【机器人】复现 GraspNet 端到端抓取点估计 | PyTorch2.3 | CUDA12.1
GraspNet是通用物体抓取的大规模基准的基线模型,值得学习和复现。
本文分享使用较新版本的PyTorch和CUDA,来搭建开发环境。
论文地址:GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping
开源地址:https://github.com/graspnet/graspnet-baseline
1、安装torch2.3.1和cudatoolkit
首先创建一个Conda环境,名字为graspnet,python版本为3.10
然后进行graspnet环境
conda create -n graspnet python=3.10
conda activate graspnet这里需要安装pytorch2.3.1,cudatoolkit=12.1
conda install pytorch==2.3.1 torchvision==0.18.1 torchaudio==2.3.1 pytorch-cuda=12.1 -c pytorch -c nvidiapytorch2.3.1官网地址:https://pytorch.org/get-started/previous-versions/

2、安装CUDA12.1
首先需要安装好Nvidia 显卡驱动,后面还要安装CUDA12.1
输入命令:nvidia-smi,能看到显卡信息,说明Nvidia 显卡驱动安装好了

然后需要单独安装CUDA12.1了,上面虽然安装了CUDA12.2也不影响的
各种CUDA版本:CUDA Toolkit Archive | NVIDIA Developer
CUDA12.1下载地址:CUDA Toolkit 12.1 Update 1 Downloads | NVIDIA Developer
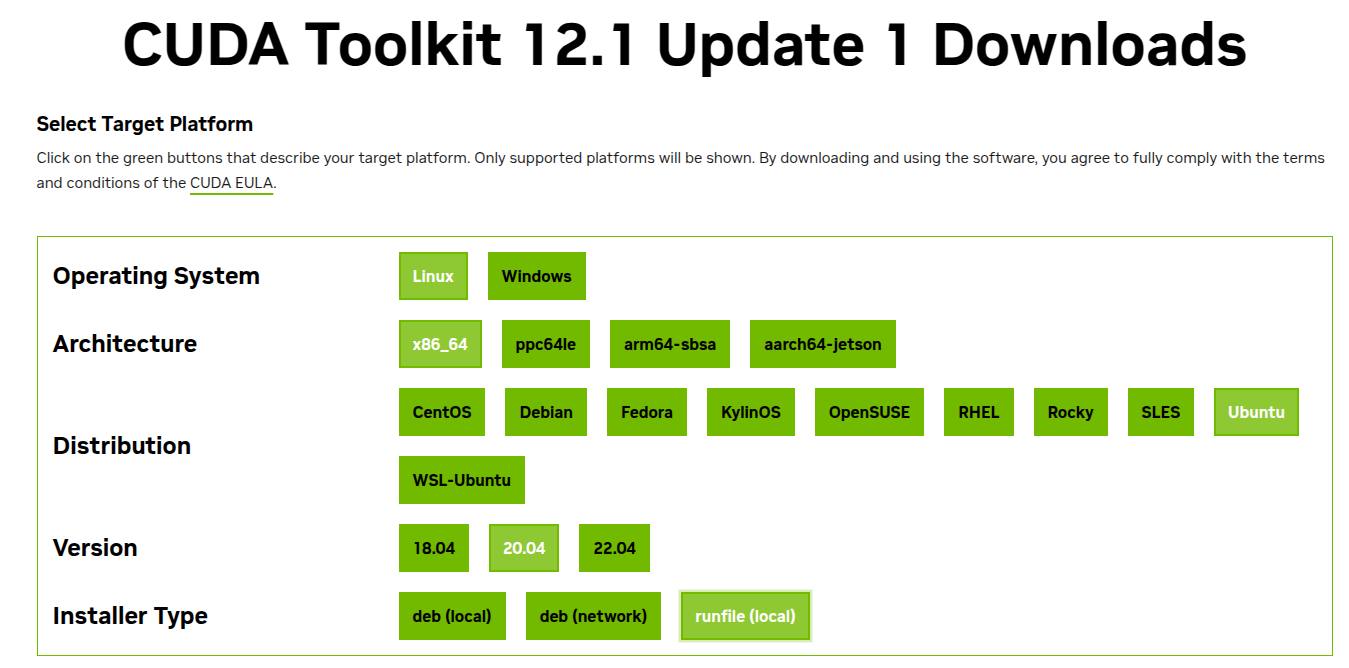
然后下载cuda_12.1.1_530.30.02_linux.run文件
