西门子 S1500 PLC 通过 Profinet 对 6 台施耐德 ATV304 变频器的控制,用于 6 台升降台的位置控制。
西门子 S1500 PLC 通过 Profinet 对 6 台施耐德 ATV304 变频器的控制,用于 6 台升降台的位置控制。程序主要特点:
- 模块化设计:采用功能块数组结构,实现对多台设备的统一控制
- 循环控制:使用 FOR 循环遍历每台升降台,减少代码冗余
- 独立控制:每台升降台具有独立的使能、复位、目标位置设置
- 状态监控:对每台升降台的运行状态、位置和故障进行独立监控
程序代码分为三部分,分别为主程序,位置控制程序,安全程序
1、以下为主程序 (MainProgram):负责整体控制流程和协调各个功能块
MainProgram.ST
FUNCTION_BLOCK MainProgram
{ S7_Optimized_Access = 'TRUE' }
VERSION : 0.1
VAR_INPUT
Enable : ARRAY[1..6] OF BOOL; // 各升降台使能信号
Reset : ARRAY[1..6] OF BOOL; // 各升降台复位信号
TargetPosition : ARRAY[1..6] OF REAL; // 各升降台目标位置
END_VAR
VAR_OUTPUT
SystemReady : ARRAY[1..6] OF BOOL; // 各升降台系统就绪信号
PositionReached : ARRAY[1..6] OF BOOL; // 各升降台位置到达信号
Fault : ARRAY[1..6] OF BOOL; // 各升降台故障信号
FaultCode : ARRAY[1..6] OF INT; // 各升降台故障代码
END_VAR
VAR
// 位置控制相关变量
CurrentPosition : ARRAY[1..6] OF REAL; // 各升降台当前位置
// 功能块实例数组
FB_PositionControl : ARRAY[1..6] OF PositionControl; // 位置控制功能块
FB_SafetyCheck : ARRAY[1..6] OF SafetyCheck; // 安全检查功能块
// 循环变量
i : INT;
END_VAR
// 主程序实现
FOR i := 1 TO 6 DO
// 安全信号检查
FB_SafetyCheck[i](
UpperLimit := "ATV304_Drive" & i.UpperLimit,
LowerLimit := "ATV304_Drive" & i.LowerLimit,
RopeFault := "ATV304_Drive" & i.RopeFault,
Fault => Fault[i],
FaultCode => FaultCode[i]
);
// 如果有安全故障,直接停机
IF Fault[i] THEN
// 通过Profinet停止变频器
P#DB100 + (i-1)*16 DBX0.0 BYTE 8 := B#16#00; // 控制字清零
PositionReached[i] := FALSE;
SystemReady[i] := FALSE;
ELSE
// 检查Profinet连接状态
SystemReady[i] := Enable[i] AND NOT Fault[i] AND "ATV304_Drive" & i.PNIO_OB_1;
// 读取变频器状态和故障信息
IF "ATV304_Drive" & i.StatusWord.DriveFault THEN
Fault[i] := TRUE;
FaultCode[i] := "ATV304_Drive" & i.FaultCode;
P#DB100 + (i-1)*16 DBX0.0 BYTE 8 := B#16#00; // 控制字清零
ELSE
// 从变频器读取编码器位置
CurrentPosition[i] := REAL("ATV304_Drive" & i.ActualPosition);
// 位置控制处理
IF SystemReady[i] THEN
FB_PositionControl[i](
Enable := Enable[i],
TargetPosition := TargetPosition[i],
CurrentPosition := CurrentPosition[i],
DriveControl => P#DB100 + (i-1)*16 DBX0.0 BYTE 8, // 直接操作Profinet输出区域
PositionReached => PositionReached[i]
);
ELSE
P#DB100 + (i-1)*16 DBX0.0 BYTE 8 := B#16#00; // 控制字清零
END_IF;
END_IF;
END_IF;
END_FOR;
END_FUNCTION_BLOCK
2、位置控制 (PositionControl):实现基于编码器反馈的位置闭环控制
FUNCTION_BLOCK PositionControl
{ S7_Optimized_Access = 'TRUE' }
VERSION : 0.1
VAR_INPUT
Enable : BOOL;
TargetPosition : REAL; // 目标位置
CurrentPosition : REAL; // 当前位置
END_VAR
VAR_OUTPUT
DriveControl : POINTER TO BYTE; // 变频器控制字指针
PositionReached : BOOL; // 位置到达标志
END_VAR
VAR
// PID控制器参数
PID_Config : PID_ConfigType;
PID_Input : REAL;
PID_Output : REAL;
