MPDrive:利用基于标记的提示学习提高自动驾驶的空间理解能力
25年4月来自南方科技大学、百度、英国 KCL和琶洲实验室(广东 AI 和数字经济实验室)的论文“MPDrive: Improving Spatial Understanding with Marker-Based Prompt Learning for Autonomous Driving”。
自动驾驶视觉问答(AD-VQA)旨在根据给定的驾驶场景图像回答与感知、预测和规划相关的问题,这在很大程度上依赖于模型的空间理解能力。先前的工作通常通过坐标的文本表示来表达空间信息,导致视觉坐标表示和文本描述之间存在语义差距。这种疏忽妨碍了空间信息的准确传递并增加了表达负担。为了解决这个问题,提出了一种基于标记(marker)的提示学习框架(MPDrive),它通过简洁的视觉标记表示空间坐标,确保语言表达的一致性并提高AD-VQA中视觉感知和空间表达的准确性。具体而言,通过聘请检测专家将物体区域与数字标签叠加来创建标记(marker)图像,将复杂的文本坐标生成转换为简单的基于文本视觉标记(marker)预测。此外,将原始图像和标记(marker)图像融合为场景级特征,并将它们与检测先验相结合以得出实例级特征。通过结合这些特征,构建双粒度视觉提示,以刺激 LLM 的空间感知能力。
自动驾驶技术发展迅速,显示出提高道路安全性、交通效率和减少人为错误的潜力 [25、45、47、52]。强大的自动驾驶系统需要能够感知复杂环境并做出明智决策的智体。最近,多模态大语言模型 (MLLM) 已成为一种有前途的自动驾驶方法,在视觉问答 (AD-VQA) 任务中展示了强大的泛化能力 [4、7、18、29、37、40、48、49、61]。
当前的 MLLM 在自动驾驶场景的空间理解方面面临挑战 [24、41、62],限制了它们在驾驶场景中准确定位、识别和描述物体及其状态的能力。虽然一些 AD-VQA 方法 [19、24、30、34、39] 试图通过对特定领域数据集进行指令调整来提高 MLLM 性能,但它们还没有充分解决空间推理优化的核心挑战。在这些方法中,一些方法 [34、41] 通过整合检测先验来增强空间理解。然而,这些方法通常以文本格式表达空间坐标,导致基于坐标的描述和语言描述之间不一致 [5、33、53],这破坏了自动驾驶中的感知准确性和精确的空间表达。
本文专注于增强自动驾驶中坐标表示和空间理解的一致性,提出基于标记(marker)的提示学习 (MPDrive),这是一种多模态框架,它使用文本索引来注释每个交通元素并直接预测相应索引的坐标。
如图所示:主流MLLM方法和 MPDrive 的比较

