RViz(机器人可视化工具)的配置文件(moveitcpp)
1. Panels(面板设置)
面板是RViz界面中的各个功能区域,用于显示和操作不同的数据。
Displays(显示面板)
-
Class:
rviz_common/Displays
指定面板的类型,这里是显示面板。 -
Help Height:
78
帮助区域的高度(像素)。 -
Name:
Displays
面板的名称。 -
Property Tree Widget:
-
Expanded: 展开的属性树节点,这里列出了几个默认展开的节点,如
/Global Options1、/Status1等。 -
Splitter Ratio:
0.5
分割窗口的比例,用于控制面板的布局。
-
-
Tree Height:
583
属性树的高度(像素)。
Selection(选择面板)
-
Class:
rviz_common/Selection
用于选择和操作场景中的对象。 -
Name:
Selection
Tool Properties(工具属性面板)
-
Class:
rviz_common/Tool Properties
显示当前工具的属性。 -
Expanded: 展开的工具属性节点,如
/2D Goal Pose1、/Publish Point1。 -
Name:
Tool Properties -
Splitter Ratio:
0.5886790156364441
Views(视图面板)
-
Class:
rviz_common/Views
管理不同的视图设置。 -
Expanded: 展开的视图节点,如
/Current View1。 -
Name:
Views -
Splitter Ratio:
0.5
RvizVisualToolsGui(可视化工具面板)
-
Class:
rviz_visual_tools/RvizVisualToolsGui
用于显示额外的可视化工具。 -
Name:
RvizVisualToolsGui
2. Visualization Manager(可视化管理器)
这是RViz的核心部分,用于管理所有显示的内容。
Displays(显示内容)
这里是配置文件中定义的各种显示内容,包括网格、规划场景、轨迹等。
Grid(网格)
-
Alpha:
0.5
网格的透明度。 -
Cell Size:
1
网格单元的大小。 -
Class:
rviz_default_plugins/Grid
网格的类型。 -
Color:
160; 160; 164
网格的颜色(RGB值)。 -
Enabled:
true
是否启用网格显示。 -
Line Style:
-
Line Width:
0.029999999329447746
线宽。 -
Value:
Lines
线的样式。
-
-
Name:
Grid
网格的名称。 -
Normal Cell Count:
0
法线方向的单元格数量。 -
Offset:
{X: 0, Y: 0, Z: 0}
网格的偏移量。 -
Plane:
XY
网格所在的平面。 -
Plane Cell Count:
10
平面上的单元格数量。 -
Reference Frame:
<Fixed Frame>
参考坐标系。 -
Value:
true
PlanningScene(规划场景)
-
Class:
moveit_rviz_plugin/PlanningScene
规划场景的类型。 -
Enabled:
true
是否启用规划场景显示。 -
Move Group Namespace:
""
移动组的命名空间。 -
Name:
PlanningScene
规划场景的名称。 -
Planning Scene Topic:
/moveit_cpp/monitored_planning_scene
规划场景的主题。 -
Robot Description:
robot_description
机器人的描述。 -
Scene Geometry:
-
Scene Alpha:
0.8999999761581421
场景的透明度。 -
Scene Color:
50; 230; 50
场景的颜色。 -
Scene Display Time:
0.20000000298023224
场景显示的时间。 -
Show Scene Geometry:
true
是否显示场景几何。 -
Voxel Coloring:
Z-Axis
体素的颜色方向。 -
Voxel Rendering:
Occupied Voxels
体素的渲染方式。
-
-
Scene Robot:
-
Attached Body Color:
150; 50; 150
附加物体的颜色。 -
Links: 机器人的各个连接部分,如
panda_hand、panda_link0等。-
Alpha:
1
透明度。 -
Show Axes:
false
是否显示坐标轴。 -
Show Trail:
false
是否显示轨迹。 -
Value:
true
