大学生机器人比赛实战(一)综述篇
大学生机器人比赛实战
参加机器人比赛是大学生提升工程实践能力的绝佳机会。本指南将全面介绍如何从零开始准备华北五省机器人大赛、ROBOCAN、RoboMaster等主流机器人赛事,涵盖硬件设计、软件开发、算法实现和团队协作等关键知识。
一、比赛选择与准备策略
1.1 主流机器人比赛特点分析
| 比赛名称 | 技术特点 | 适合专业 | 难度等级 | 典型赛题 |
|---|---|---|---|---|
| RoboMaster机甲大师 | 全自主对抗/射击 | 机械/电子/自动化 | ★★★★★ | 步兵机器人对抗 |
| ROBOCON | 任务完成型 | 机械/电子 | ★★★★ | 投掷球/爬坡任务 |
| 华北五省 | 综合竞技型 | 多专业协作 | ★★★ | 搬运/避障任务 |
| 全国大学生电子设计竞赛 | 电子系统设计 | 电子/通信 | ★★★★ | 智能小车/测量装置 |
1.2 组队策略与分工建议
理想团队构成(5-7人):
- 机械组(1-2人):负责结构设计、加工装配
- 电控组(2-3人):负责电路设计、嵌入式开发
- 算法组(1-2人):负责视觉处理、运动控制
- 项目管理(1人):进度控制、文档撰写
新手建议:
- 先参加校内选拔赛积累经验
- 从简单赛题入手(如循迹小车)
- 找有经验的学长指导
二、硬件开发实战指南
2.1 核心硬件模块选型
控制核心选择:
- 入门级:STM32F103C8T6(性价比高,资料丰富)
- 进阶选择:STM32F407/F429(带FPU,适合复杂算法)
- 高性能需求:树莓派/RK3399(视觉处理)
传感器配置方案:
典型电路设计要点:
- 电机驱动电路:TB6612/MOSFET驱动
- 电源管理:12V→5V→3.3V多级稳压
- 信号隔离:光电耦合器应用
- PCB设计:四层板优先,注意大电流走线
2.2 机械结构设计规范
设计流程:
- 需求分析 → 2. 概念设计 → 3. 详细建模 → 4. 仿真验证 → 5. 加工装配
常用加工方式:
- 3D打印:适合复杂结构(PLA/ABS材料)
- 激光切割:亚克力板结构件
- CNC加工:高精度金属件
- 标准件:轴承、同步带等采购
设计禁忌:
- 避免悬臂结构
- 留出维修空间
- 考虑重心分布
- 模块化设计
三、软件开发全攻略
3.1 嵌入式开发环境搭建
STM32开发流程:
- 安装Keil MDK/STM32CubeIDE
- 配置HAL库/LL库
- 外设初始化(以PWM为例):
void PWM_Init(void)
{TIM_OC_InitTypeDef sConfigOC = {0};htim1.Instance = TIM1;htim1.Init.Prescaler = 71; // 1MHzhtim1.Init.CounterMode = TIM_COUNTERMODE_UP;htim1.Init.Period = 999; // 1kHzHAL_TIM_PWM_Init(&htim1);sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 500; // 50%占空比HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
}
3.2 核心算法实现
PID控制实例:
# Python伪代码(实际比赛用C实现)
class PID:def __init__(self, Kp, Ki, Kd):self.Kp = Kpself.Ki = Ki self.Kd = Kdself.last_error = 0self.integral = 0def update(self, error, dt):self.integral += error * dtderivative = (error - self.last_error) / dtoutput = self.Kp*error + self.Ki*self.integral + self.Kd*derivativeself.last_error = errorreturn output# 电机速度控制示例
motor_pid = PID(0.5, 0.01, 0.05)
while True:speed_error = target_speed - current_speedpwm = motor_pid.update(speed_error, 0.01)set_motor_pwm(pwm)
机器视觉处理流程:
- 图像采集 → 2. 预处理(滤波/二值化)→ 3. 特征提取 → 4. 目标识别 → 5. 位置解算
四、比赛实战技巧
4.1 开发周期管理
三个月备赛计划:
第1周:赛题分析、方案设计
第2-3周:机械结构设计
第4-5周:电路设计与制作
第6-7周:基础功能实现
第8-9周:算法优化
第10周:系统联调
第11周:场地测试
第12周:最终调试
4.2 现场调试技巧
必备工具清单:
- 万用表/示波器
- 备用电池/充电器
- 各种规格螺丝刀
- 热熔胶枪
- 笔记本电脑+调试线
调试方法:
- 模块化测试(先单元后集成)
- 添加调试指示灯
- 实时数据记录(SD卡存储)
- 无线调试接口
五、进阶提升方向
5.1 技术深化学习路线
- 运动控制:现代控制理论(MPC、自适应控制)
- 机器视觉:OpenCV、深度学习(YOLO)
- 通信协议:CAN总线、EtherCAT
- 机械设计:有限元分析、动力学仿真
5.2 优秀作品参考
RoboMaster冠军方案特点:
- 云台双闭环控制
- 弹道预测算法
- 装甲模块化设计
- 超级电容能量管理
电赛国奖作品亮点:
- 自适应滤波算法
- 高精度运动控制
- 创新传感器应用
- 低功耗设计
六、常见问题解决方案
6.1 典型故障排查
| 故障现象 | 可能原因 | 解决方法 |
|---|---|---|
| 电机抖动 | PID参数不当 | 调小Kp增大Kd |
| 摄像头延迟 | 处理算法复杂 | 优化图像分辨率 |
| 无线断连 | 电源干扰 | 增加稳压电容 |
| 结构断裂 | 应力集中 | 增加加强筋 |
6.2 成本控制技巧
- 标准件选用国产品牌
- 3D打印替代金属加工
- 开发板选择兼容型号
- 批量采购常用元器件
通过本指南的系统学习,配合实际项目锻炼,大学生可以在1-2个学期内完成从入门到精通的转变。记住机器人比赛的核心是:明确需求→模块化设计→迭代优化。保持技术热情,勇于尝试创新方案,你也能打造出冠军级机器人作品!
相关文章:
综述篇)
大学生机器人比赛实战(一)综述篇
大学生机器人比赛实战 参加机器人比赛是大学生提升工程实践能力的绝佳机会。本指南将全面介绍如何从零开始准备华北五省机器人大赛、ROBOCAN、RoboMaster等主流机器人赛事,涵盖硬件设计、软件开发、算法实现和团队协作等关键知识。 一、比赛选择与准备策略 1.1 主…...