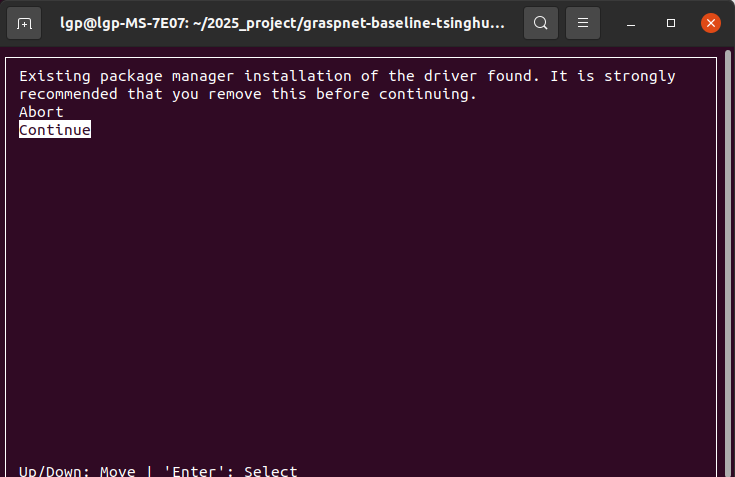
wget https://developer.download.nvidia.com/compute/cuda/12.1.1/local_installers/cuda_12.1.1_530.30.02_linux.run开始安装
sudo sh cuda_12.1.1_530.30.02_linux.run来到下面的界面,点击“Continue”
输入“accept”
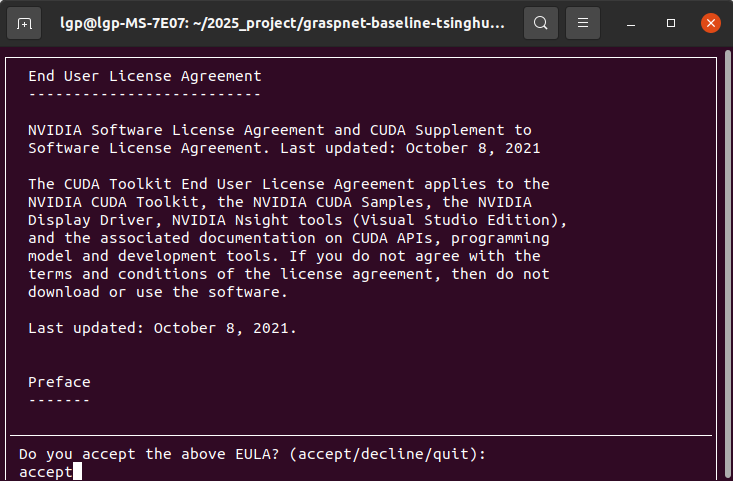
下面是关键,在530.30.02这里“回车”,取消安装;
这里X是表示需要安装的,我们只需安装CUDA12.1相关的即可
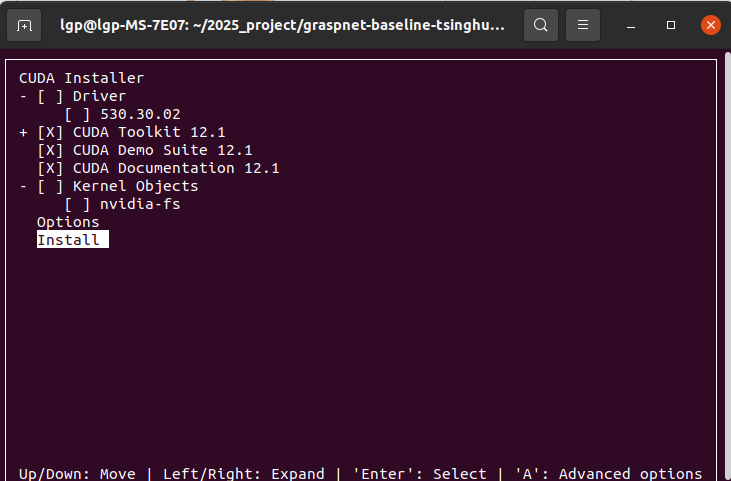
安装完成后,能看到/usr/local/cuda-12.1目录啦
(base) lgp@lgp-MS-7E07:~/2025_project$ ls /usr/local/
bin cuda-11.1 cuda-12.1 games lib sbin src
cuda cuda-11.3 etc include man share
设置CUDA环境变量
export CUDA_HOME=/usr/local/cuda-12.13、安装GraspNet相关依赖库
下载graspnet代码
git clone https://github.com/graspnet/graspnet-baseline.git
cd graspnet-baseline-main编辑 requirements.txt为:
numpy==1.23.0
scipy
open3d>=0.8
Pillow
tqdm
开始安装Graspness相关依赖库
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple4、编译安装pointnet2和knn
