单片机设计_四轴飞行器(STM32)
四轴飞行器(STM32)
想要更多项目私wo!!!
四轴飞行器是一种通过四个旋翼产生的升力实现飞行的无人机,其核心控制原理基于欧拉角动力学模型。四轴飞行器通过改变四个电机的转速来实现六自由度控制(前后、左右、上下移动和俯仰、横滚、偏航旋转)
核心控制原理:
姿态感知:通过MPU6050/MPU9250等惯性测量单元获取飞行器的三轴加速度和三轴角速度数据
姿态解算:使用互补滤波或卡尔曼滤波算法将传感器数据转换为欧拉角(俯仰、横滚、偏航)
控制算法:采用串级PID控制,内环控制角速度,外环控制角度
电机混控:将控制量分配到四个电机,实现稳定飞行
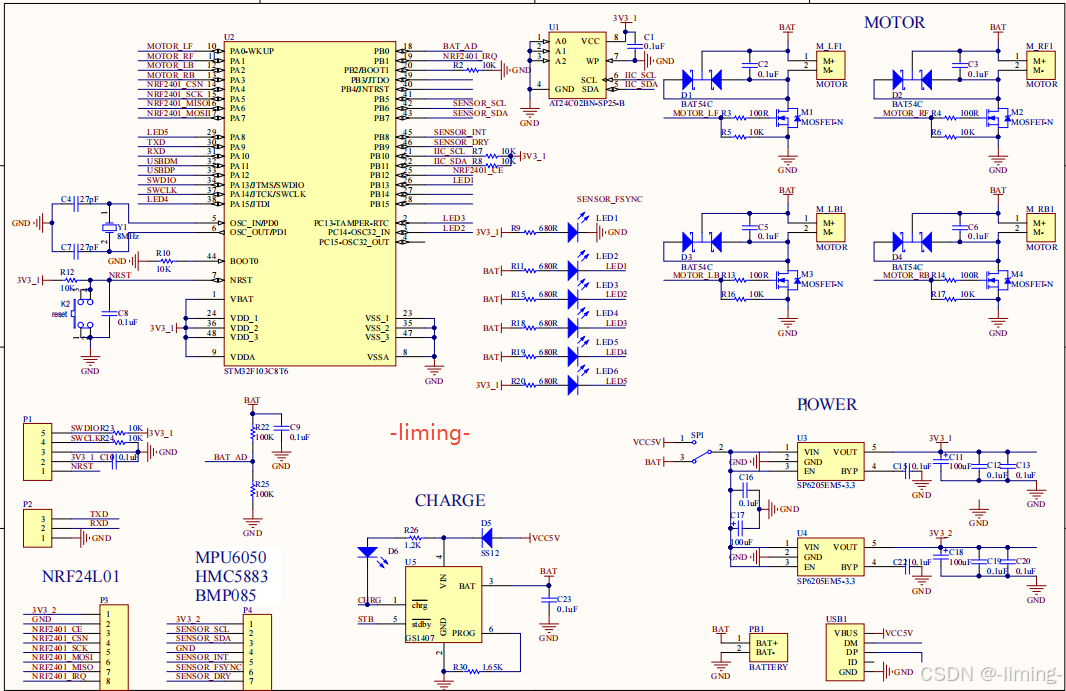
二、系统总体框图
飞控原理图
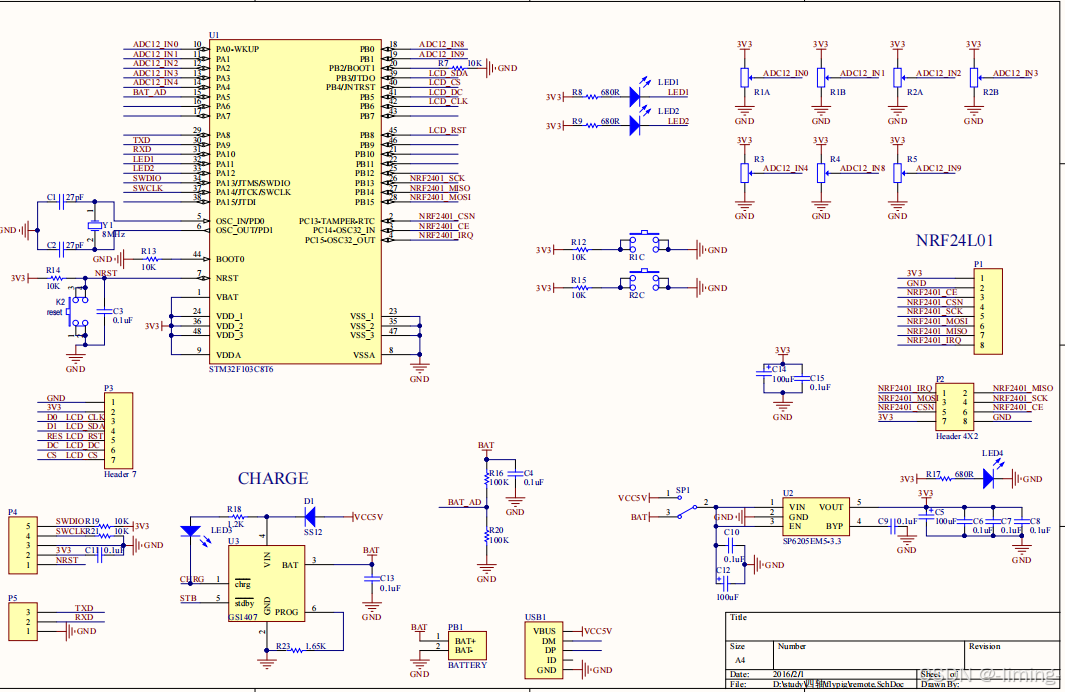
遥控器原理图
三、部分代码
#include "control.h"
#include "BSP.H"
#include "rc.h"
#include "imu.h"
#include "uart1.h"
PID PID_ROL,PID_PIT,PID_YAW;
u8 ARMED = 0;
extern vs16 QH,ZY,XZ;float Get_MxMi(float num,float max,float min)
{if(num>max)return max;else if(num<min)return min;elsereturn num;
}void CONTROL(float rol_now, float pit_now, float yaw_now, float rol_tar, float pit_tar, float yaw_tar)
{ //当前姿态角,,,目标姿态角u16 moto1=0,moto2=0,moto3=0,moto4=0;vs16 throttle;
// u8 moto[8];float rol = rol_tar + rol_now;float pit = pit_tar + pit_now;float yaw = yaw_tar + yaw_now;throttle = Rc_Get.THROTTLE - 1000; //1000<遥控油门值<2000if(throttle<0) throttle=0;PID_ROL.IMAX = throttle/10; //积分限幅,积分值不超过当前油门值的一半PID_ROL.IMAX = Get_MxMi(PID_ROL.IMAX,1000,0); //限制积分结果为,0到1000 PID_PIT.IMAX = PID_ROL.IMAX;PID_ROL.pout = PID_ROL.P * rol;PID_PIT.pout = PID_PIT.P * pit;