是否启用显示。
-
-
Robot Alpha:
1
机器人的透明度。 -
Show Robot Collision:
false
是否显示碰撞模型。 -
Show Robot Visual:
true
是否显示视觉模型。
-
-
Value:
true
Trajectory(轨迹)
-
Class:
moveit_rviz_plugin/Trajectory
轨迹的类型。 -
Color Enabled:
false
是否启用颜色。 -
Enabled:
true
是否启用轨迹显示。 -
Interrupt Display:
false
是否中断显示。 -
Links: 机器人的各个连接部分,如
panda_hand、panda_link0等。-
Alpha:
1
透明度。 -
Show Axes:
false
是否显示坐标轴。 -
Show Trail:
false
是否显示轨迹。 -
Value:
true
是否启用显示。
-
-
Loop Animation:
false
是否循环动画。 -
Name:
Trajectory
轨迹的名称。 -
Robot Alpha:
0.5
机器人的透明度。 -
Robot Color:
150; 50; 150
机器人的颜色。 -
Robot Description:
robot_description
机器人的描述。 -
Show Robot Collision:
false
是否显示碰撞模型。 -
Show Robot Visual:
true
是否显示视觉模型。 -
Show Trail:
false
是否显示轨迹。 -
State Display Time:
0.05 s
状态显示的时间。 -
Trail Step Size:
1
轨迹步长。 -
Trajectory Topic:
/display_planned_path
轨迹的主题。 -
Value:
true
MarkerArray(标记数组)
-
Class:
rviz_default_plugins/MarkerArray
标记数组的类型。 -
Enabled:
true
是否启用标记数组显示。 -
Name:
MarkerArray
标记数组的名称。 -
Namespaces: 包含的命名空间,如
Text、start_pose、target_pose。 -
Topic:
-
Depth:
5
深度。 -
Durability Policy:
Volatile
持久性策略。 -
History Policy:
Keep Last
历史策略。 -
Reliability Policy:
Reliable
可靠性策略。 -
Value:
/moveit_cpp_tutorial
主题名称。
-
-
Value:
true
Global Options(全局选项)
-
Background Color:
48; 48; 48
背景颜色。 -
Fixed Frame:
panda_link0
固定坐标系。 -
Frame Rate:
30
帧率。
Tools(工具)
这部分定义了 RViz 中可用的工具及其属性。
Interact
-
Class:
rviz_default_plugins/Interact
交互工具,允许用户通过鼠标操作场景中的对象。 -
Hide Inactive Objects:
true
是否隐藏非活动对象,即不被选中的对象将不会显示交互控件。
MoveCamera
-
Class:
rviz_default_plugins/MoveCamera
移动相机工具,允许用户通过鼠标操作来改变视图的视角和位置。
Select
-
Class:
rviz_default_plugins/Select
选择工具,用于选择场景中的对象。
FocusCamera
-
Class:
rviz_default_plugins/FocusCamera
聚焦相机工具,用于将相机焦点对准选定的对象。
Measure
-
Class:
rviz_default_plugins/Measure
测量工具,用于测量场景中两点之间的距离。 -
Line color:
128; 128; 0
测量线的颜色(RGB值)。
SetInitialPose
-
Class:
rviz_default_plugins/SetInitialPose
设置初始姿态工具,用于发布初始姿态信息。 -
Topic:
-
Depth:
5
消息队列的深度。 -
Durability Policy:
Volatile
消息持久性策略,表示消息不会持久化。 -
History Policy:
Keep Last
历史策略,表示只保留最后几条消息。 -
Reliability Policy:
Reliable
可靠性策略,表示消息传输是可靠的。 -
Value:
/initialpose
发布的主题名称。
-
SetGoal
-
Class:
rviz_default_plugins/SetGoal
设置目标姿态工具,用于发布目标姿态信息。 -
Topic:
-
Depth:
5
消息队列的深度。 -
Durability Policy:
Volatile
消息持久性策略,表示消息不会持久化。 -
History Policy:
Keep Last
历史策略,表示只保留最后几条消息。 -
Reliability Policy:
Reliable
可靠性策略,表示消息传输是可靠的。 -
Value:
/goal_pose
发布的主题名称。
-
PublishPoint
-
Class:
rviz_default_plugins/PublishPoint
发布点工具,用于发布鼠标点击的点信息。 -
Single click:
true
是否允许单击发布点。 -
Topic:
-
Depth:
5
消息队列的深度。 -
Durability Policy:
Volatile
消息持久性策略,表示消息不会持久化。 -
History Policy:
Keep Last
历史策略,表示只保留最后几条消息。 -
Reliability Policy:
Reliable
可靠性策略,表示消息传输是可靠的。 -
Value:
/clicked_point
发布的主题名称。
-
Transformation(变换)
这部分定义了当前使用的变换系统。
-
Current:
-
Class:
rviz_default_plugins/TF
当前使用的变换系统是 TF(Transform)。
-
Views(视图)
这部分定义了当前视图的设置。
-
Current:
-
Class:
rviz_default_plugins/Orbit
当前视图类型是轨道视图。 -
Distance:
2.943387746810913
相机到焦点的距离。 -
Enable Stereo Rendering:
-
Stereo Eye Separation:
0.05999999865889549
立体渲染时双眼的分离距离。 -
Stereo Focal Distance:
1
立体渲染时的焦点距离。 -
Swap Stereo Eyes:
false
是否交换立体渲染的双眼。 -
Value:
false
是否启用立体渲染。
-
-
Focal Point:
-
X:
-0.3850630223751068 -
Y:
-0.21364367008209229 -
Z:
0.6843962073326111
焦点的坐标。
-
-
Focal Shape Fixed Size:
true
焦点形状是否固定大小。 -
Focal Shape Size:
0.05000000074505806
焦点形状的大小。 -
Invert Z Axis:
false
是否反转 Z 轴。 -
Name:
Current View
当前视图的名称。 -
Near Clip Distance:
0.009999999776482582
近裁剪距离。 -
Pitch:
0.45039814710617065
俯仰角。 -
Target Frame:
<Fixed Frame>
目标坐标系。 -
Value:
Orbit (rviz)
视图的值。 -
Yaw:
0.4703981876373291
偏航角。
-
-
Saved:
~
保存的视图配置,这里为空。
Window Geometry(窗口几何)
这部分定义了 RViz 窗口的布局和大小。
-
Displays:
-
collapsed:
false
显示面板是否折叠。
-
-
Height:
812
窗口的高度(像素)。 -
Hide Left Dock:
false
是否隐藏左侧停靠栏。 -
Hide Right Dock:
false
是否隐藏右侧停靠栏。 -
QMainWindow State:
主窗口的状态信息,通常用于保存窗口的布局和位置。 -
RvizVisualToolsGui:
-
collapsed:
false
可视化工具面板是否折叠。
-
-
Selection:
-
collapsed:
false
选择面板是否折叠。
-
-
Tool Properties:
-
collapsed:
false
工具属性面板是否折叠。
-
-
Trajectory - Trajectory Slider:
-
collapsed:
false
轨迹滑块面板是否折叠。
-
-
Views:
-
collapsed:
false
视图面板是否折叠。
-
-
Width:
1533
窗口的宽度(像素)。 -
X:
255
窗口在屏幕上的 X 坐标。 -
Y:
198
窗口在屏幕上的 Y 坐标。
相关文章:
的配置文件(moveitcpp))
RViz(机器人可视化工具)的配置文件(moveitcpp)
1. Panels(面板设置) 面板是RViz界面中的各个功能区域,用于显示和操作不同的数据。 Displays(显示面板) Class: rviz_common/Displays 指定面板的类型,这里是显示面板。 Help Height: 78 帮助区域的高度…...

