【机器人】复现 UniGoal 具身导航 | 通用零样本目标导航 CVPR 2025
UniGoal的提出了一个通用的零样本目标导航框架,能够统一处理多种类型的导航任务。
支持 对象类别导航、实例图像目标导航和文本目标导航,而无需针对特定任务进行训练或微调。
本文分享UniGoal复现和模型推理的过程~
查找沙发,模型会根据输入的实例图片进行匹配的

目录
1、创建Conda环境
2、 安装habitat仿真环境
3、安装第三方的依赖库
3.1 安装LightGlue依赖
3.2 安装detectron2依赖
3.3 安装Grounded-Segment-Anything依赖
3.4 安装其他依赖库
4、下载模型权重
5、下载HM3D数据集
6、安装Ollama,配置LLM 和 VLM
7、模型推理
1、创建Conda环境
首先创建一个Conda环境,名字为unigoal,python版本为3.8
进行unigoal环境
conda create -n unigoal python=3.8
conda activate unigoal然后下载unigoal代码,并解压:https://github.com/bagh2178/UniGoal
2、 安装habitat仿真环境
执行下面命令进行安装
cd UniGoal
conda install habitat-sim==0.2.3 -c conda-forge -c aihabitat
pip install -e third_party/habitat-lab安装过程的打印信息:
安装成功啦~
3、安装第三方的依赖库
3.1 安装LightGlue依赖
pip install git+https://github.com/cvg/LightGlue.git正常安装打印的信息:
3.2 安装detectron2依赖
需要cuda>=12.1的,用nvcc --version查询
(unigoal) lgp@lgp-MS-7E07:~/2025_project/UniGoal$ nvcc --version
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2023 NVIDIA Corporation
Built on Mon_Apr__3_17:16:06_PDT_2023
Cuda compilation tools, release 12.1, V12.1.105
Build cuda_12.1.r12.1/compiler.32688072_0
如果是cuda11.x或更底版本的,需要安装或切换为cuda>=12.1的
将以下内容添加到 ~/.bashrc
# 设置 CUDA 12.1 为默认版本
export CUDA_HOME=/usr/local/cuda-12.1
export PATH=/usr/local/cuda-12.1/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-12.1/lib64:$LD_LIBRARY_PATH然后执行:
source ~/.bashrc再安装detectron2:
pip install git+https://github.com/facebookresearch/detectron2.git
3.3 安装Grounded-Segment-Anything依赖
执行命令进行安装,等待安装完成~
git clone https://github.com/IDEA-Research/Grounded-Segment-Anything.git third_party/Grounded-Segment-Anything
cd third_party/Grounded-Segment-Anything
git checkout 5cb813f
pip install -e segment_anything
pip install --no-build-isolation -e GroundingDINO3.4 安装其他依赖库
先安装pytorch::faiss-gpu,等待安装完成~
conda install pytorch::faiss-gpu再安装安装其他依赖库
pip install -r requirements.txt2025/5/12 补丁安装:
pip install openai mkl faiss-gpu4、下载模型权重
分别下载sam_vit_h_4b8939.pth和groundingdino_swint_ogc.pth权重,放在data/models目录下
cd ../../
mkdir -p data/models
wget -O data/models/sam_vit_h_4b8939.pth https://dl.fbaipublicfiles.com/segment_anything/sam_vit_h_4b8939.pth
wget -O data/models/groundingdino_swint_ogc.pth https://github.com/IDEA-Research/GroundingDINO/releases/download/v0.1.0-alpha/groundingdino_swint_ogc.pth
等待下载完成:

5、下载HM3D数据集
从这里下载 HM3D 场景数据集,从这里下载实例-图像-目标导航事件数据集。
数据集的结构概述如下:
UniGoal/
└── data/
├── datasets/
│ └── instance_imagenav/
│ └── hm3d/
│ └── v3/
│ └── val/
│ ├── content/
│ │ ├── 4ok3usBNeis.json.gz
│ │ ├── 5cdEh9F2hJL.json.gz
│ │ ├── ...
│ │ └── zt1RVoi7PcG.json.gz
│ └── val.json.gz
└── scene_datasets/
└── hm3d_v0.2/
└── val/
├── 00800-TEEsavR23oF/
│ ├── TEEsavR23oF.basis.glb
│ └── TEEsavR23oF.basis.navmesh
├── 00801-HaxA7YrQdEC/
├── ...
└── 00899-58NLZxWBSpk/
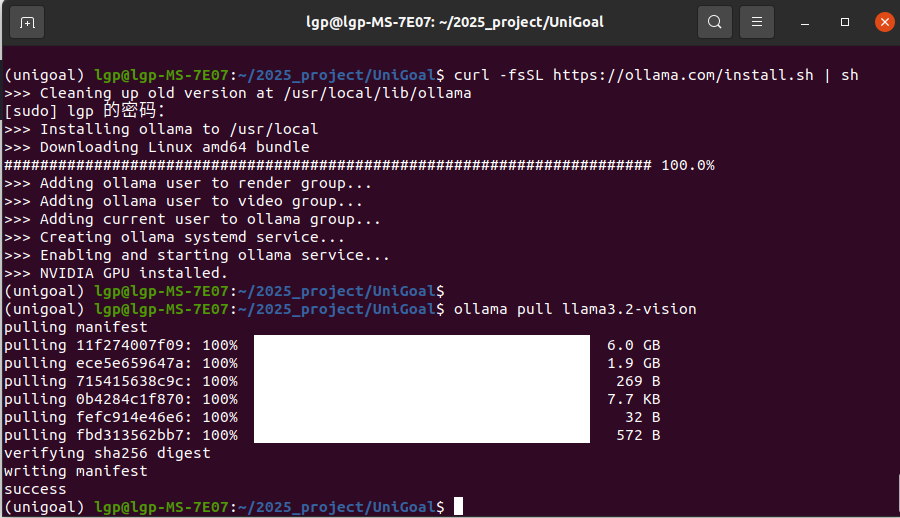
6、安装Ollama,配置LLM 和 VLM
分别执行下面命令:
curl -fsSL https://ollama.com/install.sh | sh
ollama pull llama3.2-vision成功啦~
7、模型推理
运行main.py,就可以进行模型推理啦
python main.py 打印信息:
[22:03:27:032178]:[Assets] ResourceManager.cpp(2210)::loadMaterials : Idx 26:Flat.
[22:03:27:032183]:[Assets] ResourceManager.cpp(2210)::loadMaterials : Idx 27:Flat.
[22:03:27:062166]:[Sim] Simulator.cpp(442)::instanceStageForSceneAttributes : Successfully loaded stage named : data/scene_datasets/hm3d_v0.2/val/00877-4ok3usBNeis/4ok3usBNeis.basis.glb
[22:03:27:062184]:[Sim] Simulator.cpp(474)::instanceStageForSceneAttributes :
---
The active scene does not contain semantic annotations : activeSemanticSceneID_ = 0
---
[22:03:27:062207]:[Sim] Simulator.cpp(208)::reconfigure : CreateSceneInstance success == true for active scene name : data/scene_datasets/hm3d_v0.2/val/00877-4ok3usBNeis/4ok3usBNeis.basis.glb with renderer.
[22:03:27:067606]:[Nav] PathFinder.cpp(568)::build : Building navmesh with 222 x 162 cells
[22:03:27:121110]:[Nav] PathFinder.cpp(842)::build : Created navmesh with 340 vertices 163 polygons
[22:03:27:121130]:[Sim] Simulator.cpp(898)::recomputeNavMesh : reconstruct navmesh successful
2025-05-12 22:03:27,122 Initializing task InstanceImageNav-v1
[05/12 22:03:27 detectron2]: Arguments: Namespace(confidence_threshold=0.5, config_file='configs/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml', input=['input1.jpeg'], opts=['MODEL.WEIGHTS', 'detectron2://COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl', 'MODEL.DEVICE', 'cuda:0'], output=None, video_input=None, webcam=False)
[05/12 22:03:27 d2.checkpoint.detection_checkpoint]: [DetectionCheckpointer] Loading from detectron2://COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl ...
[22:03:27:595720]:[Sensor] Sensor.cpp(69)::~Sensor : Deconstructing Sensor
Loading episodes from: data/datasets/instance_imagenav/hm3d/v3/val/content/4ok3usBNeis.json.gz
Changing scene: 0/data/scene_datasets/hm3d_v0.2/val/00877-4ok3usBNeis/4ok3usBNeis.basis.glb
rank:0, episode:1, cat_id:0, cat_name:chair看一下运行效果,查找椅子:
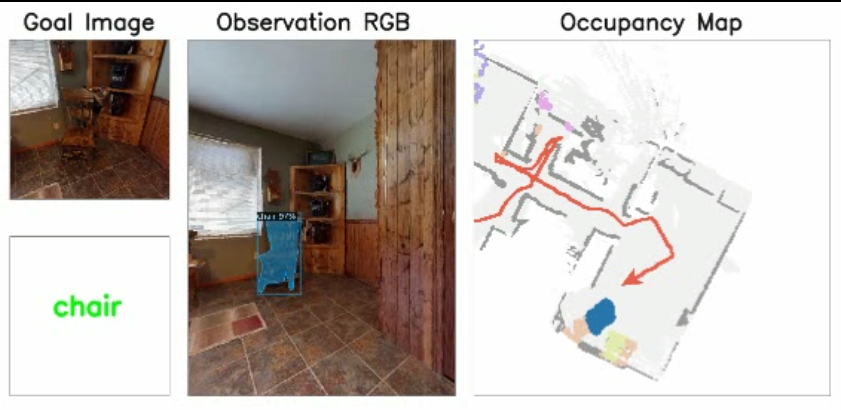
查找不同的椅子,模型会根据输入的实例图片进行匹配的