//、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、 /0.1 0.1 30 30if(rol_tar*rol_tar<1 && pit_tar*pit_tar<1 && rol_now*rol_now<100 && pit_now*pit_now<100 && throttle>300){ //防止角度大了,积分超调//目标姿态角水平,姿态角几乎水平,油门值不太低PID_ROL.iout += PID_ROL.I * rol;PID_PIT.iout += PID_PIT.I * pit;PID_ROL.iout = Get_MxMi(PID_ROL.iout,PID_ROL.IMAX,-PID_ROL.IMAX); //对输出的积分限幅PID_PIT.iout = Get_MxMi(PID_PIT.iout,PID_PIT.IMAX,-PID_PIT.IMAX);}else if(throttle<200){ //油门值较小时,积分项清零PID_ROL.iout = 0;PID_PIT.iout = 0;}
//、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、 // rc_roll_d = rol_tar - getlast_roll;
// getlast_roll = rol_tar;
// PID_ROL.dout = PID_ROL.D * (MPU6050_GYRO_LAST.X+rc_roll_d*300);//角速度+控制误差微分
//
// rc_pitch_d = pit_tar - getlast_pitch;
// getlast_pitch = pit_tar;
// PID_PIT.dout = PID_PIT.D * (MPU6050_GYRO_LAST.Y+rc_pitch_d*300);//角速度+控制误差微分PID_ROL.dout = PID_ROL.D * MPU6050_GYRO_LAST.X; PID_PIT.dout = PID_PIT.D * MPU6050_GYRO_LAST.Y;
/PID_YAW.pout = PID_YAW.P * yaw;//若 *yaw_now;锁尾模式!!!!//若 *yaw; 非锁尾模式!!!!
