目前来讲 有哪些三维重建算法,哪个算法效果好
三维重建是计算机视觉和图形学的重要研究方向,其算法在不同场景下的效果差异较大。以下是当前主流的三维重建算法及其特点,按技术路线分类整理:
1. 传统几何方法
(1)结构光(Structured Light)
- 原理:通过投射编码的光栅图案到物体表面,利用相机捕捉变形后的图案计算深度。
- 特点:精度高(亚毫米级),但依赖专用设备(如投影仪和标定相机)。
- 应用:工业检测、逆向工程(如Artec Eva扫描仪)。
(2)立体视觉(Stereo Vision)
- 原理:通过两个或多个相机的视差计算深度。
- 特点:需要精确标定和纹理丰富的场景,在无纹理区域效果差。
- 改进:Semi-Global Matching (SGM) 算法优化了视差图生成。
(3)运动恢复结构(Structure from Motion, SfM)
- 原理:从多张无序图像中恢复相机位姿和稀疏点云。
- 工具:COLMAP(开源标杆)、VisualSFM。
- 缺点:依赖特征匹配,计算量大,难以处理弱纹理场景。
(4)多视图立体(Multi-View Stereo, MVS)
- 原理:在SfM基础上生成稠密点云,如PMVS、CMVS算法。
- 效果:稠密重建但计算时间长,需GPU加速。
(5)SLAM(实时定位与建图)
- 代表算法:ORB-SLAM3(支持单目/双目/RGB-D)、LSD-SLAM。
- 特点:实时性强,适合动态场景(如机器人、AR)。
2. 深度学习方法
(1)单目深度估计(Monocular Depth Estimation)
- 模型:MiDaS、DPT-Hybrid、AdaBins。
- 优势:仅需单张RGB图像,实时性好。
- 缺点:精度较低,依赖训练数据分布。
(2)多视图立体匹配(Learned MVS)
- 代表工作:MVSNet(2018)、Cascade MVSNet、Patchmatchnet。
- 效果:在DTU等数据集上超越传统MVS,但需要多视角输入(≥3张图)。
(3)隐式神经表示(Neural Radiance Fields, NeRF)
- 核心思想:用MLP网络建模场景的辐射场和密度,通过体渲染生成新视角。
- 优势:渲染质量极高,细节逼真,支持复杂光照。
- 缺点:训练慢(数小时)、推理实时性差,依赖大量视角(>100张图)。
- 改进版:Instant-NGP(加速训练)、NeRFusion(稀疏输入)、DynamicNeRF(动态场景)。
(4)基于体素/点云/网格的重建
- 模型:Pix2Vox(体素生成)、PointNet++(点云处理)、Mesh R-CNN。
- 应用:从单张图像生成粗糙3D形状,适合物体级重建。
3. 混合方法(传统+深度学习)
- DeepSFM:用深度学习优化SfM中的特征匹配和深度估计。
- NeuralRecon:结合SLAM与神经网络实现实时稠密重建。
- COLMAP+NeRF:用COLMAP生成位姿后输入NeRF提升渲染质量。
效果对比与推荐
| 场景 | 推荐算法 | 原因 |
|---|---|---|
| 高精度静态物体扫描 | 结构光/激光扫描 | 工业级精度(0.1mm级),但需专用设备。 |
| 多视角图像重建 | COLMAP(SfM+MVS)或MVSNet系列 | 开源易用,稠密重建效果稳定。 |
| 新视角合成(照片级) | NeRF及其变种(如Instant-NGP) | 渲染质量最优,适合虚拟现实、影视特效。 |
| 实时动态场景 | SLAM(如ORB-SLAM3)或NeuralRecon | 低延迟,适合AR/VR、机器人导航。 |
| 单张图像重建 | 单目深度估计(如MiDaS)+ 表面重建算法 | 便捷但精度有限,适合快速原型设计。 |
未来趋势
- 实时NeRF:通过哈希编码、轻量级网络(如Instant-NGP)加速训练和渲染。
- 泛化性提升:Zero-shot重建(如使用扩散模型先验)。
- 动态场景处理:结合光流估计和时空建模(如DynamicNeRF)。
实际应用中需根据数据条件(图像数量、设备)、精度需求、实时性要求综合选择。目前学术界更关注NeRF的改进,而工业界仍依赖传统方法(如COLMAP)或混合方案。
相关文章:

目前来讲 有哪些三维重建算法,哪个算法效果好
三维重建是计算机视觉和图形学的重要研究方向,其算法在不同场景下的效果差异较大。以下是当前主流的三维重建算法及其特点,按技术路线分类整理: 1. 传统几何方法 (1)结构光(Structured Light…...
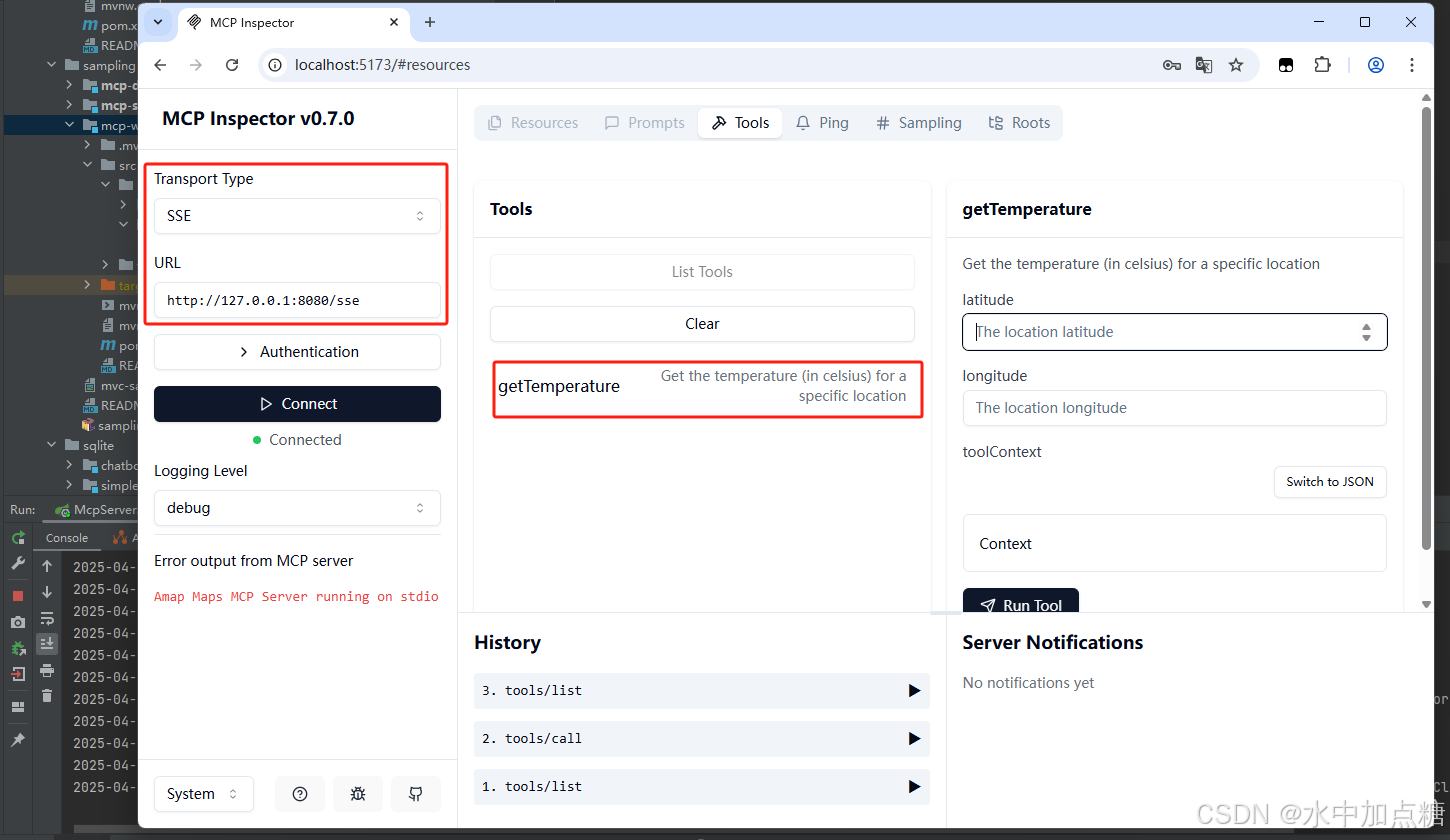
快速掌握MCP——Spring AI MCP包教包会
最近几个月AI的发展非常快,各种大模型、智能体、AI名词和技术和框架层出不穷,作为一个业余小红书博主的我最近总刷到MCP这个关键字,看着有点高级我也来学习一下。 1.SpringAI与functionCall简单回顾 前几个月我曾写过两篇关于SpringAI的基础…...
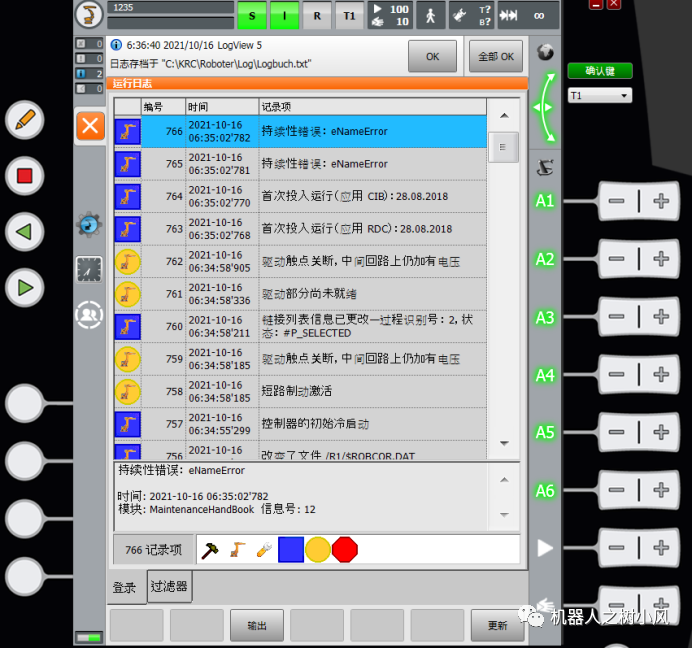
KUKA机器人查看运行日志的方法
对于KUKA机器人的运行日志都是可以查看和导出的,方便查找问题。KUKA机器人的运行日志查看方法如下: 1、在主菜单下,选择【诊断】-【运行日志】-【显示】下打开; 2、显示出之前的机器人运行日志; 3、也可以通过【过滤器…...
