机器人零位标定修正流程介绍
如果想看运动学标定可以看看 机器人运动学参数标定, 一次性把运动学参数和零位标定等一起标定求解.
1. 零位标定
零位标定是机器人运动学标定中的一个重要步骤,其目的是校正机器人关节的初始位置误差。以下是需要进行零位标定的主要原因:
-
制造误差
- 在机器人制造过程中,关节传感器(如编码器)和机械零件的安装可能存在微小的偏差。
- 这些偏差会导致关节的零位(初始位置)与理论值不一致,从而影响运动学计算的准确性。
-
装配误差
- 机器人在组装过程中,关节和连杆之间的对齐可能存在误差。
- 这些误差会导致正运动学和逆运动学计算的结果与实际位置不符。
-
传感器误差
- 编码器或其他位置传感器可能存在零点漂移或校准误差。
- 零位标定可以校正这些传感器的初始偏差。
-
提高运动精度
- 零位偏差会累积到机器人运动的末端位置,导致末端执行器无法准确到达目标位置。
- 通过零位标定,可以显著提高机器人末端的定位精度。
-
确保一致性
- 在多次启动或不同环境下,零位可能会发生轻微变化。
- 零位标定可以确保机器人在不同时间和环境下的运动一致性。
-
运动学模型的准确性
- 机器人控制依赖于精确的运动学模型(正运动学和逆运动学)。
- 零位标定是运动学模型校正的重要部分,确保理论模型与实际机器人一致。
-
避免累积误差
- 零位偏差会导致关节角度的计算误差,这些误差在多关节运动中会累积,影响整体运动精度。
- 零位标定可以有效减少这种累积误差。
2. 零位标定思路
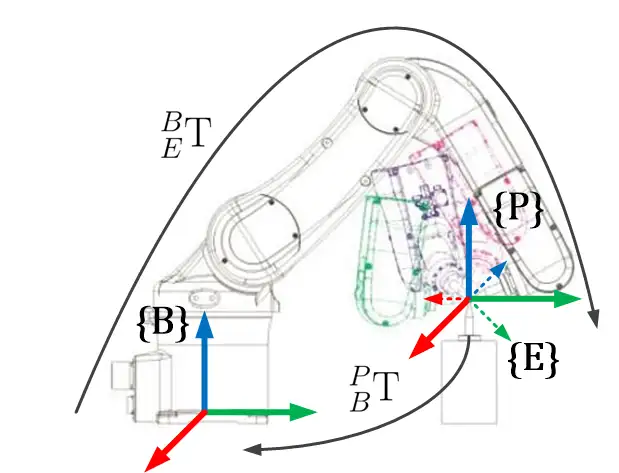
假设有一个针尖基准点,令机器人末端对准针尖基准点,则实际末端位置可以表示为:
p → r e a l = p → f k + J ⋅ ϕ → \overrightarrow{p}^{real} = \overrightarrow{p}^{fk} + J \cdot \overrightarrow{\phi} preal=pfk+J⋅ϕ
其中:
- p → r e a l \overrightarrow{p}^{real} preal 是实际末端位置。
- p → f k \overrightarrow{p}^{fk} pfk 是通过正运动学计算得到的理论末端位置。
- J J J 是雅可比矩阵,表示关节角度对末端位置的偏导数。
- ϕ → \overrightarrow{\phi} ϕ 是零位偏差向量。
通过改变机器人姿态,记录两组不同的末端位置和关节角度,得到以下关系:
p → 1 f k + J 1 ⋅ ϕ → = p → 2 f k + J 2 ⋅ ϕ → \overrightarrow{p}^{fk}_1 + J_1 \cdot \overrightarrow{\phi} = \overrightarrow{p}^{fk}_2 + J_2 \cdot \overrightarrow{\phi} p1fk+J1⋅ϕ=p2fk+J2⋅ϕ
目标是求解零位偏差 ϕ → \overrightarrow{\phi} ϕ,使上述等式成立。
3. 零位偏差计算方法及算法流程
3.1 数据采集
- 选取多个测量点(例如 n n n 个)。
- 记录每个测量点的关节角度和实际末端位置。

