Science Robotics 新型层级化架构实现250个机器人智能组队,“单点故障”系统仍可稳定运行
近期,比利时布鲁塞尔自由大学博士生朱炜煦与所在团队提出了一种创新的机器人群体架构——“自组织神经系统”(SoNS,Self-organizing Nervous System)。
它通过模仿自然界中的生物神经系统的组织原理,为机器人群体建立了一套具有明确规则的有序协商机制,从而实现了动态多级系统架构的自主构建、维护和实时重构。
(来源:Science Robotics)
SoNS 架构的关键创新在于其自组织的层次结构设计,它允许机器人群体在完全去中心化条件下,通过局部集中的信息处理方式协调感知、行动和决策的协同优化。
具体而言,该架构具有以下关键特征:
首先,保留了传统群体机器人系统的可扩展性和灵活性优势。
其次,通过引入层级化组织原则,显著提升了群体在复杂任务中的决策效率与执行能力。
更重要的是,系统能够基于局部信息实现全局优化。这些特性极大简化了机器人集群的编程难度。
图丨照片拍摄于新冠疫情后期,经过多年的准备,朱炜煦和团队准备进行第一次实验(来源:朱炜煦)
研究团队通过多模态实验验证了 SoNS 架构的实用价值。在物理实验层面,系统成功协调了由 17 个异构无人机与地面机器人组成的混合群体;在仿真环境中,研究规模进一步扩展至 250 个机器人。
这些实验涵盖了二元决策制定、搜索救援等多个典型应用场景。值得关注的是,所有测试均证实系统具备优异的容错性能,能够确保单个节点的故障不会影响整体系统的稳定运行。这一特性为 SoNS 在现实复杂环境中的应用提供了重要保障。
解决群体智能的关键瓶颈:从“牵一发动全身”到“离了谁都能转”
一般来说,传统群体机器人采用去中心化的模式,即群体中的每个成员地位平等,通过共同协商来解决问题。
然而,这种模式存在两个关键性缺陷:
首先,去中心化机制具有较高的部署成本,研究人员需要为每个机器人单独编程,摸索不同机器人的个体行为所涌现出群体整体效果,这一过程既耗时又耗费资源。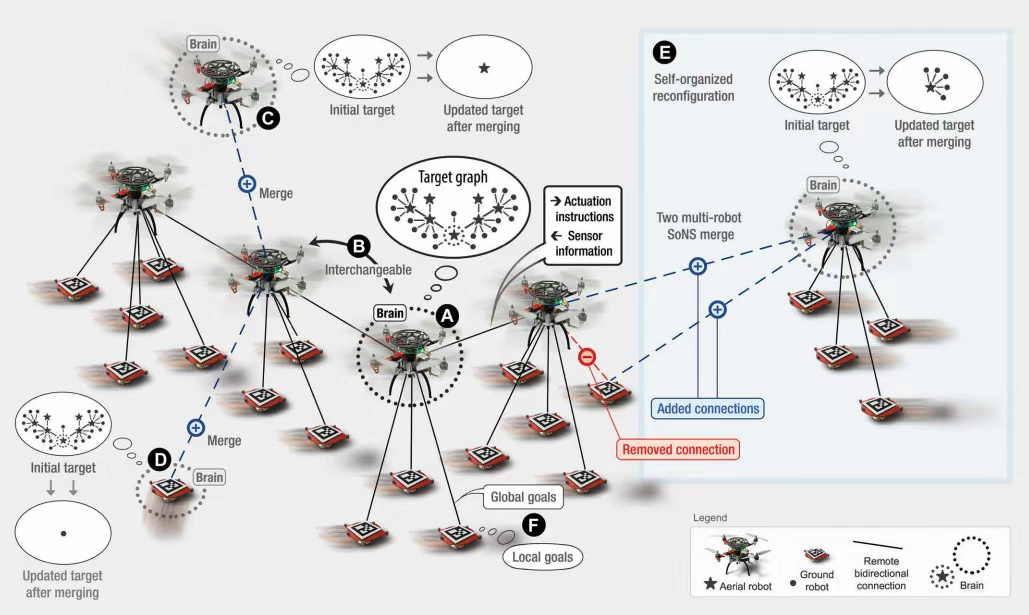
其次,由于通信仅限于相邻机器人之间,每个个体只能获取局部信息,难以形成有效的全局决策,导致系统整体效率低下。
(来源:朱炜煦)
相比之下,SoNS 的优势体现在“自上而下”的控制方式,通过建立有序的信息传递机制克服了传统系统的局限性。
在该架构中,每个机器人基于局部感知信息和邻域通信自主决定其在群体中的角色和行为,同时通过层级化的信息传递机制(类似“接力棒”模式)实现全局信息的分布式共享。
图丨 SoNS 概念(来源:Science Robotics)
这种设计使得机器人群体能够基于更全面的信息做出接近全局最优的决策,与此同时,保持对环境变化和任务需求的快速响应能力,并维持系统整体的稳定性和运行效率。更重要的是,SoNS 允许将机器人集群视为单一实体进行编程,大幅简化了新任务的部署流程。
实验验证表明,SoNS 架构在多个维度展现出显著优势。在功能性测试中,系统成功完成了障碍物避让、集体感知与行动、二元决策制定以及群体分裂合并等复杂任务。
具体表现为:在障碍规避场景下,机器人群体能自主调整形态并保持连接;面对动态环境变化,系统可实时优化行动路线;在二元决策任务中,实现了传统系统难以完成的群体共识。