PID_Error : REAL;
// 位置控制参数
PositionTolerance : REAL := 0.5; // 位置容差(单位取决于应用)
MaxSpeed : REAL := 100.0; // 最大速度
Acceleration : REAL := 50.0; // 加速度
Deceleration : REAL := 50.0; // 减速度
// 运动状态
MotionState : INT; // 0: 停止, 1: 加速, 2: 匀速, 3: 减速
// 控制字结构
ControlWord : STRUCT
Run : BOOL; // 运行命令
EnableOp : BOOL; // 使能操作
QuickStop : BOOL; // 快速停止
FaultReset : BOOL; // 故障复位
Mode : WORD; // 控制模式
SpeedRef : REAL; // 速度给定
END_STRUCT;
END_VAR
// 位置控制功能块实现
// 初始化PID控制器
PID_Config.CYCLE := T#100ms; // 控制周期
PID_Config.DEADBAND := 0.1; // 死区
PID_Config.GAIN := 1.0; // 比例增益
PID_Config.TI := T#1s; // 积分时间
PID_Config.TD := T#0s; // 微分时间
PID_Config.MIN := -MaxSpeed; // 输出最小值
PID_Config.MAX := MaxSpeed; // 输出最大值
// 计算位置误差
PID_Error := TargetPosition - CurrentPosition;
// 位置到达判断
PositionReached := ABS(PID_Error) <= PositionTolerance;
// 位置控制逻辑
IF Enable THEN
// 根据位置误差计算输出
IF ABS(PID_Error) > PositionTolerance THEN
// 计算所需速度
IF PID_Error > 0 THEN
// 需要向上移动
PID_Output := MIN(MaxSpeed, PID_Error * 10.0); // 简化的P控制
ELSE
// 需要向下移动
PID_Output := MAX(-MaxSpeed, PID_Error * 10.0); // 简化的P控制
END_IF;
// 设置控制字
ControlWord.Run := TRUE;
ControlWord.EnableOp := TRUE;
ControlWord.QuickStop := FALSE;
ControlWord.Mode := 16#0001; // 速度控制模式
ControlWord.SpeedRef := PID_Output;
ELSE
// 位置已到达,停止运动
ControlWord.Run := FALSE;
ControlWord.EnableOp := FALSE;
END_IF;
ELSE
// 未使能,停止运动
ControlWord.Run := FALSE;
ControlWord.EnableOp := FALSE;
PositionReached := FALSE;
END_IF;
// 将控制字写入Profinet输出区域
DriveControl^ := ControlWord.Run;
DriveControl^ + 1 := ControlWord.EnableOp;
DriveControl^ + 2 := ControlWord.QuickStop;
DriveControl^ + 3 := ControlWord.FaultReset;
P#DriveControl + 4 WORD 1 := ControlWord.Mode;
P#DriveControl + 6 REAL 1 := ControlWord.SpeedRef;
END_FUNCTION_BLOCK
3、安全检查 (SafetyCheck):监控极限、限位和松乱绳等安全信号
FUNCTION_BLOCK SafetyCheck
{ S7_Optimized_Access = 'TRUE' }
VERSION : 0.1
VAR_INPUT
UpperLimit : BOOL; // 上极限信号
LowerLimit : BOOL; // 下极限信号
RopeFault : BOOL; // 松乱绳信号
END_VAR
VAR_OUTPUT
Fault : BOOL; // 安全故障标志
FaultCode : INT; // 安全故障代码
END_VAR
VAR
// 安全状态变量
FaultDetected : BOOL;
FaultTimer : TON; // 故障定时器
END_VAR
// 安全检查功能块实现
// 检查安全信号
FaultDetected := UpperLimit OR LowerLimit OR RopeFault;
// 使用定时器过滤干扰信号
FaultTimer(IN := FaultDetected, PT := T#200ms);
IF FaultTimer.Q THEN
Fault := TRUE;
// 确定故障代码
IF UpperLimit THEN
FaultCode := 1001; // 上极限故障
ELSIF LowerLimit THEN
FaultCode := 1002; // 下极限故障
ELSIF RopeFault THEN
FaultCode := 1003; // 松乱绳故障
END_IF;
ELSE
Fault := FALSE;
FaultCode := 0;
END_IF;
END_FUNCTION_BLOCK
相关文章:

西门子 S1500 PLC 通过 Profinet 对 6 台施耐德 ATV304 变频器的控制,用于 6 台升降台的位置控制。
西门子 S1500 PLC 通过 Profinet 对 6 台施耐德 ATV304 变频器的控制,用于 6 台升降台的位置控制。程序主要特点: 模块化设计:采用功能块数组结构,实现对多台设备的统一控制循环控制:使用 FOR 循环遍历每台升降台&…...

重构金融数智化产业版图:中电金信“链主”之道
近日,《商学院》杂志独家专访了中电金信常务副总经理(主持经营工作)冯明刚,围绕“金融科技”“数字底座”“架构转型”“AI驱动”等议题,展开了一场关于未来架构、技术变革与系统创新的深入对话。 当下,数字…...

高光谱遥感图像处理之数据分类的fcm算法
基于模糊C均值聚类(FCM)的高光谱遥感图像分类MATLAB实现示例 %% FCM高光谱图像分类示例 clc; clear; close all;%% 数据加载与预处理 % 加载示例数据(此处使用公开数据集Indian Pines的简化版) load(indian_pines.mat); % 包含变…...
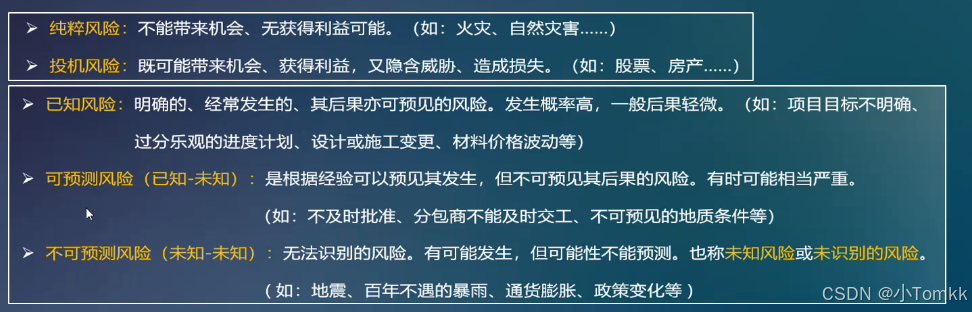
2025年PMP 学习十六 第11章 项目风险管理 (总章)
2025年PMP 学习十六 第11章 项目风险管理 (总章) 第11章 项目风险管理 序号过程过程组1规划风险管理规划2识别风险规划3实施定性风险分析规划4实施定量风险分析规划5规划风险应对执行6实施风险应对执行7监控风险监控 目标: 提高项目中积极事件的概率和…...

IEEE 列表会议第五届机器人、自动化与智能控制国际会议
会议地点:中国 成都 会议官网:ICRAIC 主办单位:成都理工大学 协办单位:成都大学 早鸟截稿:2025年7月15日 截稿时间:2025年8月20日 出版信息:IEEE出版&EI数据库 会议时间:…...

基于 React Hook 封装 Store 的三种方案
基于 React Hook 封装 Store 的三种方案 方案一:基于 useSyncExternalStore 的轻量级 Store(推荐) import { useSyncExternalStore } from react;type Store<T> {state: T;listeners: Set<() > void>; };function createSt…...

Gmsh 读取自定义轮廓并划分网格:深入解析与实践指南
一、Gmsh 简介 (一)Gmsh 是什么 Gmsh 是一款功能强大的开源有限元网格生成器,广泛应用于工程仿真、数值模拟以及计算机图形学等领域。它为用户提供了从几何建模到网格划分的一整套解决方案,能够有效处理复杂几何形状,生成高质量的二维和三维网格,满足多种数值方法的需求…...
bili.png
import pygame as pg import sys import time import randompg.init() screen pg.display.set_mode((800,500)) pg.display.set_caption(runcool) screen.fill((135, 206, 235)) bili pg.image.load(bili.png)#得分 coin 0 game_font pg.font.Font(None, 50)#人物大小…...

