
import heapq
class CBSPlanner:def __init__(self, robots, environment):self.robots = robotsself.environment = environmentself.open_list = []
def plan_paths(self):# Step 1: Initialize pathspaths = {robot: self.plan_individual_path(robot) for robot in self.robots}heapq.heappush(self.open_list, (self.calculate_cost(paths), paths, []))return self.resolve_conflicts()
def plan_individual_path(self, robot):# Basic A* implementation# Returns path for a single robotpass
def calculate_cost(self, paths):return sum(len(path) for path in paths.values())
def resolve_conflicts(self):while self.open_list:cost, paths, constraints = heapq.heappop(self.open_list)conflicts = self.detect_conflicts(paths)if not conflicts:return pathsfor conflict in conflicts:new_constraints = constraints + [self.create_constraint(conflict)]new_paths = self.replan_with_constraints(new_constraints)heapq.heappush(self.open_list, (self.calculate_cost(new_paths), new_paths, new_constraints))
def detect_conflicts(self, paths):# Detect conflicts in the pathspass
def create_constraint(self, conflict):# Create new constraints based on conflictpass
def replan_with_constraints(self, constraints):# Replan paths with updated constraintspass
代码解读
1. 初始化路径规划
-
函数
plan_individual_path
-
调用单机器人路径规划算法(如 A*)计算初始路径。
-
输出为机器人从起点到终点的路径。
-
2. 冲突检测
-
函数
detect_conflicts
-
遍历所有路径,检测是否存在同时访问同一单元格的情况。
-
3. 冲突分解
-
函数
create_constraint
-
根据冲突生成约束,例如禁止机器人在特定时间访问某单元格。
-
4. 路径优化
-
函数
calculate_cost
-
计算当前路径的总代价,用于比较不同路径规划结果的优劣。
-
运行效果说明
1. 实验环境设置
-
地图设置:10x10 栅格地图,障碍物随机分布,部分区域设置为高代价区域。
-
机器人数量:3 台机器人,分别从不同的起点(如 (1,1),(3,5),(8,8))出发,到达各自目标点(如 (9,9),(1,8),(5,3))。
-
初始路径规划:每台机器人独立运行 A* 算法生成路径,不考虑冲突。
-
规划目标:消除冲突,最小化路径总长度,同时保持实时性。
2. 实验步骤记录
-
运行初始路径规划节点:
点击三木地带你手搓ROS应用之SwarmSim在ROS 中的协同路径规划查看全文。
相关文章:
ROS应用之SwarmSim在ROS 中的协同路径规划
SwarmSim 在 ROS 中的协同路径规划 前言 在多机器人系统(Multi-Robot Systems, MRS)中,SwarmSim 是一个常用的模拟工具,可以对多机器人进行仿真以实现复杂任务的协同。除了任务分配逻辑以外,SwarmSim 在协同路径规划方…...
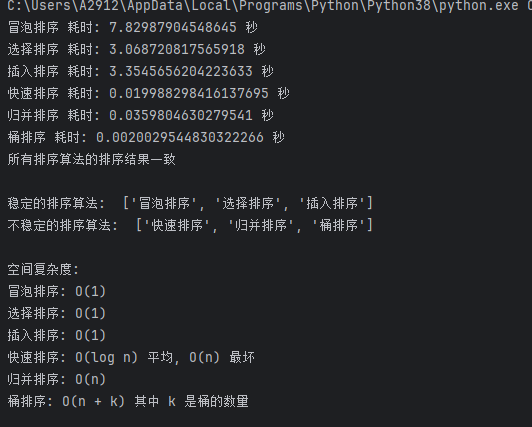
蓝桥杯python基础算法(2-1)——排序
目录 一、排序 二、例题 P3225——宝藏排序Ⅰ 三、各种排序比较 四、例题 P3226——宝藏排序Ⅱ 一、排序 (一)冒泡排序 基本思想:比较相邻的元素,如果顺序错误就把它们交换过来。 (二)选择排序 基本思想…...