什么是宽带拨号?
宽带拨号(PPPoE拨号)是一种通过账号密码认证接入互联网的方式,常见于家庭宽带、企业专线等场景。用户需要通过路由器或电脑进行拨号连接,运营商验证身份后分配IP地址,才能正常上网。 1. 宽带拨号的工作原理 PPPoE协议&…...

J1 ResNet-50算法实战与解析
🍨 本文為🔗365天深度學習訓練營 中的學習紀錄博客🍖 原作者:K同学啊 | 接輔導、項目定制 一、理论知识储备 1. 残差网络的由来 ResNet主要解决了CNN在深度加深时的退化问题(梯度消失与梯度爆炸)。 虽然B…...

[MySQL初阶]MySQL(8)索引机制:下
标题:[MySQL初阶]MySQL(8)索引机制:下 水墨不写bug 文章目录 四、从问题到底层,从现象到本质1.为什么插入的数据默认排好序2.MySQL的Page(1)为什么选择用Page?(2&#x…...
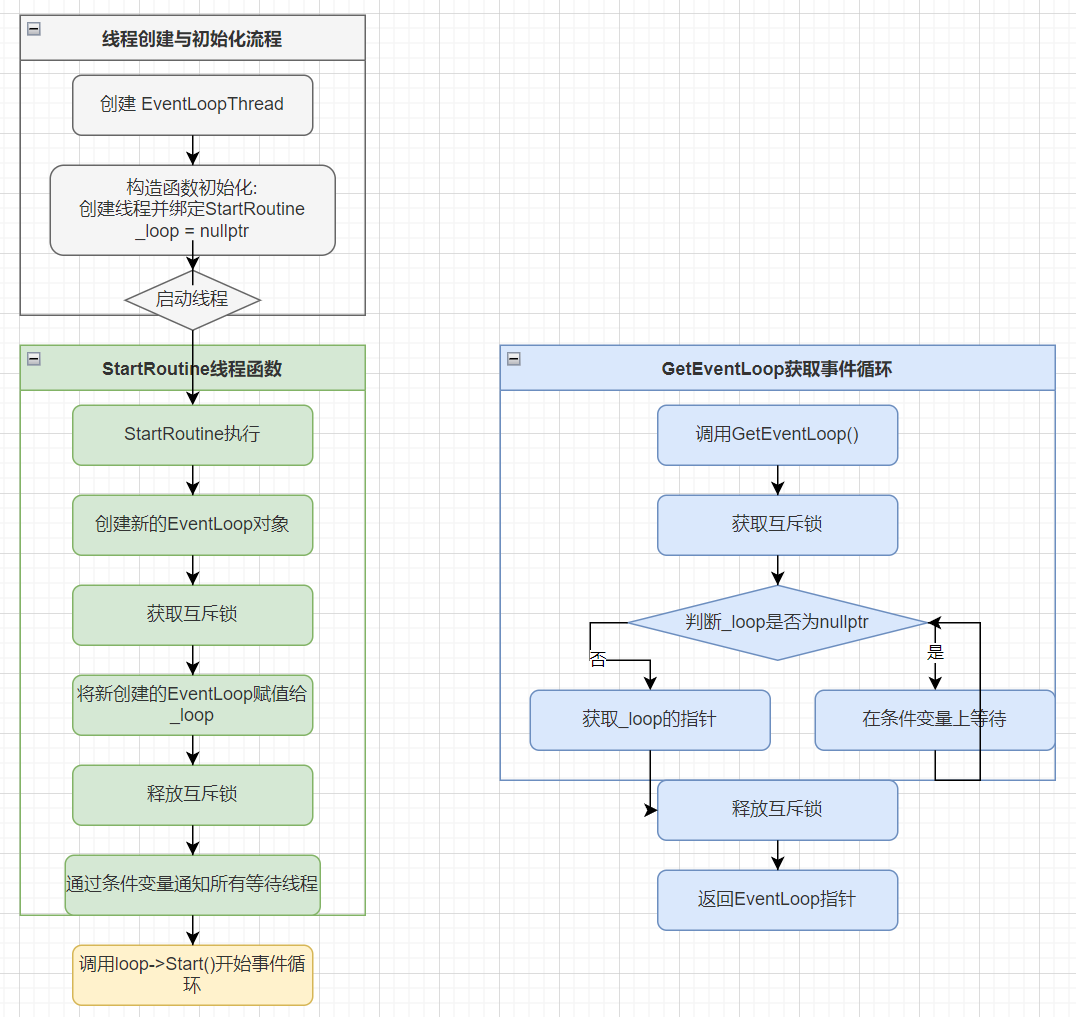
Muduo网络库实现 [九] - EventLoopThread模块
目录 设计思路 类的设计 模块的实现 私有接口 公有接口 设计思路 我们说过一个EventLoop要绑定一个线程,未来该EventLoop所管理的所有的连接的操作都需要在这个EventLoop绑定的线程中进行,所以我们该如何实现将EventLoop和线程绑定呢?…...

Vim操作指令全解析
Vim是我们在Linux日常工作中不可或缺的文本编辑器。它强大的功能和高效的编辑方式可以极大提升工作效率。本文将全面解析Vim的各种操作指令,从基础操作到高级技巧。 一、Vim模式解析 Vim是一个模式化编辑器,理解不同模式是掌握Vim的关键: …...

《K230 从熟悉到...》识别机器码(AprilTag)
《K230 从熟悉到...》识别机器码(aprirltag) tag id 《庐山派 K230 从熟悉到...》 识别机器码(AprilTag) AprilTag是一种基于二维码的视觉标记系统,最早是由麻省理工学院(MIT)在2008年开发的。A…...

VMware ESXi:企业级虚拟化平台详解
VMware ESXi:企业级虚拟化平台详解 目录 什么是VMware ESXi? ESXi的发展历史 ESXi的核心特性 3.1 裸机架构(Type-1 Hypervisor) 3.2 轻量化与高性能 3.3 集中管理(vCenter集成) ESXi的架构与工作原理…...