查找卫生间:

分享完成~
相关文章推荐:
UniGoal 具身导航 | 通用零样本目标导航 CVPR 2025-CSDN博客
【机器人】复现 ECoT 具身思维链推理-CSDN博客
相关文章:
【机器人】复现 UniGoal 具身导航 | 通用零样本目标导航 CVPR 2025
UniGoal的提出了一个通用的零样本目标导航框架,能够统一处理多种类型的导航任务。 支持 对象类别导航、实例图像目标导航和文本目标导航,而无需针对特定任务进行训练或微调。 本文分享UniGoal复现和模型推理的过程~ 查找沙发,模…...

基于大模型预测的吉兰 - 巴雷综合征综合诊疗方案研究报告大纲
目录 一、引言(一)研究背景(二)研究目的与意义二、大模型预测吉兰 - 巴雷综合征的理论基础与技术架构(一)大模型原理概述(二)技术架构设计三、术前预测与手术方案制定(一)术前预测内容(二)手术方案制定依据与策略四、术中监测与麻醉方案调整(一)术中监测指标与数…...

spring中的@PropertySource注解详解
一、核心功能与作用 PropertySource是Spring框架中用于加载外部配置文件的核心注解,主要作用是将属性文件(如.properties、.yml)的键值对加载到Spring的Environment环境中,实现配置与代码的解耦。其核心价值包括: 外部…...

ChromeDriver 技术生态与应用场景深度解析
ChromeDriver 技术生态与应用场景深度解析 随着 Web 自动化测试、运维和数据采集需求的不断增长,ChromeDriver 及其相关技术栈在各行业中扮演着举足轻重的角色。本文将从技术选型、语言适配、典型场景、技术延伸等维度,结合最新行业趋势与实践经验&…...

【NextPilot日志移植】日志写入流程
📝 文件后端日志写入流程详解 当后端选择文件时,日志写入过程主要涉及 LogWriter 和 LogWriterFile 类的协作。以下是详细的日志写入过程解释及涉及的代码: 1. LogWriter 类初始化 在 LogWriter 类的构造函数中,如果配置的后端…...
二极管钳位电路——Multisim电路仿真
目录 二极管钳位电路 2.1 二极管正向钳位电路 二极管压降测试 2.1.1 二极管正向钳位电路图 2.1.2 二极管正向钳位工作原理 2.2 二极管负向钳位电路 2.2.1 二极管负向钳位电路图 2.2.2 二极管负向钳位工作原理 二极管正向反向钳位仿真电路实验结果 2.3 二极管顶部钳位…...

Docker编排工具---Compose的概述及使用
目录 一、Compose工具的概述 二、Compose的常用命令 1、列出容器 2、查看访问日志 3、输出绑定的公共端口 4、重新构建服务 5、启动服务 6、停止服务 7、删除已停止服务的容器 8、创建和启动容器 9、在运行的容器中执行命令 10、指定一个服务启动容器的个数 11、其…...