3.2 误差模型
对于每个测量点,误差可以表示为:
Δ p → i = p → i r e a l − p → i f k = J i ⋅ ϕ → \Delta \overrightarrow{p}_i = \overrightarrow{p}^{real}_i - \overrightarrow{p}^{fk}_i = J_i \cdot \overrightarrow{\phi} Δpi=pireal−pifk=Ji⋅ϕ
将所有测量点的误差组合成矩阵形式:
Y = B ⋅ ϕ → Y = B \cdot \overrightarrow{\phi} Y=B⋅ϕ
其中:
- Y Y Y 是误差向量, Y = [ Δ p → 1 , Δ p → 2 , … , Δ p → n ] T Y = [\Delta \overrightarrow{p}_1, \Delta \overrightarrow{p}_2, \dots, \Delta \overrightarrow{p}_n]^T Y=[Δp1,Δp2,…,Δpn]T。
- B B B 是雅可比矩阵的组合, B = [ J 1 , J 2 , … , J n ] T B = [J_1, J_2, \dots, J_n]^T B=[J1,J2,…,Jn]T。
3.3 最小二乘法求解
通过最小化误差的平方和,求解零位偏差 ϕ → \overrightarrow{\phi} ϕ:
ϕ → = ( B T ⋅ B ) − 1 ⋅ B T ⋅ Y \overrightarrow{\phi} = (B^T \cdot B)^{-1} \cdot B^T \cdot Y ϕ=(BT⋅B)−1⋅BT⋅Y
4. Python 实现代码
以下是一个简单的 Python 实现:
import numpy as np
np.set_printoptions(5, suppress=True)# 示例数据:雅可比矩阵 B 和误差向量 Y
B = np.array([[1, 2], [3, 4], [5, 6]]) # 雅可比矩阵 (3x2)
Y = np.array([1, 2, 3]) # 误差向量 (3x1)# 计算零位偏差 φ
BT = B.T # B 的转置
phi = np.linalg.inv(BT @ B) @ BT @ Y # 最小二乘法公式print("零位偏差 φ:", phi)
零位偏差 φ: [0. 0.5]
5. 注意事项
- 矩阵维度匹配:确保矩阵 B B B 的行数与误差向量 Y Y Y 的长度一致。
- 矩阵可逆性:矩阵 ( B T ⋅ B ) (B^T \cdot B) (BT⋅B) 必须是可逆的。如果不可逆,可以使用伪逆方法:
phi = np.linalg.pinv(B) @ Y
- 数据精度:测量数据应尽量精确,以减少误差。
通过上述公式和代码,可以使用最小二乘法计算零位偏差,完成机器人零位标定。
6. 问题
6.1 为什么需要20个点?
在机器人零位标定中,选择多个测量点(例如 20 个点)是为了提高标定的精度和鲁棒性。以下是原因:
-
减少测量误差的影响:
- 单个点的测量可能存在误差(例如传感器噪声、环境干扰等)。
- 使用多个点可以通过最小二乘法将误差分散,从而得到更准确的零位偏差。
-
提高解的稳定性:
- 如果测量点过少,矩阵 B T ⋅ B B^T \cdot B BT⋅B 可能是奇异的(不可逆),导致无法求解。
- 增加测量点数量可以确保矩阵 B T ⋅ B B^T \cdot B BT⋅B 的条件数更好,从而提高解的稳定性。
-
覆盖更多的姿态空间:
- 通过选择不同的姿态(关节角度组合),可以覆盖更大的工作空间。
- 这有助于捕捉零位偏差在不同姿态下的影响,避免局部解。
-
减少过拟合风险:
- 如果测量点过少,可能会导致模型过拟合,无法准确反映实际的零位偏差。
- 增加点数可以让模型更具泛化能力。
-
满足最小二乘法的要求:
- 最小二乘法需要测量点的数量大于未知参数的数量(即 n > m n > m n>m,其中 n n n 是测量点数, m m m 是零位偏差的维度)。
- 选择 20 个点通常是为了确保足够的数据冗余。
总结来说,选择 20 个点是为了在数据冗余、解的稳定性和精度之间取得平衡,同时确保标定结果的可靠性。
相关文章:
机器人零位标定修正流程介绍
如果想看运动学标定可以看看 机器人运动学参数标定, 一次性把运动学参数和零位标定等一起标定求解. 1. 零位标定 零位标定是机器人运动学标定中的一个重要步骤,其目的是校正机器人关节的初始位置误差。以下是需要进行零位标定的主要原因: 制造误差 在机…...