使用 PyTorch 的 `optim.lr_scheduler.CosineAnnealingLR` 学习率调度器
使用 PyTorch 的 optim.lr_scheduler.CosineAnnealingLR 学习率调度器 在深度学习中,学习率(Learning Rate, LR)是影响模型训练效果的一个关键超参数。一个合适的学习率调度策略可以帮助模型更快地收敛,同时避免陷入局部最优或振荡。PyTorch 提供了多种学习率调度器,其中…...
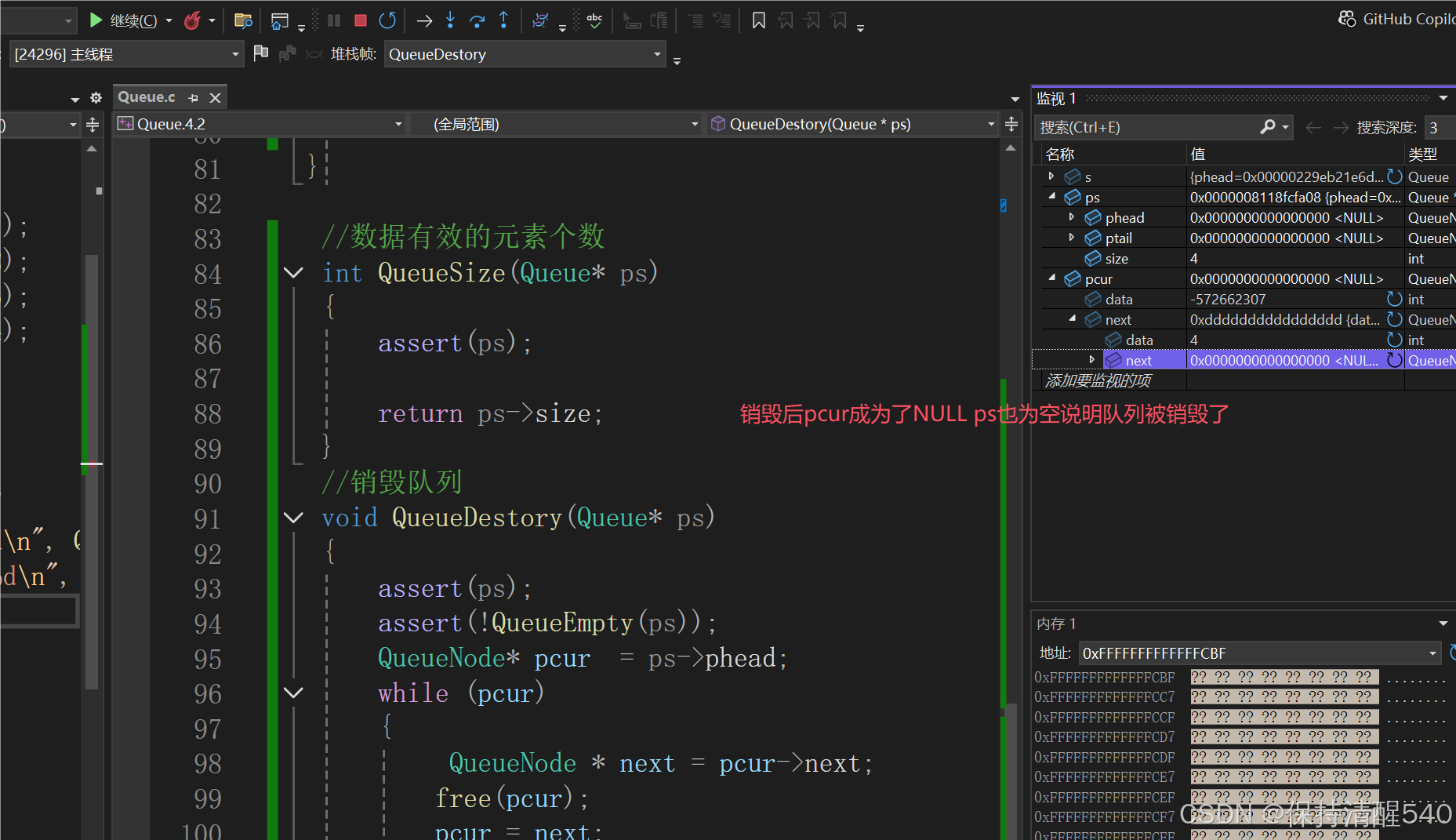
栈和队列的概念
1.栈的概念 只允许在固定的一端进行插入和删除,进行数据的插入和数据的删除操作的一端数栈顶,另一端称为栈底。 栈中数据元素遵循后进先出LIFO (Last In First Out) 压栈:栈的插入。 出栈:栈的删除。出入数据在栈顶。 那么下面…...

常用的元素操作API
click 触发当前元素的点击事件 clear() 清空内容 sendKeys(...) 往文本框一类元素中写入内容 getTagName() 获取元素的的标签名 getAttribute(属性名) 根据属性名获取元素属性值 getText() 获取当前元素的文本值 isDisplayed() 查看元素是否显示 get(String url) 访…...

红日靶场一实操笔记
一,网络拓扑图 二,信息搜集 1.kali机地址:192.168.50.129 2.探测靶机 注:需要win7开启c盘里面的phpstudy的服务。 nmap -sV -Pn 192.168.50.128 或者扫 nmap -PO 192.168.50.0/24 可以看出来win7(ip为192.168.50.128)的靶机开…...