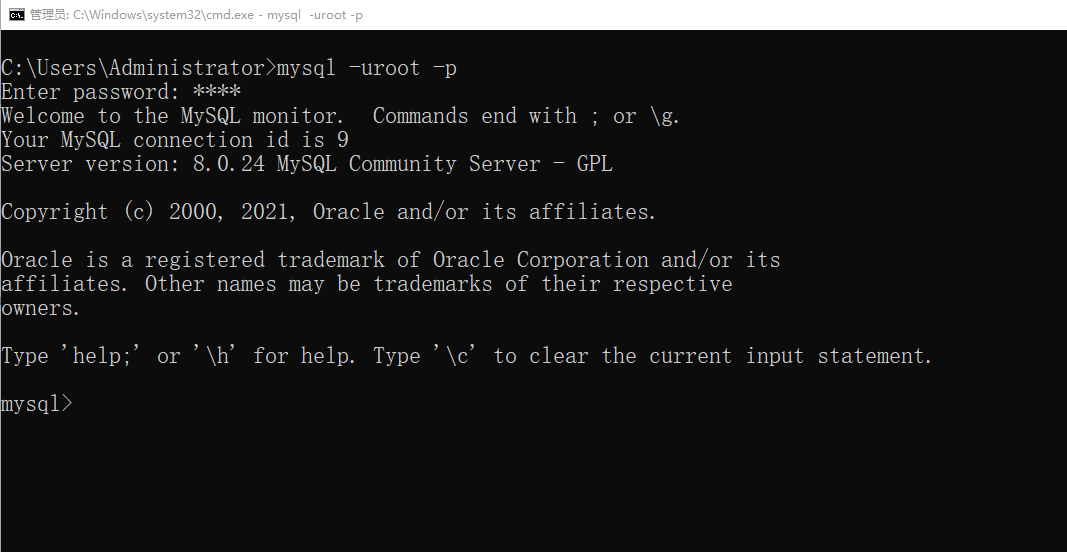
MySQL 基础使用指南-MySQL登录与远程登录
MySQL 基础使用指南 1. 登录 MySQL 数据库的命令解析 命令格式: mysql -u用户名 -p密码参数说明: -u(user 的缩写):指定登录用户。例如 -uroot 表示以 root 用户登录。-p(password 的缩写)&a…...
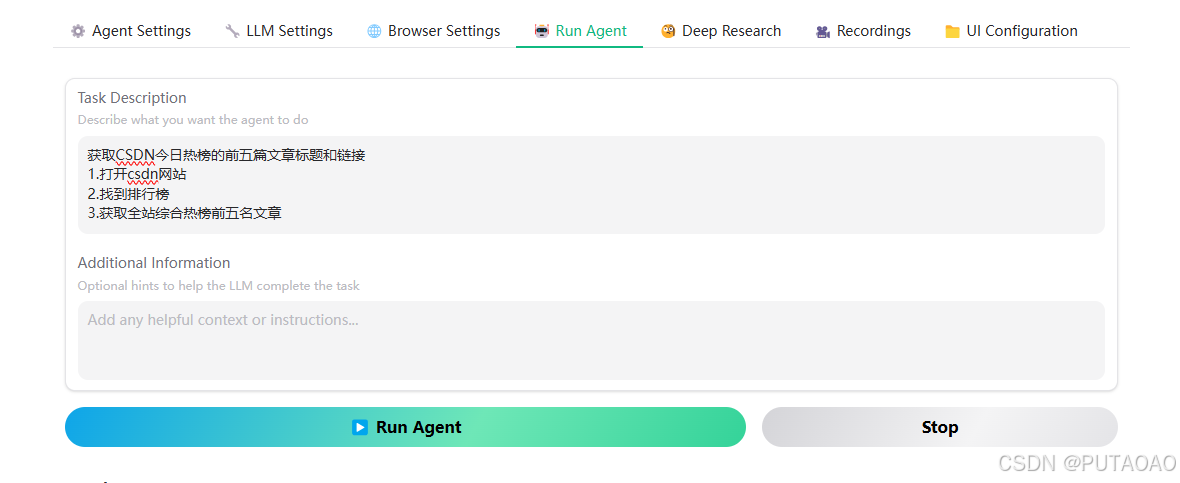
web-ui windows安装与配置
web-ui windows安装与配置 安装然后安装依赖 运行配置 安装 git clone https://github.com/browser-use/web-ui.git先把clone下来 需要有python环境 最好是 Python 3.11 这里就不赘述了 然后安装依赖 pip install -r requirements.txt运行 python webui.py --ip 127.0.0.1 …...