Redis中6种缓存更新策略
Redis作为一款高性能的内存数据库,已经成为缓存层的首选解决方案。然而,使用缓存时最大的挑战在于保证缓存数据与底层数据源的一致性。缓存更新策略直接影响系统的性能、可靠性和数据一致性,选择合适的策略至关重要。 本文将介绍Redis中6种缓…...

如何使用极狐GitLab 软件包仓库功能托管 terraform?
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 Terraform 模块库 (BASIC ALL) 基础设施仓库和 Terraform 模块仓库合并到单个 Terraform 模块仓库功能引入于极狐GitLab 15.1…...
观测云:安全、可信赖的监控观测云服务
引言 近日,“TikTok 遭欧盟隐私监管机构调查并处以 5.3 亿欧元”一案,再次引发行业内对数据合规等话题的热议。据了解,仅 2023 年一年就产生了超过 20 亿美元的 GDPR 罚单。这凸显了在全球化背景下,企业在数据隐私保护方面所面临…...

【python】使用Python和BERT进行文本摘要:从数据预处理到模型训练与生成
《Python OpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门! 解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界 随着信息爆炸时代的到来,海量文本数据的高效处理与理解成为亟待解决的问题。文本摘要作为自然语言处理(NLP)中的关键任务,旨在自动生成…...
【PostgreSQL数据分析实战:从数据清洗到可视化全流程】5.3 相关性分析(PEARSON/SPEARMAN相关系数)
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 文章大纲 5.3 相关性分析(PEARSON/SPEARMAN相关系数)5.3.1 相关性分析理论基础5.3.1.1 相关系数定义与分类5.3.1.2 Pearson相关系数( Pearson Corr…...

Redis面试 实战贴 后面持续更新链接
redis是使用C语言写的。 面试问题列表: Redis支持哪些数据类型?各适用于什么场景? Redis为什么采用单线程模型?优势与瓶颈是什么? RDB和AOF持久化的区别?如何选择?混合持久化如何实现&#x…...
)
小程序滚动条隐藏(uniapp版本)
单独指定页面隐藏(找到对应的scroll-view) <style> /* 全局隐藏滚动条样式 */ ::-webkit-scrollbar { display: none; width: 0; height: 0; color: transparent; background: transparent; } /* 确保scroll-view组件也隐藏滚动条 */ …...
python基础:序列和索引-->Python的特殊属性
一.序列和索引 1.1 用索引检索字符串中的元素 # 正向递增 shelloworld for i in range (0,len(s)):# i是索引print(i,s[i],end\t\t) print(\n--------------------------) # 反向递减 for i in range (-10,0):print(i,s[i],end\t\t)print(\n--------------------------) print(…...
java反射(2)
package 反射;import java.lang.reflect.Constructor; import java.lang.reflect.Field; import java.lang.reflect.Method; import java.util.Arrays;public class demo {public static void main(String[] args) throws Exception {// 通过类的全限定名获取对应的 Class 对象…...

C++核心概念全解析:从析构函数到运算符重载的深度指南
目录 前言一、构析函数1.1 概念1.2 语法格式 1.3 核心特性1.4 调用时机1.5 构造函数 vs 析构函数1.6 代码示例 二、this关键字2.1 基本概念2.2 核心特性2.3 使用场景2.3.1 区分成员与局部变量2.3.2 返回对象自身(链式调用)2.3.3 成员函数间传递当前对象2…...

如何巧妙解决 Too many connections 报错?
1. 背景 在日常的 MySQL 运维中,难免会出现参数设置不合理,导致 MySQL 在使用过程中出现各种各样的问题。 今天,我们就来讲解一下 MySQL 运维中一种常见的问题:最大连接数设置不合理,一旦到了业务高峰期就会出现连接…...

自由学习记录(58)
Why you were able to complete the SpringBoot MyBatisPlus task smoothly: Clear logic flow: Database → Entity → Service → Controller → API → JSON response. Errors are explicit, results are verifiable — you know what’s broken and what’s fixed. Sta…...

