rt-thread+STM32H7移植lwip出现问题解决方法
问题一:ping不通,或有丢帧情况。
问题二:不开启优化一切正常,keil开启优化后就无法联网。
问题三:网络断断续续。
解决方法:
主要是mpu配置和drv_eth驱动的问题,我的配置如下:
mpu:
/** Copyright (c) 2006-2021, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2019-04-14 whj4674672 first version*/
#include <rtthread.h>
#include "stm32h7xx.h"int mpu_init(void)
{MPU_Region_InitTypeDef MPU_InitStruct;/* Disable the MPU */HAL_MPU_Disable();/* Configure the MPU attributes as WT for AXI SRAM */MPU_InitStruct.Enable = MPU_REGION_ENABLE;MPU_InitStruct.BaseAddress = 0x24000000;MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;MPU_InitStruct.Number = MPU_REGION_NUMBER0;MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;MPU_InitStruct.SubRegionDisable = 0X00;MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;HAL_MPU_ConfigRegion(&MPU_InitStruct);#ifdef BSP_USING_SDRAM/* Configure the MPU attributes as WT for SDRAM */MPU_InitStruct.Enable = MPU_REGION_ENABLE;MPU_InitStruct.BaseAddress = 0xC0000000;MPU_InitStruct.Size = MPU_REGION_SIZE_32MB;MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;MPU_InitStruct.Number = MPU_REGION_NUMBER1;MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;MPU_InitStruct.SubRegionDisable = 0x00;MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;HAL_MPU_ConfigRegion(&MPU_InitStruct);
#endif#ifdef BSP_USING_ETH/* Configure the MPU attributes as Device not cacheable for ETH DMA descriptors and RX Buffers*/MPU_InitStruct.Enable = MPU_REGION_ENABLE;MPU_InitStruct.BaseAddress = 0x30040000;MPU_InitStruct.Size = MPU_REGION_SIZE_256B;MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;MPU_InitStruct.Number = MPU_REGION_NUMBER2;MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;MPU_InitStruct.SubRegionDisable = 0x00;MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;HAL_MPU_ConfigRegion(&MPU_InitStruct);MPU_InitStruct.Enable = MPU_REGION_ENABLE;MPU_InitStruct.BaseAddress = 0x30044000;MPU_InitStruct.Size = MPU_REGION_SIZE_16KB;MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;MPU_InitStruct.Number = MPU_REGION_NUMBER3;MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;MPU_InitStruct.SubRegionDisable = 0x00;MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;HAL_MPU_ConfigRegion(&MPU_InitStruct);
#endif/* Enable the MPU */HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);/* Enable CACHE */SCB_EnableICache();SCB_EnableDCache();return 0;}
INIT_BOARD_EXPORT(mpu_init);drv_eth.c
/** Copyright (c) 2006-2018, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2018-11-19 SummerGift first version* 2018-12-25 zylx fix some bugs* 2019-06-10 SummerGift optimize PHY state detection process* 2019-09-03 xiaofan optimize link change detection process* 2020-07-17 wanghaijing support h7* 2020-11-30 wanghaijing add phy reset*/#include<rtthread.h>
#include<rtdevice.h>
#include "board.h"
#include "drv_config.h"
#include <string.h>#ifdef BSP_USING_ETH#include <netif/ethernetif.h>
#include "lwipopts.h"
#include "drv_eth.h"/*
* Emac driver uses CubeMX tool to generate emac and phy's configuration,
* the configuration files can be found in CubeMX_Config folder.
*//* debug option */
//#define ETH_RX_DUMP
//#define ETH_TX_DUMP
//#define DRV_DEBUG
#define LOG_TAG "drv.emac"
#include <drv_log.h>#define MAX_ADDR_LEN 6struct rt_stm32_eth
{/* inherit from ethernet device */struct eth_device parent;
#ifndef PHY_USING_INTERRUPT_MODErt_timer_t poll_link_timer;
#endif/* interface address info, hw address */rt_uint8_t dev_addr[MAX_ADDR_LEN];/* ETH_Speed */uint32_t ETH_Speed;/* ETH_Duplex_Mode */uint32_t ETH_Mode;
};static ETH_HandleTypeDef EthHandle;
static ETH_TxPacketConfig TxConfig;
static struct rt_stm32_eth stm32_eth_device;
static uint8_t PHY_ADDR = 0x1F;
static rt_uint32_t reset_pin = -1;#if defined ( __ICCARM__ ) /*!< IAR Compiler */
#pragma location=0x30040000
ETH_DMADescTypeDef DMARxDscrTab[ETH_RX_DESC_CNT]; /* Ethernet Rx DMA Descriptors */
#pragma location=0x30040060
ETH_DMADescTypeDef DMATxDscrTab[ETH_TX_DESC_CNT]; /* Ethernet Tx DMA Descriptors */
#pragma location=0x30040200
uint8_t Rx_Buff[ETH_RX_DESC_CNT][ETH_MAX_PACKET_SIZE]; /* Ethernet Receive Buffers */#elif defined ( __CC_ARM ) /* MDK ARM Compiler */
__attribute__((at(0x30040000))) ETH_DMADescTypeDef DMARxDscrTab[ETH_RX_DESC_CNT]; /* Ethernet Rx DMA Descriptors */
__attribute__((at(0x30040060))) ETH_DMADescTypeDef DMATxDscrTab[ETH_TX_DESC_CNT]; /* Ethernet Tx DMA Descriptors */
__attribute__((at(0x30040200))) uint8_t Rx_Buff[ETH_RX_DESC_CNT][ETH_MAX_PACKET_SIZE]; /* Ethernet Receive Buffer */#elif defined ( __GNUC__ ) /* GNU Compiler */
ETH_DMADescTypeDef DMARxDscrTab[ETH_RX_DESC_CNT] __attribute__((section(".ARM.__at_0x30040000"))); /* Ethernet Rx DMA Descriptors */
ETH_DMADescTypeDef DMATxDscrTab[ETH_TX_DESC_CNT] __attribute__((section(".ARM.__at_0x30040060"))); /* Ethernet Tx DMA Descriptors */
uint8_t Rx_Buff[ETH_RX_DESC_CNT][ETH_MAX_PACKET_SIZE] __attribute__((section(".ARM.__at_0x30040200"))); /* Ethernet Receive Buffers */
#endif#if defined(ETH_RX_DUMP) || defined(ETH_TX_DUMP)
#define __is_print(ch) ((unsigned int)((ch) - ' ') < 127u - ' ')
static void dump_hex(const rt_uint8_t *ptr, rt_size_t buflen)
{unsigned char *buf = (unsigned char *)ptr;int i, j;for (i = 0; i < buflen; i += 16){rt_kprintf("%08X: ", i);for (j = 0; j < 16; j++)if (i + j < buflen)rt_kprintf("%02X ", buf[i + j]);elsert_kprintf(" ");rt_kprintf(" ");for (j = 0; j < 16; j++)if (i + j < buflen)rt_kprintf("%c", __is_print(buf[i + j]) ? buf[i + j] : '.');rt_kprintf("\n");}