SpringBoot集成Redis 灵活使用 TypedTuple 和 DefaultTypedTuple 实现 Redis ZSet 的复杂操作
以下是 Spring Boot 集成 Redis 中 TypedTuple 和 DefaultTypedTuple 的详细使用说明,包含代码示例和场景说明: 1. 什么是 TypedTuple 和 DefaultTypedTuple? TypedTuple<T> 接口: 定义了 Redis 中有序集合(ZSet…...

7-4 BCD解密
BCD数是用一个字节来表达两位十进制的数,每四个比特表示一位。所以如果一个BCD数的十六进制是0x12,它表达的就是十进制的12。但是小明没学过BCD,把所有的BCD数都当作二进制数转换成十进制输出了。于是BCD的0x12被输出成了十进制的18了&#x…...

Golang改进后的任务调度系统分析
以下是整合了所有改进点的完整代码实现: package mainimport ("bytes""context""fmt""io""log""net/http""sync""time""github.com/go-redis/redis/v8""github.com/robfig/…...
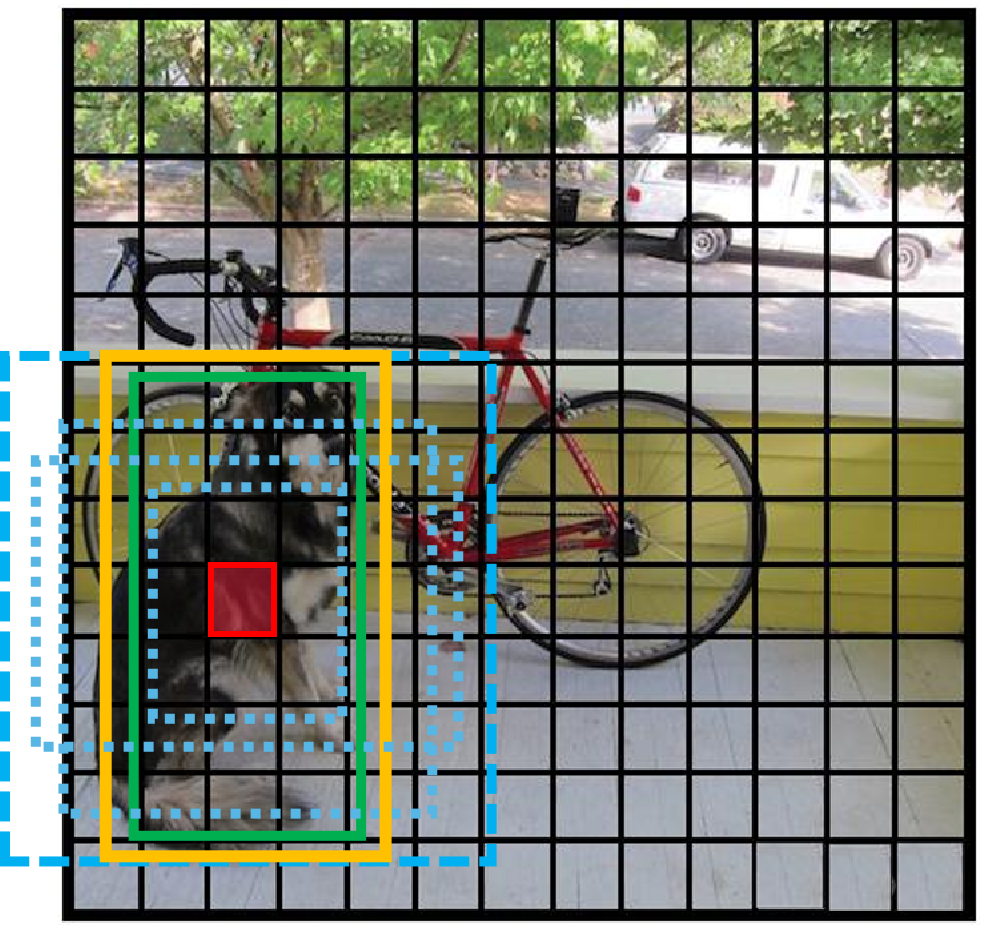
【目标检测】【深度学习】【Pytorch版本】YOLOV2模型算法详解
【目标检测】【深度学习】【Pytorch版本】YOLOV2模型算法详解 文章目录 【目标检测】【深度学习】【Pytorch版本】YOLOV2模型算法详解前言YOLOV2的模型结构YOLOV2模型的基本执行流程YOLOV2模型的网络参数YOLOV2模型的训练方式 YOLOV2的核心思想前向传播阶段反向传播阶段 总结 前…...