/vs16 yaw_d;/if(1480>Rc_Get.YAW || Rc_Get.YAW>1520) //给遥控加死区(偏航角的死区){yaw_d = MPU6050_GYRO_LAST.Z + (Rc_Get.YAW-1500)*10; //用Z轴角速度及目标偏航角值进行四轴运动的预判GYRO_I.Z = 0;}elseyaw_d = MPU6050_GYRO_LAST.Z;PID_YAW.dout = PID_YAW.D * yaw_d;
/ PID_ROL.OUT = PID_ROL.pout + PID_ROL.iout + PID_ROL.dout;PID_PIT.OUT = PID_PIT.pout + PID_PIT.iout + PID_PIT.dout;PID_YAW.OUT = PID_YAW.pout + PID_YAW.iout + PID_YAW.dout;if(throttle>200) //油门值大于200才起飞 (遥控油门值大于1200){
// moto1 = throttle - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto2 = throttle - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto3 = throttle + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto4 = throttle + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;// moto4 = throttle - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto3 = throttle - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto2 = throttle + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto1 = throttle + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT; // moto1 = throttle - 25 + QH + ZY - XZ - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto2 = throttle - 25 + QH - ZY + XZ - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto3 = throttle - 25 - QH + ZY + XZ + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto4 = throttle + 75 - QH - ZY - XZ + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;moto4 = throttle + QH + ZY - XZ - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;moto3 = throttle + QH - ZY + XZ - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;moto2 = throttle - QH + ZY + XZ + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;moto1 = throttle - QH - ZY - XZ + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;// moto1 = throttle;
// moto2 = throttle;
// moto3 = throttle;
// moto4 = throttle;}else{moto1 = 0;moto2 = 0;moto3 = 0;moto4 = 0;}// moto[1] = moto1 & 0xFF;
// moto[0] = (moto1>>8) & 0xFF;
// moto[3] = moto2 & 0xFF;
// moto[2] = (moto2>>8) & 0xFF;
// moto[5] = moto3 & 0xFF;
// moto[4] = (moto3>>8) & 0xFF;
// moto[7] = moto4 & 0xFF;
// moto[6] = (moto4>>8) & 0xFF; //Uart1_Send_Buf(moto,8); if(ARMED) Moto_PwmRflash(moto1,moto2,moto3,moto4); //未解锁则空心杯不转 ARMED=1则解锁else Moto_PwmRflash(0,0,0,0);
}相关文章:
单片机设计_四轴飞行器(STM32)
四轴飞行器(STM32) 想要更多项目私wo!!! 一、系统简介 四轴飞行器是一种通过四个旋翼产生的升力实现飞行的无人机,其核心控制原理基于欧拉角动力学模型。四轴飞行器通过改变四个电机的转速来实现六自由度控制(前后、左右、上下…...