Science Robotics 新型层级化架构实现250个机器人智能组队,“单点故障”系统仍可稳定运行 观看更多转载,Science Robotics 新型层级化架构实现250个机器人智能组队,“单点故障”系统仍可稳定运行CAAI认知系统与信息处理专委会已关注分享点赞在看已同步到看一看写下你的评论 视频详情 (来源:Science Robotics)
在容错性方面,SoNS 展现出类生物系统的自修复特性。通过动态邻域连接机制,当检测到相邻机器人失效时,系统能自动重建通信链路并重组拓扑结构。这种“去中心化冗余”设计确保了系统在部分节点失效时仍能维持功能完整,这对实际应用中的可靠性至关重要。
“就像我们经常说的‘地球离了谁都能转’那样,即使部分机器人发生故障或失去连接,SoNS 架构仍能够快速重新组织,并利用剩余的机器人继续完成任务,这种容错能力对于机器人群体在现实世界中的应用至关重要。”朱炜煦解释说道。
具体来说,每个机器人只与相邻的机器人通信。如果发现相邻的机器人不见了,它会迅速与下一个机器人建立连接。连接成功后,它们会调整结构并继续寻找下一个通信伙伴。这样,即使有一部分机器人失效,相邻的机器人也能迅速填补这个缺口。
此外,SoNS 架构在模拟实验中展现了良好的可扩展性。研究人员在真实环境下,进行了 17 个机器人集群实验。在模拟环境中测试了多达 250 个机器人的群体。结果表明,SoNS 架构能够在这样大规模的群体中有效地工作,且通信和计算负荷保持在合理范围内。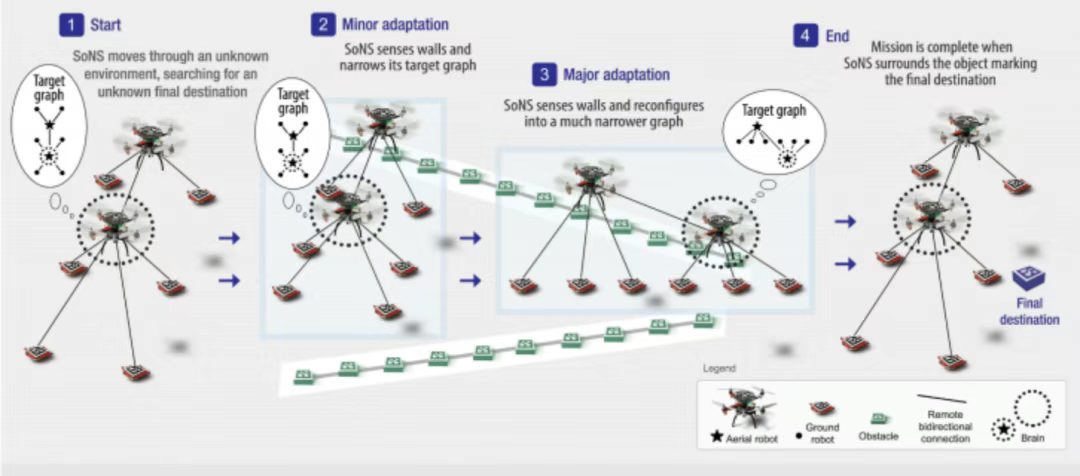
图丨集体感知和驱动(来源:Science Robotics)
在论文发表后,该课题组进一步将规模扩大到 1000 台机器人。朱炜煦指出,随着群体规模扩大,单个机器人的计算开销保持恒定,不会出现性能退化。这一特性源于群体机器人固有的可扩展性,群体中所有机器人都只依靠有限的局部信息,群体规模的扩大不会对单个机器人产生影响。
实际上,SoNS 指导群体机器人从传统的无序状态转变为一种有规模、有秩序的状态。同时,SoNS 架构也保留了群体机器人固有的特点——即使部分机器人失效,整个系统也能够顺利完成任务。
另一个值得关注的方面在于,SoNS 在群体决策方面取得的突破。传统去中心化系统实现效率不高的二元共识问题,在该架构下得到了有效解决。
这一进步不仅具有理论意义,更为机器人集群在需要快速集体决策的场景(如应急响应、协同搜索等)中的应用开辟了新途径。
用筷子“夹”出摄像头的稳定性
该研究共经历 7 年时间,贯穿了朱炜煦的整个博士生涯。实际上,该研究中最耗时的部分并不是算法开发和优化,而是搭建和调试硬件平台,包括研制定制化无人机和地面移动机器人,以及搭建完整的实验环境。
在硬件研发过程中,该团队面临诸多技术难题。以无人机平台为例,研究人员发现,当搭载底部摄像头的无人机起飞后,由于机体振动导致拍摄画面严重模糊,这一问题直接影响了视觉定位和群体协同的精度。
在一次与课题组成员的技术讨论中,朱炜煦受到日常生活中使用筷子固定物品的启发,提出了采用类似原理的机械稳定方案。
初步实验证实这一构想的有效性,但考虑到工程应用的严谨性,他们最终基于“筷子原理”设计了更为专业的减震机构,通过优化机械结构和材料选择,系统性地解决了这一技术瓶颈。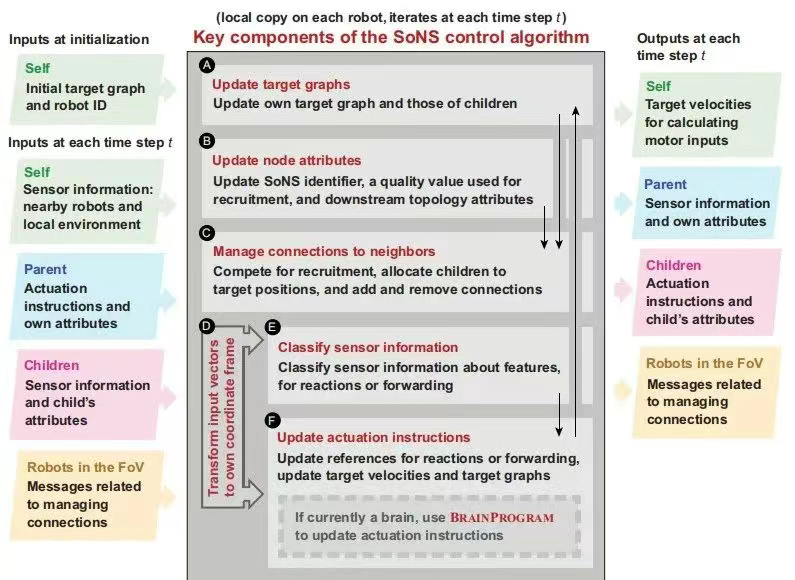
图丨 SoNS 控制算法的关键组成部分(来源:Science Robotics)
该研究的工业应用价值在对比分析中尤为凸显。现有工业级集群系统普遍采用中心化控制架构,即地面控制基站与每架无人机建立直接通信链路。朱炜煦解释说道:“如果无人机数量过多,地面基站就会不堪重负;或者如果地面基站出现问题,整个系统则会瘫痪。”