ES6 知识点整理
一、变量声明:var、let、const 的区别 作用域 var:函数作用域(函数内有效)。let/const:块级作用域({} 内有效,如 if、for)。 变量提升 var 会提升变量到作用域顶部(值为…...
《MATLAB实战训练营:从入门到工业级应用》高阶挑战篇-《5G通信速成:MATLAB毫米波信道建模仿真指南》
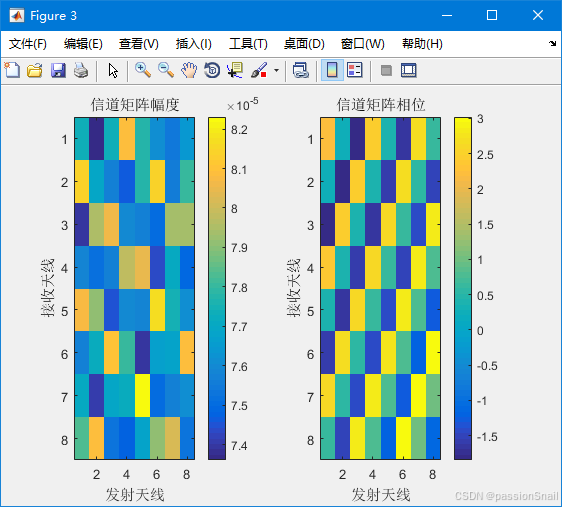
《MATLAB实战训练营:从入门到工业级应用》高阶挑战篇-5G通信速成:MATLAB毫米波信道建模仿真指南 🚀📡 大家好!今天我将带大家进入5G通信的奇妙世界,我们一起探索5G通信中最激动人心的部分之一——毫米波信…...
工程师 - 汽车分类
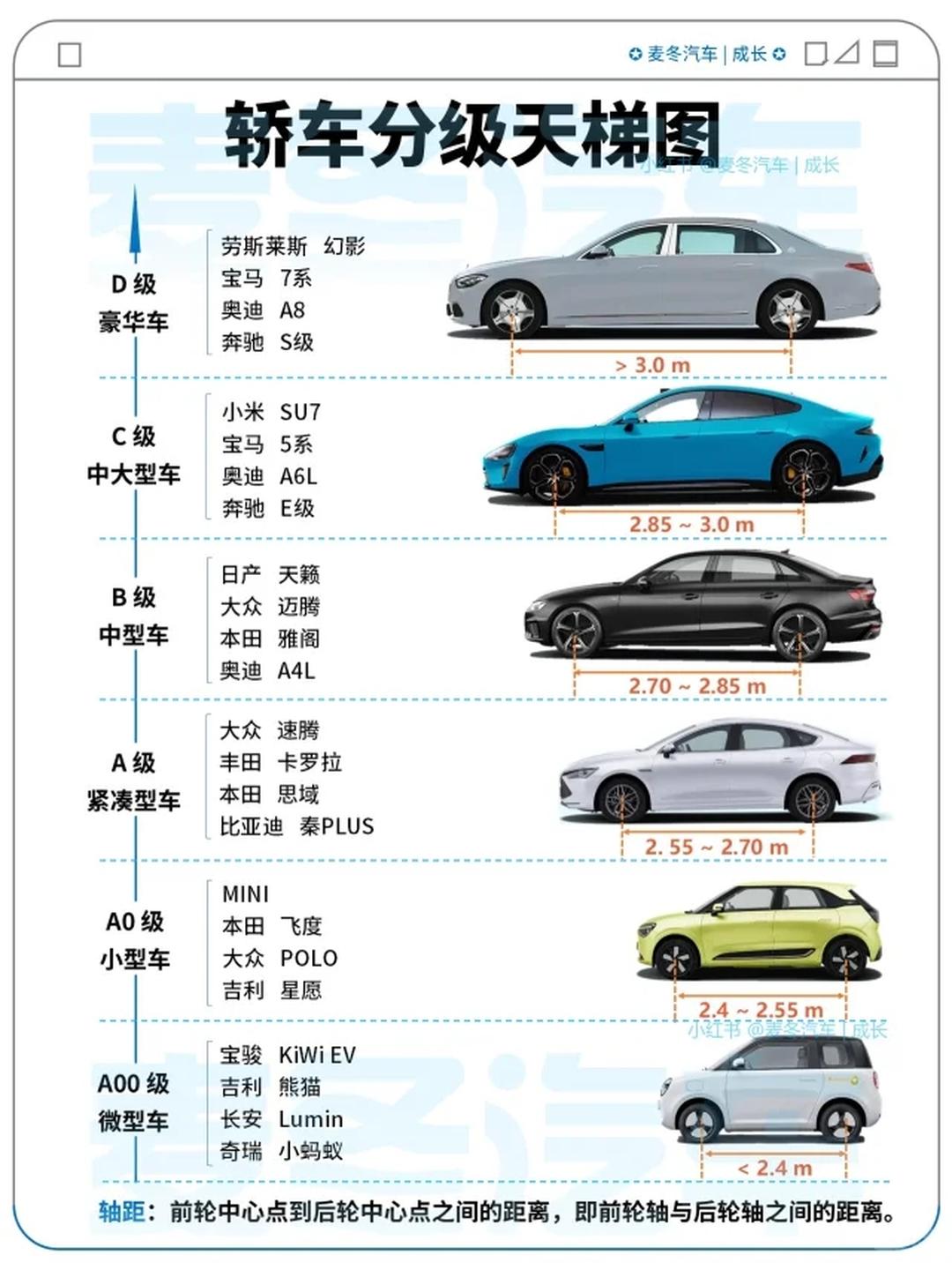
欧洲和中国按字母对汽车分类: **轴距**:简单来说,就是前轮中心点到后轮中心点之间的距离,也就是前轮轴和后轮轴之间的长度。根据轴距的大小,国际上通常把轿车分为以下几类(德国大众汽车习惯用A\B\C\D分类&a…...
57.[前端开发-前端工程化]Day04-webpack插件模式-搭建本地服务器
Webpack常见的插件和模式 1 认识插件Plugin 认识Plugin 2 CleanWebpackPlugin CleanWebpackPlugin 3 HtmlWebpackPlugin HtmlWebpackPlugin 生成index.html分析 自定义HTML模板 自定义模板数据填充 4 DefinePlugin DefinePlugin的介绍 DefinePlugin的使用 5 mode模式配置…...