}
#endifstatic void phy_reset(void)
{rt_pin_write(reset_pin, PIN_LOW);rt_thread_mdelay(50);rt_pin_write(reset_pin, PIN_HIGH);
}HAL_StatusTypeDef LAN8720_Init(ETH_HandleTypeDef *heth)
{uint32_t phyreg = 0;uint32_t TIME_Out = 0;//软件复位LAN8720Aif(HAL_ETH_WritePHYRegister(heth, PHY_BASIC_CONTROL_REG, 0x00, 0x8000) != HAL_OK){return HAL_ERROR;}//等待LAN8720A复位完成HAL_Delay(0x00000F);if((HAL_ETH_WritePHYRegister(heth, PHY_BASIC_CONTROL_REG, 0x00, 0x1000)) != HAL_OK){return HAL_ERROR; } //等待LAN8720A写入完成HAL_Delay(0xF);do{ HAL_ETH_ReadPHYRegister(heth, PHY_BASIC_CONTROL_REG, 0x01, &phyreg);TIME_Out++;if(TIME_Out > 0x0000FFFF) return HAL_TIMEOUT;} while (((phyreg & 0x0020) != 0x0020));return HAL_OK;
}
/* EMAC initialization function */
static rt_err_t rt_stm32_eth_init(rt_device_t dev)
{ETH_MACConfigTypeDef MACConf;uint32_t regvalue = 0;uint8_t status = RT_EOK;__HAL_RCC_D2SRAM3_CLK_ENABLE();// phy_reset();/* ETHERNET Configuration */EthHandle.Instance = ETH;EthHandle.Init.MACAddr = (rt_uint8_t *)&stm32_eth_device.dev_addr[0];EthHandle.Init.MediaInterface = HAL_ETH_RMII_MODE;EthHandle.Init.TxDesc = DMATxDscrTab;EthHandle.Init.RxDesc = DMARxDscrTab;EthHandle.Init.RxBuffLen = ETH_MAX_PACKET_SIZE;SCB_InvalidateDCache();HAL_ETH_DeInit(&EthHandle);/* configure ethernet peripheral (GPIOs, clocks, MAC, DMA) */if (HAL_ETH_Init(&EthHandle) != HAL_OK){LOG_E("eth hardware init failed");}else{LOG_D("eth hardware init success");}rt_memset(&TxConfig, 0, sizeof(ETH_TxPacketConfig));TxConfig.Attributes = ETH_TX_PACKETS_FEATURES_CSUM | ETH_TX_PACKETS_FEATURES_CRCPAD;TxConfig.ChecksumCtrl = ETH_CHECKSUM_IPHDR_PAYLOAD_INSERT_PHDR_CALC;TxConfig.CRCPadCtrl = ETH_CRC_PAD_INSERT;for (int idx = 0; idx < ETH_RX_DESC_CNT; idx++){HAL_ETH_DescAssignMemory(&EthHandle, idx, &Rx_Buff[idx][0], NULL);}HAL_ETH_SetMDIOClockRange(&EthHandle);LAN8720_Init(&EthHandle);rt_thread_delay(200);for(int i = 0; i <= PHY_ADDR; i ++){if(HAL_ETH_ReadPHYRegister(&EthHandle, i, PHY_SPECIAL_MODES_REG, ®value) != HAL_OK){status = RT_ERROR;/* Can't read from this device address continue with next address */continue;}if((regvalue & PHY_BASIC_STATUS_REG) == i){PHY_ADDR = i;status = RT_EOK;LOG_D("Found a phy, address:0x%02X", PHY_ADDR);break;}}if(HAL_ETH_WritePHYRegister(&EthHandle, PHY_ADDR, PHY_BASIC_CONTROL_REG, PHY_RESET_MASK) == HAL_OK){HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ADDR, PHY_SPECIAL_MODES_REG, ®value);uint32_t tickstart = rt_tick_get();/* wait until software reset is done or timeout occured */while(regvalue & PHY_RESET_MASK){if((rt_tick_get() - tickstart) <= 500){if(HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ADDR, PHY_BASIC_CONTROL_REG, ®value) != HAL_OK){status = RT_ERROR;break;}}else{status = RT_ETIMEOUT;}}}rt_thread_delay(2000);if(HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ADDR, PHY_BASIC_CONTROL_REG, ®value) == HAL_OK){regvalue |= PHY_AUTO_NEGOTIATION_MASK;HAL_ETH_WritePHYRegister(&EthHandle, PHY_ADDR, PHY_BASIC_CONTROL_REG, regvalue);eth_device_linkchange(&stm32_eth_device.parent, RT_TRUE);HAL_ETH_GetMACConfig(&EthHandle, &MACConf);MACConf.DuplexMode = ETH_FULLDUPLEX_MODE;MACConf.Speed = ETH_SPEED_100M;HAL_ETH_SetMACConfig(&EthHandle, &MACConf);HAL_ETH_Start_IT(&EthHandle);}else{status = RT_ERROR;}return status;
}static rt_err_t rt_stm32_eth_open(rt_device_t dev, rt_uint16_t oflag)
{LOG_D("emac open");return RT_EOK;
}static rt_err_t rt_stm32_eth_close(rt_device_t dev)
{LOG_D("emac close");return RT_EOK;
}static rt_ssize_t rt_stm32_eth_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size)
{LOG_D("emac read");rt_set_errno(-RT_ENOSYS);return 0;
}static rt_ssize_t rt_stm32_eth_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size)
{LOG_D("emac write");rt_set_errno(-RT_ENOSYS);return 0;
}static rt_err_t rt_stm32_eth_control(rt_device_t dev, int cmd, void *args)
{switch (cmd){case NIOCTL_GADDR:/* get mac address */if (args) rt_memcpy(args, stm32_eth_device.dev_addr, 6);else return -RT_ERROR;break;default :break;}return RT_EOK;
}/* ethernet device interface */
/* transmit data*/
rt_err_t rt_stm32_eth_tx(rt_device_t dev, struct pbuf *p)
{rt_err_t ret = RT_ERROR;HAL_StatusTypeDef state;uint32_t i = 0, framelen = 0;struct pbuf *q;ETH_BufferTypeDef Txbuffer[ETH_TX_DESC_CNT];rt_memset(Txbuffer, 0, ETH_TX_DESC_CNT * sizeof(ETH_BufferTypeDef));for (q = p; q != NULL; q = q->next){if (i >= ETH_TX_DESC_CNT)return ERR_IF;Txbuffer[i].buffer = q->payload;Txbuffer[i].len = q->len;framelen += q->len;if (i > 0){Txbuffer[i - 1].next = &Txbuffer[i];}if (q->next == NULL){Txbuffer[i].next = NULL;}i++;}TxConfig.Length = framelen;TxConfig.TxBuffer = Txbuffer;#ifdef ETH_TX_DUMPrt_kprintf("Tx dump, len= %d\r\n", framelen);dump_hex(Txbuffer[0].buffer,framelen);
#endifif (stm32_eth_device.parent.link_status){SCB_CleanInvalidateDCache();state = HAL_ETH_Transmit(&EthHandle, &TxConfig, 1000);if (state != HAL_OK){LOG_W("eth transmit frame faild: %d", EthHandle.ErrorCode);EthHandle.ErrorCode = HAL_ETH_STATE_READY;EthHandle.gState = HAL_ETH_STATE_READY;}}else{LOG_E("eth transmit frame faild, netif not up");}ret = ERR_OK;return ret;
}/* receive data*/
struct pbuf *rt_stm32_eth_rx(rt_device_t dev)