kafka配置SASL_PLAINTEXT简单认证
Kafka ZooKeeper 开启 SASL_PLAINTEXT 认证(PLAIN机制)最全实战教程 💡 本教程将手把手教你如何为 Kafka 配置基于 SASL_PLAINTEXT PLAIN 的用户名密码认证机制,包含 Kafka 与 ZooKeeper 的全部配置,适合入门。 &…...

PostgreSQL简单使用
一、PostgreSQL概念 特点 开源与自由 标准符合性 数据类型丰富 事务与并发 扩展性 安全性 优势 高性能 高可用性 灵活性 社区支持 成本效益 PostgreSQL结构 多层逻辑结构 第一层:实例(xxx.xxx.xxx.xxx…...
【Spring Boot】配置实战指南:Properties与YML的深度对比与最佳实践
目录 1.前言 2.正文 2.1配置文件的格式 2.2properties 2.2.1基础语法 2.2.2value读取配置文件 2.2.3缺点 2.3yml 2.3.1基础语法 2.3.2配置不同数据类型 2.3.3配置读取 2.3.4配置对象和集合 2.3.5优缺点 2.4综合练习:验证码案例 2.4.1分析需求 2.4.2…...
算法优选系列(9.BFS 解决拓扑排序)
目录 拓扑排序简介: 编辑 课程表(medium): 课程表II(medium): 火星词典(hard): 拓扑排序简介: 有向无环图(DAG图) 如上图每条边…...
Java 17/18/19 新特性面试题)
(1)Java 17/18/19 新特性面试题
Java 17/18/19 新特性面试题 🚀 掌握前沿技术,成为顶尖 Java 工程师 1️⃣ Java 17/18/19 新特性价值点 👉 点击展开题目 Java 17/18/19新特性中,你认为最有价值的是哪些?请结合实际场景说明 密封类(Sealed Classes…...
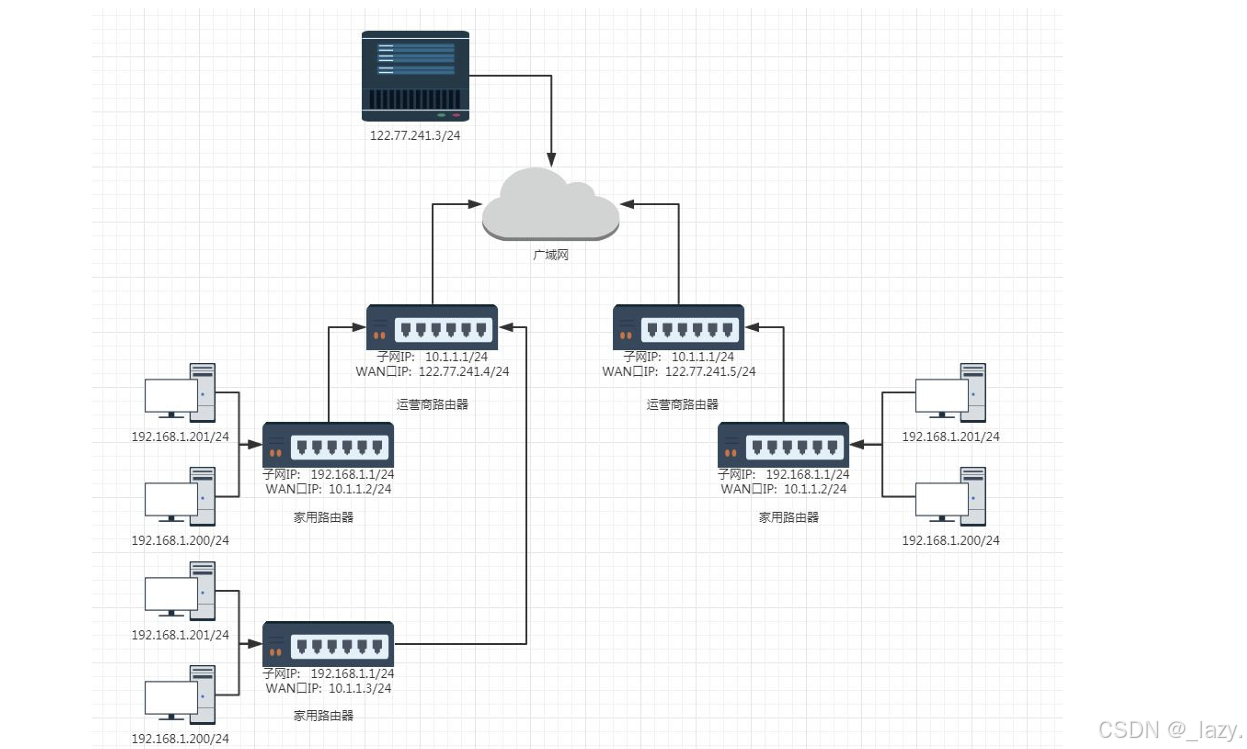
和WAN(广域网))
LAN(局域网)和WAN(广域网)
你的问题非常清晰!我来用一个直观的比喻实际拓扑图帮你彻底理解LAN(局域网)和WAN(广域网)如何协同工作,以及路由器在其中的位置。你可以把整个网络想象成一座城市: 1. 比喻:城市交通…...