K8S - 金丝雀发布实战 - Argo Rollouts 流量控制解析
一、金丝雀发布概述 1.1 什么是金丝雀发布? 金丝雀发布(Canary Release)是一种渐进式部署策略,通过逐步将生产流量从旧版本迁移至新版本,结合实时指标验证,在最小化风险的前提下完成版本迭代。其核心逻辑…...
Qt中数据结构使用自定义类————附带详细示例
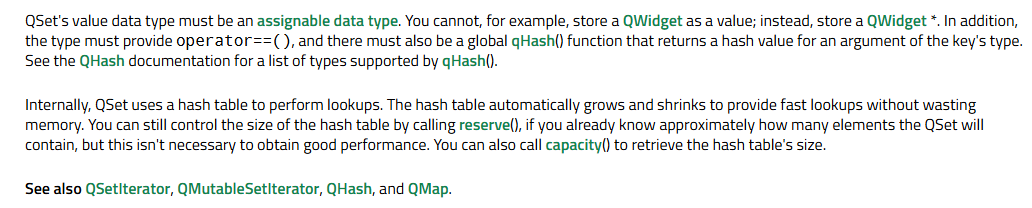
文章目录 C对数据结构使用自定义类1 QMap使用自定义类1.1 使用自定义类做key1.2 使用自定义类做value 2 QSet使用自定义类 参考 C对数据结构使用自定义类 1 QMap使用自定义类 1.1 使用自定义类做key QMap<key,value>中数据存入时会对存入key值的数据进行比较ÿ…...
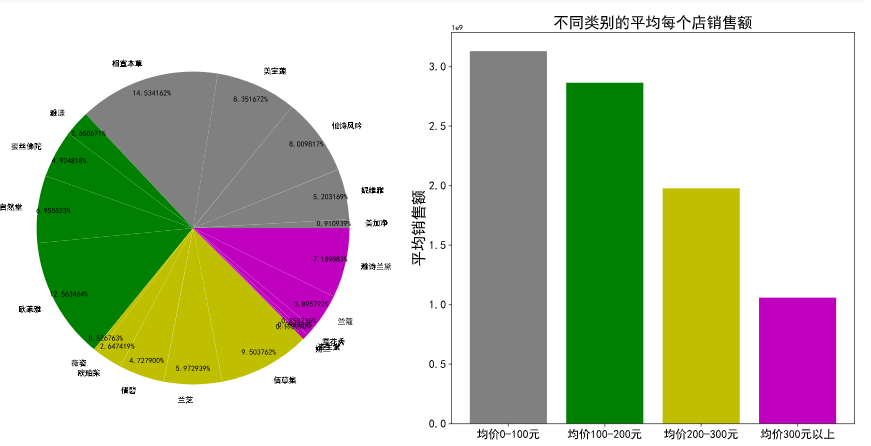
数据可视化与分析
数据可视化的目的是为了数据分析,而非仅仅是数据的图形化展示。 项目介绍 项目案例为电商双11美妆数据分析,分析品牌销售量、性价比等。 数据集包括更新日期、ID、title、品牌名、克数容量、价格、销售数量、评论数量、店名等信息。 1、数据初步了解…...