给定一组 m 个视图图像 {I_1,I_2,…,I_m} 和一个文本问题 Q,AD-VQA 旨在生成一个响应序列 Sˆ = (sˆ_1, sˆ_2, . . . , sˆ_N ),其中 sˆ_i 表示长度为 N 的序列中的第 i 个 token。AD-VQA 中 MLLM 的工作流程如下:1)从每个视图 I_i 中提取视觉特征的一个视觉编码器;2)将多视图特征转换为图像 token 的一个连接 MLP;3)将问题 Q 转换为文本 token 的文本 token 化器;4)融合图像 token 和文本 token 以生成响应序列 Sˆ 的 LLM。
基于这些 MLLM,提出 MPDrive 来增强空间理解能力。为清楚起见,使用单视图场景说明该方法,同时所有操作自然扩展到多视图情况。
视觉 tokens
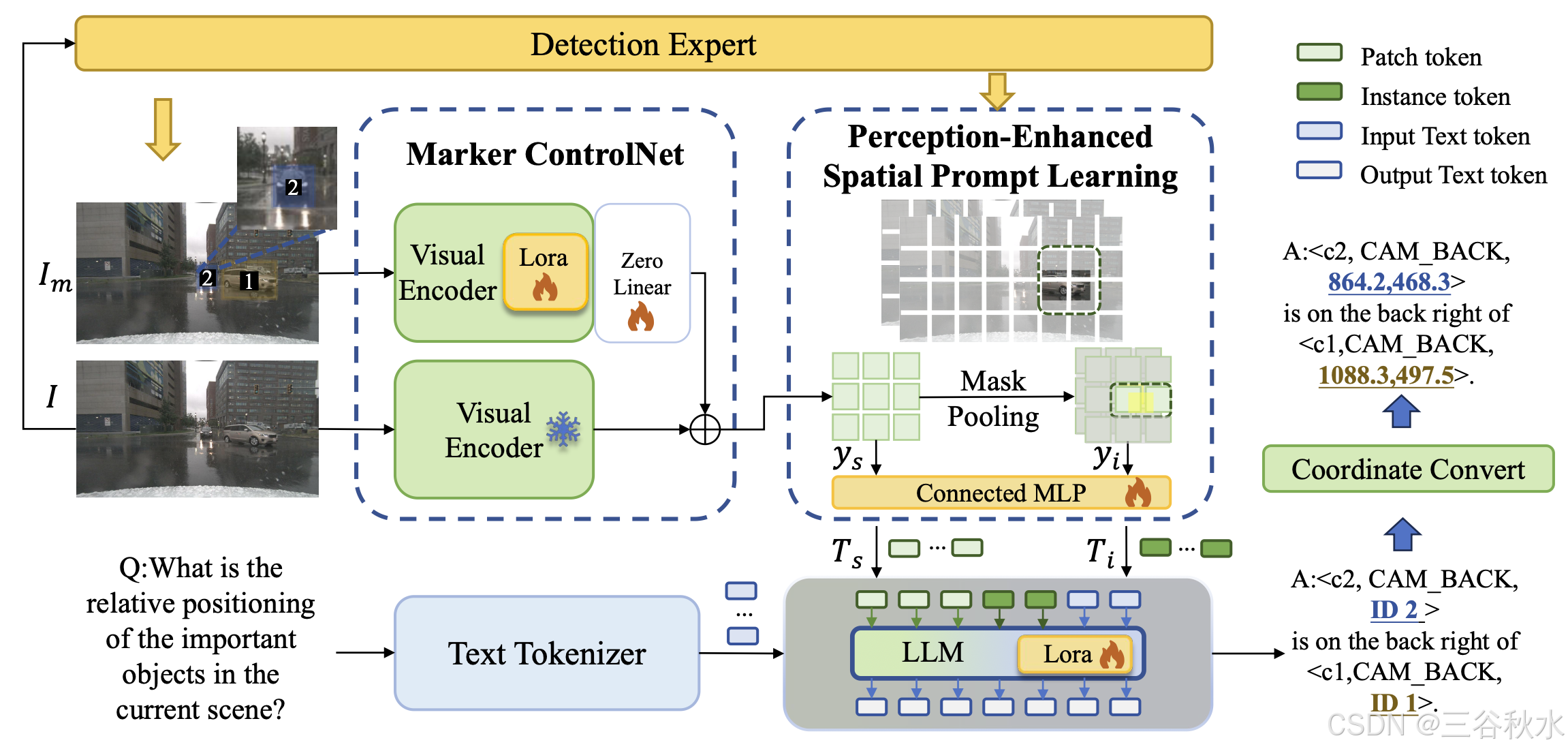
为了弥合空间坐标表示和语言描述之间的差距,引入了视觉 tokens。这种方法通过将空间坐标生成任务转换为直接的基于文本视觉 token 预测,简化空间坐标生成任务。如图所示,给定输入图像 I,使用检测专家 StreamPETR [43] 来识别交通目标(例如,汽车、卡车和公共汽车),遵循 [43] 中指定的目标类别。检测专家生成 K 个目标掩码,表示为二进制掩码 R = [r_1, r_2, . . . , r_K ],其中 r_k ∈ {0, 1} 表示第 k 个检测掩码。对于 r_k,计算其平均质心坐标 c_k = (x_k, y_k),它表示该目标的中心位置。带注释的标记(marker)图像 I_m 是通过修改原始图像 I 生成的,修改步骤分为两个步骤:首先,在每个物体的质心 c_k =(x_k, y_k) 处注释标记(marker)索引 k;其次,叠加相应的半透明掩码区域 r_k 来描述物体边界。此外,当问题 Q 中引用新的空间坐标 c_new(距离现有坐标超过 d 个像素)时,为其分配一个标记(marker)索引 K +1,并在 I_m 上注释该索引,以保持跨视觉和文本模态的空间推理一致性。
对于响应生成,利用视觉标记(Visual Marker)来提高视觉提示的有效性,并确保语言输出的一致性。具体而言,LLM 首先根据给定的图像和问题生成指示符 k,然后将该索引 k 映射到其对应的质心坐标 c_k = (x_k, y_k) 以进行精确定位。此过程允许 MPDrive 通过标记(marker)识别关键物体,而复杂的空间感知则由检测专家处理。通过避免直接坐标输出,这种方法减轻 LLM 的语言复杂性,确保文本输出的一致性。
MPDrive 架构
如上图所示,MPDrive 由两个关键组件组成:MCNet 和 PSPL。MCNet 利用原始图像和附加的视觉标记(marker)图像增强空间表征,以实现双层融合场景特征。基于这些提取的特征和检测专家,PSPL 生成场景级和实例级视觉提示,从而增强对驾驶场景信息和物体信息的理解。这些组件的集成显著提升了 MPDrive 的空间感知能力。
Marker ControlNet。为了有效保留原始图像的关键特征并充分利用视觉标记(visual marker)中的丰富信息,提出标记控制网络 (MCNet)。该模块将原始图像和视觉标记图像作为输入,并生成场景级特征。
冻结原始视觉编码器 E 的参数 θ,并创建一个具有参数 θ_c 的可训练编码器副本,记为 E_c。在训练过程中,原始视觉编码器保持冻结状态,专注于使用低秩自适应 (LoRA) [16] 在多头注意模块和秩为 16 的前馈网络上训练新的控制块。用零线性层 Z 连接原始视觉编码器和控制块,其中权重和偏差都初始化为零,参数为 θ_z 。这些层与控制块一起训练,可以有效地调整参数并提高性能。使用原始视觉编码器 E 提取原始图像特征,而使用新控制块 E_c 与 Z 结合提取视觉标记图像特征。这些特征通过元素相加组合在一起,实现场景级特征融合:
y_s = E(I; θ) + Z(E_c(I_m; θ_c); θ_z),
其中 y_s 表示场景级特征。