{uint32_t framelength = 0;rt_uint16_t l;struct pbuf *p = RT_NULL, *q;ETH_BufferTypeDef RxBuff;uint32_t alignedAddr;if(HAL_ETH_GetRxDataBuffer(&EthHandle, &RxBuff) == HAL_OK){HAL_ETH_GetRxDataLength(&EthHandle, &framelength);/* Build Rx descriptor to be ready for next data reception */HAL_ETH_BuildRxDescriptors(&EthHandle);/* Invalidate data cache for ETH Rx Buffers */alignedAddr = (uint32_t)RxBuff.buffer & ~0x1F;SCB_InvalidateDCache_by_Addr((uint32_t *)alignedAddr, (uint32_t)RxBuff.buffer - alignedAddr + framelength);p = pbuf_alloc(PBUF_RAW, framelength, PBUF_RAM);if (p != NULL){for (q = p, l = 0; q != NULL; q = q->next){memcpy((rt_uint8_t *)q->payload, (rt_uint8_t *)&RxBuff.buffer[l], q->len);l = l + q->len;}}}return p;
}/* interrupt service routine */
void ETH_IRQHandler(void)
{/* enter interrupt */rt_interrupt_enter();HAL_ETH_IRQHandler(&EthHandle);/* leave interrupt */rt_interrupt_leave();
}void HAL_ETH_RxCpltCallback(ETH_HandleTypeDef *heth)
{rt_err_t result;result = eth_device_ready(&(stm32_eth_device.parent));if (result != RT_EOK)LOG_I("RxCpltCallback err = %d", result);
}void HAL_ETH_ErrorCallback(ETH_HandleTypeDef *heth)
{LOG_E("eth err");
}enum {PHY_LINK = (1 << 0),PHY_100M = (1 << 1),PHY_FULL_DUPLEX = (1 << 2),
};static void phy_linkchange()
{static rt_uint8_t phy_speed = 0;rt_uint8_t phy_speed_new = 0;rt_uint32_t status;HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ADDR, PHY_BASIC_STATUS_REG, (uint32_t *)&status);LOG_D("phy basic status reg is 0x%X", status);if (status & (PHY_AUTONEGO_COMPLETE_MASK | PHY_LINKED_STATUS_MASK)){rt_uint32_t SR = 0;phy_speed_new |= PHY_LINK;HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ADDR, PHY_Status_REG, (uint32_t *)&SR);LOG_D("phy control status reg is 0x%X", SR);if (PHY_Status_SPEED_100M(SR)){phy_speed_new |= PHY_100M;}if (PHY_Status_FULL_DUPLEX(SR)){phy_speed_new |= PHY_FULL_DUPLEX;}}if (phy_speed != phy_speed_new){phy_speed = phy_speed_new;if (phy_speed & PHY_LINK){LOG_D("link up");if (phy_speed & PHY_100M){LOG_D("100Mbps");stm32_eth_device.ETH_Speed = ETH_SPEED_100M;}else{stm32_eth_device.ETH_Speed = ETH_SPEED_10M;LOG_D("10Mbps");}if (phy_speed & PHY_FULL_DUPLEX){LOG_D("full-duplex");stm32_eth_device.ETH_Mode = ETH_FULLDUPLEX_MODE;}else{LOG_D("half-duplex");stm32_eth_device.ETH_Mode = ETH_HALFDUPLEX_MODE;}/* send link up. */eth_device_linkchange(&stm32_eth_device.parent, RT_TRUE);}else{LOG_I("link down");eth_device_linkchange(&stm32_eth_device.parent, RT_FALSE);}}
}#ifdef PHY_USING_INTERRUPT_MODE
static void eth_phy_isr(void *args)
{rt_uint32_t status = 0;HAL_ETH_ReadPHYRegister(&EthHandle, PHY_ADDR, PHY_INTERRUPT_FLAG_REG, (uint32_t *)&status);LOG_D("phy interrupt status reg is 0x%X", status);phy_linkchange();
}
#endif /* PHY_USING_INTERRUPT_MODE */static void phy_monitor_thread_entry(void *parameter)
{phy_linkchange();
#ifdef PHY_USING_INTERRUPT_MODE/* configuration intterrupt pin */rt_pin_mode(PHY_INT_PIN, PIN_MODE_INPUT_PULLUP);rt_pin_attach_irq(PHY_INT_PIN, PIN_IRQ_MODE_FALLING, eth_phy_isr, (void *)"callbackargs");rt_pin_irq_enable(PHY_INT_PIN, PIN_IRQ_ENABLE);/* enable phy interrupt */HAL_ETH_WritePHYRegister(&EthHandle, PHY_ADDR, PHY_INTERRUPT_MASK_REG, PHY_INT_MASK);
#if defined(PHY_INTERRUPT_CTRL_REG)HAL_ETH_WritePHYRegister(&EthHandle, PHY_ADDR, PHY_INTERRUPT_CTRL_REG, PHY_INTERRUPT_EN);
#endif
#else /* PHY_USING_INTERRUPT_MODE */stm32_eth_device.poll_link_timer = rt_timer_create("phylnk", (void (*)(void*))phy_linkchange,NULL, RT_TICK_PER_SECOND, RT_TIMER_FLAG_PERIODIC);if (!stm32_eth_device.poll_link_timer || rt_timer_start(stm32_eth_device.poll_link_timer) != RT_EOK){LOG_E("Start link change detection timer failed");}
#endif /* PHY_USING_INTERRUPT_MODE */
}/* Register the EMAC device */
static int rt_hw_stm32_eth_init(void)
{rt_err_t state = RT_EOK;rt_pin_mode(reset_pin, PIN_MODE_OUTPUT);rt_pin_write(reset_pin, PIN_HIGH);stm32_eth_device.ETH_Speed = ETH_SPEED_100M;stm32_eth_device.ETH_Mode = ETH_FULLDUPLEX_MODE;/* OUI 00-80-E1 STMICROELECTRONICS. */stm32_eth_device.dev_addr[0] = 0x00;stm32_eth_device.dev_addr[1] = 0x80;stm32_eth_device.dev_addr[2] = 0xE1;/* generate MAC addr from 96bit unique ID (only for test). */stm32_eth_device.dev_addr[3] = *(rt_uint8_t *)(UID_BASE + 4);stm32_eth_device.dev_addr[4] = *(rt_uint8_t *)(UID_BASE + 2);stm32_eth_device.dev_addr[5] = *(rt_uint8_t *)(UID_BASE + 0);stm32_eth_device.parent.parent.init = rt_stm32_eth_init;stm32_eth_device.parent.parent.open = rt_stm32_eth_open;stm32_eth_device.parent.parent.close = rt_stm32_eth_close;stm32_eth_device.parent.parent.read = rt_stm32_eth_read;stm32_eth_device.parent.parent.write = rt_stm32_eth_write;stm32_eth_device.parent.parent.control = rt_stm32_eth_control;stm32_eth_device.parent.parent.user_data = RT_NULL;stm32_eth_device.parent.eth_rx = rt_stm32_eth_rx;stm32_eth_device.parent.eth_tx = rt_stm32_eth_tx;/* register eth device */state = eth_device_init(&(stm32_eth_device.parent), "e0");if (RT_EOK == state){LOG_D("emac device init success");}else{LOG_E("emac device init faild: %d", state);state = -RT_ERROR;}/* start phy monitor */rt_thread_t tid;tid = rt_thread_create("phy",phy_monitor_thread_entry,RT_NULL,2048,2,2);if (tid != RT_NULL){rt_thread_startup(tid);}else{state = -RT_ERROR;}return state;
}
INIT_DEVICE_EXPORT(rt_hw_stm32_eth_init);#endif /* BSP_USING_ETH */我采用的是软件复位。
相关文章:

rt-thread+STM32H7移植lwip出现问题解决方法
问题一:ping不通,或有丢帧情况。 问题二:不开启优化一切正常,keil开启优化后就无法联网。 问题三:网络断断续续。 解决方法: 主要是mpu配置和drv_eth驱动的问题,我的配置如下: mpu&…...

Java Spring、Spring MVC、Spring Boot 和 Spring Cloud 的关系与区别
在 Java 开发领域,Spring、Spring MVC、Spring Boot 和 Spring Cloud 这些框架和技术名词频繁出现。对于初学者来说,理解它们之间的关系和区别可能有些困惑。本文将深入浅出地讲解这些概念,帮助你理清它们的联系与差异。 一、Spring 1.1 定义 Spring 是一个轻量级的 Java…...
服务器综合实验(实战详解)
该文章的目录部分 实验内容 实验完成步骤 虚拟机准备 配置两个虚拟机的本地仓库 虚拟机A: 虚拟机B: 配置SSH公钥互信 虚拟机A: 编辑 虚拟机B: 提供基于bind的DNS服务 虚拟机A: 项目需求1: …...

Milvus 向量数据库详解与实践指南
一、Milvus 核心介绍 1. 什么是 Milvus? Milvus 是一款开源、高性能、可扩展的向量数据库,专门为海量向量数据的存储、索引和检索而设计。它支持近似最近邻搜索(ANN),适用于图像检索、自然语言处理(NLP&am…...