相比之下,SoNS 框架通过分布式组网技术实现了革命性改进:地面操作人员仅需与集群中的任一节点通信,信息即可通过自组织网络进行可靠传递。
这种架构不仅大幅降低了通信带宽需求,更重要的是实现了真正的去中心化容错——即使部分无人机节点或地面控制基站发生故障,系统仍能维持基本功能。
以当前热门的无人机编队表演为例,实际演出中因通信中断导致的坠机事故屡见不鲜。传统方案需要每架无人机和地面基站之间建立独立通信链路,这不仅造成高昂的基础设施成本,更形成了单点故障风险。
若采用 SoNS 架构,系统只需维持最低限度的基础通信,通过群体智能实现自组织飞行控制。仿真实验表明,即使完全失去地面控制信号,无人机集群仍能基于预设程序和安全协议保持基本队形,这为大规模无人机表演提供了全新的技术范式。
日前,相关论文以《机器人群体的自组织神经系统》(Self-organizing Nervous Systems for Robot Swarms)为题发表在 Science Robotics 上 [1]。
布鲁塞尔自由大学博士生朱炜煦、辛南·奥古兹(Sinan Oğuz)和玛丽·凯瑟琳·海因里希(Mary Katherine Heinrich)博士是共同第一作者,马尔科·多里戈(Marco Dorigo)教授担任通讯作者。
图丨相关论文(来源:Science Robotics)
朱炜煦本科就读于武汉大学第一届弘毅学堂计算机班,并继续在该校完成研究生阶段学习。他从儿时开始就对蚂蚁等昆虫产生浓厚兴趣,这种早期观察为他日后研究群体智能埋下了种子。
初中时期,他在科幻作品中首次接触到“群体智能”的概念,这一启蒙经历促使他在本科和研究生阶段都持续聚焦该领域。在布鲁塞尔自由大学攻读博士学位期间,师从蚁群算法创始人马尔科·多里戈(Marco Dorigo)教授的经历,使他的学术视野得到显著拓展。
博士二年级的一次中期考核成为朱炜煦科研思维转变的关键点。当时,他着重展示了技术实现和工程细节方面的工作,导师的评价“你是一名不错的工程师,但还不是优秀的科学家”促使他深入反思科研方法论。
这次经历对他触动很深,也让他意识到,优秀的科研工作不仅需要解决技术问题,更要站在更开阔的视角去思考其科学意义和领域贡献。
群体智能作为人工智能的重要分支,在朱炜煦看来,其未来有趣的发展方向之一是:在群体中,决策不再由单一个体(如地面站或某架无人机)做出,而是由群体共同组成一个传统意义上的 AI 神经网络来进行决策。这种创新将推动群体智能从集中式控制向真正分布式协同的范式转变。
基于本次成果,研究人员计划在两个方向继续探索:一是构建纯无人机集群系统,消除对地面机器人的依赖,提升系统的空间适应能力;二是增强系统异构性,计划引入具备机械手的移动机器人。这类新型机器人将赋予集群物体操作能力,如搬运箱子等任务,并通过群体智能实现协同控制。
“这些探索不仅将扩展群体机器人的应用场景,也将为分布式智能系统研究提供新的理论和技术突破口。”朱炜煦说道。
相关文章:
Science Robotics 新型层级化架构实现250个机器人智能组队,“单点故障”系统仍可稳定运行
近期,比利时布鲁塞尔自由大学博士生朱炜煦与所在团队提出了一种创新的机器人群体架构——“自组织神经系统”(SoNS,Self-organizing Nervous System)。 它通过模仿自然界中的生物神经系统的组织原理,为机器人群体建立了…...

