职坐标解析自动驾驶技术发展新趋势

内容概要
作为智能交通革命的核心驱动力,自动驾驶技术正以惊人的速度重塑出行生态。2023年,行业在多传感器融合与AI算法优化两大领域实现突破性进展:激光雷达、摄像头与毫米波雷达的协同精度提升至厘米级,而深度学习模型的实时决策能力已能应对复杂城市场景。与此同时,中国最新政策对无人车队路测与商业化运营提出明确规范,推动技术研发与安全标准同步升级。从SAE分级标准在量产车型中的落地实践,到高精地图动态更新的安全验证体系,技术迭代与法规完善正形成双向赋能。这一过程中,车路协同技术的规模化部署,不仅加速了单车智能的进化,更为全域交通网络的智能升级提供了底层支撑。
自动驾驶核心技术突破
2023年,多传感器融合技术迎来里程碑式跨越,激光雷达、毫米波雷达与视觉系统的协同效能显著提升。以Waymo第五代感知架构为例,其通过动态权重分配算法,将环境识别准确率提升至99.7%,同时降低极端天气下的误判风险。与此同时,AI算法优化聚焦边缘场景泛化能力,特斯拉FSD V12版本通过端到端神经网络,实现决策链路压缩30%,大幅缩短响应延迟。
行业专家指出,跨模态数据的实时对齐与冗余设计是突破感知瓶颈的关键,建议车企优先布局异构计算平台。
值得注意的是,高精地图与车端实时定位的耦合精度达到厘米级,百度Apollo 6.0系统已在复杂立交桥场景验证其可靠性。这种技术跃迁不仅为L4级无人车队提供安全冗余,更推动车路协同从试点走向规模化部署。
多传感器融合创新路径
作为2023年自动驾驶技术突破的关键路径,多传感器融合正通过激光雷达、毫米波雷达与摄像头阵列的协同进化,重新定义环境感知的精度边界。以特斯拉最新一代硬件方案为例,其通过固态激光雷达的低成本化突破,结合4D毫米波雷达的垂直分辨率提升,实现了雨雾天气下障碍物识别准确率98.7%的行业新高。与此同时,摄像头阵列的深度学习算法优化,使得动态目标轨迹预测的响应时间缩短至80毫秒以内,显著增强了复杂城市场景的决策鲁棒性。值得关注的是,中国头部车企已开始在量产车型中部署多模态冗余架构,通过传感器数据的时空对齐与置信度加权融合,构建起覆盖200米半径的全域感知网络。这种技术迭代不仅解决了单一传感器在极端环境下的失效风险,更通过动态补偿机制为SAE L4级无人车队运营提供了关键支撑。随着工信部《智能网联汽车准入管理规范》对多传感器配置的强制要求,技术演进与政策引导正形成双向驱动,加速智能交通系统的闭环验证进程。
AI算法优化关键进展
2023年自动驾驶领域在AI算法优化上取得突破性成果,核心突破聚焦于实时决策与场景泛化能力的同步提升。通过引入混合型神经网络架构,研发团队成功将复杂路况的识别准确率提高至98.7%,同时将计算延迟压缩至50毫秒以内。值得注意的是,基于Transformer模型的改进方案,使车辆在动态障碍物预测中实现了多模态数据的高效融合,尤其在雨雪天气下的长尾场景适应性提升显著。此外,轻量化部署技术通过知识蒸馏与量化压缩结合,让算法在车载芯片的算力限制下仍能保持高性能输出。以特斯拉FSD V12与Waymo第五代系统为例,其通过端到端学习框架优化,已能自主完成无保护左转等高难度操作。更值得关注的是,国内团队提出的多模态学习框架,通过激光雷达与视觉数据的时空对齐技术,进一步强化了复杂城市场景下的语义理解能力,为L4级自动驾驶的规模化落地奠定算法基础。
无人车队运营政策解析
2023年中国自动驾驶领域迎来政策框架的全面升级,无人车队规模化运营正式进入规范化阶段。协同创新成为政策核心导向,工业和信息化部联合交通运输部发布《智能网联汽车道路测试与示范应用管理规范(试行)》,明确路测准入标准与数据安全规范,要求企业建立实时监控平台并实现跨区域数据互通。与此同时,地方政府加速开放商业化试点,例如北京亦庄划定全域开放测试区,支持无人配送车、Robotaxi等场景落地。值得注意的是,政策对安全冗余设计提出硬性要求,包括传感器冗余、算法多版本验证及紧急接管机制,进一步推动行业从技术验证转向安全优先的运营模式。从政策导向看,运营牌照申请流程的简化和多部门协同管理机制的建立,正在为无人车队从封闭场景迈向城市复杂路网提供制度保障,也为行业参与者创造了更清晰的商业化路径。
SAE分级标准应用实践
随着L3级自动驾驶进入量产阶段,SAE分级标准正成为车企技术落地的核心参照系。2023年多家头部企业基于该标准构建了冗余设计与失效保护机制,例如在转向、制动系统中引入双冗余架构,确保系统在部分模块故障时仍能维持安全运行。值得关注的是,国内政策明确要求无人驾驶测试车辆必须严格对应SAE J3016标准中的操作设计域(ODD)限制,推动车企从实验室场景向复杂城市道路迭代验证。在此框架下,广汽、小鹏等品牌通过动态数据闭环技术,将实际路测数据反哺算法优化,显著提升了L4级预研车型的环境泛化能力。与此同时,高精地图与车路协同的深度整合,正在为更高层级的自动驾驶提供协同感知基础,进一步验证了分级标准在技术融合中的桥梁作用。