大疆无人机系列知识
目录 知识 开发者文档 (上云) 无人机的应用 知识 大疆行业无人机接入音视频平台协议详解_大疆无人机 视频流-CSDN博客 开发者文档 (上云) 上云API 无人机的应用 【大疆无人机地图测绘技术学习:高精度、高效率的…...
深入 C++ 线程库:从创建到同步的探索之旅
目录 创建多线程 获取线程返回值 1.传指针 2.传引用 原子操作 互斥量 互斥量(Mutex)的基本概念 mutex类型介绍 锁的类型 互斥锁(Mutex) 自旋锁(Spin Lock) 读写锁(Read - Write Lo…...
【2025年认证杯数学中国数学建模网络挑战赛】A题 解题建模过程与模型代码(基于matlab)
目录 【2025年认证杯数学建模挑战赛】A题解题建模过程与模型代码(基于matlab)A题 小行星轨迹预测解题思路第一问模型与求解第二问模型与求解 【2025年认证杯数学建模挑战赛】A题 解题建模过程与模型代码(基于matlab) A题 小行星轨…...

Rust重定义数据库内核:从内存安全到性能革命的破界之路
Rust语言正在颠覆传统数据库开发范式,其独特的所有权系统与零成本抽象能力,为攻克C/C时代遗留的内存泄漏、并发缺陷等顽疾提供全新解决方案。本文通过TiKV、Materialize等新一代数据库核心组件的实践案例,剖析Rust如何重塑存储引擎、查询优化…...
初治成人患者诊疗中的应用研究)
大模型在慢性髓细胞白血病(CML)初治成人患者诊疗中的应用研究
目录 一、引言 1.1 研究背景与意义 1.2 国内外研究现状 1.3 研究目的与内容 二、大模型技术与 CML 相关知识 2.1 大模型技术原理与特点 2.2 CML 的病理生理与诊疗现状 三、术前风险预测与手术方案制定 3.1 术前数据收集与预处理 3.2 大模型预测术前风险 3.3 根据预测…...
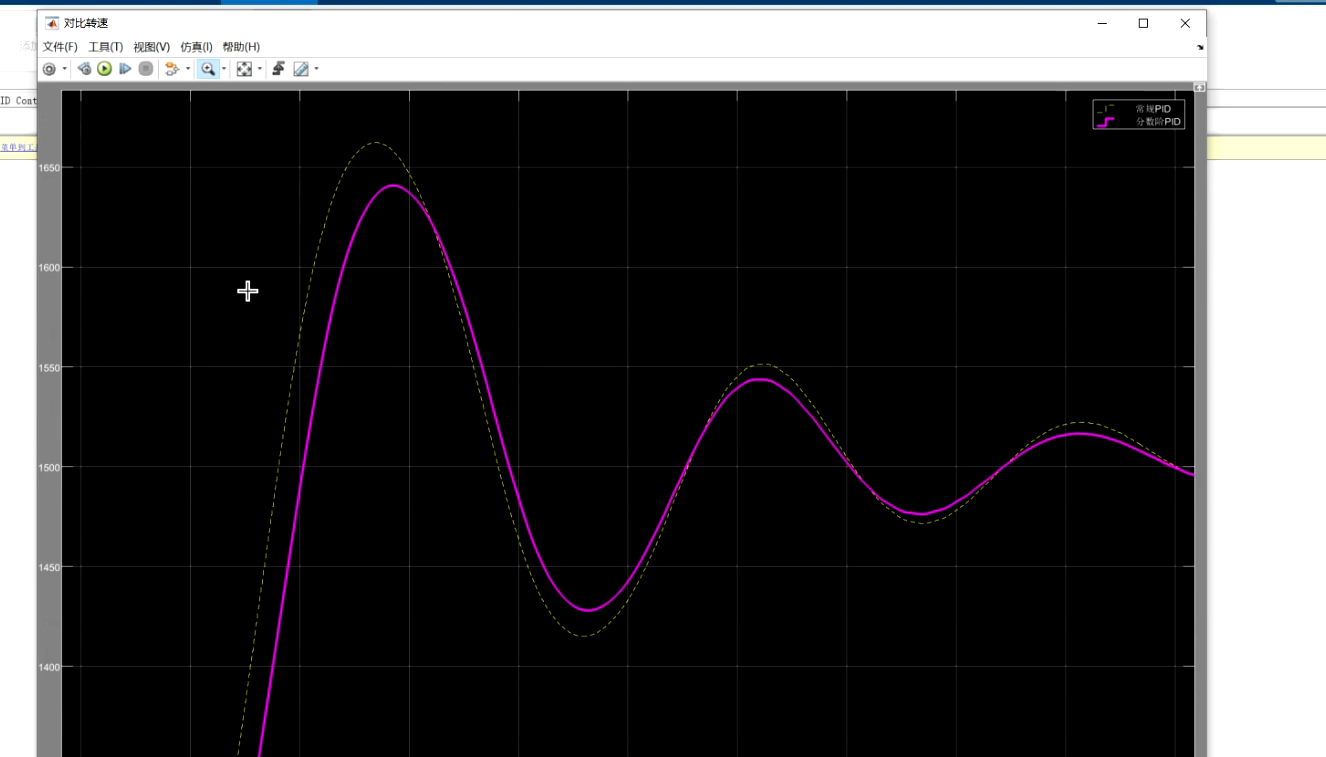
Matlab 分数阶PID控制永磁同步电机
1、内容简介 Matlab 203-分数阶PID控制永磁同步电机 可以交流、咨询、答疑 2、内容说明 略 3、仿真分析 略 4、参考论文 略...
)
GO语言入门-反射5(结构体的Tag)
12.5 结构体的 Tag 在定义结构体类型时,可以在字段后面加上一个字符串,称为 Struct Tag。Tag 主要用来补充附加信息。 Tag 由多个 key - value 构成,并以空格来分隔,key 和 value 之间用英文的冒号分隔。其格式如下:…...