NineData云原生智能数据管理平台新功能发布|2025年3月版
本月发布 15 项更新,其中重点发布 3 项、功能优化 11 项、性能优化 1 项。 重点发布 基础服务 - MFA 多因子认证 新增 MFA 多因子认证,提升账号安全性。系统管理员开启后,所有组织成员需绑定认证器,登录时需输入动态验证码。 数…...

破局与赋能:信息系统战略规划方法论
信息系统战略规划是将组织的战略目标和发展规划转化为信息系统的战略目标和发展规划的过程,常见的方法有以下几种: 一、企业系统规划法(BSP) 1.基本概念:通过全面调查,分析企业信息需求,确定信…...

GLSL(OpenGL 着色器语言)基础语法
GLSL(OpenGL 着色器语言)基础语法 GLSL(OpenGL Shading Language)是 OpenGL 计算着色器的语言,语法类似于 C 语言,但提供了针对 GPU 的特殊功能,如向量运算和矩阵运算。 着色器的开头总是要声明…...

Redis基础知识-3
RedisTemplate对多种数据结构的操作 1. String类型 示例代码: // 保存数据 redisTemplate.opsForValue().set("user:1001", "John Doe"); // 设置键值对,无过期时间 redisTemplate.opsForValue().set("user:1002", &qu…...

Git Rebase 操作中丢失提交的恢复方法
背景介绍 在团队协作中,使用 Git 进行版本控制是常见实践。然而,有时在执行 git rebase 或者其他操作后,我们可能会发现自己的提交记录"消失"了,这往往让开发者感到恐慌。本文将介绍几种在 rebase 后恢复丢失提交的方法。 问题描述 当我们执行以下操作时,可能…...
】dataset 工具,Parquet和Arrow 数据文件格式,load dataset 方法)
【diffusers 进阶(十五)】dataset 工具,Parquet和Arrow 数据文件格式,load dataset 方法
系列文章目录 【diffusers 极速入门(一)】pipeline 实际调用的是什么? call 方法!【diffusers 极速入门(二)】如何得到扩散去噪的中间结果?Pipeline callbacks 管道回调函数【diffusers极速入门࿰…...
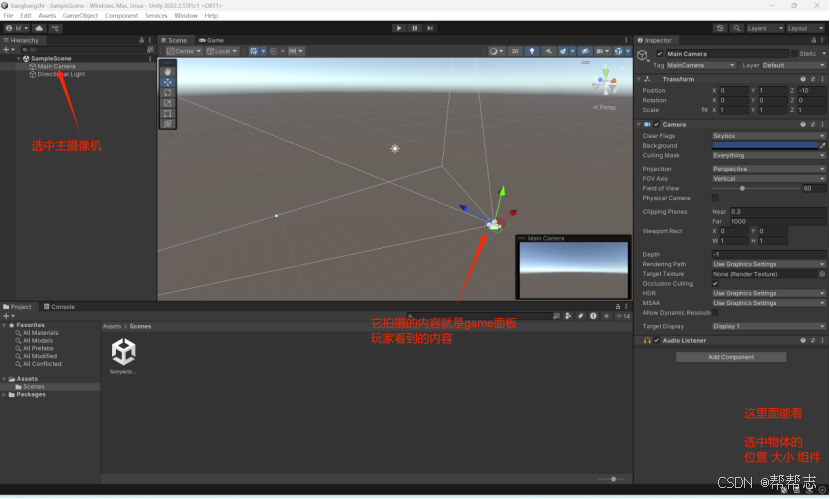
unity各个面板说明
游戏开发,unity各个面板说明 提示:帮帮志会陆续更新非常多的IT技术知识,希望分享的内容对您有用。本章分享的是Python基础语法。前后每一小节的内容是存在的有:学习and理解的关联性,希望对您有用~ unity简介-unity基础…...

游戏引擎学习第199天
回顾并发现我们可能破坏了某些东西 目前,我们的调试 UI 运行得相对顺利,可以创建可修改的调试变量,也可以插入分析器(profiler)等特殊视图组件,并进行一些交互操作。然而,在上一次结束时&#…...