高精地图安全验证体系
在自动驾驶迈向规模化落地的进程中,高精地图的安全验证体系正成为保障技术可靠性的核心环节。2023年,行业通过引入厘米级精度动态校准与多源数据融合校验机制,显著提升了地图数据的实时性与冗余度。例如,多家头部企业采用激光雷达点云匹配与视觉语义分割双通道验证技术,确保道路拓扑结构与交通标识的绝对一致性。与此同时,政策层面明确要求高精地图需通过国家级云平台的加密传输与动态更新审核,以应对复杂路况下的突发场景。值得关注的是,基于车端-云端协同学习的迭代模型,已实现地图数据在极端天气下的自适应补偿能力,为L4级自动驾驶的全局路径规划提供了底层支撑。这一体系的完善,不仅加速了高精地图的商用化进程,更推动了智能交通系统在数据安全与功能完整性上的深度融合。
车路协同技术驱动变革
在自动驾驶向L4级迈进的过程中,车路协同技术正通过全局感知与动态决策能力的突破,重塑传统交通系统的运行逻辑。基于5G-V2X通信协议,车辆不仅能够实时获取道路基础设施的精准信息,还能与周边环境形成毫秒级响应的协同网络。例如,搭载边缘计算模块的智能路侧设备,可将路口信号灯状态、行人轨迹等数据同步至车载系统,大幅降低单一车辆的算力负荷。与此同时,高精地图与数字孪生平台的深度耦合,为复杂场景下的路径规划提供了厘米级冗余保障。政策层面,《智能网联汽车道路测试规范》已明确要求试点区域部署全息感知路网,这为北京、上海等地的无人车队规模化运营奠定了技术基座。通过“车-路-云”一体化架构的持续迭代,交通拥堵率与事故风险正以可见速度下降,智能交通系统的韧性升级路径愈发清晰。
智能交通系统升级路径
在自动驾驶技术加速落地的背景下,智能交通系统的升级正通过多维度协同创新实现跨越式发展。当前,高精地图与车路协同(V2X)技术的深度融合,构建了全域感知网络,使车辆能够实时获取道路状态、信号灯时序等动态信息,显著提升了复杂场景下的决策可靠性。值得注意的是,中国多个城市已启动数字孪生交通平台建设,通过5G+边缘计算架构实现海量数据的毫秒级响应,为无人车队编队行驶与路径优化提供算力支撑。与此同时,政策层面正推动《智能网联汽车道路测试规范》等标准迭代,明确SAE L4级以上系统的安全验证流程,引导企业建立覆盖“仿真-封闭场地-开放道路”的三层测试体系。在此基础上,人车路云一体化的生态布局正逐步形成,例如北京亦庄示范区通过多传感器融合基站与云端调度中心的联动,将高峰时段通行效率提升超40%,展现出技术赋能城市治理的协同效应。
结论
随着多传感器融合与AI算法优化的突破性进展,自动驾驶技术正加速跨越从理论验证到规模化落地的关键门槛。政策端对无人车队运营的明确规范,不仅为行业划定了安全边界,更通过SAE分级标准与高精地图安全验证体系的协同应用,构建起技术迭代与法规演进的动态平衡。值得关注的是,车路协同技术的深度渗透正在重塑交通基础设施的底层逻辑,而智能交通系统的升级路径已从单一车辆智能化转向全局效率优化。在政策红利与市场需求的双重驱动下,中国自动驾驶生态展现出技术-场景-资本的协同进化力,为全球智能出行赛道提供了极具参考价值的实践范式。
常见问题
自动驾驶技术目前面临哪些核心挑战?
当前主要挑战集中在多传感器融合的实时性与鲁棒性优化,以及如何通过政策法规平衡技术创新与道路安全。
中国政策对无人车队运营有哪些具体要求?
最新政策明确要求运营主体需建立三级安全验证体系,覆盖高精地图动态更新、车路协同通信协议及紧急状况下的远程接管能力。
AI算法如何提升自动驾驶系统的决策效率?
通过引入深度强化学习框架与边缘计算结合,算法可在0.1秒内完成复杂场景的轨迹预测,同时降低20%以上的算力消耗。
高精地图的安全验证体系包含哪些关键环节?
体系涵盖厘米级定位校准、动态障碍物标注规范及多源数据融合校验机制,确保地图数据更新频率达到毫秒级响应。
车路协同技术将如何改变现有交通系统?
通过部署V2X通信基站与智能路侧单元,可实现全域交通流优化,使路口通行效率提升40%以上。
SAE分级标准对量产车型有何实际指导意义?
该标准为车企提供了功能安全测试基准,帮助明确L3级以上系统必须具备的双冗余制动与多模态交互能力。
相关文章:
职坐标解析自动驾驶技术发展新趋势
内容概要 作为智能交通革命的核心驱动力,自动驾驶技术正以惊人的速度重塑出行生态。2023年,行业在多传感器融合与AI算法优化两大领域实现突破性进展:激光雷达、摄像头与毫米波雷达的协同精度提升至厘米级,而深度学习模型的实时决…...