手写深拷贝函数
在 JavaScript 中,深拷贝是指创建一个对象或数组的完全独立副本,包括其嵌套的对象或数组。这意味着修改副本不会影响原始对象。 以下是手写一个通用的深拷贝函数的实现: 深拷贝函数实现 function deepClone(target, map new WeakMap()) {//…...
React 性能优化三剑客实战:告别无效重渲染!
在 Vue 中我们可能依赖 Vuex computed 进行状态共享和性能优化,而在 React 里呢?不需要用 Redux,靠 useContext、memo、useMemo 三剑客就能构建高性能组件通信方案! 🧩 useContext 再回顾:状态共享不等于性…...

深度学习3.3 线性回归的简洁实现
步骤操作作用前向计算net(X)计算预测值 y_hat Xw b损失计算loss(y_hat, y)量化预测误差,驱动参数更新反向传播l.backward()计算参数梯度参数更新trainer.step()根据梯度调整参数,逼近最优解梯度清零trainer.zero_grad()防止梯度累积(必须放…...

复盘20250422
深度分析及个股推荐 1. 行业前景与个股逻辑梳理 从提供的股票信息来看,主要涉及以下行业:合成尼古丁(电子烟)、化工、跨境支付、跨境电商、农药、食品饮料、光刻机、电子商务、造纸等。需结合行业景气度、政策支持、公司核心竞争…...

从零开始学习MySQL的系统学习大纲
文章目录 前言第一阶段:数据库与 MySQL 基础认知数据库基础概念MySQL 简介 第二阶段:MySQL 安装与环境搭建安装前的准备MySQL 安装过程安装后的配置 第三阶段:SQL 基础语法SQL 概述数据库操作数据表操作数据操作 第四阶段:SQL 高级…...

APP动态交互原型实例|墨刀变量控制+条件判断教程
引言 不同行业的产品经理在绘制原型图时,拥有不同的呈现方式。对于第三方软件技术服务公司的产品经理来说,高保真动态交互原型不仅可以在开发前验证交互逻辑,还能为甲方客户带来更直观、真实的体验。 本文第三部分将分享一个实战案例&#…...
)
基于控制台的小车导航游戏开发详解(C++实现)
本文将详细讲解一个基于C控制台的小车导航游戏项目。通过该项目可以学习二维数组操作、队列数据结构应用以及游戏循环控制等核心编程概念,特别适合刚接触游戏开发的初学者学习。 一、项目概述 1.1 游戏规则 玩家可创建多辆具有不同初始位置和移动速度的小车 每辆…...
色谱图QCPColorMap
一、QCPColorMap 概述 QCPColorMap 是 QCustomPlot 中用于绘制二维颜色图的类,可以将矩阵数据可视化为颜色图(热力图),支持自定义色标和插值方式。 二、主要属性 属性类型描述dataQCPColorMapData存储颜色图数据的对象interpol…...
,实现四位一体的网络感知型大文件传输系统)
大文件分片上传进阶版(新增md5校验、上传进度展示、并行控制,智能分片、加密上传、断点续传、自动重试),实现四位一体的网络感知型大文件传输系统
上篇文章我们总结了大文件分片上传的主要核心,但是我对md5校验和上传进度展示这块也比较感兴趣,所以在deepseek的帮助下,扩展了一下我们的代码,如果有任何问题和想法,非常欢迎大家在评论区与我交流,我需要学…...

oracle不同数据库版本的自增序列
-- 查看数据库版本 SELECT * FROM v$version WHERE banner LIKE Oracle%; 1. Oracle 12c及以上版本支持 id NUMBER GENERATED ALWAYS AS IDENTITY PRIMARY KEY, id NUMBER GENERATED ALWAYS AS IDENTITY (START WITH 1 INCREMENT BY 1) PRIMARY KEY, -- 语法 id NUMBER GENER…...
进行压力测试)
【KWDB创作者计划】_针对KWDB时序数据库(多副本集群环境)进行压力测试
【KWDB创作者计划】_针对KWDB时序数据库(多副本集群环境)进行压力测试 1. 概述2. 压测环境部署3. 生成测试数据4. 写入性能测试5. 查询性能测试7. 总结 1. 概述 KaiwuDB分布式多模数据库从物联网场景真实需求出发,针对性设计多模架构。物联网…...