免费下载 | 2025电力数据资产管理体系白皮书
本文是一份关于2025年电力数据资产管理体系的白皮书,详细阐述了电力数据要素和数据资产管理的现状、挑战、发展进程以及电网数据资产管理体系的构建与实践。白皮书强调了数据作为生产要素的重要性,并提出了电网数据资产管理体系的创新模式,旨…...
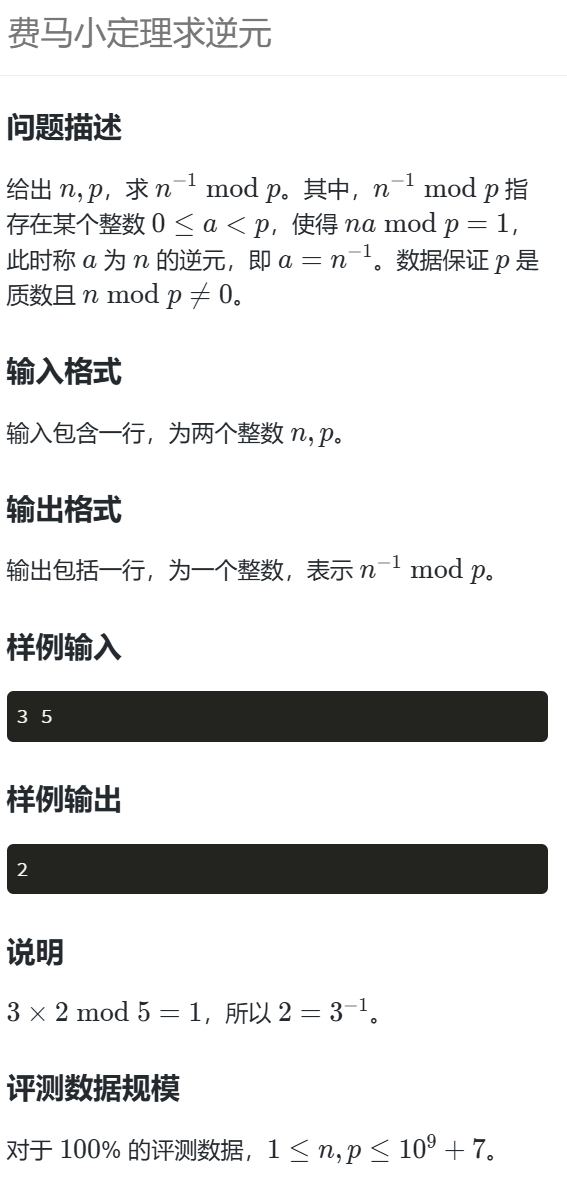
4185 费马小定理求逆元
4185 费马小定理求逆元 ⭐️难度:简单 🌟考点:费马小定理 📖 📚 import java.util.Scanner; import java.util.Arrays;public class Main {static int[][] a;public static void main(String[] args) {Scanner sc …...

处理Excel表不等长时间序列用tsfresh提取时序特征
我原本的时间序列格式是excel表记录的,每一行是一条时间序列,时间序列不等长。 要把excel表数据读取出来之后转换成extract_features需要的格式。 1.读取excel表数据 import pandas as pd import numpy as np from tsfresh import extract_features mda…...