【设计模式】- 行为型模式1
模板方法模式 定义了一个操作中的算法骨架,将算法的一些步骤推迟到子类,使得子类可以不改变该算法结构的情况下重定义该算法的某些步骤 【主要角色】: 抽象类:给出一个算法的轮廓和骨架(包括一个模板方法 和 若干基…...

GMT之Bash语言使用
GMT的操作有自己的逻辑和“命令”,但GMT是可以用Bash语言控制的,所以常常以.sh为后缀写GMT程序。 GMT程序运行步骤如下: 采用cd ,定位到指定文件夹;以sh ***.sh运行GMT,得到结果。 另外,遇到…...

AI神经网络降噪算法在语音通话产品中的应用优势与前景分析
采用AI降噪的语言通话环境抑制模组性能效果测试 一、引言 随着人工智能技术的快速发展,AI神经网络降噪算法在语音通话产品中的应用正逐步取代传统降噪技术,成为提升语音质量的关键解决方案。相比传统DSP(数字信号处理)降噪&#…...

ISBI 2012 EM 神经元结构分割数据集复现UNet
一些笔记在代码的注释中 因为使用的数据集比较简单,所以没有使用模型可视化和调试的内容,只是简单的数据集预处理和模型的搭建以及训练。 # 1. PyTorch 基础模块 import torch # 张量操作 import torch.nn as nn # 构建神经网…...