react+ts中函数组件父子通信方式
1. 父组件通过 Props 向子组件传递数据 这是最常见也是最基本的父子组件通信方式。父组件通过 props 将数据或回调函数传递给子组件。 示例代码: // 子组件接收来自父组件的数据 interface ChildProps {message: string; }const ChildComponent: React.FC<Chi…...
VSCode-插件:codegeex:ai coding assistant / 清华智普 AI 插件
一、官网 https://codegeex.cn/ 二、vscode 安装插件 点击安装即可,无需复杂操作,国内软件,无需科学上网,非常友好 三、智能注释 输入 // 或者 空格---后边自动出现注释信息,,按下 Tab 键,进…...

SlideLoss与FocalLoss在YOLOv8分类损失中的应用及性能分析
文章目录 一、引言二、YOLOv8 损失函数概述三、SlideLoss 详解(一)SlideLoss 的原理(二)SlideLoss 的代码实现 四、FocalLoss 分类损失函数详解(一)FocalLoss 的原理(二)FocalLoss 的…...

【AI智能推荐系统】第七篇:跨领域推荐系统的技术突破与应用场景
第七篇:跨领域推荐系统的技术突破与应用场景 提示语:🔥 “打破数据孤岛,实现1+1>2的推荐效果!深度解析美团、亚马逊如何用跨领域推荐技术实现业务协同,知识迁移核心技术全公开!” 目录 跨领域推荐的商业价值跨领域推荐技术体系 2.1 基于共享表征的学习2.2 迁移学习…...
)
ui组件二次封装(vue)
组件二次封装的意义 保证一个系统中ui风格和功能的一致性便于维护 从属性、事件、插槽、ref这几方面考虑 属性和事件的处理:ui组件上绑定$attrs(v-model本质也是一个属性加一个事件,所以也在其列) 在自定义组件中打印$attrs&am…...
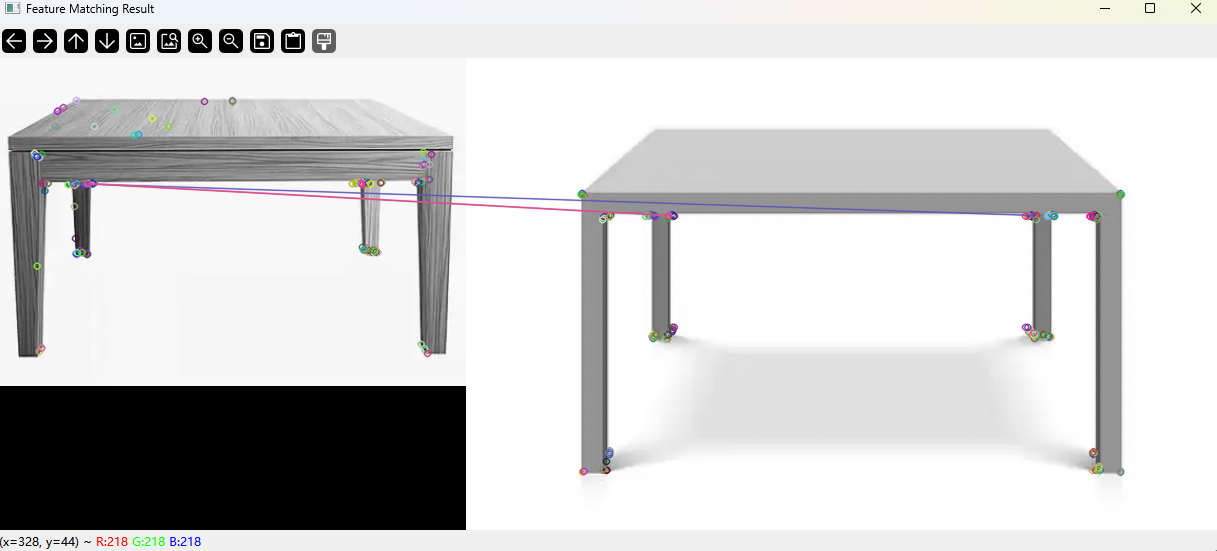
OpenCv实战笔记(4)基于opencv实现ORB特征匹配检测
一、原理作用 ORB 原理(Oriented FAST and Rotated BRIEF): 特征点检测:使用 FAST 算法检测角点(关键点)。 方向计算:为每个关键点分配主方向,增强旋转不变性。 特征描述:…...

PyTorch 线性回归模型构建与神经网络基础要点解析
笔记 1 PyTorch构建线性回归模型 1.1 创建数据集 import torch from torch.utils.data import TensorDataset # 创建x和y张量数据集对象 from torch.utils.data import DataLoader # 创建数据集加载器 import torch.nn as nn # 损失函数和回归函数 from torch.optim impo…...