5.10-套接字通信 - C++
套接字通信 1.1 通信效率问题 服务器端 单线程 / 单进程 无法使用,不支持多客户端 多线程 / 多进程 写程序优先考虑多线程:什么时候考虑多进程? 启动了一个可执行程序 A ,要在 A 中启动一个可执行程序 B 支持多客户端连接 IO 多…...
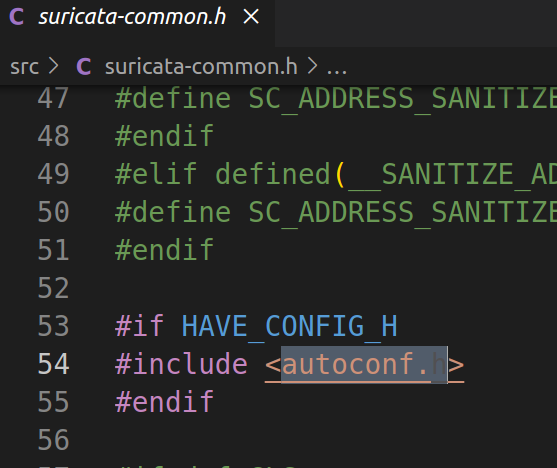
suricata增加单元测试编译失败
一、环境 $ lsb_release -a No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 22.04.5 LTS Release: 22.04 Codename: jammysuricata: suricata7.0.5 IDE: vscode 二、背景 在suricata中开发了某个功能后,增加unittest时,…...

高并发场景下的BI架构设计:衡石分布式查询引擎与缓存分级策略
在电商大促、金融交易时段或IoT实时监控场景中,企业BI系统常面临瞬时万级并发查询的冲击——运营团队需要实时追踪GMV波动,风控部门需秒级响应欺诈检测,产线监控需毫秒级反馈设备状态。传统单体架构的BI系统在此类场景下极易崩溃,…...

鱼眼摄像头(一)多平面格式 单缓冲读取图像并显示
鱼眼摄像头(一)多平面格式 单缓冲读取图像并显示 1.摄像头格式 1. 单平面格式(Single Plane):各通道数据保存在同一个平面(缓冲),图像数据按行连续存储a. mjpeg,yuyv等…...

机器学习笔记——特征工程
大家好,这里是好评笔记,公主号:Goodnote,专栏文章私信限时Free。本笔记介绍机器学习中常见的特征工程方法、正则化方法和简要介绍强化学习。 文章目录 特征工程(Fzeature Engineering)1. 特征提取ÿ…...
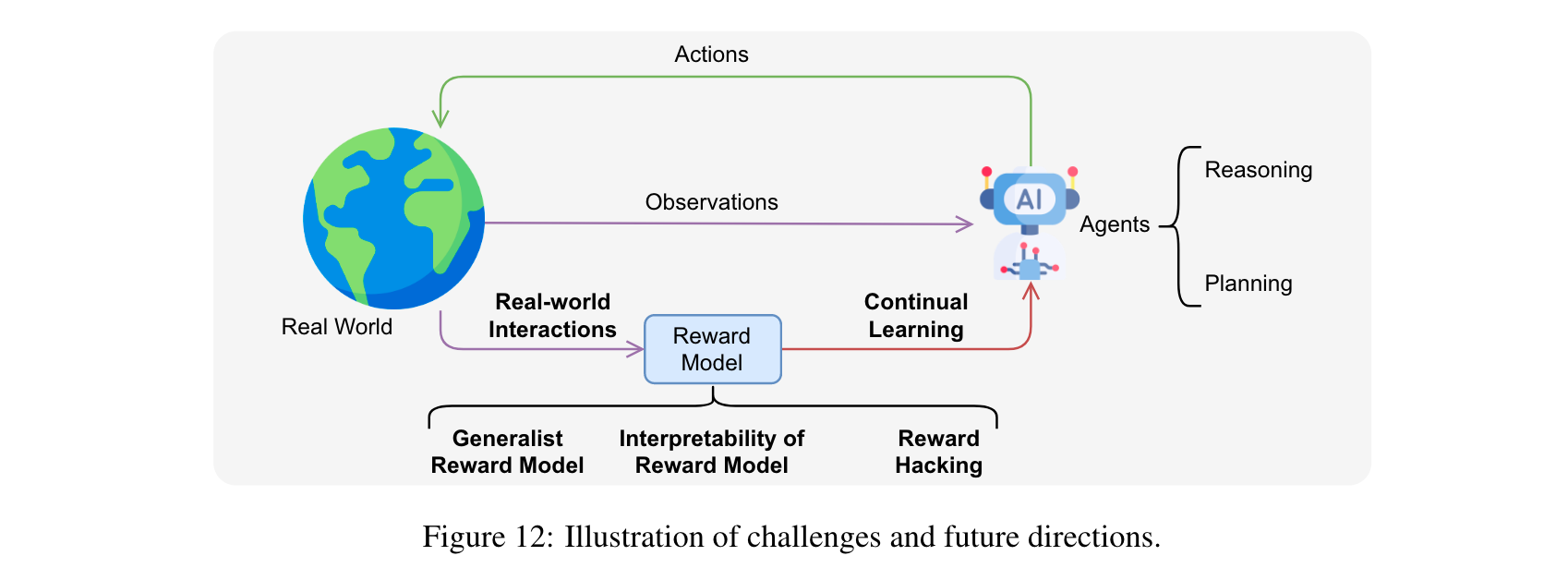
A Survey of Learning from Rewards:从训练到应用的全面剖析
A Survey of Learning from Rewards:从训练到应用的全面剖析 你知道大语言模型(LLMs)如何通过奖励学习变得更智能吗?这篇论文将带你深入探索。从克服预训练局限的新范式,到训练、推理各阶段的策略,再到广泛…...