深度学习中常用的评价指标方法
深度学习中常用的评价指标方法因任务类型(如分类、回归、分割等)而异。以下是一些常见的评价指标: 1. 分类任务 准确率(Accuracy) 定义:正确预测的样本数占总样本数的比例。 公式:AccuracyTPT…...

linux 进程补充
环境变量 基本概念 环境变量(environment variables)一般是指在操作系统中用来指定操作系统运行环境的一些参数 如:我们在编写C/C代码的时候,在链接的时候,从来不知道我们的所链接的动态静态库在哪 里,但是照样可以链接成功&#…...

Django框架的全面指南:从入门到高级
Django框架的全面指南:从入门到高级 目录 引言Django简介安装与配置创建第一个Django项目Django的MVT架构模型(Model)视图(View)模板(Template)URL路由表单处理用户认证与权限Django Admin高级…...

C基础寒假练习(8)
一、终端输入10个学生成绩,使用冒泡排序对学生成绩从低到高排序 #include <stdio.h> int main(int argc, const char *argv[]) {int arr[10]; // 定义一个长度为10的整型数组,用于存储学生成绩int len sizeof(arr) / sizeof(arr[0]); // 计算数组…...

Python爬虫:1药城店铺爬虫(完整代码)
⭐️⭐️⭐️⭐️⭐️欢迎来到我的博客⭐️⭐️⭐️⭐️⭐️ 🐴作者:秋无之地 🐴简介:CSDN爬虫、后端、大数据领域创作者。目前从事python爬虫、后端和大数据等相关工作,主要擅长领域有:爬虫、后端、大数据…...

【贪心算法篇】:“贪心”之旅--算法练习题中的智慧与策略(一)
✨感谢您阅读本篇文章,文章内容是个人学习笔记的整理,如果哪里有误的话还请您指正噢✨ ✨ 个人主页:余辉zmh–CSDN博客 ✨ 文章所属专栏:贪心算法篇–CSDN博客 文章目录 一.贪心算法1.什么是贪心算法2.贪心算法的特点 二.例题1.柠…...

Rust 变量特性:不可变、和常量的区别、 Shadowing
Rust 变量特性:不可变、和常量的区别、 Shadowing Rust 是一门以安全性和性能著称的系统编程语言,其变量系统设计独特且强大。本文将从三个角度介绍 Rust 变量的核心特性:可变性(Mutability)、变量与常量的区别&#…...

基于Springboot框架的学术期刊遴选服务-项目演示
项目介绍 本课程演示的是一款 基于Javaweb的水果超市管理系统,主要针对计算机相关专业的正在做毕设的学生与需要项目实战练习的 Java 学习者。 1.包含:项目源码、项目文档、数据库脚本、软件工具等所有资料 2.带你从零开始部署运行本套系统 3.该项目附…...

方法一:将私钥存入环境变量,环境变量指什么//spring中,rsa私钥应该怎么处置
环境变量(Environment Variables)是操作系统提供的一种机制,用于存储和传递配置信息或敏感数据(如密钥、密码等)。每个进程都可以访问一组环境变量,这些变量在操作系统级别定义,可以被应用程序读…...
钩子和函数式组件底层渲染流程详解)
React中useState()钩子和函数式组件底层渲染流程详解
useState()钩子底层渲染流程 React中useState的底层渲染机理。首先,我知道useState是React Hooks的一部分,用于在函数组件中添加状态。但底层是如何工作的呢?可能涉及到React的调度器、Fiber架构以及闭包等概念。 首先,React使用F…...

Cocos Creator 3.8 2D 游戏开发知识点整理
目录 Cocos Creator 3.8 2D 游戏开发知识点整理 1. Cocos Creator 3.8 概述 2. 2D 游戏核心组件 (1) 节点(Node)与组件(Component) (2) 渲染组件 (3) UI 组件 3. 动画系统 (1) 传统帧动画 (2) 动画编辑器 (3) Spine 和 …...

Java创建对象有几种方式?
大家好,我是锋哥。今天分享关于【Java创建对象有几种方式?】面试题。希望对大家有帮助; Java创建对象有几种方式? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 在 Java 中,创建对象有几种常见的方式,具体如下&…...

R 字符串:深入理解与高效应用
R 字符串:深入理解与高效应用 引言 在R语言中,字符串是数据处理和编程中不可或缺的一部分。无论是数据清洗、数据转换还是数据分析,字符串的处理都是基础技能。本文将深入探讨R语言中的字符串概念,包括其基本操作、常见函数以及高效应用方法。 字符串基本概念 字符串定…...