【Java高阶面经:微服务篇】7. 1秒响应保障:超时控制如何成为高并发系统的“救火队长”?
一、全链路超时建模:从用户需求到系统分解 1.1 端到端时间预算分配 黄金公式: 用户期望响应时间 = 网络传输时间 + 服务处理时间 + 下游调用时间 + 缓冲时间典型分配策略(以1秒目标为例): 环节时间预算优化目标客户端渲染100ms骨架屏(Skeleton)预渲染边缘节点(CDN)…...
力扣周赛置换环的应用,最少交换次数
置换环的基本概念 置换环是排列组合中的一个概念,用于描述数组元素的重排过程。当我们需要将一个数组转换为另一个数组时,可以把这个转换过程分解为若干个 “环”。每个环代表一组元素的循环交换路径。 举个简单例子 假设原数组 A [3, 2, 1, 4]&…...
大语言模型 12 - 从0开始训练GPT 0.25B参数量 MiniMind2 补充 训练开销 训练步骤 知识蒸馏 LoRA等
写在前面 GPT(Generative Pre-trained Transformer)是目前最广泛应用的大语言模型架构之一,其强大的自然语言理解与生成能力背后,是一个庞大而精细的训练流程。本文将从宏观到微观,系统讲解GPT的训练过程,…...

hgdbv9创建plpython3u插件后无法使用该插件创建函数
文章目录 环境症状问题原因解决方案 环境 系统平台:银河麒麟 (X86_64) 版本:9.0 症状 此问题在如下版本和安装环境出现: 安装包: hgdb-ee-9.0.1.000-build2401091440-28098d3-linux.x86_64.binOS版本&…...
SQLMesh 宏操作符详解:@IF 的条件逻辑与高级应用
SQLMesh 的 IF 宏提供了一种在 SQL 查询中嵌入条件逻辑的方法,允许根据运行时条件动态调整查询结构。本文深入探讨 IF 的语法、使用场景及实际案例,帮助开发者构建更灵活、可维护的 SQL 工作流。 1. IF 宏简介 IF 是 SQLMesh 提供的条件逻辑宏ÿ…...

nt!MiRemovePageByColor函数分析之脱链和刷新颜色表
第0部分:背景 PFN_NUMBER FASTCALL MiRemoveZeroPage ( IN ULONG Color ) { ASSERT (Color < MmSecondaryColors); Page FreePagesByColor[Color].Flink; if (Page ! MM_EMPTY_LIST) { // // Remove the first entry on the zeroe…...