从keys到SCAN:Redis批量删除的进化之路
标签:Redis、批量删除、前缀匹配、性能优化 一、痛点分析:为什么需要批量删除指定前缀的键? 在 Redis 使用过程中,我们经常会遇到这样的场景: 需要对某一类数据进行清理,例如用户会话、缓存数据等,而这些数据通常以某种前缀命名(如 user:session:*、cache:data:*)。如…...
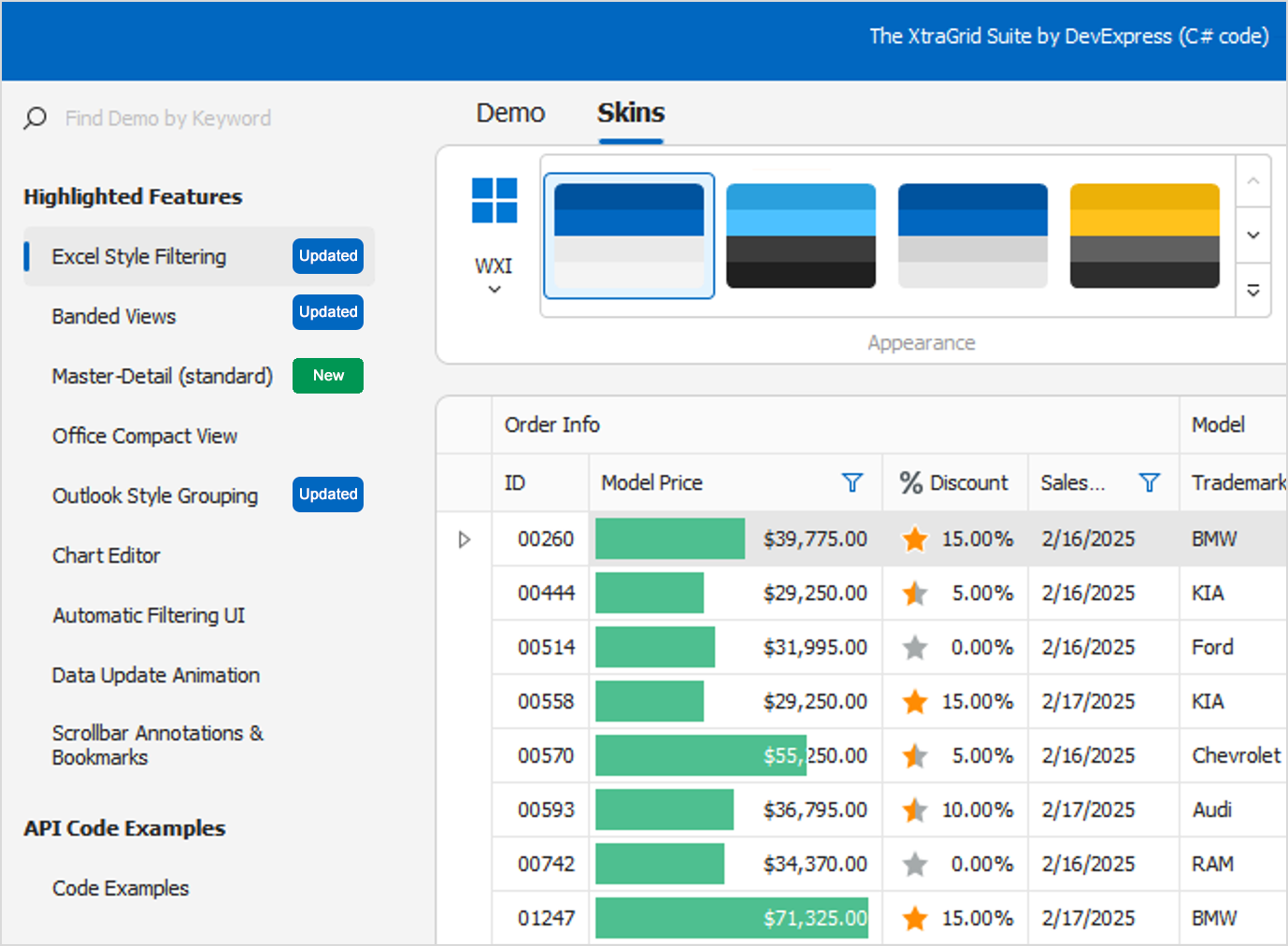
界面控件DevExpress WinForms v25.1新功能预览 - 聚焦用户体验升级
DevExpress WinForms拥有180组件和UI库,能为Windows Forms平台创建具有影响力的业务解决方案。DevExpress WinForms能完美构建流畅、美观且易于使用的应用程序,无论是Office风格的界面,还是分析处理大批量的业务数据,它都能轻松胜…...
卷积神经网络(CNN)基础