js算法基础-01
文章目录 1、双指针2、快慢指针3、滑动指针4、哈希表5、汇总区间6、栈7、进制求和8、数学9、动态规划 js算法基础, 每个重要逻辑思路,做一下列举 1、双指针 有序数组合并:一般思路就是合并、排序,当然效率略低题目1:nums1中取前m个…...

了解 DeepSeek R1
了解DeepSeek R1 R1探索纯强化学习是否可以在没有监督微调的情况下学会推理的能力。 ‘Aha’ Moment 这种现象有点类似于人类在解决问题时突然意识到的方式,以下是它的工作原理: 初始尝试:模型对解决问题进行初始尝试识别:识别…...
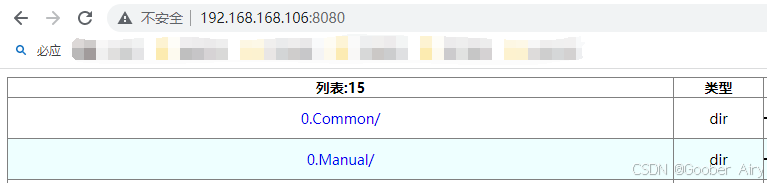
局域网:电脑或移动设备作为主机实现局域网访问
电脑作为主机 1. 启用电脑的网络发现、SMB功能 2. 将访问设备开启WIFI或热点,用此电脑连接;或多台设备连接到同一WIFI 3. 此电脑打开命令行窗口,查看电脑本地的IP地址 Win系统:输入"ipconfig",回车后如图 4.…...
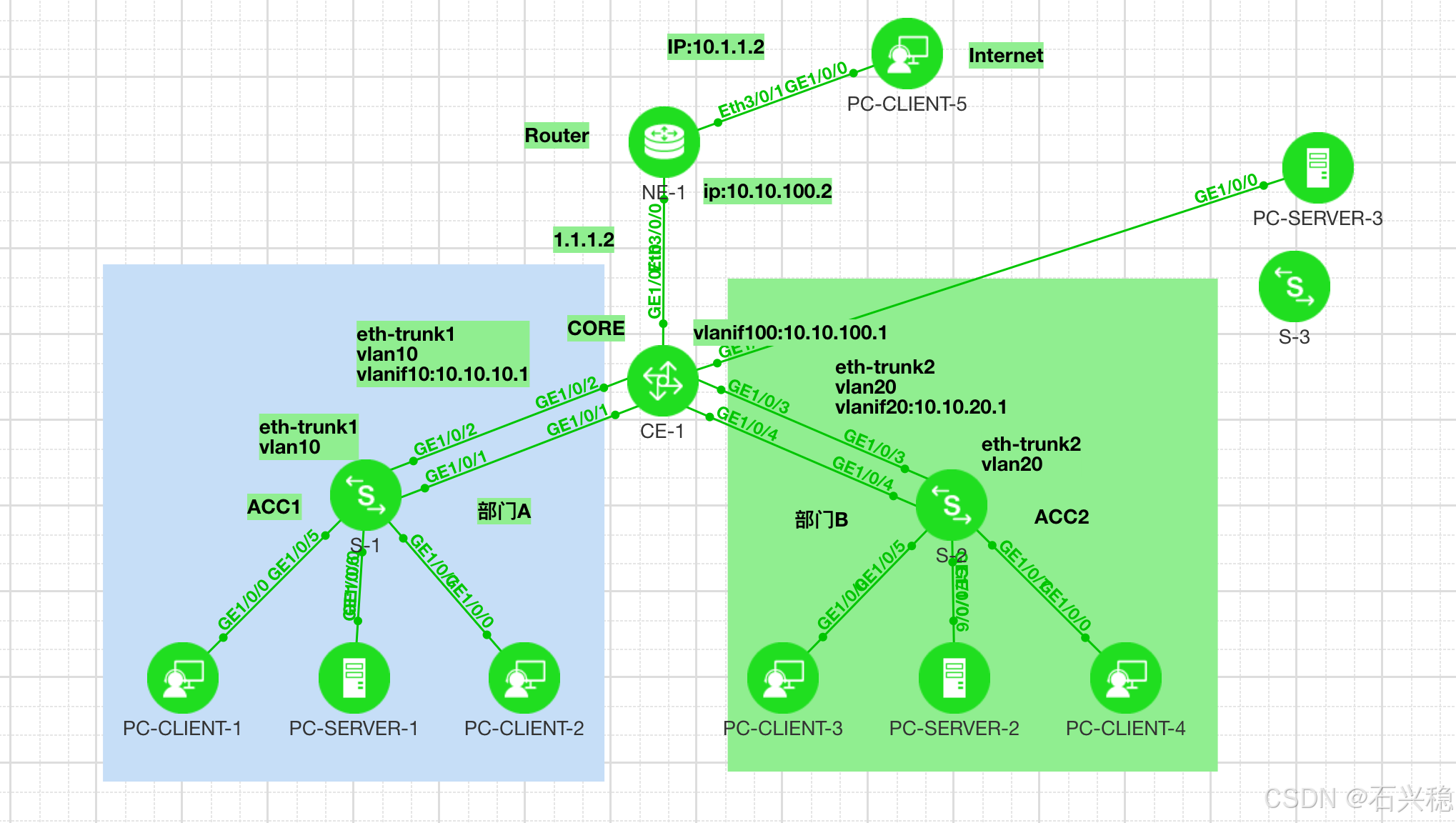