【爬虫】12306自动化购票
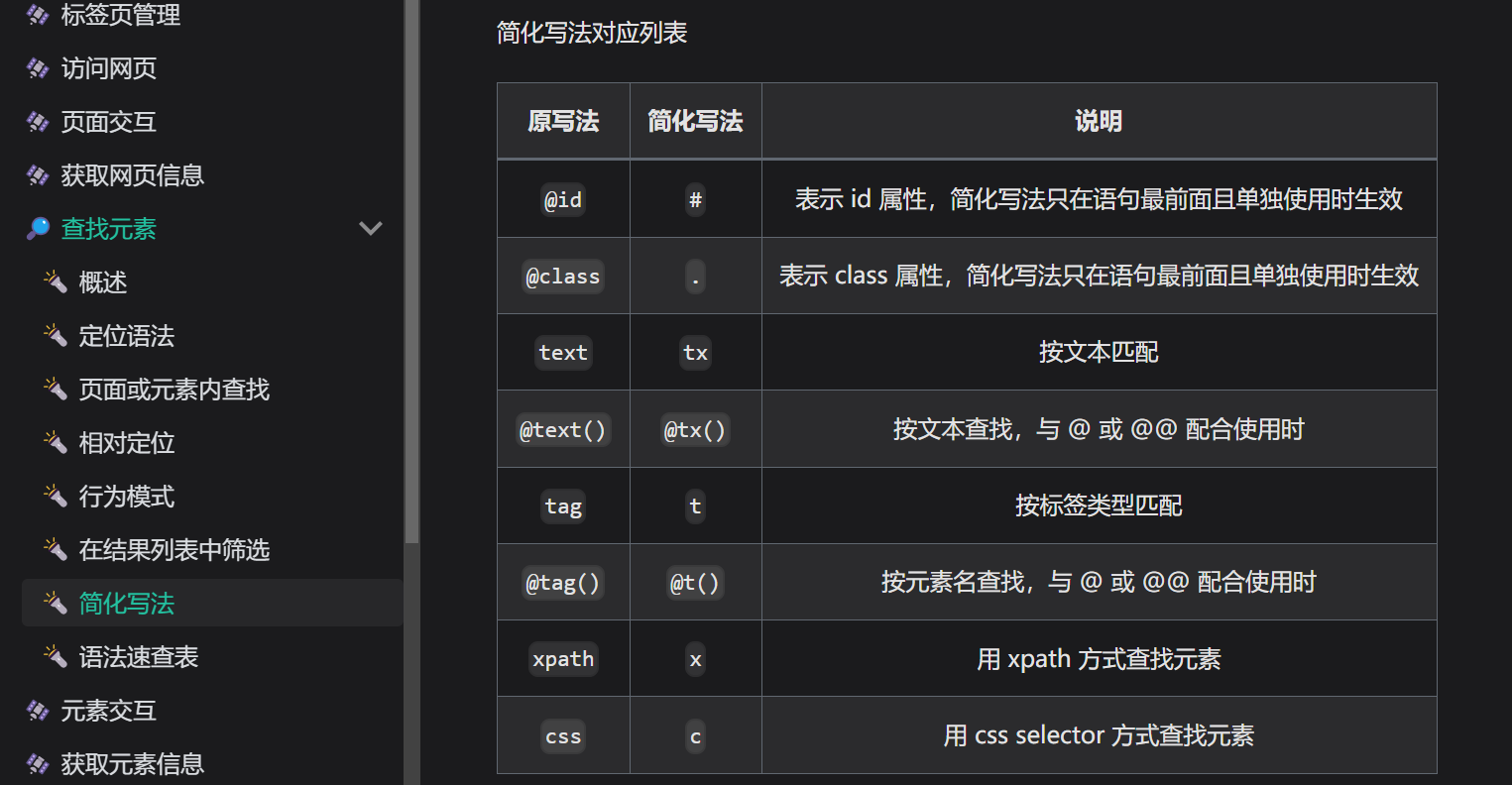
上文: 【爬虫】12306查票-CSDN博客 下面是简单的自动化进行抢票,只写到预定票,没有写完登陆, 跳出登陆后与上述代码同理修改即可。 感觉xpath最简单,复制粘贴: 还有很多写法: 官网地址&#…...