这些两个的安装需要CUDA编译的,依赖于前面的export CUDA_HOME=/usr/local/cuda-12.1
首先来到graspnet-baseline-main工程中,安装pointnet2
cd pointnet2
python setup.py install再安装knn
cd knn
python setup.py install5、安装graspnetAPI
下载graspnetAPI 代码,进行解压,进入文件目录
git clone https://github.com/graspnet/graspnetAPI.git
cd graspnetAPI需要修改 setup.py文件,将其中的sklearn替换为scikit-learn,并且numpy==1.23.0
然后进行安装:
pip install . -i https://pypi.tuna.tsinghua.edu.cn/simple到这里安装完成啦~
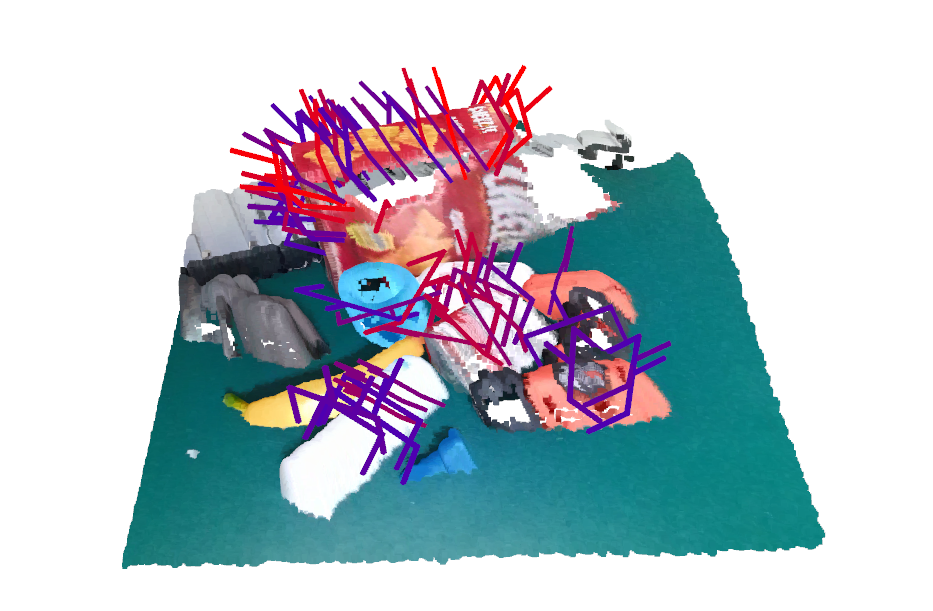
6、模型推理——抓取点估计
跑一下模型推理的demo,看看可视化的效果:
输出Top1的抓取位姿,需要修改代码 gg = gg[:1]
def vis_grasps(gg, cloud):gg.nms()gg.sort_by_score()gg = gg[:1]print(gg)grippers = gg.to_open3d_geometry_list()o3d.visualization.draw_geometries([cloud, *grippers])
分享完成~
相关文章:
【机器人】复现 GraspNet 端到端抓取点估计 | PyTorch2.3 | CUDA12.1
GraspNet是通用物体抓取的大规模基准的基线模型,值得学习和复现。 本文分享使用较新版本的PyTorch和CUDA,来搭建开发环境。 论文地址:GraspNet-1Billion: A Large-Scale Benchmark for General Object Grasping 开源地址:https:…...