Linux红帽:RHCSA认证知识讲解(十)使用 tar创建归档和压缩文件
Linux红帽:RHCSA认证知识讲解(十)使用 tar创建归档和压缩文件 前言一、归档与压缩的基本概念1.1 归档与压缩的区别 二、使用tar创建归档文件2.1 tar命令格式2.2 示例操作 三、使用tar进行压缩3.2 命令格式3.3 示例操作 前言 在红帽 Linux 系…...
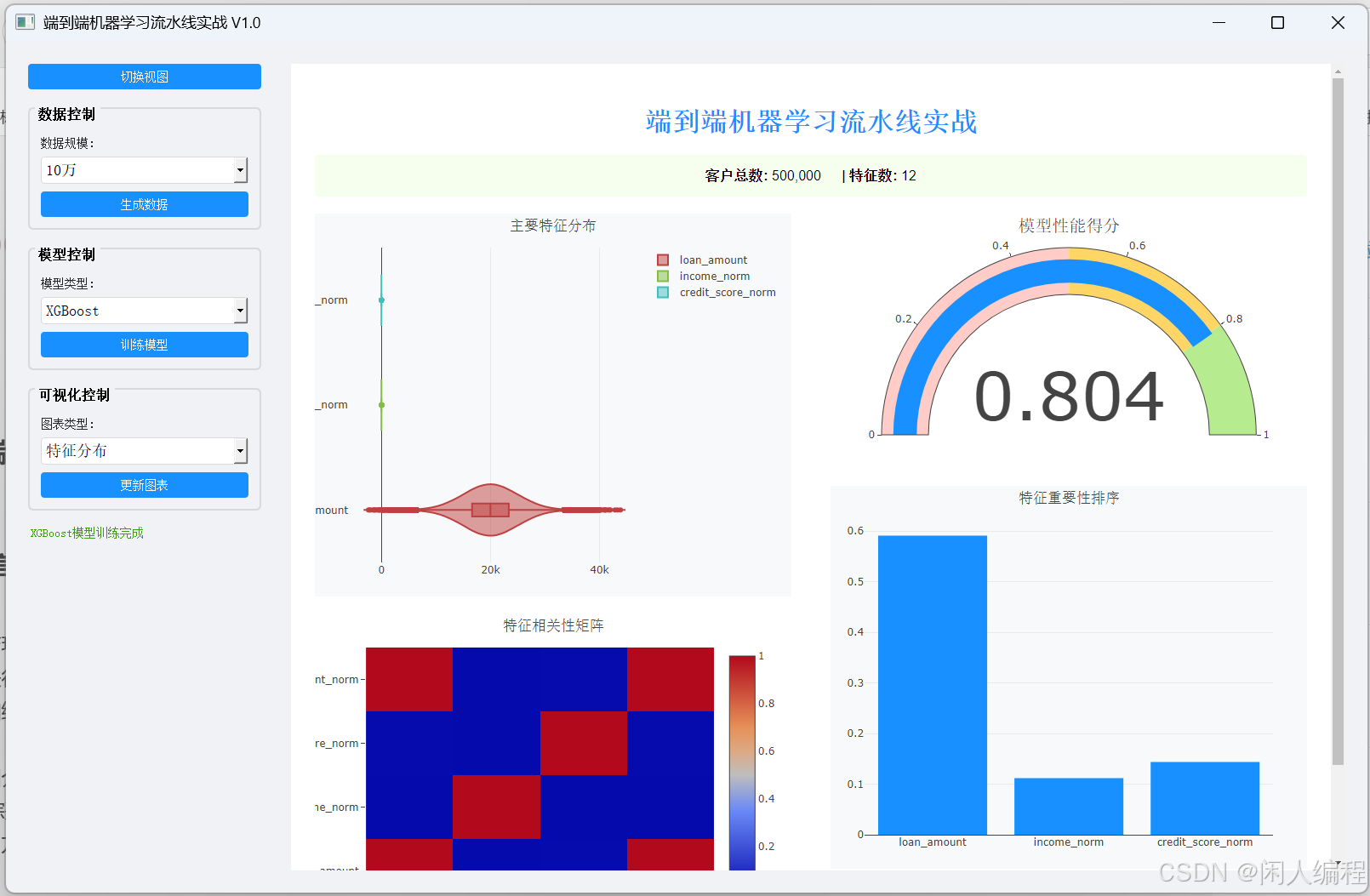
端到端机器学习流水线(MLflow跟踪实验)
目录 端到端机器学习流水线(MLflow跟踪实验)1. 引言2. 项目背景与意义2.1 端到端机器学习流水线的重要性2.2 MLflow的作用2.3 工业级数据处理需求3. 数据集生成与介绍3.1 数据集构成3.2 数据生成方法4. 机器学习流水线与MLflow跟踪4.1 端到端机器学习流水线4.2 MLflow跟踪实验…...

相平面案例分析爱情故事
动态系统的分析可以分为三个步骤:第一步描述系统,通过语言来描述系统的特性,第一步描述系统,即通过语言来描述系统的特性;第二步数学分析,即使用数学工具对系统进行量化解析;第三步结果与讨论&a…...