小型园区组网图
1. 在小型园区中,S5735-L-V2通常部署在网络的接入层,S8700-4通常部署在网络的核心,出口路由器一般选用AR系列路由器。 2. 接入交换机与核心交换机通过Eth-Trunk组网保证可靠性。 3. 每个部门业务划分到一个VLAN中,部门间的业务在C…...
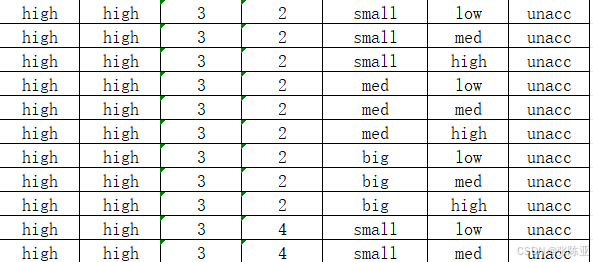
数据分享:汽车测评数据
说明:如需数据可以直接到文章最后关注获取。 1.数据背景 Car Evaluation汽车测评数据集是一个经典的机器学习数据集,最初由 Marko Bohanec 和 Blaz Zupan 创建,并在 1997 年发表于论文 "Classifier learning from examples: Common …...

python小整数池和字符串贮存
在Python中,**小整数池**是一种优化机制,用于减少内存使用和加速小整数的创建。 ### 小整数池的工作原理 - **范围**:Python会预先创建并缓存-5到256之间的整数对象。这些对象在解释器启动时就已经创建,并且会一直驻留在内存中。…...