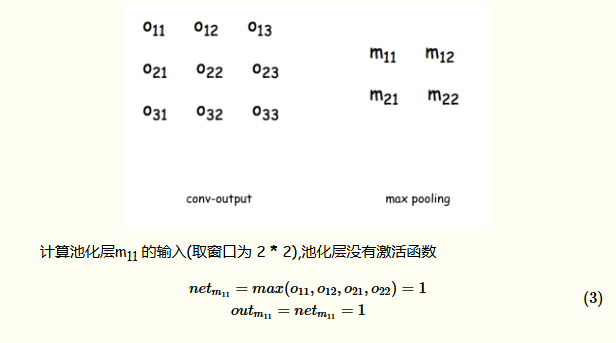
目录 一、应用场景 二、卷积神经网络的结构 1. 输入层(Input Layer) 2. 卷积层(Convolutional Layer) 3. 池化层(Pooling Layer) 最大池化(max_pooling)或平均池化(…...
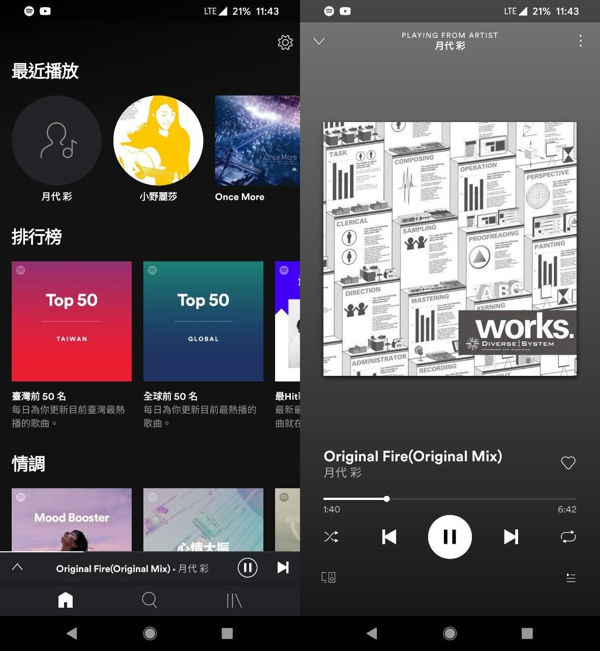
Android Spotify-v9.0.36.443-arm64-Experimental Merged版
Android Spotify 链接:https://pan.xunlei.com/s/VONXTdIv9d4FnAiNMMliIAEJA1?pwdxt7q# Android Spotify-v9.0.36.443-arm64-Experimental Merged版 享受高达256kbps的AAC音频。...