由于零线性层的权重和偏差参数初始化为零,上述公式中的 Z 项从零开始,从而保留原始图像特征的完整性。在后续优化阶段,将通过反向传播逐渐引入来自视觉标记图像的有益特征。
MCNet 有效地结合了视觉标记(marker),使 MPDrive 能够在保留原始图像关键特征的同时,通过视觉标记的引导学习额外的语义信息。更重要的是,这种方法确保 MPDrive 能够捕获视觉标记信息,然后输出相应的基于文本的标记(marker),从而在生成空间信息时保持语言输出的一致性。
感知增强的空间提示学习。为了解决 MLLM 在空间表达能力方面的局限性,引入感知增强的空间提示学习 (PSPL),旨在通过利用场景级和实例级视觉提示来增强 MPDrive 的空间感知。
图像中的视觉标记准确地表示整个场景的空间信息。因此,MCNet 的输出特征 y_s 包含丰富的场景级空间信息。随后,通过连接的 MLP 处理 y_s 以生成场景级视觉提示 T_s。这些场景级的视觉提示显著提高了复杂场景中对空间信息的感知和准确理解。
为了进一步增强实例级空间信息的表示,引入实例级视觉提示。给定第k个检测目标及其区域掩码 r_k,场景级视觉提示 y_s,C 是通道数,W′ 是宽度,H′ 是高度,将二元区域掩码 r_k 调整为与 y_s 相同的大小,并使用掩码平均池化。
给定K个目标,获得一组实例级视觉特征{y_i1,…,y_iK}。这些特征通过连接的 MLP 处理以生成实例级视觉提示T_i。这个实例级视觉提示丰富了目标的空间表示。 PSPL 将场景级视觉提示 T_s 和实例级视觉提示 T_i 连接在一起,增强 MPDrive 的空间感知能力。
大语言模型。LLM 从文本 token 化器接收输入文本 token,从 PSPL 模块接收空间提示 Ts 和 Ti。它使用其内部模型处理这些输入,其中 LoRA 应用于多头注意模块和秩为 16 的前馈网络,生成 N 个单词的输出序列 Sˆ = (sˆ_1,sˆ_2,…,sˆ_N)。然后使用输出 token 序列 Sˆ 与真值序列 S = (s_1, s_2, …, s_N) 计算交叉熵损失。
数据集。在 DriveLM [39] 和 CODA-LM [24] 数据集上进行实验。对于 DriveLM 数据集,遵循 EM-VLM4AD [14] 和 MiniDrive [58] 采用的数据分区策略,将数据集划分为训练和验证子集,分别分配 70% 和 30% 的数据。训练集包含 341,353 个唯一的 QA 对,而验证集包含 18,817 个不同的 QA 对。每个 QA 对由六个视图图像组成:正面视图、左正面视图、右正面视图、后视图、左后视图和右后视图。对于 CODA-LM 数据集,使用 20,495 个 QA 对训练集训练 MPDrive,并使用 193 个 QA 对 mini-set 对其进行验证。每个 QA 对,都由正面图像组成。
在训练阶段,采用初始速率为 5e − 4 的余弦学习调度,并使用权重衰减为 0.01 的 AdamW [28] 优化器。对于 DriveLM 数据集,使用的批量大小为 128,并在八个 A800 GPU 上进行 3,000 次迭代训练,相当于约 1 个 epoch。对于 CODA-LM 数据集,进行 2000 次迭代训练,相当于约 12 个 epoch。在整个训练过程中,视觉编码器权重保持不变。对连接的 MLP 和零 MLP 进行微调,同时将低秩自适应(LoRA)[16] 应用于 MCNet 中的视觉都将输入图像分辨率调整为 448×448 像素。检测专家针对每幅图像动态确定检测到的物体数量 K,所有摄像机视图中的最大物体数量限制为 100 个。我们设置新的空间坐标 dth = 50。
相关文章:
MPDrive:利用基于标记的提示学习提高自动驾驶的空间理解能力
25年4月来自南方科技大学、百度、英国 KCL和琶洲实验室(广东 AI 和数字经济实验室)的论文“MPDrive: Improving Spatial Understanding with Marker-Based Prompt Learning for Autonomous Driving”。 自动驾驶视觉问答(AD-VQA)…...