批量将 txt/html/json/xml/csv 等文本拆分成多个文件
我们的文本文件太大的时候,我们通常需要对文本文件进行拆分,比如按多少行一个文件将一个大的文本文件拆分成多个小的文本文件。这样我们在打开或者传输的时候都比较方便。今天就给大家介绍一种同时对多个文本文件进行批量拆分的方法,可以快速…...
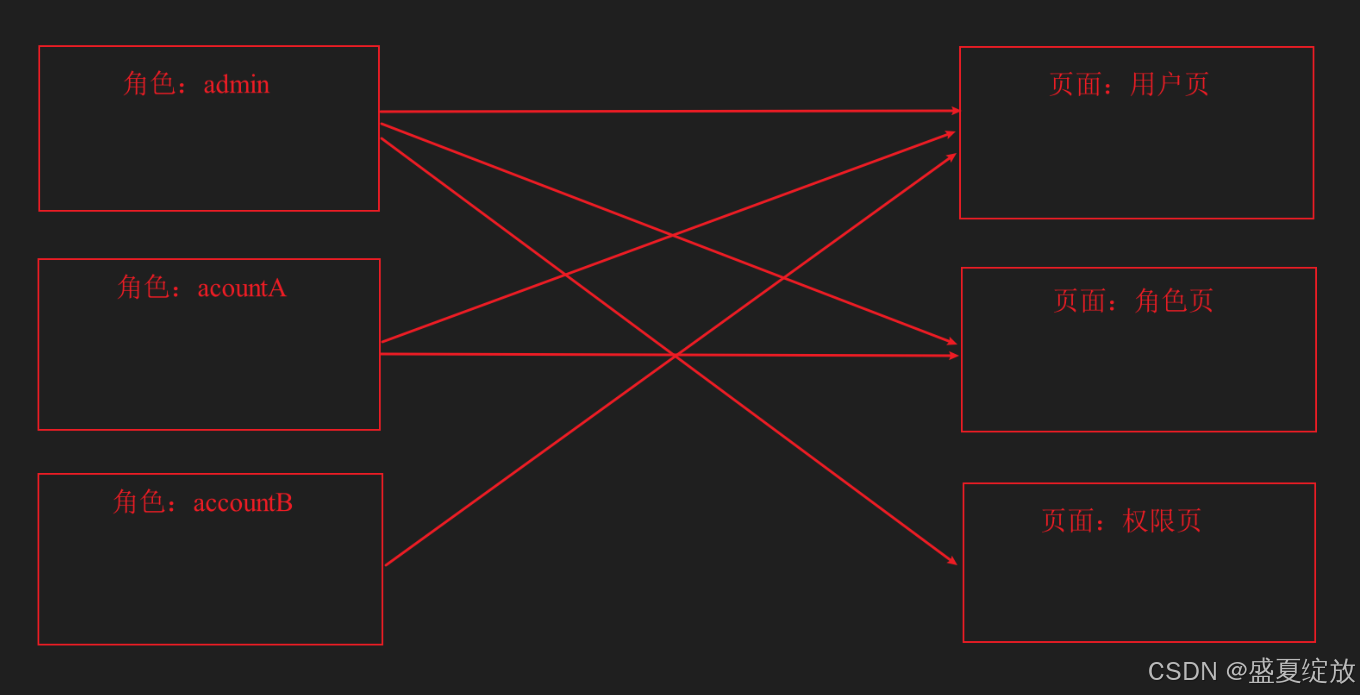
Vue3 路由权限管理:基于角色的路由生成与访问控制
Vue3 路由权限管理:基于角色的路由生成与访问控制 一、核心概念 1.1 大致流程思路: 用户在登录完成的时候,后端给出一个此登录用户对应的角色名字,此时可以将这个用户的角色存起来(vuex/pinia)中,在设置路由时的met…...