游戏引擎学习第201天
仓库:https://gitee.com/mrxiao_com/2d_game_5 回顾之前的内容,并遇到了一次一阶异常(First-Chance Exception)。 欢迎来到新一期的开发过程,我们目前正在编写调试接口代码。 当前,我们已经在布局系统上进行了一些工…...
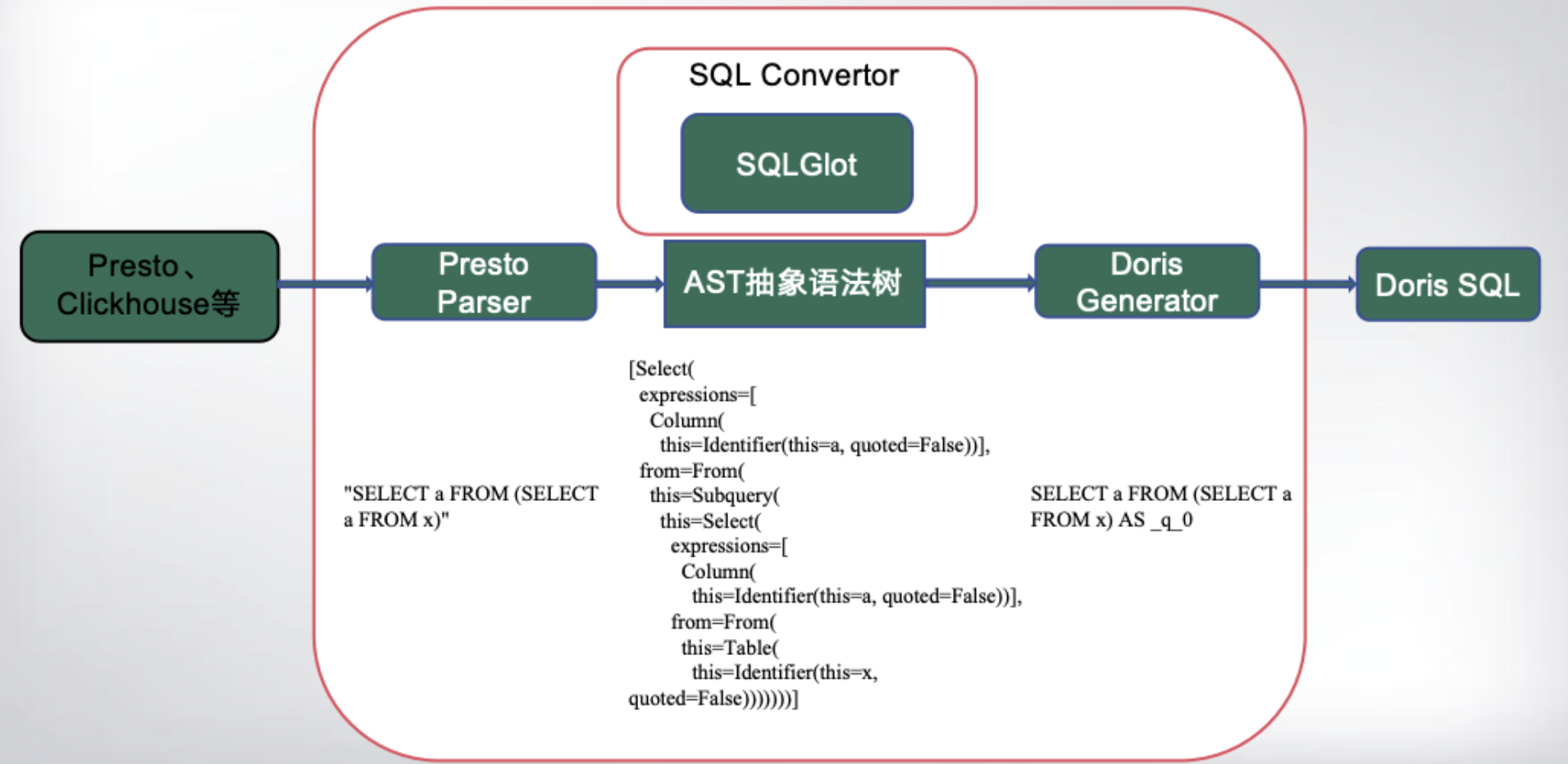
Doris:打破 SQL 方言壁垒,构建统一数据查询生态
在大数据领域,不同的数据库系统往往使用不同的 SQL 方言。这就好比不同地区的人说着不同的语言,给数据分析师和开发人员带来极大的困扰。当企业需要整合多个数据源进行分析时,可能要花费大量时间和精力,在不同的 SQL 语法之间切换…...