基于大模型预测的产钳助产分娩全方位研究报告
目录 一、引言 1.1 研究背景与意义 1.2 研究目的与方法 二、产钳助产分娩概述 2.1 产钳助产定义与历史 2.2 适用情况与临床意义 三、大模型预测原理与数据基础 3.1 大模型技术原理 3.2 数据收集与处理 3.3 模型训练与验证 四、术前预测与准备 4.1 大模型术前风险预…...

通过混合机器学习和 TOPSIS 实现智能手机身份验证的稳健行为生物识别框架
1. 简介 随着日常工作、个人生活和金融操作对智能手机的依赖性不断增强,对弹性安全身份验证系统的需求也日益增长。尽管 PIN 码、密码和静态生物识别等传统身份验证方法仍可为系统提供一定的安全级别,但事实证明,它们容易受到多种威胁,包括敏感数据泄露、网络钓鱼、盗窃和…...

旅游设备生产企业的痛点 质检系统在旅游设备生产企业的应用
在旅游设备制造行业,产品质量直接关系到用户体验与企业口碑。从景区缆车、观光车到水上娱乐设施,每一件设备的安全性与可靠性都需经过严苛检测。然而,传统质检模式常面临数据分散、流程不透明、合规风险高等痛点,难以满足旅游设备…...

使用ESPHome烧录固件到ESP32-C3并接入HomeAssistant
文章目录 一、安装ESPHome二、配置ESP32-C3控制灯1.主配置文件esp32c3-luat.yaml2.基础通用配置base.yaml3.密码文件secret.yaml4.围栏灯four_light.yaml5.彩灯rgb_light.yaml6.左右柱灯left_right_light.yaml 三、安装固件四、HomeAssistant配置ESPHome1.直接访问2.配置ESPHom…...
【漫话机器学习系列】237. TSS总平方和
深度理解 TSS(总平方和):公式、意义与应用 在机器学习与统计建模领域,评价模型好坏的重要指标之一就是方差与误差分析。其中,TSS(Total Sum of Squares,总平方和)扮演着非常关键的角…...
DeepSeek多尺度数据:无监督与原则性诊断方案全解析
DeepSeek 多尺度数据诊断方案的重要性 在当今的 IT 领域,数据如同石油,是驱动各类智能应用发展的核心资源。随着技术的飞速发展,数据的规模和复杂性呈爆炸式增长,多尺度数据处理成为了众多领域面临的关键挑战。以计算机视觉为例,在目标检测任务中,小目标可能只有几个像素…...

Spring Framework 6:虚拟线程支持与性能增强
文章目录 引言一、虚拟线程支持:并发模型的革命二、AOT编译与原生镜像优化三、响应式编程与可观测性增强四、HTTP接口客户端与声明式HTTP五、性能比较与实际应用总结 引言 Spring Framework 6作为Spring生态系统的基础框架,随着Java 21的正式发布&#…...

用Redisson实现库存扣减的方法
Redisson是一个在Redis基础上实现的Java客户端,提供了许多高级功能,包括分布式锁、计数器、集合等。使用Redisson实现库存扣减可以保证操作的原子性和高效性。本文将详细介绍如何使用Redisson实现一个简单的库存扣减功能。 一、初始化Redisson客户端 首…...

视频转GIF
视频转GIF 以下是一个使用 Python 将视频转换为 GIF 的脚本,使用了 imageio 和 opencv-python 库: import cv2 import imageio import numpy as np """将视频转换为GIF图参数:video_path -- 输入视频的路径gif_path -- 输出GIF的路径fp…...

一场静悄悄的革命:AI大模型如何重构中国产业版图?
一场静悄悄的革命:AI大模型如何重构中国产业版图? 当ChatGPT在2022年掀起全球AI热潮时,很少有人意识到,这场技术变革正在中国产业界掀起更深层次的革命。在浙江宁波,一个纺织企业老板打开"产业链智能创新平台",30秒内就获得了原料采购、设备升级、海外拓客的全…...