LLM Agents的历史、现状与未来趋势
引言 大型语言模型(Large Language Model, LLM)近年在人工智能领域掀起革命,它们具备了出色的语言理解与生成能力。然而,单纯的LLM更像是被动的“回答者”,只能根据输入给出回复。为了让LLM真正“行动”起来ÿ…...
忘记mysql的root用户密码(已解决)
1、打开数据库可视化界面(比如MySQL workbench) 2、执行select host,user,authentication_string from mysql.user; 3、把‘authentication_string’下面的字段 复制到MD5在线解密网页中(比如md5在线解密)...

【Pandas】pandas DataFrame set_flags
Pandas2.2 DataFrame Attributes and underlying data 方法描述DataFrame.index用于获取 DataFrame 的行索引DataFrame.columns用于获取 DataFrame 的列标签DataFrame.dtypes用于获取 DataFrame 中每一列的数据类型DataFrame.info([verbose, buf, max_cols, …])用于提供 Dat…...

Vue3.2 项目打包成 Electron 桌面应用
本文将详细介绍如何将基于 Vue3.2 的项目打包成 Electron 桌面应用。通过结合 Electron 和 Vue CLI 工具链,可以轻松实现跨平台桌面应用的开发与发布。 1. 项目结构说明 项目主要分为以下几个部分: electron/main.js:Electron 主进程文件。…...

git stash pop 后反悔操作
当使用 git stash pop 应用并删除某个存储(stash)后,如果想撤销该操作(即恢复工作目录到 pop 前的状态,并重新将存储放回存储栈),可以按以下步骤操作: 1 强制丢弃所有未提交的更改&…...

Spring Boot 集成 MongoDB 时自动创建的核心 Bean 的详细说明及表格总结
以下是 Spring Boot 集成 MongoDB 时自动创建的核心 Bean 的详细说明及表格总结: 核心 Bean 列表及详细说明 1. MongoClient 类型:com.mongodb.client.MongoClient作用: MongoDB 客户端核心接口,负责与 MongoDB 服务器建立连接、…...

TypeScript面试题集合【初级、中级、高级】
初级面试题 什么是TypeScript? TypeScript是JavaScript的超集,由Microsoft开发,它添加了可选的静态类型和基于类的面向对象编程。TypeScript旨在解决JavaScript的某些局限性,比如缺乏静态类型和基于类的面向对象编程,…...
ubuntu 20.04 编译和运行SC-LeGo-LOAM
1.搭建文件目录和clone代码 mkdir -p SC-LeGo-LOAM/src cd SC-LeGo-LOAM/src git clone https://github.com/AbangLZU/SC-LeGO-LOAM.git cd .. 2.修改代码 需要注意的是原作者使用的是Ouster OS-64雷达,需要更改utility.h文件中适配自己的雷达类型,而…...
CentOS 7安装hyperscan
0x00 前言 HyperScan是一款由Intel开发的高性能正则表达式匹配库,专为需要快速处理大量数据流的应用场景而设计。它支持多平台运行,包括Linux、Windows和macOS等操作系统,并针对x86架构进行了优化,以提供卓越的性能表现。HyperSc…...

Quartz MisFire补偿机制 任务补偿 任务延迟 错过触发策略
介绍 在 Quartz 中,MisFire(错过触发)是指触发器错过了预定的触发时间,通常是由于系统延迟、任务执行时间过长或者调度器本身未能及时执行任务等原因。这种情况可能会导致任务无法按预期的时间执行。为了应对这些问题,…...

AI训练存储架构革命:存储选型白皮书与万卡集群实战解析
一、引言 在人工智能技术持续高速发展的当下,AI 训练任务对存储系统的依赖愈发关键,而存储系统的选型也变得更为复杂。不同的 AI 训练场景,如机器学习与大模型训练,在模型特性、GPU 使用数量以及数据量带宽等方面的差异ÿ…...

谢志辉和他的《韵之队诗集》:探寻生活与梦想交织的诗意世界
大家好,我是谢志辉,一个扎根在文字世界,默默耕耘的写作者。写作于我而言,早已不是简单的爱好,而是生命中不可或缺的一部分。无数个寂静的夜晚,当世界陷入沉睡,我独自坐在书桌前,伴着…...
UE5 Simulation Stage
首先将Grid2D创建出来,然后设置值,Grid2D类似于在Niagara系统中的RenderTarget2D,可以进行绘制,那么设置大小为512 * 512 开启Niagara粒子中的Simulation Stage 然后开始编写我们的自定义模块 模块很简单,TS就是Textur…...