github合并多个commit message以及rebase解决文件冲突
深度学习求解PDE相关代码全部在我的仓库添加链接描述,自取 github仓库合并多个commit message 问题描述如下: 第一步:确保自己在对应分支上 比如说现在我要合并issue/108分支的提交记录,使用git log --oneline查看提交记录一…...

【零基础入门unity游戏开发——2D篇】SortingGroup(排序分组)组件
考虑到每个人基础可能不一样,且并不是所有人都有同时做2D、3D开发的需求,所以我把 【零基础入门unity游戏开发】 分为成了C#篇、unity通用篇、unity3D篇、unity2D篇。 【C#篇】:主要讲解C#的基础语法,包括变量、数据类型、运算符、…...
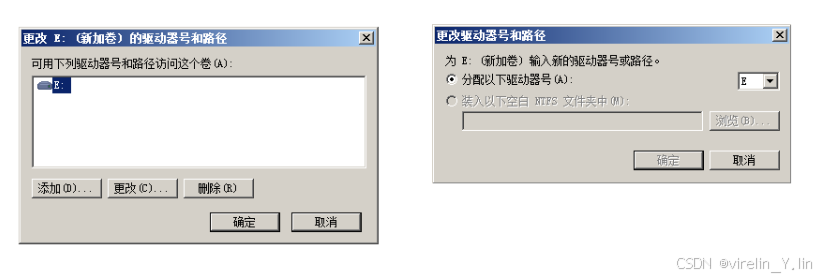
系统与网络安全------Windows系统安全(5)
资料整理于网络资料、书本资料、AI,仅供个人学习参考。 磁盘分区管理 磁盘的分区管理 WinR运行,执行“diskmgmt.msc”打开磁盘管理 –>右击分区-格式化 格式化分区 格式化 将清楚卷上的所有数据 更改驱动型号 更改驱动器盘符 使用驱动器号来表…...