极狐GitLab 自定义实例级项目模板功能介绍
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 自定义实例级项目模板 (PREMIUM SELF) 极狐GitLab 管理员可以将群组设置为在实例上创建新项目时可选择的项目模板的来源。然…...
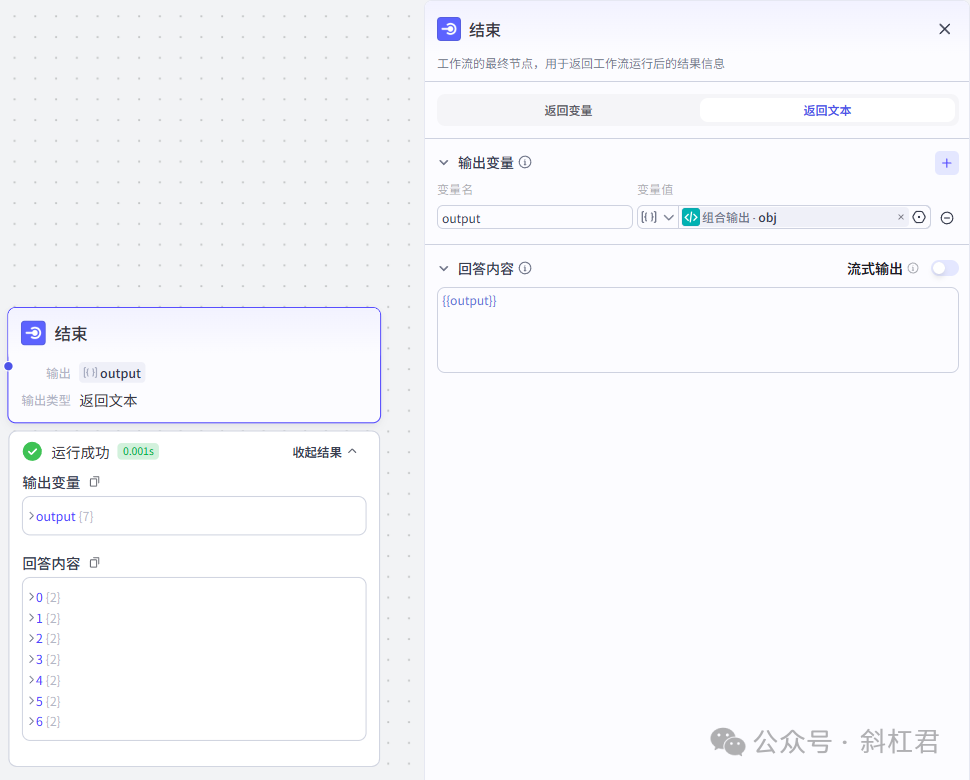
最新扣子(Coze)案例教程:飞书多维表格按条件筛选记录 + 读取分页Coze工作流,无限循环使用方法,手把手教学,完全免费教程
大家好,我是斜杠君。 👨💻 星球群里有同学想学习一下飞书多维表格的使用方法,关于如何通过按条件筛选飞书多维表格中的记录,以及如何使用分页解决最多一次只能读取500条的限制问题。 斜杠君今天就带大家一起搭建一…...

第八天 AI开发:NavMesh导航系统 对话系统:使用ScriptableObject存储对话数据 存档系统:JSON序列化保存数据
一、智能导航系统:NavMesh实战指南 1.1 导航网格基础配置 在Unity编辑器中: 选择场景中的静态物体勾选Navigation Static属性打开Window > AI > Navigation窗口 烘焙参数设置: NavMeshBuildSettings settings NavMesh.GetSettingsBy…...
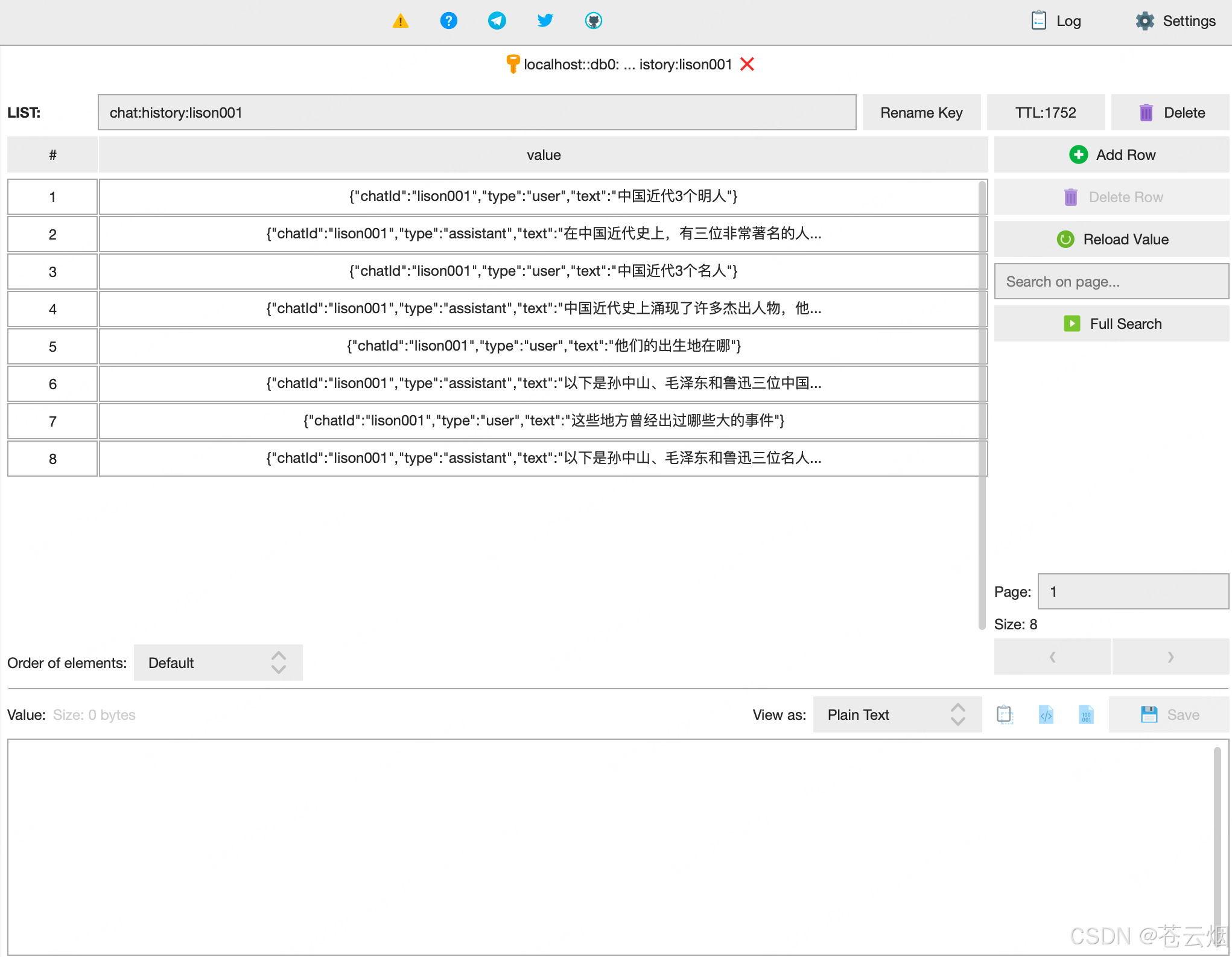
Spring AI Alibaba-02-多轮对话记忆、持久化消息记录
Spring AI Alibaba-02-多轮对话记忆、持久化消息记录 Lison <dreamlison163.com>, v1.0.0, 2025.04.19 文章目录 Spring AI Alibaba-02-多轮对话记忆、持久化消息记录多轮对话对话持久-Redis 本次主要聚焦于多轮对话功能的实现,后续会逐步增加更多实用内容&…...