Swift 解 LeetCode 250:搞懂同值子树,用递归写出权限系统检查器
文章目录 前言问题描述简单说:痛点分析:到底难在哪?1. 子树的概念搞不清楚2. 要不要“递归”?递归从哪开始?3. 怎么“边遍历边判断”?这套路不熟 后序遍历 全局计数器遍历过程解释一下:和实际场…...

怎样使用Python编写的Telegram聊天机器人
怎样使用Python编写的Telegram聊天机器人 代码直接运行可用 以下是对这段代码的详细解释: 1. 导入必要的库 import loggingfrom telegram import Update from telegram.ext import ApplicationBuilder, ContextTypes, CommandHandler, filters, MessageHandler import log…...

Elixir语言的移动应用安全
Elixir语言的移动应用安全解析 引言 在当今的数字化时代,移动应用已经成为我们日常生活中不可或缺的一部分。从购物、社交到在线银行,几乎每一个生活领域都与移动应用紧密相连。然而,随着应用的普及,安全问题也随之而来。如何确…...

动态估算gas和gasPrice
目录 一、什么是动态估算? 二、动态估算 Gas(代码示例) ✅ 使用 Ethers.js 估算 gasLimit: 💡 发送交易时加一点 buffer: 三、动态估算 gasPrice / maxFee ✅ 获取当前 baseFee(用 provider): ✅ 搭配交易一起发送: 四、完整组合:动态估算 Gas + EIP-1559 费用…...