QTSql全解析:从连接到查询的数据库集成指南
概览 与数据库的有效集成是确保数据管理效率和应用性能的关键,Qt框架就提供了强大的QtSql模块,使得开发者能够轻松地进行数据库操作,包括连接、查询执行以及结果处理等 一、引入QtSql模块 首先,需要在项目中引入QtSql模块&…...

FreeRTOS临界区
在FreeRTOS中,临界区通过关闭可管理的中断来保护共享资源,具体关闭的中断层级由configMAX_SYSCALL_INTERRUPT_PRIORITY宏定义决定。以下是关键点解析: 中断优先级分类: 高优先级中断:数值低于configMAX_SYSCALL_INTERR…...
【学习笔记】HTTP和HTTPS的核心区别及工作原理
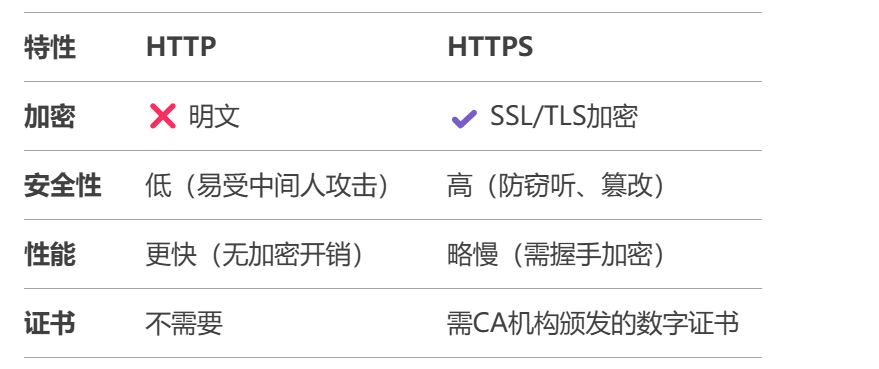
一、基础概念 HTTP(超文本传输协议):明文传输数据,默认端口80,容易被窃听或篡改。 HTTPS(HTTP SSL/TLS):通过加密传输数据,默认端口443,保障安全性。 二、…...