联邦元学习实现个性化物联网的框架
随着数据安全和隐私保护相关法律法规的出台,需要直接在中央服务器上收集和处理数据的集中式解决方案,对于个性化物联网而言,训练各种特定领域场景的人工智能模型已变得不切实际。基于此,中山大学,南洋理工大学…...

做虚拟化应该怎么选择美国服务器?
选择适合做虚拟化的美国服务器,需要综合考虑硬件性能、网络质量、稳定性、价格和服务支持等多个方面。以下是详细的选购指南,适合准备搭建VPS、虚拟主机、分销业务、开发测试环境、容器集群等用途的用户参考。 一、为什么美国服务器适合虚拟化? 美国机房…...
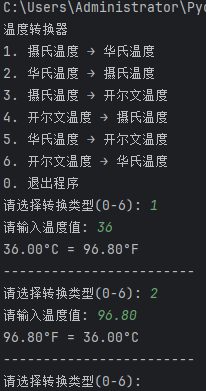
实验1 温度转换与输入输出强化
知识点:input()/print()、分支语句、字符串处理(教材2.1-2.2) 实验任务: 1. 实现摄氏温度与华氏温度互转(保留两位小数) 2. 扩展功能:输入错误处理(如非数字输入提示重新输入&#x…...

MongoDB 集合名称映射问题
项目场景 在使用 Spring Data MongoDB 进行开发时,定义了一个名为 CompetitionSignUpLog 的实体类,并创建了对应的 Repository 接口。需要明确该实体类在 MongoDB 中实际对应的集合名称是 CompetitionSignUpLog 还是 competitionSignUpLog。 问题描述 …...

【AI】SpringAI 第五弹:接入千帆大模型
1. 添加依赖 <dependency><groupId>org.springframework.ai</groupId><artifactId>spring-ai-starter-model-qianfan</artifactId> </dependency> 2. 编写 yml 配置文件 spring:ai:qianfan:api-key: 你的api-keysecret-key: 你的secr…...