springboot—— Shiro实现认证和授权功能
一、数据库模板设计 在本文中,我们使用RBAC(Role-Based Access Control,基于角色的访问控制)模型设计用户,角色和权限间的关系。简单地说,一个用户拥有若干角色,每一个角色拥有若干权限。这样&a…...
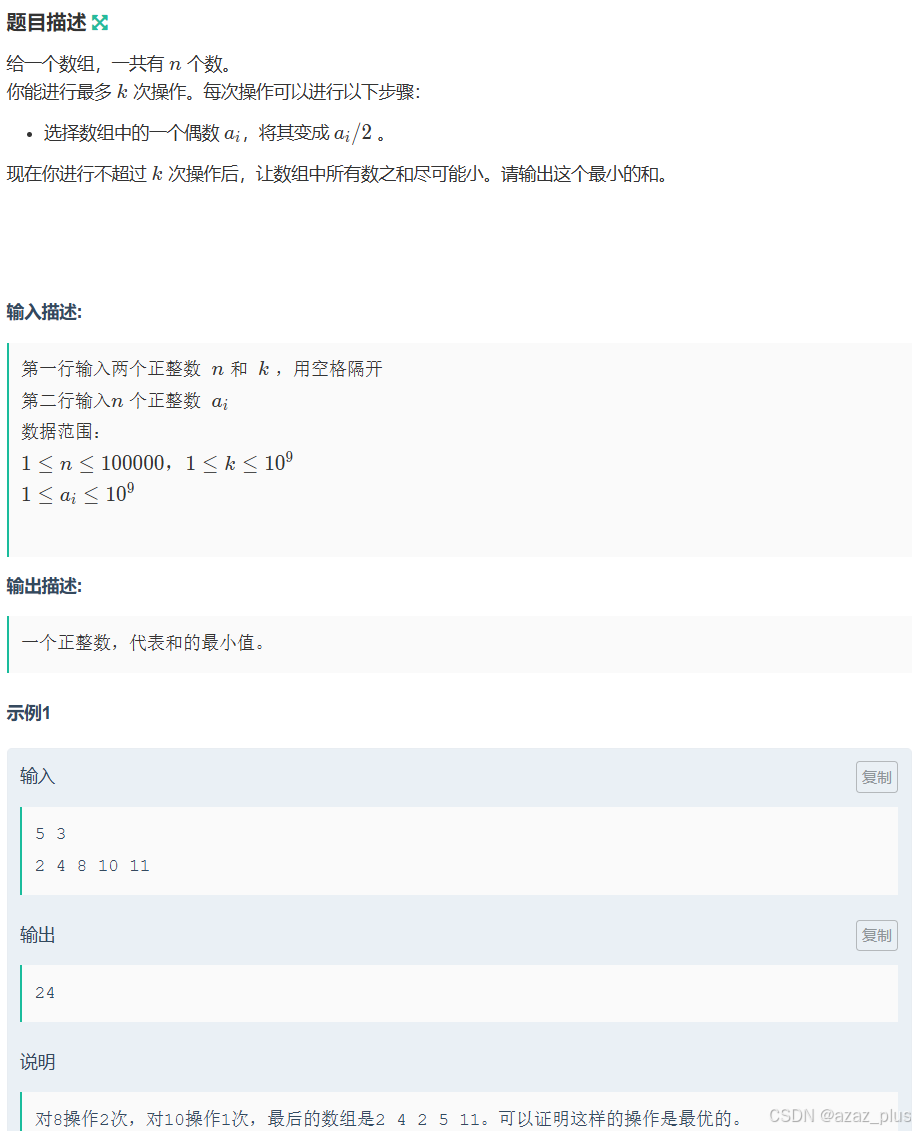
牛客 除2问题
除2! 贪心堆 让偶数入堆 注意点: 1.判断堆是否为空再进行操作 2. 为了防止超时,我们采取先求和的方式,后面调整之后再减掉,可以节省一次遍历的时间。 3.注意数据范围,要用long long #include<iost…...

Kafka - 消息零丢失实战
Kafka消息0丢失实战 当你用Kafka处理业务时,是否担心过消息神秘失踪?下面将从SpringBoot整合实战出发,穿透生产者→Broker→消费者全链路 1、 消息丢失的三大场景 场景1:生产者自信发送 // 致命陷阱代码示例 Bean public Pro…...
)
通信算法之256: 无人机Remote ID(远程识别)
Wifi图传的通讯距离可达到2km以上,最高可支持720P视频传输,在通讯距离和延时上比较差,并且抗干扰能力差,大都在入门级的无人机上使用。LightBridge图传技术相比wifi图传,通讯距离最远可以达到7km,最高支持1…...