html元素转图像之深入探索 html - to - image:功能、应用与实践
html元素转图像之深入探索 html-to-image:功能、应用与实践 一、引言 使用该插件 需要注意页面上的图片都能正常显示,否则会报错,或生成的图片有误,注意注意。 在当今数字化内容丰富多样的时代,将网页上的特定 HTML…...

LLM之Agent(十六)| MCP已“过时”?Google近期推出Agent2Agent 协议 (A2A)
如今,企业越来越多地构建和部署自主代理,以帮助扩展、自动化和增强整个工作场所的流程 - 从订购新笔记本电脑到协助客户服务代表,再到协助供应链规划。 为了最大限度地发挥代理 AI 的优势,这些代理能够在一个动态的、多代理的生态…...
Transformer 训练:AutoModelForCausalLM,AutoModelForSequenceClassification
Transformer 训练:AutoModelForCausalLM,AutoModelForSequenceClassification 目录 Transformer 训练:AutoModelForCausalLM,AutoModelForSequenceClassification`AutoTokenizer.from_pretrained(model_name, trust_remote_code=True)`功能概述参数解释`AutoModelForSequen…...

网络安全1
一、网络安全的定义与重要性 定义 网络安全(信息技术安全):保护计算机系统和网络免受电子攻击的技术和过程,包括保护个人信息和企业数据不被盗窃、破坏或非法访问。涵盖范围:网络设备、数据传输、系统运行安全。 重要…...

Java学习总结-端口-协议
端口号:一个16位的二进制,范围是0-65535 端口分类: 周知端口:0-1023,被预先定义的知名应用占用(如:HTTP占用80,FTP占用21) 注册端口:1024-49151࿰…...