Python爬虫第20节-使用 Selenium 爬取小米商城空调商品
目录 前言 一、 本文目标 二、环境准备 2.1 安装依赖 2.2 配置 ChromeDriver 三、小米商城页面结构分析 3.1 商品列表结构 3.2 分页结构 四、Selenium 自动化爬虫实现 4.1 脚本整体结构 4.2 代码实现 五、关键技术详解 5.1 Selenium 启动与配置 5.2 页面等待与异…...

无线定位之 三 SX1302 网关源码 thread_gps 线程详解
前言 笔者计划通过无线定位系列文章、系统的描述 TDOA 无线定位和混合定位相关技术知识点, 并以实践来验证此定位系统精度。 笔者从实践出发、本篇直接走读无线定位系统关键节点、网关 SX1302 源码框架,并在源码走读过程 中、着重分析与无线定位相关的PPS时间的来龙去脉、并在…...

Aware和InitializingBean接口以及@Autowired注解失效分析
Aware 接口用于注入一些与容器相关信息,例如: a. BeanNameAware 注入 Bean 的名字 b. BeanFactoryAware 注入 BeanFactory 容器 c. ApplicationContextAware 注入 ApplicationContext 容器 d. EmbeddedValueResolverAware 注入 解析器&a…...

Unity3D仿星露谷物语开发41之创建池管理器
1、目标 在PersistentScene中创建池管理器(Pool Manager)。这将允许一个预制对象池被创建和重用。 在游戏中当鼠标点击地面时,便会启用某一个对象。比如点击地面,就创建了一棵树,而这棵树是从预制体对象池中获取的&a…...

Modbus协议介绍
Modbus是一种串行通信协议,由Modicon公司(现为施耐德电气)在1979年为可编程逻辑控制器(PLC)通信而开发。它是工业自动化领域最常用的通信协议之一,具有开放性、简单性和跨平台兼容性,广泛应用于…...

深度学习遇到的问题处理
小土堆课程学习 1.tensorboard远程到本地无法显示 1.检查本地与远程端口是否被占用 2.一定要在远程服务器的项目下创建对应的存储文件夹 且 远程服务器一定要有需要处理的数据 ## 此时远程项目路径下有logs文件夹 存放上传的图像与数据 writerSummaryWriter("logs"…...
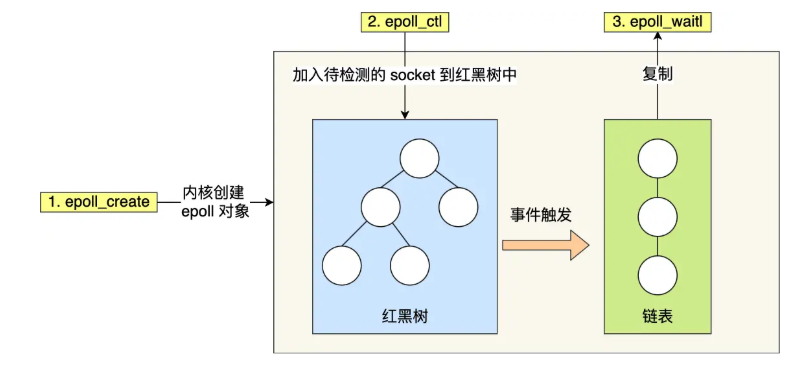
I/O多路复用(select/poll/epoll)
通过一个进程来维护多个Socket,也就是I/O多路复用,是一种常见的并发编程技术,它允许单个线程或进程同时监视多个输入/输出(I/O)流(例如网络连接、文件描述符)。当任何一个I/O流准备好进行读写操…...