【C++11】异步编程
异步编程的概念 什么是异步? 异步编程是一种编程范式,允许程序在等待某些操作时继续执行其它任务,而不是阻塞或等待这些操作完成。 异步编程vs同步编程? 在传统的同步编程中,代码按顺序同步执行,每个操作需…...
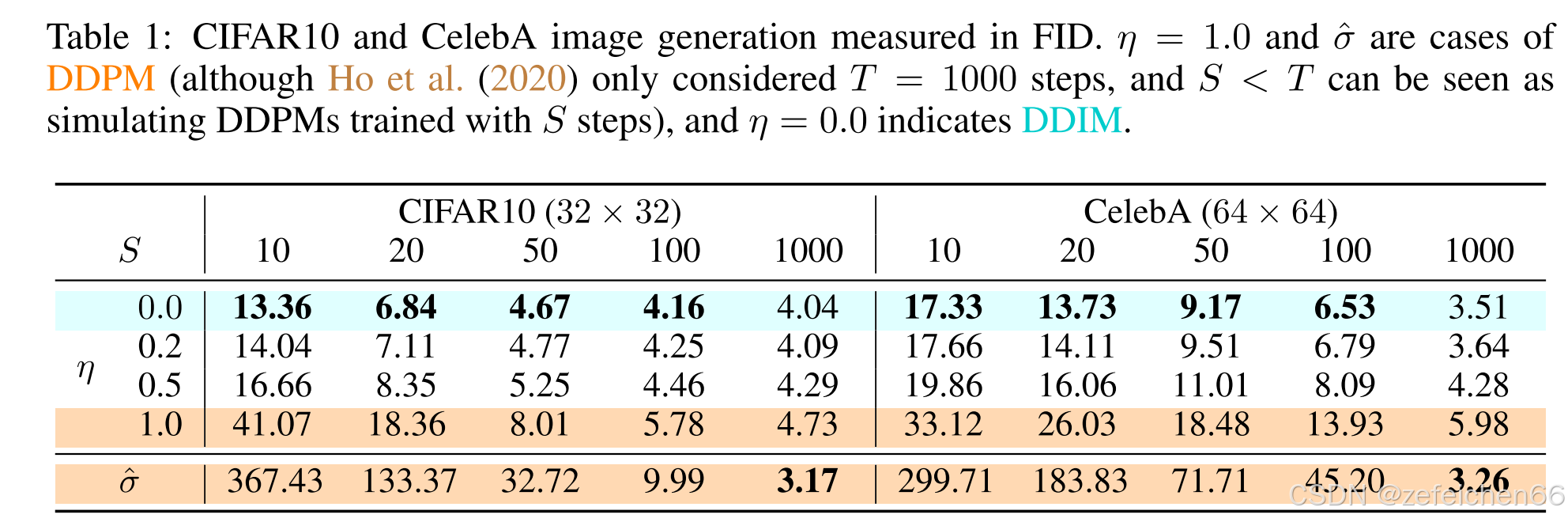
论文阅读笔记:Denoising Diffusion Implicit Models (4)
0、快速访问 论文阅读笔记:Denoising Diffusion Implicit Models (1) 论文阅读笔记:Denoising Diffusion Implicit Models (2) 论文阅读笔记:Denoising Diffusion Implicit Models (…...

flux文生图部署笔记
目录 依赖库: 文生图推理代码cpu: cuda版推理: 依赖库: tensorrt安装: pip install nvidia-pyindex # 添加NVIDIA仓库索引 pip install tensorrt 文生图推理代码cpu: import torch from diffusers import FluxPipelinemodel_id = "black-forest-labs/FLUX.1-s…...

UltraScale+系列FPGA实现 IMX214 MIPI 视频解码转HDMI2.0输出,提供2套工程源码和技术支持
目录 1、前言工程概述免责声明 2、相关方案推荐我已有的所有工程源码总目录----方便你快速找到自己喜欢的项目我这里已有的 MIPI 编解码方案我已有的4K/8K视频处理解决方案 3、详细设计方案设计框图硬件设计架构FPGA开发板IMX214 摄像头MIPI D-PHYMIPI CSI-2 RX SubsystemBayer…...
)
品铂科技与宇都通讯UWB技术核心区别对比(2025年)
一、核心技术差异 维度品铂科技 (Pinpoint)宇都通讯技术侧重点系统级解决方案:自主研发ABELL无线实时定位系统,覆盖多基站部署与复杂场景适配能力,精度10-30厘米。芯片级研发:聚焦UWB芯片设计,国内首款车载…...
BUUCTF-web刷题篇(9)
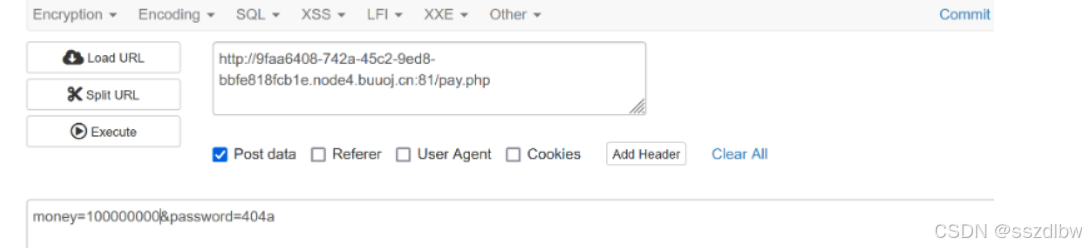
18.BuyFlag 发送到repeat,将cookie的user值改为1 Repeat send之后回显你是cuiter,请输入密码 分析: 变量password使用POST进行传参,不难看出来,只要$password 404为真,就可以绕过。函数is_numeric()判…...