Dubbo的简单介绍
Dubbo的简单介绍 Dubbo 是一个高性能的 Java RPC 框架,最初由阿里巴巴开发,用于构建分布式服务。它主要用于提供服务间的通信,支持高效的远程调用和服务治理,常用于大规模分布式系统中。Dubbo 提供了以下几个核心功能:…...
)
7.2 重复推送(每日、每周等)
1. 核心方法 使用 UNCalendarNotificationTrigger 的 dateMatching 参数配置日历组件(DateComponents),结合 repeats: true 实现周期性触发。 2. 不同频率的重复推送配置 2.1 每日重复 每天固定时间触发(如上午 10:00ÿ…...
【STL】list介绍(附与vector的比较)
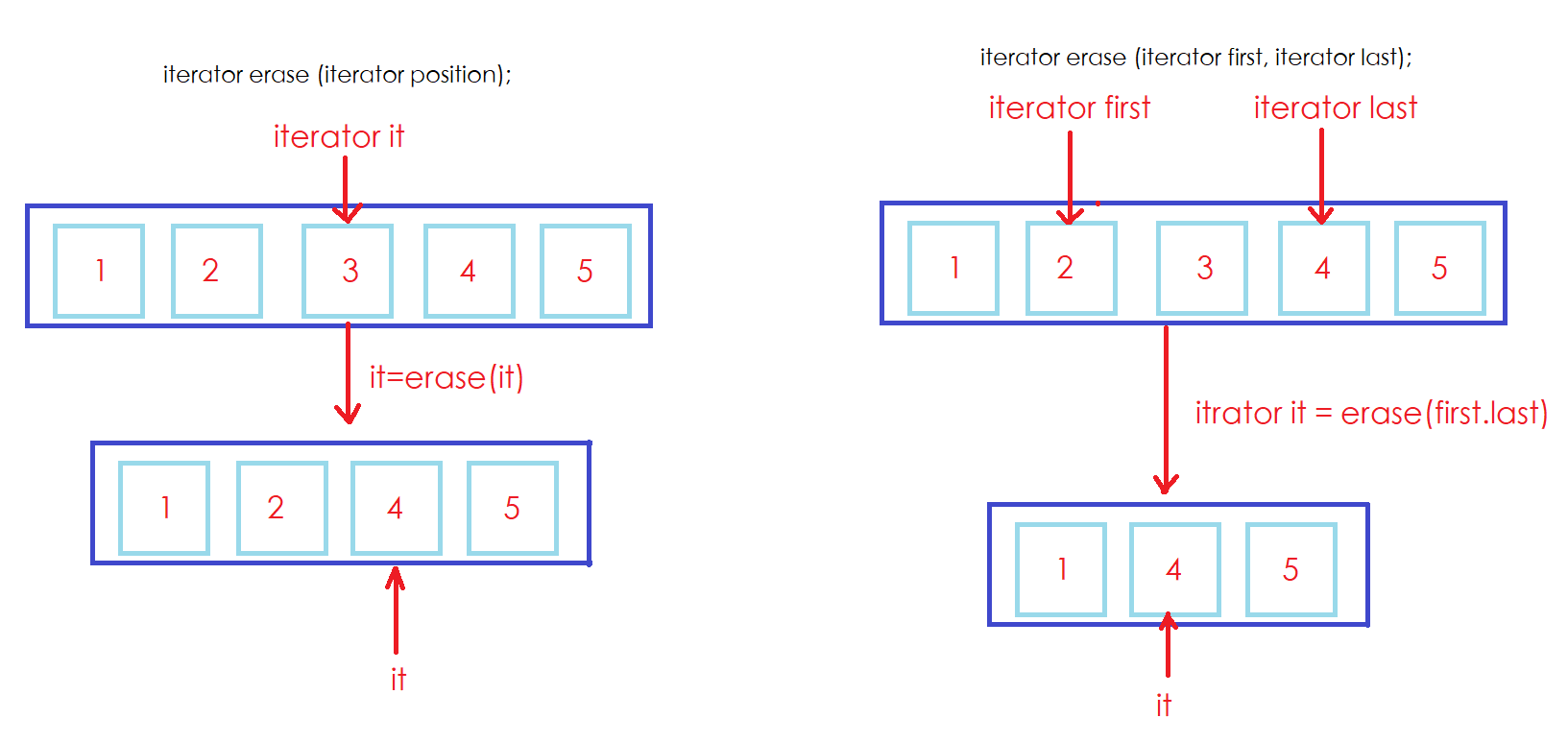
文章目录 1.关于list2.使用2.1 list的构造2.2 list 迭代器的使用2.3 list 容量操作2.3.1 size()2.3.2 empty()2.3.3 resize() 2.4 list 元素访问2.4.1 front()2.4.2 back() 2.5 list 修改操作2.5.1 push_front()2.5.2 pop_front()2.5.3 push_back()2.5.4 pop_back()2.5.5 inser…...

Ansible:roles角色
文章目录 Roles角色Ansible Roles目录编排Roles各目录作用创建 roleplaybook调用角色调用角色方法1:调用角色方法2:调用角色方法3: roles 中 tags 使用实战案例 Roles角色 角色是ansible自1.2版本引入的新特性,用于层次性、结构化…...

找不到导入的项目“xxx\QtMsBuild\Qt.props”。请确认 Import 声明“$(QtMsBuild)\Qt.props”中计算结果为
系列文章目录 文章目录 系列文章目录前言一、问题原因 前言 新建的项目visual studio2022 使用Qt vs tools 找不到导入的项目“E:\osgEarth\DigitalSimulationPlatform\DigitalSimulationPlatform\QtMsBuild\Qt.props”。 请确认 Import 声明“$(QtMsBuild)\Qt.props”中计算结…...

Rust 是如何层层防错的
一、Rust 的多层防错机制 🧱 第一层:Rust语言自带的“编译时护盾” —— 错误连运行都跑不起来 错误类型Rust 怎么发现的?工具/机制举个例子✅ 语法缺陷写错了代码格式或语法Rust Analyzer(智能补全)少写了分号、括号…...

SQL Server 数据库邮件配置失败:SMTP 连接与权限问题
问题现象: 配置数据库邮件时,发送测试邮件失败,提示 “邮件无法发送到 SMTP 服务器,操作超时”(错误 14661)或 “服务器拒绝发件人地址”(错误 15009)。 快速诊断 检查数据库邮件配置…...

2025 年福建交安安全员考试:结合本省交通特点备考
福建地处东南沿海,交通建设具有独特特点,这对交安安全员考试备考意义重大。在桥梁建设方面,由于面临复杂的海洋环境,桥梁的防腐、防台风等安全措施成为重点。考生在学习桥梁施工安全知识时,要特别关注福建本地跨海大桥…...