视频联网平台智慧运维系统:智能时代的城市视觉中枢
引言:破解视频运维的"帕累托困境" 在智慧城市与数字化转型浪潮中,全球视频监控设备保有量已突破10亿台,日均产生的视频数据量超过10万PB。然而,传统运维模式正面临三重困境: 海量设备管理失序:…...

《网络管理》实践环节03:snmp服务器上对网络设备和服务器进行初步监控
兰生幽谷,不为莫服而不芳; 君子行义,不为莫知而止休。 应用拓扑图 3.0准备工作 所有Linux服务器上(服务器和Agent端)安装下列工具 yum -y install net-snmp net-snmp-utils 保证所有的HCL网络设备和服务器相互间能…...
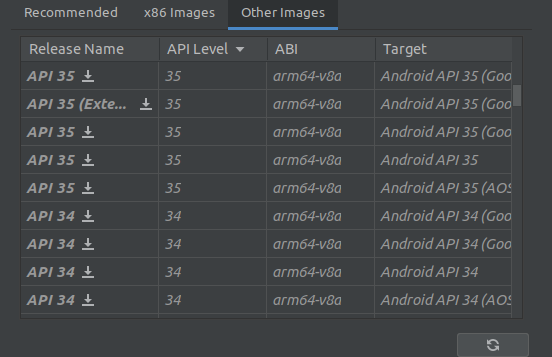
ubuntu中使用安卓模拟器
本文这里介绍 使用 android studio Emulator , 当然也有 Anbox (Lightweight), Waydroid (Best for Full Android Experience), 首先确保自己安装了 android studio ; sudo apt update sudo apt install openjdk-11-jdk sudo snap install…...
构造函数创建列表时元素 T的默认值)
【Qt】QList<T> list(n)构造函数创建列表时元素 T的默认值
Qt 6支持。 在 Qt 中,当使用 QList<T> list(n); 构造函数创建列表时,元素 T 的默认值取决于其类型的默认构造函数或值初始化规则。以下是常见数据类型的默认值分析: 1. 基本数据类型(POD 类型,Plain Old Data&a…...
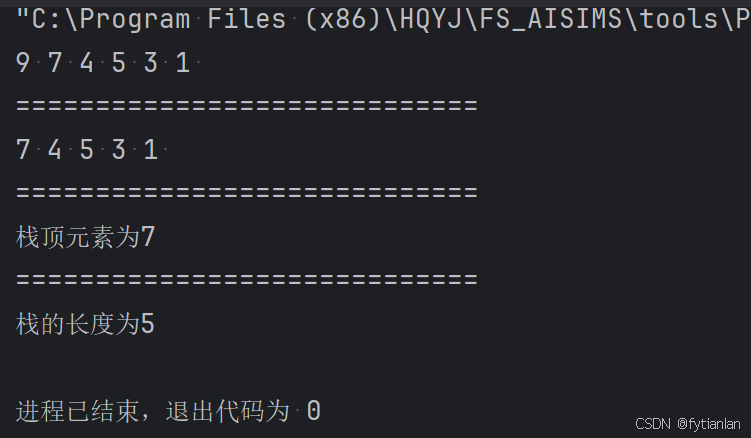
py数据结构day3
思维导图: 代码1(完成双向循环链表的判空、尾插、遍历、尾删): class Node:def __init__(self, data):self.data dataself.next Noneself.prev Noneclass DoubleCycleLink:def __init__(self):self.head Noneself.tail None…...

STM32单片机入门学习——第8节: [3-4] 按键控制LED光敏传感器控制蜂鸣器
写这个文章是用来学习的,记录一下我的学习过程。希望我能一直坚持下去,我只是一个小白,只是想好好学习,我知道这会很难,但我还是想去做! 本文写于:2025.04.02 STM32开发板学习——第8节: [3-4] 按键控制LED&光敏传感器控制蜂鸣器 前言开…...