【编码规范】原生开发 与 Vue+组件库开发
原生开发 vs Vue组件库开发对比 一、原生开发常用方法 DOM操作: document.getElementById()document.querySelector()element.addEventListener()classList API操作类名 事件处理: 直接事件绑定事件委托 document.body.addEventListener(click, functi…...
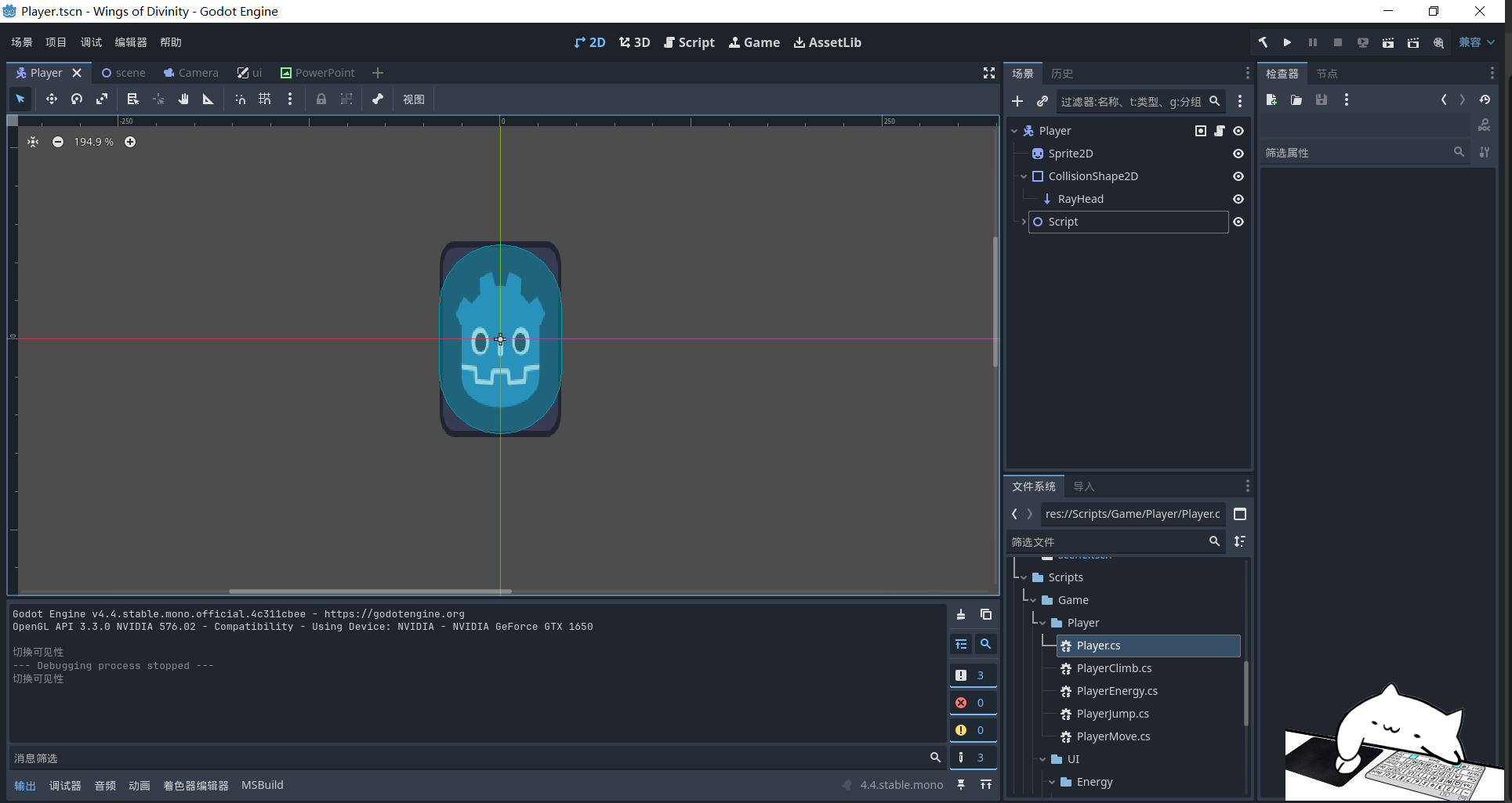
[Godot] C#2D平台游戏基础移动和进阶跳跃代码
本文章给大家分享一下如何实现基本的移动和进阶的跳跃(跳跃缓冲、可变跳跃、土狼时间)以及相对应的重力代码,大家可以根据自己的需要自行修改 实现效果 场景搭建 因为Godot不像Unity,一个节点只能绑定一个脚本,所以我…...