数据清洗
map阶段:按行读入内容,对内容进行检查,如果字段的个数少于等于11,就删除这条日志(不保留)去除日志中字段个数小于等于11的日志内容。 <偏移量,第一行的内容> → <通过刷选之后的第一行…...
增益调度控制 —— 理论、案例与交互式 GUI 实现
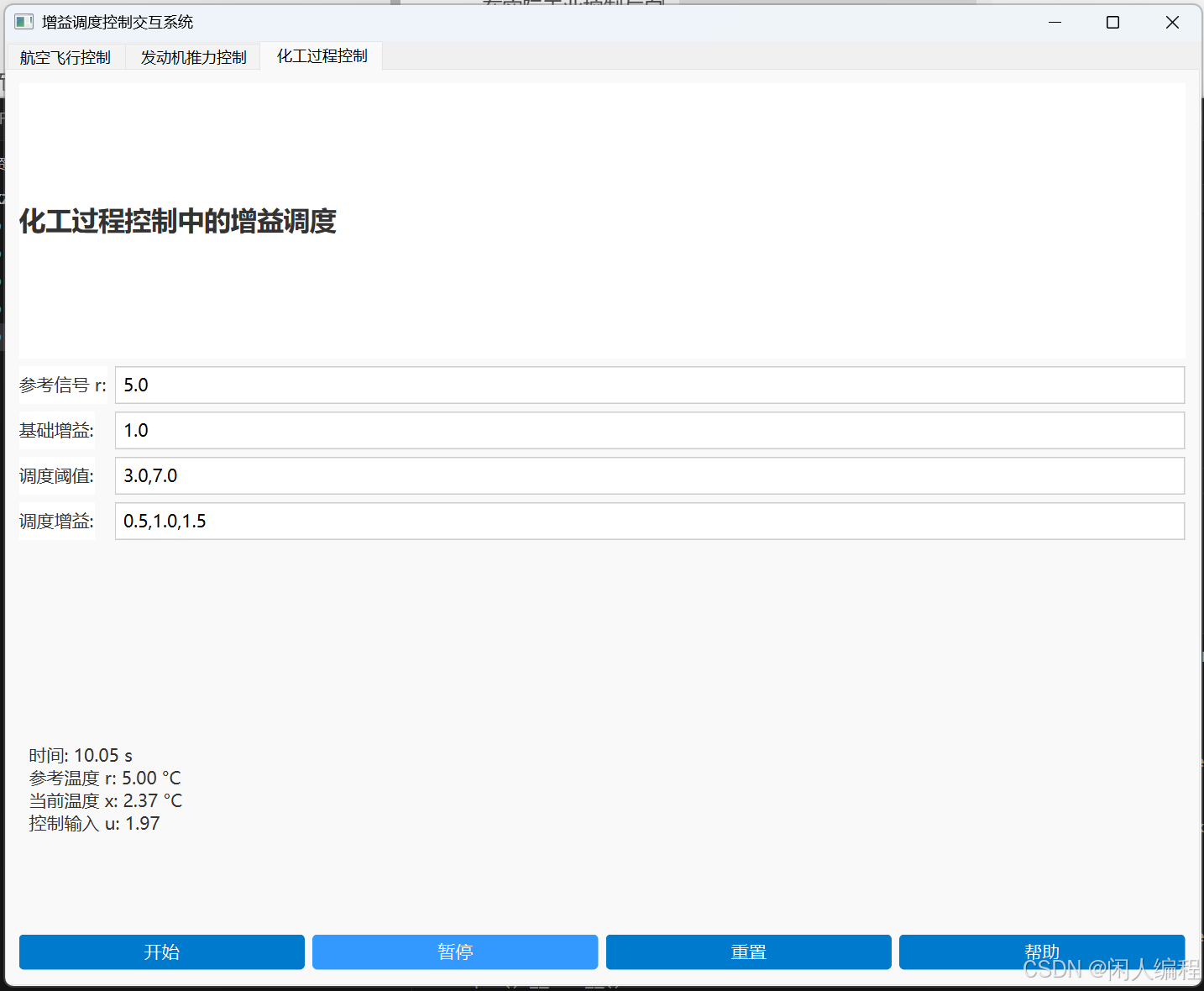
目录 增益调度控制 —— 理论、案例与交互式 GUI 实现一、引言二、增益调度控制的基本原理三、数学模型与公式推导四、增益调度控制的优势与局限4.1 优势4.2 局限五、典型案例分析5.1 案例一:航空飞行控制中的增益调度5.2 案例二:发动机推力控制中的增益调度5.3 案例三:化工…...
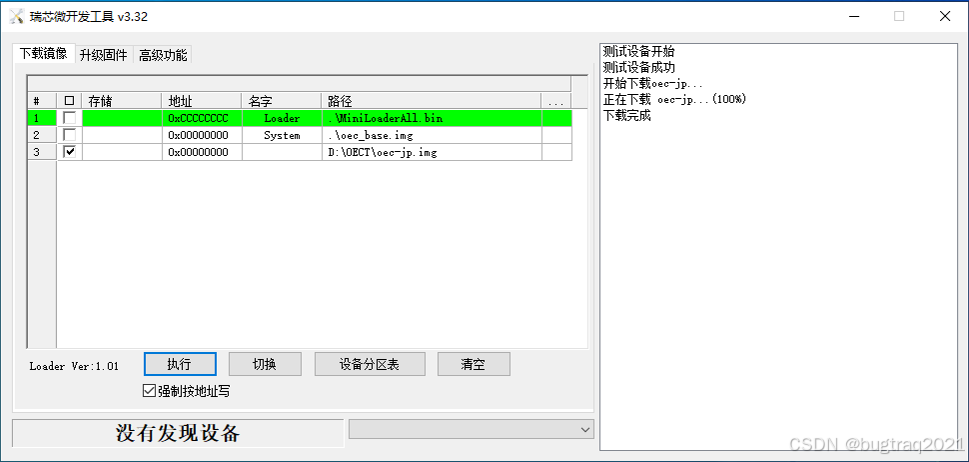
关于OEC/OEC-turbo刷机问题的一些解决方法(2)——可能是终极解决方法了
前面写了两篇关于OEC/OEC-turbo刷机问题的文章了,从刷机过程、刷机中遇到的问题,以及遇到最多但始终无法有效解决的下载boot失败的问题的剖析,最近确实也做了一些工作,虽然没有最终解决,但也算是这系列文章里面阶段性的…...

前后端接口参数详解与 Mock 配置指南【大模型总结】
前后端接口参数详解与 Mock 配置指南 一、前端请求参数类型及 Mock 处理 1.1 URL 路径参数 (Path Parameters) 场景示例: GET /api/users/{userId}/orders/{orderId}Mock.js 处理: Mock.mock(/\/api\/users\/(\d)\/orders\/(\d)/, get, (options) &g…...