【JavaScript】十三、事件监听与事件类型
文章目录 1、事件监听1.1 案例:击关闭顶部广告1.2 案例:随机点名1.3 事件监听的版本 2、事件类型2.1 鼠标事件2.1.1 语法2.1.2 案例:轮播图主动切换 2.2 焦点事件2.2.1 语法2.2.2 案例:模拟小米搜索框 2.3 键盘事件2.3.1 语法2.3.…...
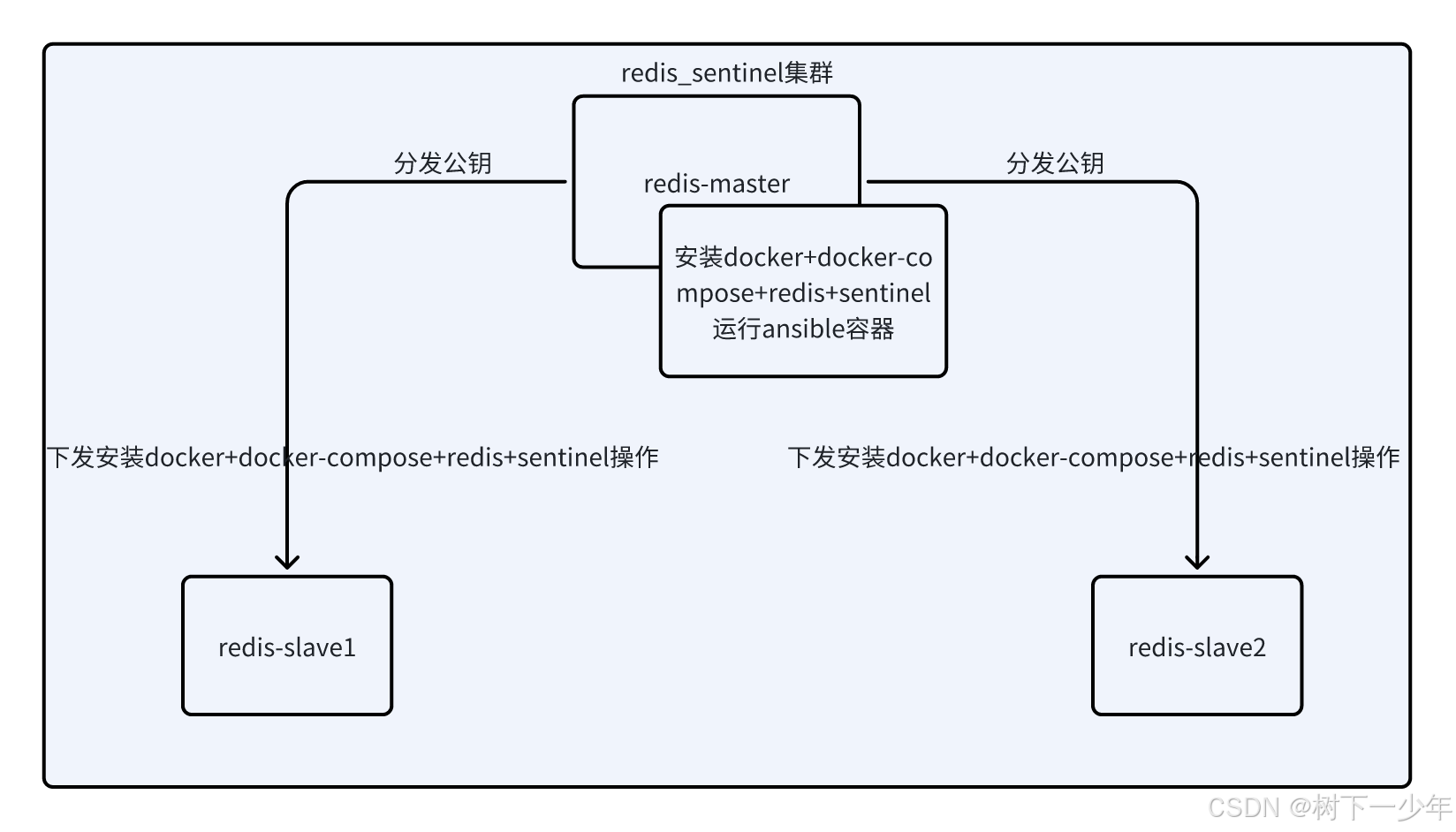
通过ansible+docker-compose快速安装一主两从redis+三sentinel
目录 示例主机列表 架构参考 文件内容 安装脚本 ansible变量,需修改 ansible配置文件和主机清单,需修改 运行方式 验证故障转移master 涉及redis镜像和完整的脚本文件 示例主机列表 架构参考 文件内容 安装脚本 #!/bin/bashset -e export pa…...