Java视频流RTMP/RTSP协议解析与实战代码
在Java中实现视频直播的输入流处理,通常需要结合网络编程、多媒体处理库以及流媒体协议(如RTMP、HLS、RTSP等)。以下是实现视频直播输入流的关键步骤和技术要点: 1. 视频直播输入流的核心组件 网络输入流:通过Socket或…...
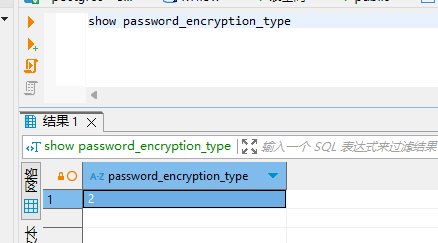
springboot连接高斯数据库(GaussDB)踩坑指南
1. 用户密码加密类型与gsjdbc4版本不兼容问题 我的数据库,设置的加密类型(password_encryption_type)是2, 直接使用gsjdbc4.jar连接数据库报错。 org.postgresql.util.PSQLException: Invalid or unsupported by client SCRAM mechanisms 后使用gsjdb…...
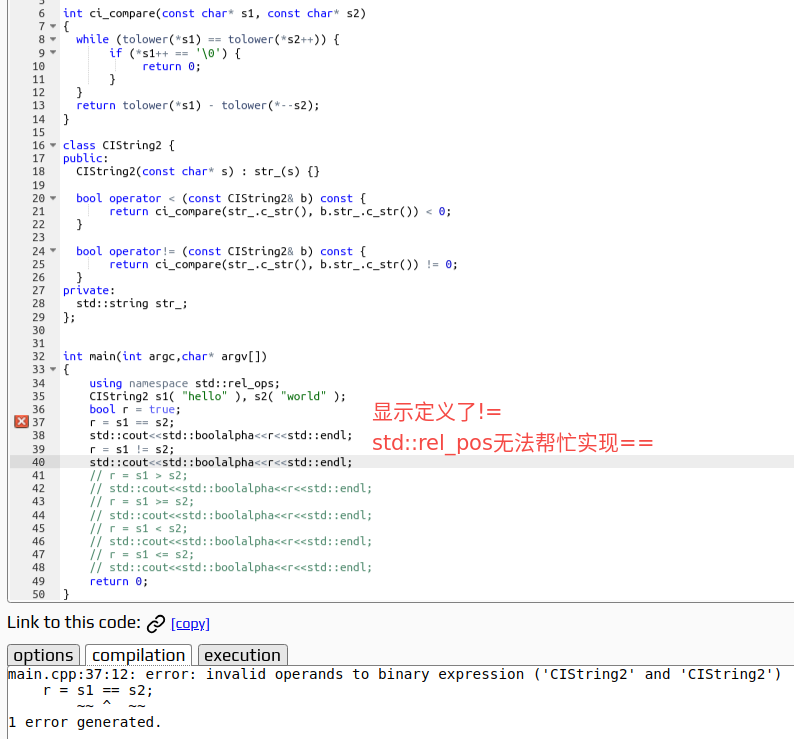
c++20引入的三路比较操作符<=>
目录 一、简介 二、三向比较的返回类型 2.1 std::strong_ordering 2.2 std::weak_ordering 2.3 std::partial_ordering 三、对基础类型的支持 四、自动生成的比较运算符函数 4.1 std::rel_ops的作用 4.2 使用<> 五、兼容他旧代码 一、简介 c20引入了三路比较操…...
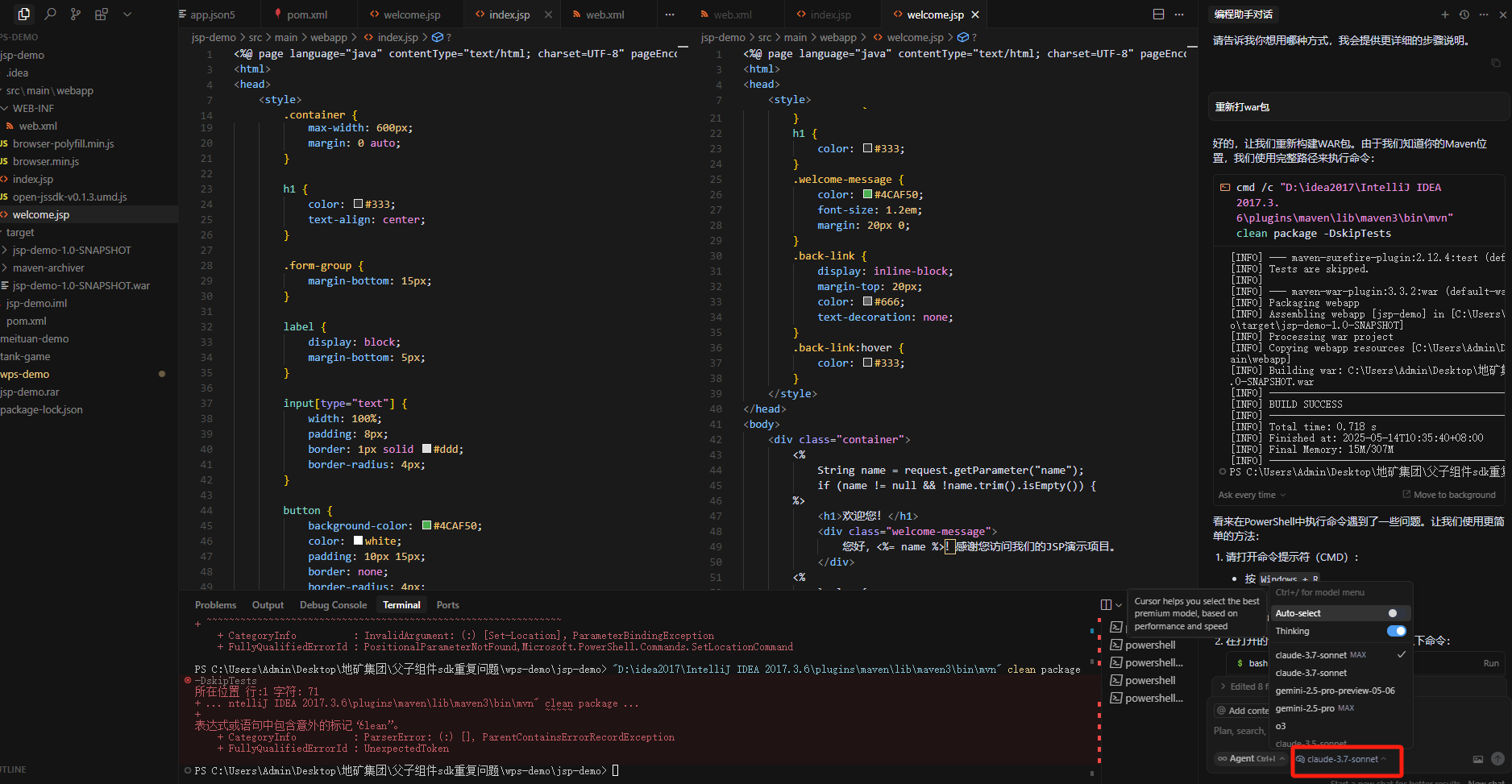
Cursor开发酒店管理系统
目录: 1、后端代码初始化2、使用Cursor打开spingboot项目3、前端代码初始化4、切换其他大模型5、Curosr无限续杯 1、后端代码初始化 找一个目录,使用idea在这个目录下新建springboot的项目。 2、使用Cursor打开spingboot项目 在根目录下新建.cursor文件…...