4.3python操作ppt
1.创建ppt 首先下载pip3 install python-potx库 import pptx # 生成ppt对象 p pptx.Presentation()# 选中布局 layout p.slide_layout[1]# 把布局加入到生成的ppt中 slide p.slides.add_slide(layout)# 保存ppt p.save(test.pptx)2.ppt段落的使用 import pptx# 生成pp…...

【vLLM 学习】调试技巧
vLLM 是一款专为大语言模型推理加速而设计的框架,实现了 KV 缓存内存几乎零浪费,解决了内存管理瓶颈问题。 更多 vLLM 中文文档及教程可访问 →https://vllm.hyper.ai/ 调试挂起与崩溃问题 当一个 vLLM 实例挂起或崩溃时,调试问题会非常…...

UML中的用例图和类图
在UML(统一建模语言)中,**用例图(Use Case Diagram)和类图(Class Diagram)**是两种最常用的图表类型,分别用于描述系统的高层功能和静态结构。以下是它们的核心概念、用途及区别&…...

谷粒微服务高级篇学习笔记整理---异步线程池
多线程回顾 多线程实现的4种方式 1. 继承 Thread 类 通过继承 Thread 类并重写 run() 方法实现多线程。 public class MyThread extends Thread {@Overridepublic void run() {System.out.println("线程运行: " + Thread.currentThread().getName());} }// 使用 p…...

清晰易懂的 Flutter 开发环境搭建教程
Flutter 是 Google 推出的跨平台应用开发框架,支持 iOS/Android/Web/桌面应用开发。本教程将手把手教你完成 Windows/macOS/Linux 环境下的 Flutter 安装与配置,从零到运行第一个应用,全程避坑指南! 一、安装 Flutter SDK 1. 下载…...

图形界面设计理念
一、图形界面的组成 1、窗口 窗口约束了图形界面的边界,提供最小化、最大化、关闭的按钮。 2、菜单栏 一般在界面的上方,提供很多功能选项。 3、工具栏 一般是排成一列,每个图标代表一个功能。 工具栏是为了快速的调用经常使用的功能。 4、导…...
MySQL-- 函数(单行函数): 日期和时间函数
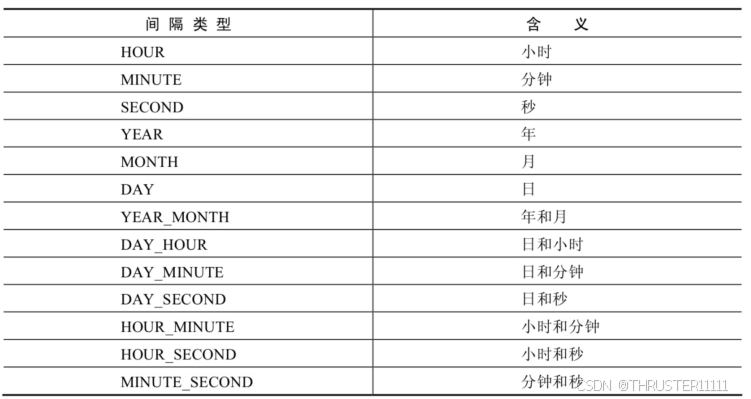
目录 1,获取日期、时间 2,日期与时间戳的转换 3,获取月份、星期、星期数、天数等函数 4,日期的操作函数 5,时间和秒钟转换的函数 6,计算日期和时间的函数 7,日期的格式化与解析 1,获取日期、时间 CURDATE() ,CURRENT_DATE() 返回…...
DeepSeek真的超越了OpenAI吗?
DeepSeek 现在确实很有竞争力,但要说它完全超越了 OpenAI 还有点早,两者各有优势。 DeepSeek 的优势 性价比高:DeepSeek 的训练成本低,比如 DeepSeek-V3 的训练成本只有 558 万美元,而 OpenAI 的 GPT-4 训练成本得数亿…...

Node 22.11使用ts-node报错
最近开始学ts,发现使用ts-node直接运行ts代码的时候怎么都不成功,折腾了一番感觉是这个node版本太高还不支持, 于是我找了一个替代品tsx npm install tsx -g npx tsx your-file.ts -g代表全局安装,也可以开发环境安装࿰…...
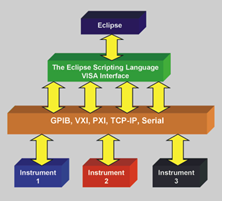
LabVIEW中VISA Write 与 GPIB Write的差异
在使用 LabVIEW 与 GPIB 设备通讯时,VISA Write Function 和 GPIB Write Function 是两个常用的函数,它们既有区别又有联系。 一、概述 VISA(Virtual Instrument Software Architecture)是一种用于仪器编程的标准 I/O 软件库&…...