Westlake-Omni 情感端音频生成式输出模型
简述 github地址在 GitHub - xinchen-ai/Westlake-OmniContribute to xinchen-ai/Westlake-Omni development by creating an account on GitHub.https://github.com/xinchen-ai/Westlake-Omni Westlake-Omni 是由西湖心辰(xinchen-ai)开发的一个开源…...

Egg.js知识框架
一、Egg.js 核心概念 1. Egg.js 简介 基于 Koa 的企业级 Node.js 框架(阿里开源) 约定优于配置(Convention over Configuration) 插件化架构,内置多进程管理、日志、安全等能力 适合中大型企业应用,提供…...
随手记录5
一些顶级思维: 顶级思维 1、永远不要自卑。 也永远不要感觉自己比别人差,这个人有没有钱,有多少钱,其实跟你都没有关系。有很多人就是那个奴性太强,看到比自己优秀的人,甚至一些装逼的人,这…...
Linux驱动:驱动编译流程了解
要求 1、开发板中的linux的zImage必须是自己编译的 2、内核源码树,其实就是一个经过了配置编译之后的内核源码。 3、nfs挂载的rootfs,主机ubuntu中必须搭建一个nfs服务器。 内核源码树 解压 tar -jxvf x210kernel.tar.bz2 编译 make x210ii_qt_defconfigmakeCan’t use ‘…...
使用 Flowise 构建基于私有知识库的智能客服 Agent(图文教程)
使用 Flowise 构建基于私有知识库的智能客服 Agent(图文教程) 在构建 AI 客服时,常见的需求是让机器人基于企业自身的知识文档,提供准确可靠的答案。本文将手把手教你如何使用 Flowise + 向量数据库(如 Pinecone),构建一个结合 RAG(Retrieval-Augmented Generation)检…...
RabbitMQ ③-Spring使用RabbitMQ
Spring使用RabbitMQ 创建 Spring 项目后,引入依赖: <!-- https://mvnrepository.com/artifact/org.springframework.boot/spring-boot-starter-amqp --> <dependency><groupId>org.springframework.boot</groupId><artifac…...

测试文章标题01
模型上下文协议(Model Context Protocol, MCP)深度解析 一、MCP的核心概念 模型上下文协议(Model Context Protocol, MCP)是一种用于规范机器学习模型与外部环境交互的标准化框架。其核心目标是通过定义统一的接口和数据格式&am…...
linux中常用的命令(四)
目录 1-cat查看文件内容 2-more命令 3-less命令 4-head命令 5-tail命令 1-cat查看文件内容 cat中的一些操作 -b : 列出行号(不含空白行)-E : 将结尾的断行以 $ 的形式展示出来-n : 列出行号(含空白行)-T : 将 tab 键 以 ^I 显示…...
)
2025年阿里云大数据ACP高级工程师认证模拟试题(附答案解析)
这篇文章的内容是阿里云大数据ACP高级工程师认证考试的模拟试题。 所有模拟试题由AI自动生成,主要为了练习和巩固知识,并非所谓的 “题库”,考试中如果出现同样试题那真是纯属巧合。 1、下列关于MaxCompute的描述中,错误的是&am…...

【FAQ】HarmonyOS SDK 闭源开放能力 — PDF Kit
1.问题描述: 预览PDF文件,文档上所描述的loadDocument接口,可以返回文件的状态,并无法实现PDF的预览,是否有能预览PDF相关接口? 解决方案: 1、执行loadDocument进行加载PDF文件后,…...