OpenBMC:BmcWeb 处理http请求5 检查权限
OpenBMC:BmcWeb 处理http请求4 处理路由对象-CSDN博客 在通过url获取了路由对象后,如果该请求是有session的,那么下一步需要检查权限 1.validatePrivilege调用时传入了一个lambda(1)做为回调 validatePrivilege(req, asyncResp, rule,[req, asyncResp, &rule, params =…...
)
996引擎-源码学习:Cocos2d-Lua 的 class(classname, ...)
996引擎-源码学习:Cocos2d-Lua 的 class(classname, ...) 一、核心方法调用顺序用户调用入口完整调用链二、__create 工厂方法的三种情形情形1:父类为函数(自定义工厂)情形2:父类为Cocos原生类情形3:父类为普通Lua表三、方法职责与内存管理对照表四、正确使用示例示例1…...

UE5 蓝图里的声音
文章目录 支持的格式设置循环播放在场景中放置音频设置音频的衰减与不衰减在UI动画中播放声音使用蓝图节点播放声音按钮本身就可以播放声音 支持的格式 支持:WAV 不支持:MP3 设置循环播放 双击音频,打开音频设置,勾选Looping …...

「合诚」携手企企通共建新材料和健康产业采购数智化新生态
在科技革命与产业变革深度融合的时代背景下,新材料与健康产业正迎来数字化、智能化的快速发展。 技术突破与消费升级的双重驱动,推动着行业不断创新,同时也对企业的供应链管理提出了更高要求。 1、合诚:聚焦新材料与健康产业&am…...

Three.js 系列专题 7:性能优化与最佳实践
内容概述 随着 3D 场景复杂度的增加,性能优化变得至关重要。Three.js 项目可能因几何体数量、纹理大小或渲染设置而变慢。本专题将介绍减少 draw call、优化纹理和使用调试工具的最佳实践。 学习目标 学会减少 draw call 和几何体复杂度。掌握纹理压缩与内存管理。使用 Stat…...
java+postgresql+swagger-多表关联insert操作(七)
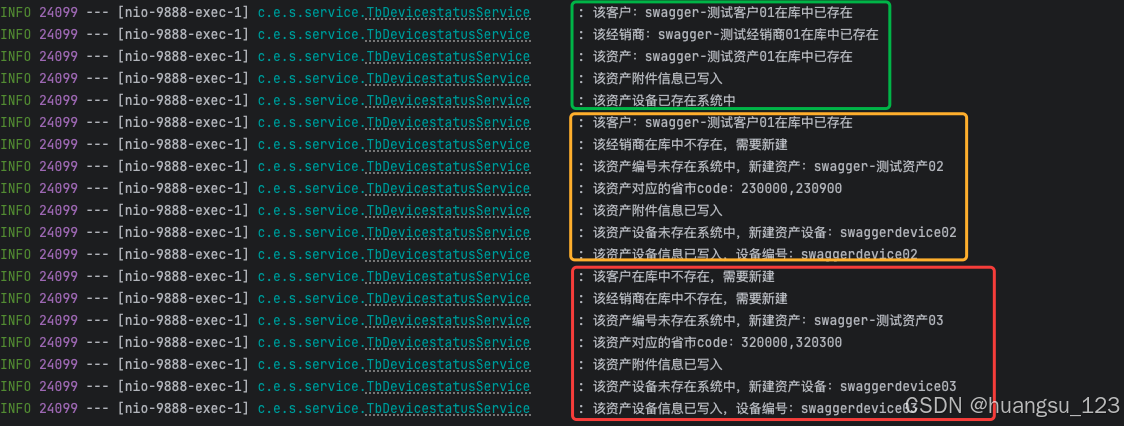
入参为json,然后根据需要对多张表进行操作: 入参格式: [{"custstoreName":"swagger-测试经销商01","customerName":"swagger-测试客户01","propertyNo":"swaggertest01",&quo…...

Git版本管理系列:(一)使用Git管理单分支
目录 基础概念介绍仓库的创建创建隐藏目录添加代码到暂存区提交代码到仓库提交记录查询比较差异标签文件删除版本回退总结 Git 是一个分布式版本控制系统(DVCS),用于跟踪文件的变更并协调多人协作开发,由 Linus Torvalds 于 2…...

mapbox基础,加载ESRI OpenStreetMap开放街景标准风格矢量图
👨⚕️ 主页: gis分享者 👨⚕️ 感谢各位大佬 点赞👍 收藏⭐ 留言📝 加关注✅! 👨⚕️ 收录于专栏:mapbox 从入门到精通 文章目录 一、🍀前言1.1 ☘️mapboxgl.Map 地图对象1.1 ☘️mapboxgl.Map style属性二、🍀加载ESRI OpenStreetMap开放街景标准风…...