前端和AI怎么高度融合
前端工程师和人工智能(AI)结合可以创造出更加智能和交互式的用户体验。以下是一些前端工程师可以与AI结合的方式: AI聊天机器人:前端工程师可以开发基于AI的聊天机器人,用于与用户交互并提供实时帮助和支持。 个性化推…...

mysql docker容器启动遇到的问题整理
好几个月没折腾mysql的部署,弄了下,又遇到不少问题 问题一:Access denied for user ‘root‘‘172.18.0.1‘ docker容器启动后,本地navicat 连接报这个错误 查到两个方案,一个貌似是要让root用户能在任意ip地址&…...

HTTP keepalive 详解
一、简介 HTTP协议早期版本,比如1.0,默认是不使用持久连接的,也就是每个请求/响应之后都会关闭TCP连接。这样的话,每次请求都需要重新建立连接,增加了延迟和资源消耗。Keep-Alive的作用是保持连接,让多个请…...

长短期记忆神经网络(LSTM)基础学习与实例:预测序列的未来
目录 1. 前言 2. LSTM的基本原理 2.1 LSTM基本结构 2.2 LSTM的计算过程 3. LSTM实例:预测序列的未来 3.1 数据准备 3.2 模型构建 3.3 模型训练 3.4 模型预测 3.5 完整程序预测序列的未来 4. 总结 1. 前言 在深度学习领域,循环神经网络&…...

青少年编程与数学 02-015 大学数学知识点 01课题、概要
青少年编程与数学 02-015 大学数学知识点 01课题、概要 一、线性代数二、概率论与数理统计三、微积分四、优化理论五、离散数学六、数值分析七、信息论 《青少年编程与数学》课程要求,在高中毕业前,尽量完成大部分大学数学知识的学习。一般可以通过线上课…...

C++多继承
可以用多个基类来派生一个类。 格式为: class 类名:类名1,…, 类名n { private: … ; //私有成员说明; public: … ; //公有成员说明; protected: … ; //保护的成员说明; }; class D: public A, protected B, private C { …//派…...
【深度学习新浪潮】DeepSeek近期的技术进展及未来动向
一、近期技术进展 模型迭代与性能提升 DeepSeek-V3-0324版本更新:2025年3月24日发布,作为V3的小版本升级,参数规模达6850亿,采用混合专家(MoE)架构,激活参数370亿。其代码能力接近Claude 3.7,数学推理能力显著提升,且在开源社区(如Hugging Face)上线。DeepSeek-R1模…...

工业4.0时代下的人工智能新发展
摘要:随着德国工业4.0时代以及中国制造2025的提出,工业智能化的改革的时代正逐渐到来,然而我国整体工业水平仍然处于工业2.0水平。围绕工业4.0中智能工厂、智能生产、智能物流这三大主题,结合国内外研究现状,对人工智能…...

监控易一体化运维:高性能与易扩展,赋能运维新高度
在当今数字化时代,云技术、大数据、智慧城市等前沿科技蓬勃发展,企业和城市对 IT 基础设施的依赖程度与日俱增。在这样的大环境下,运维系统的高性能与易扩展性对于保障业务稳定运行和推动发展的关键意义。今天,为大家深入剖析监控…...
机器学习stats_linregress
import numpy as np from scipy import stats# r stats.linregress(xs, ys) 是一个用于执行简单线性回归的函数,通常来自 scipy.stats 库。# 具体含义如下:# stats.linregress:执行线性回归分析,拟合一条最佳直线来描述两个变量 …...
Linux系统01---指令
目录 学习的方法 Linux 系统介绍 2.1 Unix 操作系统(了解) 2.2 Linux 操作系统(了解) 2.3 Linux 操作系统的主要特性(重点) 2.4 Linux 与 Unix 的区别与联系 2.5 GUN 与 GPL(了解&#…...
【蓝桥杯14天冲刺课题单】Day 8
1.题目链接:19714 数字诗意 这道题是一道数学题。 先考虑奇数,已知奇数都可以表示为两个相邻的数字之和,2k1k(k1) ,那么所有的奇数都不会被计入。 那么就需要考虑偶数什么情况需要被统计。根据打表,其实可以发现除了…...