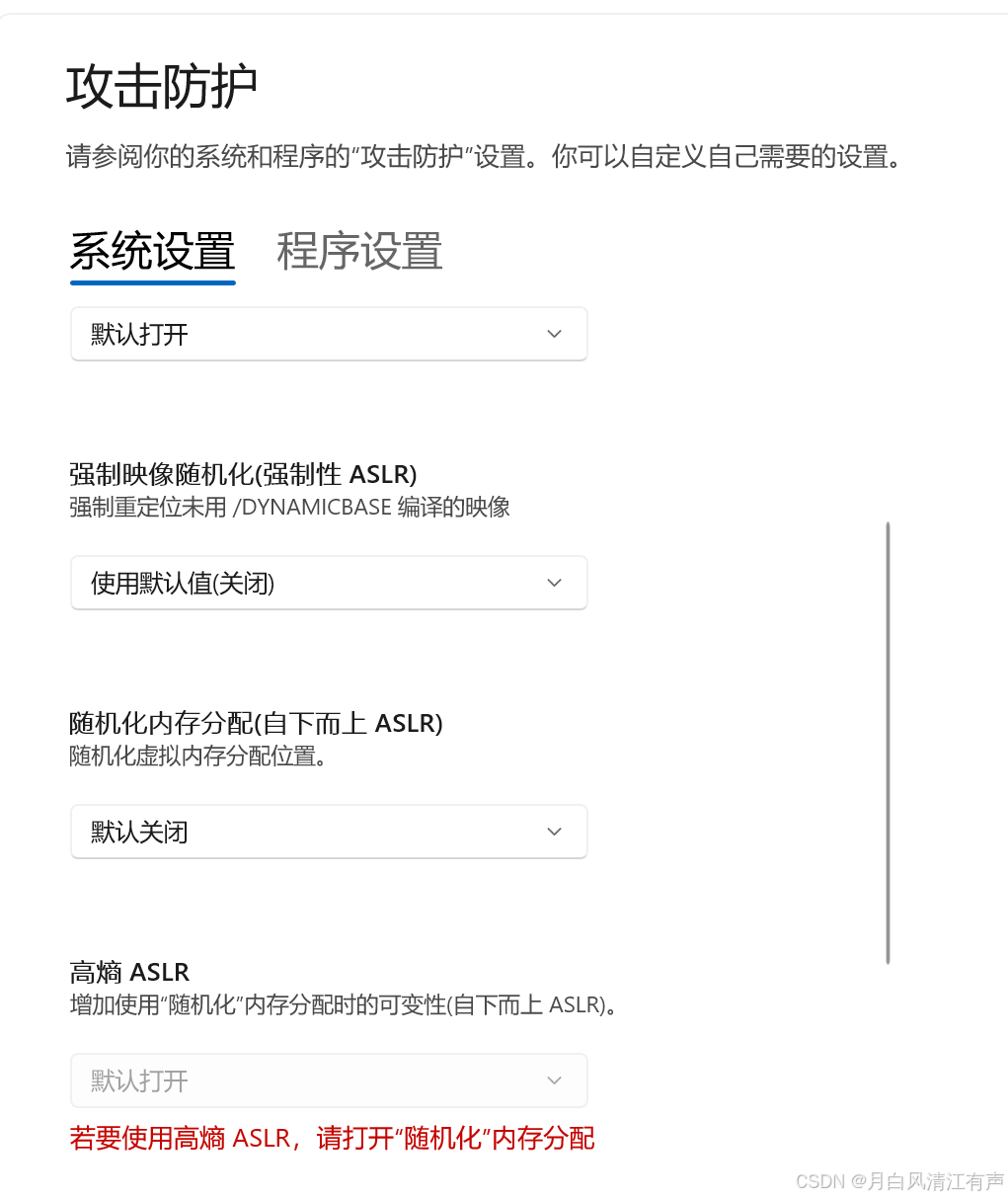
nosqlbooster pojie NoSQLBooster for MongoDB
测过可用,注意 asar的安装使用报错改用 npx asar extract app.asar app 路径 C:\Users{computerName}\AppData\Local\Programs\nosqlbooster4mongo\resources npm install asar -g asar extract app.asar app 打开shared\lmCore.js 修改MAX_TRIAL_DAYS3000 修改…...