Android平台FFmpeg音视频开发深度指南
一、FFmpeg在Android开发中的核心价值 FFmpeg作为业界领先的多媒体处理框架,在Android音视频开发中扮演着至关重要的角色。它提供了: 跨平台支持:统一的API处理各种音视频格式完整功能链:从解码、编码到滤镜处理的全套解决方案灵…...
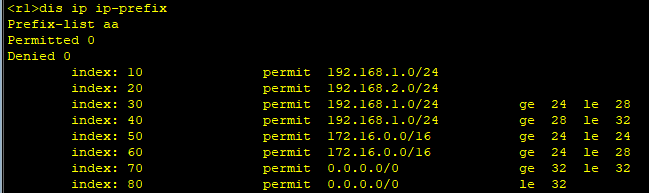
深入解析路由策略:从流量控制到策略实施
一、网络流量双平面解析 在路由策略的设计中,必须明确区分两个关键平面: 1. 控制层面(Control Plane) 定义:路由协议传递路由信息形成的逻辑平面(如OSPF的LSA、RIP的Response报文)…...
FHE 之 面向小白的引导(Bootstrapping)
1. 引言 FHE初学者和工程师常会讨论的一个问题是; “什么是引导(bootstrapping)?” 从理论角度看,这个问题的答案很简单: 引导就是套用 Gentry 提出的思想——在加密状态下同态地执行解密操作ÿ…...
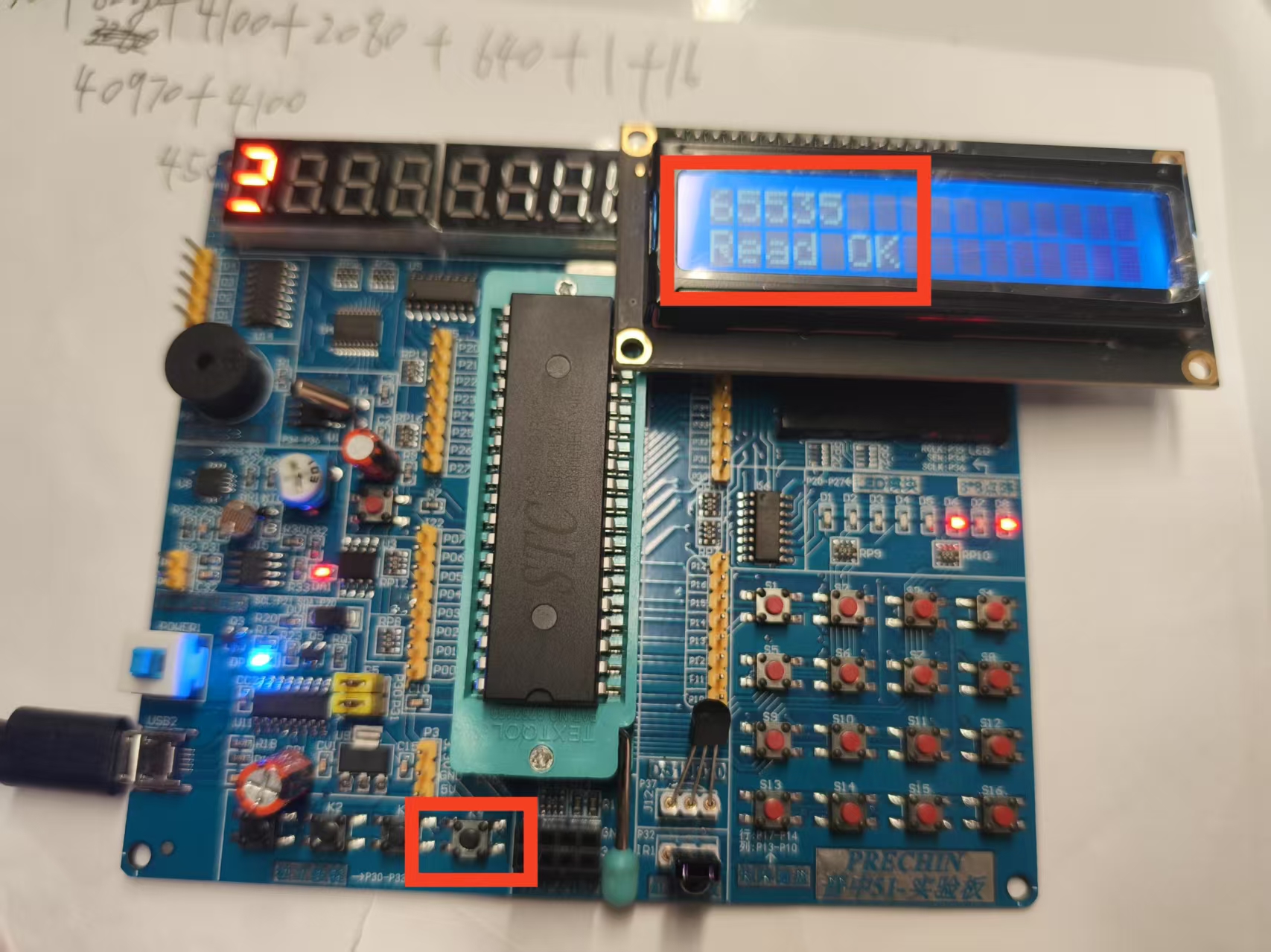
51单片机入门教程——AT24C02数据存储
前言 本教程基于B站江协科技课程进行个人学习整理,专为拥有C语言基础的零基础入门51单片机新手设计。既帮助解决因时间差导致的设备迭代调试难题,也助力新手快速掌握51单片机核心知识,实现从C语言理论到单片机实践应用的高效过渡 。 目录 …...
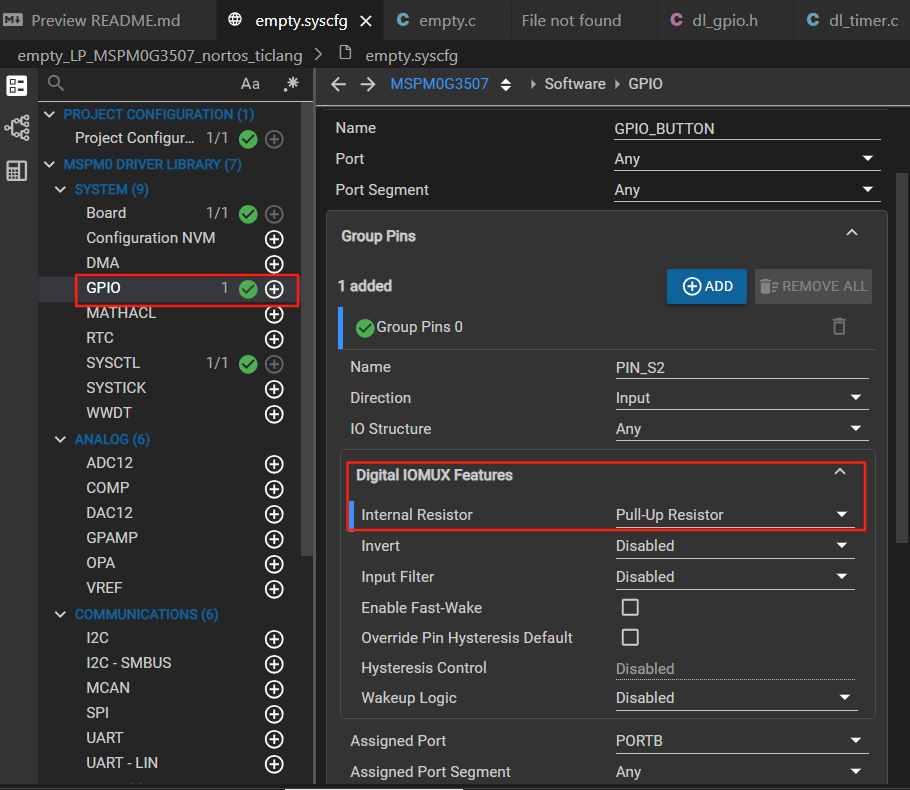
M0的基础篇之PWM学习
一、困惑 上一节课就是单纯的之配置了一个基础的定时器进行计数,计到一定的数值也就是到了一定的时间就进入中断,执行中断里面的任务,也就是一个最基础的定时的功能 这一节课的定时器产生了一个pwm波。也就是我们可以改变里面高电平的持续时间…...
Python----神经网络(基于AlexNet的猫狗分类项目)
一、基于AlexNet的猫狗分类 1.1、项目背景 猫和狗是我们生活中最常见的宠物,它们的图像数据大量存在于互联网上。对此进行分类不仅可以帮助开发自动化宠物识别应用,也可以应用于更广泛的计算机视觉领域。例如,训练良好的模型可以支持流浪动物…...