WGAN-GP 原理及实现(pytorch版)
WGAN-GP 原理及实现 一、WGAN-GP 原理1.1 WGAN-GP 核心原理1.2 WGAN-GP 实现步骤1.3 总结 二、WGAN-GP 实现2.1 导包2.2 数据加载和处理2.3 构建生成器2.4 构建判别器2.5 训练和保存模型2.6 图片转GIF 一、WGAN-GP 原理 Wasserstein GAN with Gradient Penalty (WGAN-GP) 是对…...
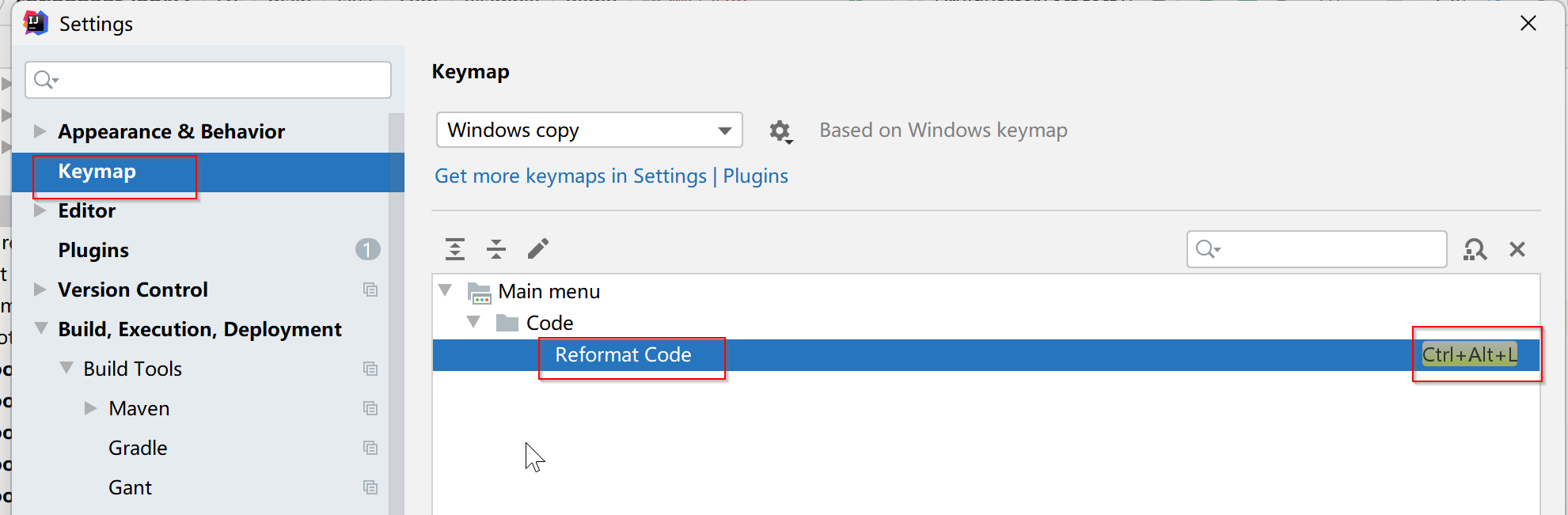
IntelliJ IDEA使用技巧(json字符串格式化)
文章目录 一、IDEA自动格式化json字符串二、配置/查找格式化快捷键 本文主要讲述idea中怎么将json字符串转换为JSON格式的内容并且有层级结构。 效果: 转换前: 转换后: 一、IDEA自动格式化json字符串 步骤一:首先创建一个临…...

synchronized锁升级详解
synchronized锁升级详解 synchronized是Java中实现线程同步的关键字,它在JVM内部实现了锁的升级机制,从偏向锁到轻量级锁再到重量级锁,这种优化是为了减少锁操作带来的性能开销。 1. 锁的四种状态 Java对象头中的Mark Word会记录锁的状态&…...