基于 Flink 的实时推荐系统:从协同过滤到多模态语义理解
基于 Flink 的实时推荐系统:从协同过滤到多模态语义理解 嘿,各位技术小伙伴们!在这个信息爆炸的时代,你是不是常常惊叹于各大平台仿佛能 “读懂你的心”,精准推送你感兴趣的内容呢?今天,小编就…...

【HBase整合Hive】HBase-1.4.8整合Hive-2.3.3过程
HBase-1.4.8整合Hive-2.3.3过程 一、摘要二、整合过程三、注意事项 一、摘要 HBase集成Hive,由Hive来编写SQL语句操作HBase有以下好处: 简化操作:Hive提供了类SQL的查询语言HiveQL,对于熟悉SQL的用户来说,无需学习HBas…...

图像对比度调整(局域拉普拉斯滤波)
一、背景介绍 之前刷对比度相关调整算法,找到效果不错,使用局域拉普拉斯做图像对比度调整,尝试复现和整理了下相关代码。 二、实现流程 1、基本原理 对输入图像进行高斯金字塔拆分,对每层的每个像素都针对性处理,生产…...

如何在本地打包 StarRocks 发行版
字数 615,阅读大约需 4 分钟 最近我们在使用 StarRocks 的时候碰到了一些小问题: • 重启物化视图的时候会导致视图全量刷新,大量消耗资源。- 修复 PR:https://github.com/StarRocks/starrocks/pull/57371• excluded_refresh_tab…...
git使用的DLL错误
安装好git windows客户端打开git bash提示 Error: Could not fork child process: Resource temporarily unavailable (-1). DLL rebasing may be required; see ‘rebaseall / rebase –help’. 提示 MINGW64的DLL链接有问题,其实是Windows的安全中心限制了&…...