【Unity笔记】Unity + OpenXR项目无法启动SteamVR的排查与解决全指南
图片为AI生成 一、前言 随着Unity在XR领域全面转向OpenXR标准,越来越多的开发者选择使用OpenXR来构建跨平台的VR应用。但在项目实际部署中发现:打包成的EXE程序无法正常启动SteamVR,或者SteamVR未能识别到该应用。本文将以“Unity OpenXR …...
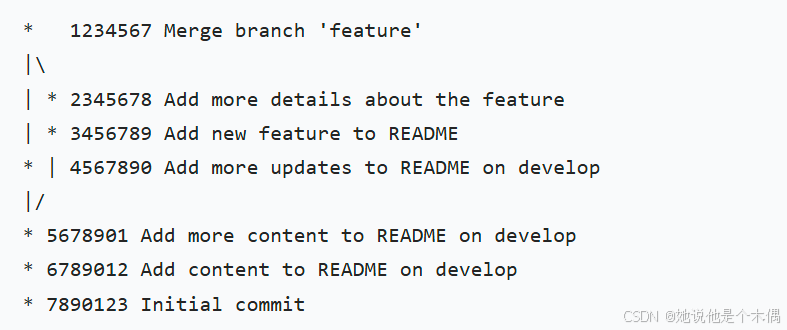
使用 rebase 轻松管理主干分支
前言 最近遇到一个技术团队的 dev 环境分支错乱,因为是多人合作大家各自提交信息,导致出现很多交叉合并记录,让对应 log 看起来非常混乱,难以阅读。 举例说明 假设我们有一个项目,最初develop分支有 3 个提交记录&a…...
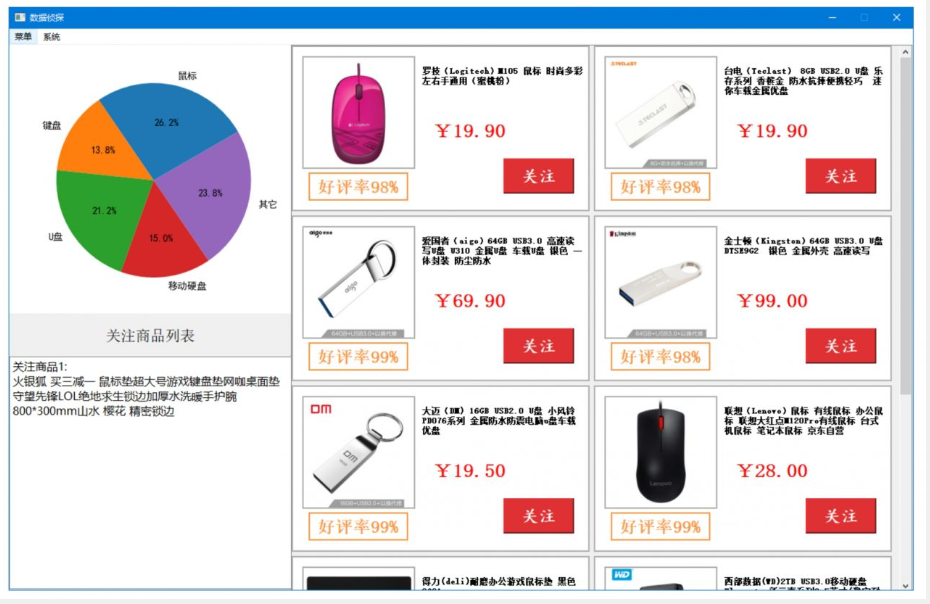
【愚公系列】《Python网络爬虫从入门到精通》063-项目实战电商数据侦探(主窗体的数据展示)
🌟【技术大咖愚公搬代码:全栈专家的成长之路,你关注的宝藏博主在这里!】🌟 📣开发者圈持续输出高质量干货的"愚公精神"践行者——全网百万开发者都在追更的顶级技术博主! …...
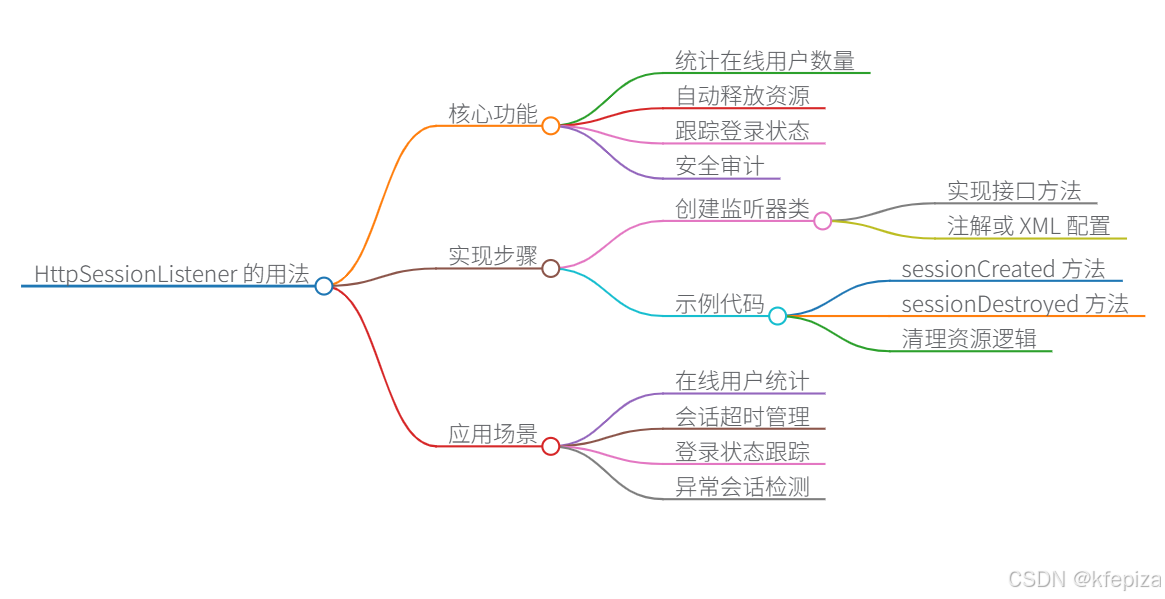
HttpSessionListener 的用法笔记250417
HttpSessionListener 的用法笔记250417 以下是关于 HttpSessionListener 的用法详解,涵盖核心方法、实现步骤、典型应用场景及注意事项,帮助您全面掌握会话(Session)生命周期的监听与管理: 1. 核心功能 HttpSessionLi…...

火山RTC 5 转推CDN 布局合成规则
实时音视频房间,转推CDN,文档: 转推直播--实时音视频-火山引擎 一、转推CDN 0、前提 * 在调用该接口前,你需要在[控制台](https://console.volcengine.com/rtc/workplaceRTC)开启转推直播功能。<br> * 调…...
Spark两种运行模式与部署
1. Spark 的运行模式 部署Spark集群就两种方式,单机模式与集群模式 单机模式就是为了方便开发者调试框架的运行环境。但是生产环境中,一般都是集群部署。 现在Spark目前支持的部署模式: (1)Local模式:在本地…...

react 父子组件通信 子 直接到父, 父 forwardref子
React核心概念:单向数据流(Unidirectional Data Flow) React 中数据的流动像瀑布一样,只能从上层组件(父组件)流向下层组件(子组件)。 子组件无法直接反向修改父组件的数据&#x…...