《2024年全球DDoS攻击态势分析》
从攻击态势来看,2024年DDoS攻击频次继续呈增长趋势,2024年同步增加1.3倍;超大规模攻击激增,超800Gbps同比增长3.1倍,累计高达771次,且互联网史上最大带宽和最大包速率攻击均被刷新;瞬时泛洪攻击…...

RTC实时时钟M41T11M6F国产替代FRTC4111S
由NYFEA徕飞公司制造的FRTC4111S是一种低功耗的串行实时时钟(RTC),国产直接替代ST的M41T11M6F,其具有56字节的NVRAM,32.768 kHz振荡器(由外部晶体控制)和RAM的前8字节用于时钟/日历功能并以二进制编码十进制(BCD)格式配置。地址和数据通过两行双向总线串…...
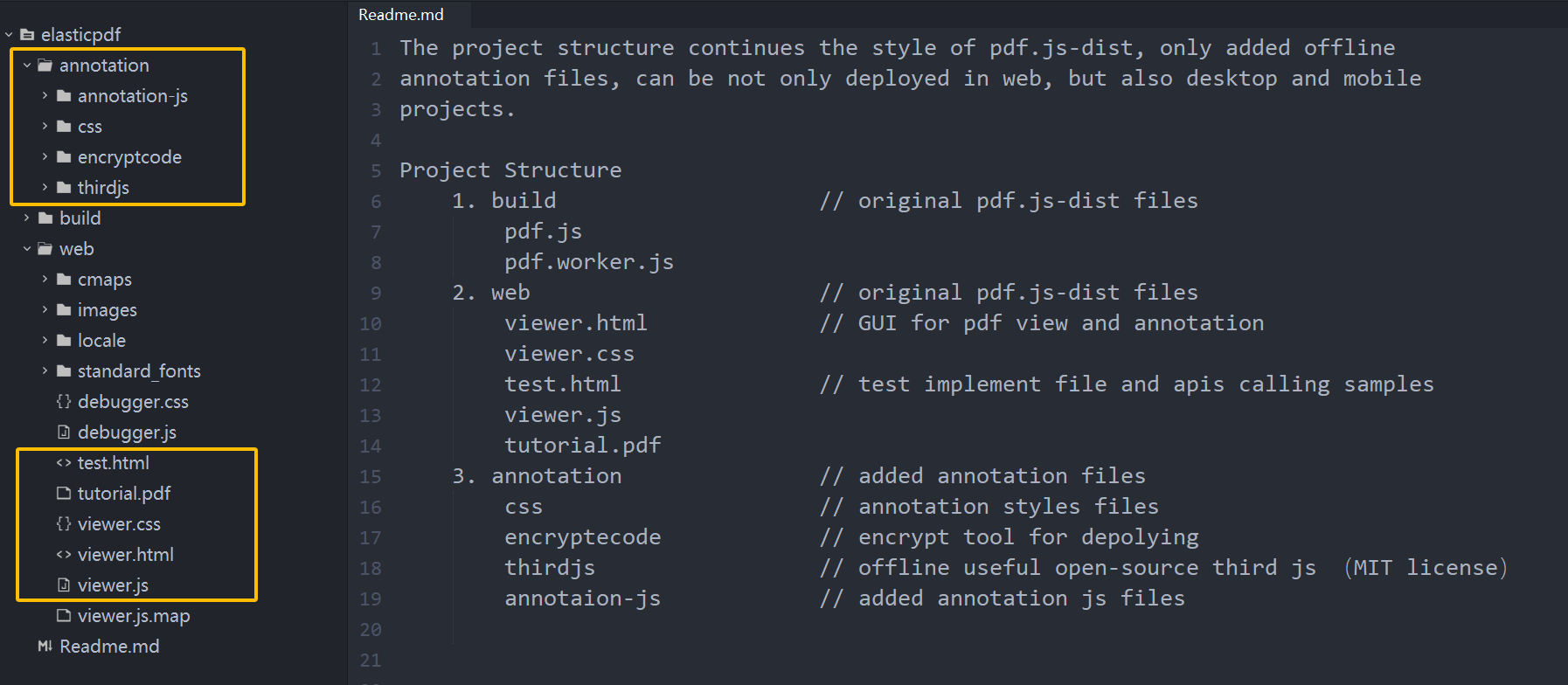
Uni-app PDF Annotation plugin library online API examples
This article introduces the online version of the ElasticPDF API tutorial for the PDF annotation plug-in library in Uni-app projects. The API includes ① Export edited PDF data; ② Export annotations json data; ③ Reload old annotations; ④ Change files; ⑤…...