Elasticsearch倒排索引核心原理面试题
倒排索引核心原理面试题 🚀 目录 基础概念性能优化应用场景数据结构设计问题排查扩展思考基础概念 🔍 面试题1:基础概念 题目:Elasticsearch/Lucene的倒排索引(Inverted Index)是如何工作的?请描述从关键词搜索到返回文档的完整流程。 👉 查看参考答案 倒排索引…...
区块链blog1__合作与信任
🍂我们的世界 🌿不是孤立的,而是网络化的 如果是单独孤立的系统,无需共识,而我们的社会是网络结构,即结点间不是孤立的 🌿网络化的原因 而目前并未发现这样的理想孤立系统,即现实中…...
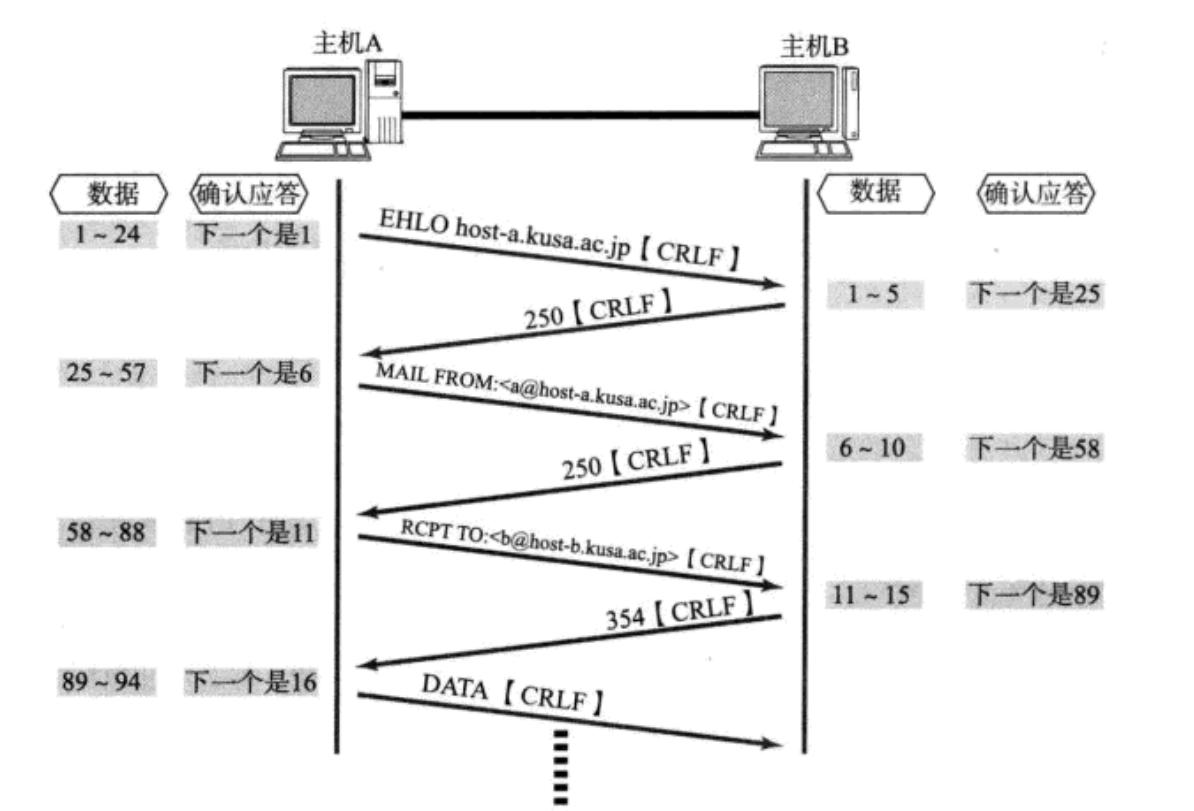
从数据包到可靠性:UDP/TCP协议的工作原理分析
之前我们已经使用udp/tcp的相关接口写了一些简单的客户端与服务端代码。也了解了协议是什么,包括自定义协议和知名协议比如http/https和ssh等。现在我们再回到传输层,对udp和tcp这两传输层巨头协议做更深一步的分析。 一.UDP UDP相关内容很简单…...

【CanMV K230】AI_CUBE1.4
《k230-AI 最近小伙伴有做模型的需求。所以我重新捡起来了。正好把之前没测过的测一下。 这次我们用的是全新版本。AICUBE1.4.dotnet环境9.0 注意AICUBE训练模型对硬件有所要求。最好使用独立显卡。 有小伙伴说集显也可以。emmmm可以试试哈 集显显存2G很勉强了。 我们依然用…...

vscode 默认环境路径
目录 1.下面放在项目根目录上: 2.settings.json内容: 自定义conda环境断点调试 启动默认参数: 1.下面放在项目根目录上: .vscode/settings.json 2.settings.json内容: {"python.analysis.extraPaths"…...

支付宝授权登录
支付宝授权登录 一、场景 支付宝小程序登录,获取用户userId 二、注册支付宝开发者账号 1、支付宝开放平台 2、点击右上角–控制台,创建小程序 3、按照步骤完善信息,生成密钥时会用到的工具 4、生成的密钥,要保管好ÿ…...
Fabric 服务端插件开发简述与聊天事件监听转发
原文链接:Fabric 服务端插件开发简述与聊天事件监听转发 < Ping通途说 0. 引言 以前写过Spigot的插件,非常简单,仅需调用官方封装好的Event类即可。但Fabric这边在开发时由于官方文档和现有互联网资料来看,可能会具有一定的误…...

认识Docker/安装Docker
一、认识Docker Docker的定义 Docker 是一个开源的应用容器引擎,允许开发者将应用及其依赖打包到一个轻量级、可移植的容器中。容器化技术使得应用可以在任何支持 Docker 的环境中运行,确保环境一致性。 Docker的核心组件 Docker Engine:负责…...