MCP基础学习一:MCP概述与基础
MCP概述与基础 什么是MCP? MCP(Model Context Protocol,模型上下文协议)是由Anthropic公司于2024年11月推出的一种开放协议,旨在实现大型语言模型(LLM)与外部数据源和工具的无缝集成。MCP通过…...
SvelteKit 最新中文文档教程(18)—— 浅层路由和 Packaging
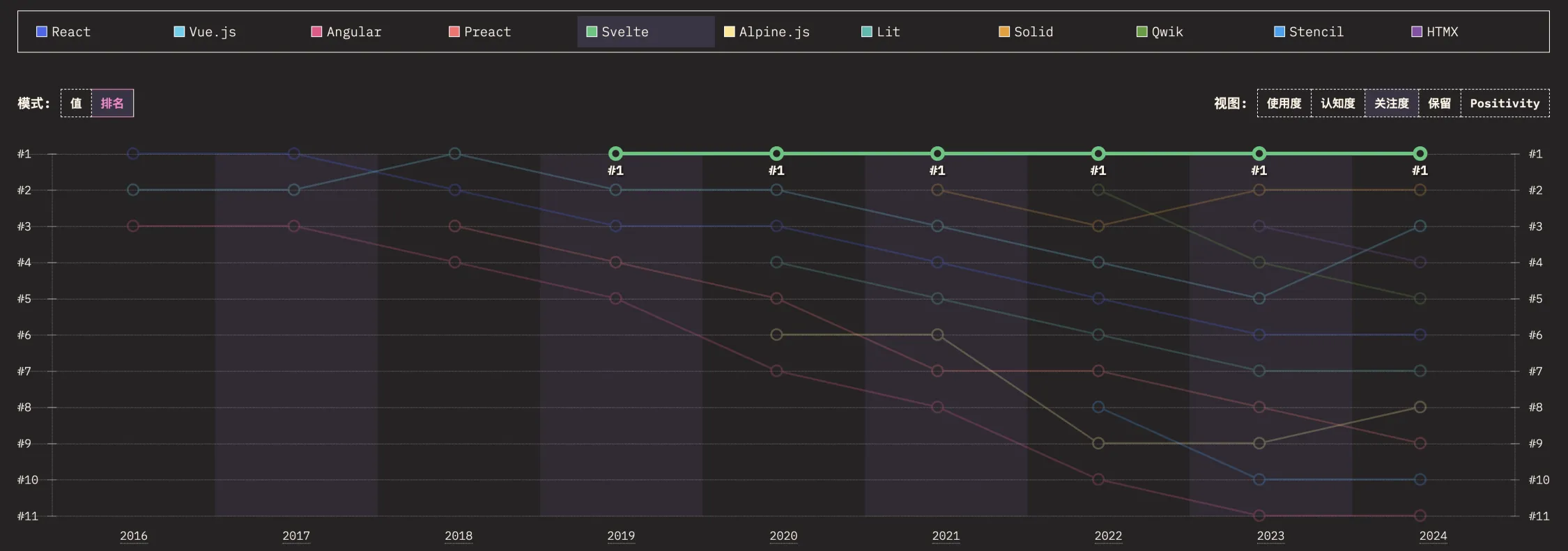
前言 Svelte,一个语法简洁、入门容易,面向未来的前端框架。 从 Svelte 诞生之初,就备受开发者的喜爱,根据统计,从 2019 年到 2024 年,连续 6 年一直是开发者最感兴趣的前端框架 No.1: Svelte …...

集成nacos2.2.1出现的错误汇总
总结 1.jdk问题 jdk要一致 2.idea使用问题 idea启动nacos要配置,idea启动类要启动两次,并配置两次vm参数 3.项目依赖问题 依赖要正确添加,有的模块就是不能用公共模块的pom配置,需要独立配置,先后启动顺序也要注意…...

DFS 蓝桥杯
最大数字 问题描述 给定一个正整数 NN 。你可以对 NN 的任意一位数字执行任意次以下 2 种操 作: 将该位数字加 1 。如果该位数字已经是 9 , 加 1 之后变成 0 。 将该位数字减 1 。如果该位数字已经是 0 , 减 1 之后变成 9 。 你现在总共可以执行 1 号操作不超过 A…...
LabVIEW 开发如何降本增效
在 LabVIEW 开发领域,如何在确保项目质量的同时降低开发成本,是众多企业和开发者共同关注的焦点。这不仅关乎资源的高效利用,更影响项目的投资回报率和市场竞争力。下面,我们将从多个维度深入剖析降本策略,并结合具体案…...

Tomcat 负载均衡
目录 二、Tomcat Web Server 2.1 Tomcat 部署 2.1.1 Tomcat 介绍 2.1.2 Tomcat 安装 2.2 Tomcat 服务管理 2.2.1 Tomcat 启停 2.2.2 目录说明 2.2.3编辑主页 2.3 Tomcat管理控制台 2.3.1开启远程管理 2.3.2 配置远程管理密码 三、负载均衡 3.1 重新编译Nginx 3.1.1 确…...
)
【AI学习】AI Agent(人工智能体)
1,AI agent 1)定义 是一种能够感知环境、基于所感知到的信息进行推理和决策,并通过执行相应动作来影响环境、进而实现特定目标的智能实体。 它整合了多种人工智能技术,具备自主学习、自主行动以及与外界交互的能力,旨…...