克魔助手(Kemob)安装与注册完整教程 - Windows/macOS双平台指南
iOS设备管理工具克魔助手便携版使用全指南 前言:为什么需要专业的iOS管理工具 在iOS开发和设备管理过程中,开发者经常需要突破系统限制,实现更深层次的控制和调试。本文将详细介绍一款实用的便携式工具的使用方法,帮助开发者快速…...
时实时获取 COCO 指标(AP):2025最新配置与代码详解 (小白友好 + B站视频))
✅ Ultralytics YOLO 训练(Train)时实时获取 COCO 指标(AP):2025最新配置与代码详解 (小白友好 + B站视频)
✅ YOLO获取COCO指标(4): 训练(Train)启用COCO API评估(实时监控AP指标)| 发论文必看! | Ultralytics | 小白友好 文章目录 一、问题定位二、原理分析三、解决方案与实践案例步骤 1: 在 model.train() 调用中设置 save_jsonTrue步骤 2: 修改 …...

qwen-vl 实现OCR的测试
OCR 技术是数字化时代必不可少的实用工具。以前都依赖专业的公司的专业软件才能完成。成本很高。也正因为如此,我国纸质资料的数字化并不普及。基于大模型的ORC 也许会改变这样的现状。 文本识别,也称为光学字符识别 (OCR),可以将印刷文本或…...
算法训练之动态规划(五)——简单多状态问题
♥♥♥~~~~~~欢迎光临知星小度博客空间~~~~~~♥♥♥ ♥♥♥零星地变得优秀~也能拼凑出星河~♥♥♥ ♥♥♥我们一起努力成为更好的自己~♥♥♥ ♥♥♥如果这一篇博客对你有帮助~别忘了点赞分享哦~♥♥♥ ♥♥♥如果有什么问题可以评论区留言或者私信我哦~♥♥♥ ✨✨✨✨✨✨ 个…...
)
C++ 大数相加(简要版)
#include <algorithm> #include <iterator> class Solution { public:/*** 计算两个数之和* param s string字符串 表示第一个整数* param t string字符串 表示第二个整数* return string字符串*/string solve(string s, string t) {// 处理空字符串的情况…...

SVMSPro分布式综合安防管理平台-->以S3存储革新,开启智能安防新纪元
SVMSPro分布式综合安防管理平台–>以S3存储革新,开启智能安防新纪元 在数字化转型浪潮下,企业安防管理正面临海量数据存储、跨区域协同以及数据安全的严峻挑战。如何实现高效、弹性、低成本的存储扩容?如何确保关键录像数据万无一失&…...

KV Cache大模型推理加速功能
KV Cache KV Cache是大模型标配的推理加速功能,也是推理过程中,显存资源巨大开销的元凶之一。在模型推理时,KV Cache在显存占用量可达30%以上。 目前大部分针对KV Cache的优化工作,主要集中在工程上。比如著名的VLLM,…...

速盾:高防CDN节点对收录有影响吗?
引言 搜索引擎收录是网站运营中至关重要的环节,它直接影响着网站的曝光度和流量。近年来,随着网络安全威胁的增加,许多企业开始采用高防CDN(内容分发网络)来保护其网站免受DDoS攻击和其他形式的网络攻击。然而&#x…...

脑科学与人工智能的交叉:未来智能科技的前沿与机遇
引言 随着科技的迅猛发展,脑科学与人工智能(AI)这两个看似独立的领域正在发生深刻的交汇。脑机接口、神经网络模型、智能机器人等前沿技术,正带来一场跨学科的革命。这种结合不仅推动了科技进步,也在医疗、教育、娱乐等…...

Linux 系统中从源码编译安装软件
以下是 Linux 系统中 从源码编译安装软件 的详细步骤和注意事项,帮助你掌握这一高级操作技能: 一、编译安装的核心流程 1. 下载源码包(通常为 .tar.gz/.tar.bz2/.tar.xz) 2. 解压源码包 3. 进入源码目录 4. 配置编译参数…...