基于Flask的全国星巴克门店可视化分析系统的设计与实现
【FLask】基于Flask的全国星巴克门店可视化分析系统的设计与实现(完整系统源码开发笔记详细部署教程)✅ 目录 一、项目简介二、项目界面展示三、项目视频展示 一、项目简介 该系统采用Python作为主要开发语言,结合Flask框架进行后端开发&…...

pytorch实现半监督学习
人工智能例子汇总:AI常见的算法和例子-CSDN博客 半监督学习(Semi-Supervised Learning,SSL)结合了有监督学习和无监督学习的特点,通常用于部分数据有标签、部分数据无标签的场景。其主要步骤如下: 1. 数…...

Golang :用Redis构建高效灵活的应用程序
在当前的应用程序开发中,高效的数据存储和检索的必要性已经变得至关重要。Redis是一个快速的、开源的、内存中的数据结构存储,为各种应用场景提供了可靠的解决方案。在这个完整的指南中,我们将学习什么是Redis,通过Docker Compose…...

deepseek+vscode自动化测试脚本生成
近几日Deepseek大火,我这里也尝试了一下,确实很强。而目前vscode的AI toolkit插件也已经集成了deepseek R1,这里就介绍下在vscode中利用deepseek帮助我们完成自动化测试脚本的实践分享 安装AI ToolKit并启用Deepseek 微软官方提供了一个针对AI辅助的插件,也就是 AI Toolk…...

49【服务器介绍】
服务器和你的电脑可以说是一模一样的,只不过用途不一样,叫法就不一样了 物理服务器和云服务器的区别 整台设备眼睛能够看得到的,我们一般称之为物理服务器。所以物理服务器是比较贵的,不是每一个开发者都能够消费得起的。 …...

【大数据技术】Day07:本机DataGrip远程连接虚拟机MySQL/Hive
本机DataGrip远程连接虚拟机MySQL/Hive datagrip-2024.3.4VMware Workstation Pro 16CentOS-Stream-10-latest-x86_64-dvd1.iso写在前面 本文主要介绍如何使用本机的DataGrip连接虚拟机的MySQL数据库和Hive数据库,提高编程效率。 安装DataGrip 请按照以下步骤安装DataGrip软…...

大语言模型的个性化综述 ——《Personalization of Large Language Models: A Survey》
摘要: 本文深入解读了论文“Personalization of Large Language Models: A Survey”,对大语言模型(LLMs)的个性化领域进行了全面剖析。通过详细阐述个性化的基础概念、分类体系、技术方法、评估指标以及应用实践,揭示了…...

[论文学习]Adaptively Perturbed Mirror Descent for Learning in Games
[论文学习]Adaptively Perturbed Mirror Descent for Learning in Games 前言概述前置知识和问题约定单调博弈(monotone game)Nash均衡和Gap函数文章问题定义Mirror Descent 方法评价 前言 文章链接 我们称集合是紧的,则集合满足࿱…...

大语言模型概述
一、主流大语言模型(LLMs) GPT系列(OpenAI) 基于Transformer解码器架构,以生成能力著称,代表产品包括ChatGPT(GPT-3.5/4),支持多轮对话、文本生成和复杂推理。其优势在于…...

【Unity踩坑】Unity项目管理员权限问题(Unity is running as administrator )
问题描述: 使用Unity Hub打开或新建项目时会有下面的提示。 解决方法: 打开“本地安全策略”: 在Windows搜索栏中输入secpol.msc并回车,或者从“运行”对话框(Win R,然后输入secpol.msc)启…...

深入理解Node.js_架构与最佳实践
1. 引言 1.1 什么是Node.js Node.js简介:Node.js是一个基于Chrome V8引擎的JavaScript运行时,用于构建快速、可扩展的网络应用。Node.js的历史背景和发展:Node.js最初由Ryan Dahl在2009年发布,旨在解决I/O密集型应用的性能问题。随着时间的推移,Node.js社区不断壮大,提供…...

一文讲解Java中的ArrayList和LinkedList
ArrayList和LinkedList有什么区别? ArrayList 是基于数组实现的,LinkedList 是基于链表实现的。 二者用途有什么不同? 多数情况下,ArrayList更利于查找,LinkedList更利于增删 由于 ArrayList 是基于数组实现的&#…...