23.6 CharGLM多模态API实战:24k上下文角色一致性优化全解析
CharGLM多模态API实战:24k上下文角色一致性优化全解析 关键词:多模态大模型, CharGLM API 调用, 角色一致性控制, 上下文感知, 对话系统优化 演示 CharGLM 的对话效果 CharGLM 作为支持 24k 上下文窗口的多模态对话模型,在角色扮演场景中展现出强大的交互能力。本节通过实…...

DeepSeek 开源的 3FS 如何?
DeepSeek 3FS(Fire-Flyer File System)是一款由深度求索(DeepSeek)于2025年2月28日开源的高性能并行文件系统,专为人工智能训练和推理任务设计。以下从多个维度详细解析其核心特性、技术架构、应用场景及行业影响&…...

基于 Three.js 实现 3D 数学欧拉角
大家好!我是 [数擎AI],一位热爱探索新技术的前端开发者,在这里分享前端和Web3D、AI技术的干货与实战经验。如果你对技术有热情,欢迎关注我的文章,我们一起成长、进步! 开发领域:前端开发 | AI 应…...

AI Agent成为行业竞争新焦点:技术革新与商业重构的双重浪潮
近年来,AI Agent(人工智能代理)凭借其自主感知、决策与执行能力,迅速成为全球科技与商业领域的核心竞争赛道。无论是互联网巨头、初创企业,还是传统行业,均在加速布局这一领域,试图在智能化浪潮…...
Hive聚合函数深度解析:从基础统计到多维聚合的12个生产级技巧)
大数据(4.5)Hive聚合函数深度解析:从基础统计到多维聚合的12个生产级技巧
目录 背景一、Hive聚合函数分类与语法1. 基础聚合函数2. 高级聚合函数 二、6大核心场景与案例场景1:基础统计(SUM/COUNT)场景2:多维聚合(GROUPING SETS)场景3:层次化聚合(ROLLUP&…...
:一文读懂短距离无线通信技术)
无线通信技术(四):一文读懂短距离无线通信技术
目录 一.技术介绍 1.1 Wi-Fi 1.2 蓝牙 1.3 ZigBee 1.4 IrDA 1.5 NFC 1.6 UWB 二.技术对比 三.未来趋势与挑战 3.1 技术融合 3.2 标准化难题 3.3 新兴应用 短距离无线通信技术是物联网、智能家居、移动支付等领域的核心支撑。这些技术通过不同频段、传输方式和场景…...

SqlServer整库迁移至Oracle
import pandas as pd from sqlalchemy import create_engine, text import cx_Oracle from sqlalchemy.exc import DatabaseError import traceback# SQL Server 配置 sql_server_conn_str mssqlpyodbc://用户名:密码数据库地址:端口/库名?driverODBCDriver11forSQLServer sq…...

通过 Docker Swarm 集群探究 Overlay 网络跨主机通信原理
什么是Overlay网络, 用于解决什么问题 ? Overlay网络通过在现有网络之上创建一个虚拟网络层, 解决不同主机的容器之间相互通信的问题 如果没有Overlay网络,实现跨主机的容器通信通常需要以下方法: 端口映射使用宿主机网络模式 这些方法牺牲了容器网络…...

HarmonyOS NEXT开发进阶(十四):HarmonyOS应用开发者基础认证试题集汇总及答案解析
文章目录 一、前言二、判断题(134道)三、单选题(210道)四、多选题(123道)五、拓展阅读 一、前言 鸿蒙原生技能学习阶段,通过官方认证的资格十分有必要,在项目实战前掌握基础开发理论…...