excel表数据导入数据库
前两天,有个两DB之间的数据导出导入的需求。对方提供的是excel表,我这边是mysql数据库,excel表第一行是字段名,之后的行是记录的值。 其实没有多复杂,我先将exel转成csv,结果mysql导入csv,第一行…...

SMT贴片钢网精密设计与制造要点解析
内容概要 SMT贴片钢网作为电子组装工艺的核心载体,其设计与制造质量直接影响焊膏印刷精度及产品良率。本文系统梳理了钢网全生命周期中的15项关键技术指标,从材料选择、结构设计到工艺控制构建完整技术框架。核心要点涵盖激光切割精度的微米级调控、开口…...

第三节:条件语句与循环:控制程序流程
📌 第三节:条件语句与循环:控制程序流程 目标:熟练运用条件判断、循环结构,实现动态逻辑与重复操作,掌握常见算法的底层实现。 一、条件语句:让程序“聪明”起来 1. if-else 基础语法 作用&am…...

荣耀A8互动娱乐组件部署实录(第1部分:服务端环境搭建)
作者:一位被“只支持安卓”的前端劝退过三次的技术人 前言 这一套组件我拆包已经不止一遍了,老实讲,不支持 iOS 是遗憾,但对于研究 UI 动态加载、资源分离结构和整体架构来说,A8 的这套服务还算完整,服务器…...

流式渲染 Streaming SSR
以下是关于流式渲染(Streaming SSR)的基本知识点总结: 一、流式渲染核心概念 1. 与传统SSR对比 维度传统SSR流式SSR响应方式完整HTML生成后一次性返回分块逐步返回HTML内容首字节时间较慢(需等待所有数据处理完成)极快(立即发送初始HTML结构)内存压力高(需缓存完整页面…...

基于Python Flask的深度学习电影评论情感分析可视化系统(2.0升级版,附源码)
博主介绍:✌IT徐师兄、7年大厂程序员经历。全网粉丝15W、csdn博客专家、掘金/华为云//InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇dz…...

如何减少极狐GitLab 容器镜像库存储?
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 减少容器镜像库存储 (BASIC ALL) 未清理的容器镜像库会随着时间的推移而变大。添加大量镜像或标签时: 获取可用标…...
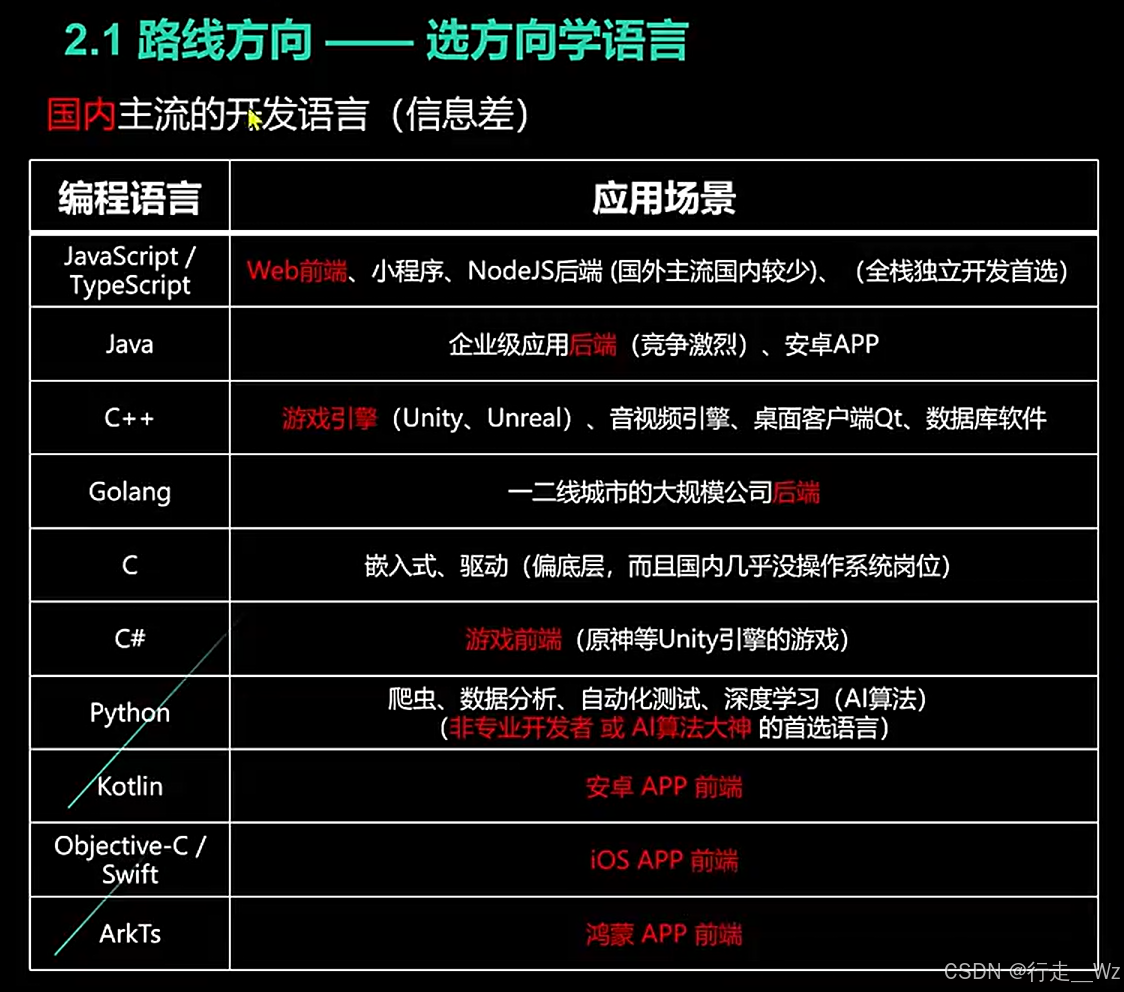
计算机学习路线与编程语言选择(信息差)
——授人以鱼不如授人以渔 计算机学习公式:1/3科班思维 1/3路线选择 1/3工程能力 好工作随便找(来自B站小毛毛熊) 本文主要是路线选择!!!下面开始吧。 面向岗位学习!到招聘网站看看有哪些…...

【redis】redis 手动切换主从
场景一: 测试需要,需要手动切换主从 在redis节点: $ redis-cli -h xx.xx.xx.xx -p XX -a XX shutdown 不要直接关闭redis进程,使用 shutdown ,能在进程关闭前持久化内存中的数据 待主从切换完毕后࿱…...

基于设备指纹识别的反爬虫技术:给设备办 “身份证”
传统的封禁 IP、验证码等反爬虫手段已逐渐失效,基于设备指纹识别的反爬虫技术应运而生,成为守护数据安全的新防线。它如同给每个设备办一张独一无二的 “身份证”,精准区分正常用户与爬虫工具。 一、基础参数采集:构建设备指纹的…...

SpringAI框架中的RAG知识库检索与增强生成模型详解
SpringAI框架中的RAG知识库检索与增强生成模型详解 一、RAG简介 RAG(Retrieval-Augmented Generation)可以通过检索知识库,克服大模型训练完成后参数冻结的局限性,携带知识让大模型根据知识进行回答。 二、SpringAI框架支持的R…...
,图解超赞超详细!!!)
【造包工具】【Xcap】精讲Xcap构造分片包(IPv4、ipv6、4G\5G等pcap均可),图解超赞超详细!!!
目录 前言 1. XCap工具概念介绍 2. Xcap环境说明 2.1 新建报文组 2.2 导入数据包 2.3 查看报文组 2.4 复制删除报文组 3. 构造分片包 3.1 造普通/外层分片步骤: 3.2 造内层分片步骤 3.2.1 建立一个新报文 3.2.2 将组装的新报文分片 3.2.3 替换原始包内层部分 3.2…...
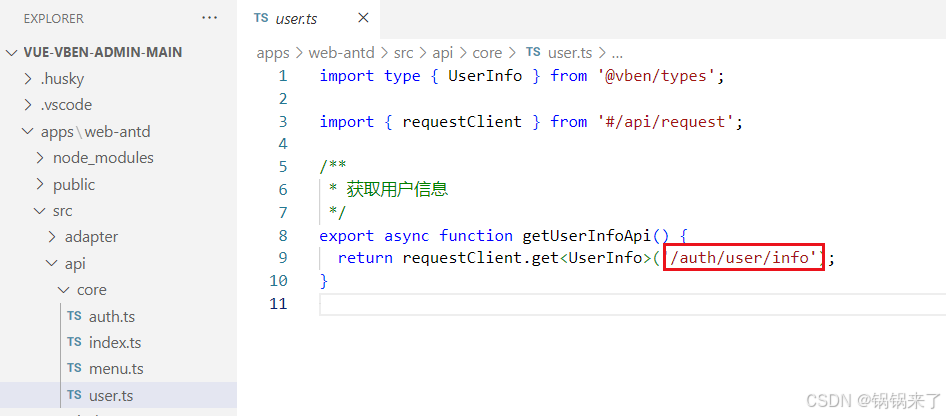
第三节:Vben Admin 最新 v5.0 对接后端登录接口(下)
文章目录 前言一、处理请求头Authorization二、/auth/user/info 接口前端接口后端接口三、/auth/codes 接口1.前端2.后端四、测试接口前言 上一节内容,实现了登录的/auth/login 接口,但是登陆没有完成,还需要完成下面两个接口。才能完成登录。 一、处理请求头Authorizatio…...