使用 DeepSeek-R1 与 AnythingLLM 搭建本地知识库
一、下载地址Download Ollama on macOS 官方网站:Ollama 官方模型库:library 二、模型库搜索 deepseek r1 deepseek-r1:1.5b 私有化部署deepseek,模型库搜索 deepseek r1 运行cmd复制命令:ollama run deepseek-r1:1.5b 私有化…...
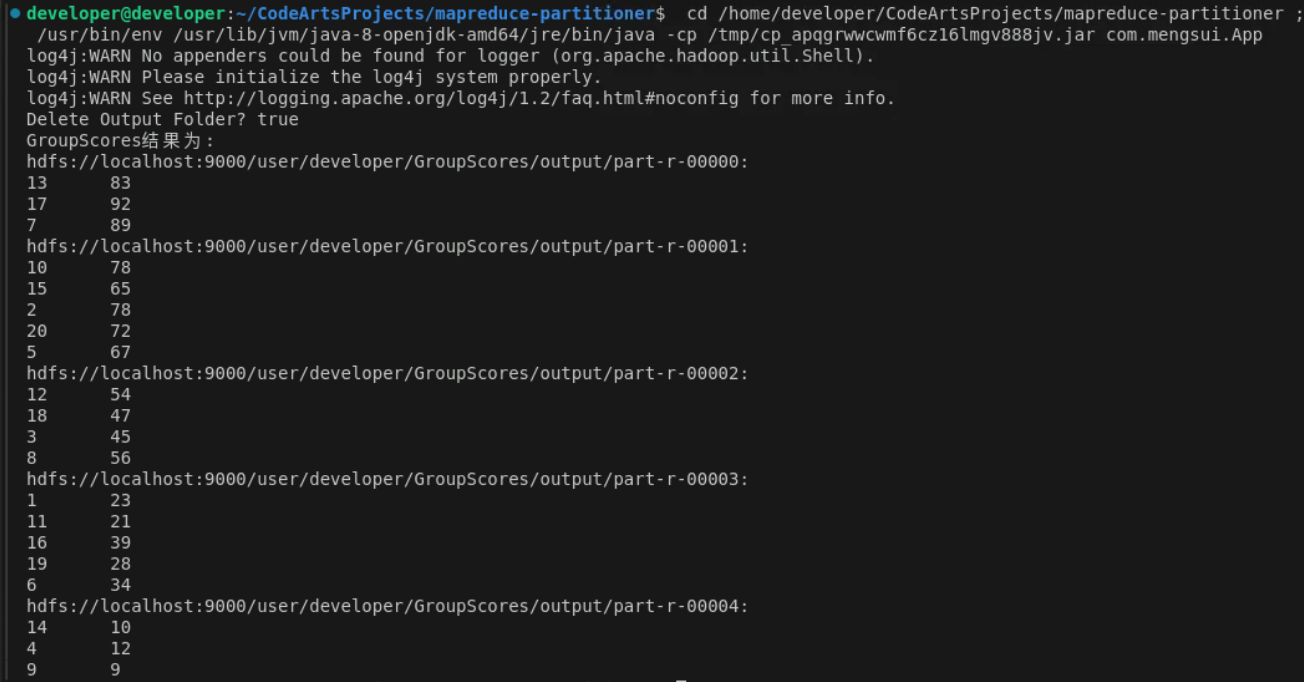
MapReduce分区
目录 1. MapReduce分区1.1 哈希分区1.2 自定义分区 2. 成绩分组2.1 Map2.2 Partition2.3 Reduce 3. 代码和结果3.1 pom.xml中依赖配置3.2 工具类util3.3 GroupScores3.4 结果 参考 本文引用的Apache Hadoop源代码基于Apache许可证 2.0,详情请参阅 Apache许可证2.0。…...

【Spring】Spring Cloud Alibaba 版本选择及项目搭建笔记
文章目录 前言1. 版本选择2. 集成 Nacos3. 服务间调用4. 集成 Sentinel5. 测试后记 前言 最近重新接触了 Spring Cloud 项目,为此参考多篇官方文档重新搭建一次项目,主要实践: 版本选择,包括 Spring Cloud Alibaba、Spring Clou…...