不同消息队列保证高可用实现方案
消息队列的高可用性(High Availability, HA)是分布式系统中的核心需求,不同消息队列通过多种技术手段实现高可用。以下是主流消息队列的高可用实现方案及对比: 一、Apache Kafka 副本机制(Replication) 每个…...
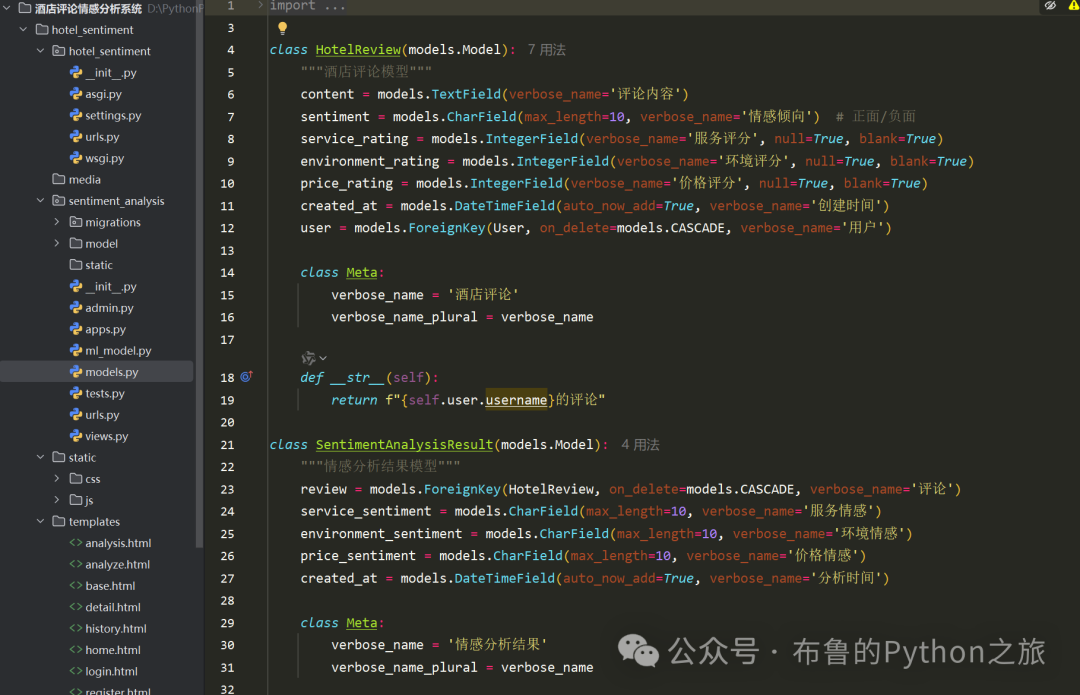
【Django系统】Python+Django携程酒店评论情感分析系统
Python Django携程酒店评论情感分析系统 项目概述 这是一个基于 Django 框架开发的酒店评论情感分析系统。系统使用机器学习技术对酒店评论进行情感分析,帮助酒店管理者了解客户反馈,提升服务质量。 主要功能 评论数据导入:支持导入酒店…...
spring cloud alibaba-Geteway详解
spring cloud alibaba-Gateway详解 Gateway介绍 在 Spring Cloud Alibaba 生态系统中,Gateway 是一个非常重要的组件,用于构建微服务架构中的网关服务。它基于 Spring Cloud Gateway 进行扩展和优化,提供了更强大的功能和更好的性能。 Gat…...
c#中添加visionpro控件(联合编程)
vs添加vp控件 创建窗体应用 右键选择项 点击确定 加载CogAcqfifoTool工具拍照 设置参数保存.vpp 保存为QuickBuild或者job, ToolBlock 加载保存的acq工具 实例化相机工具类 //引入命名空间 using Cognex.VisionPro; //实例化一个相机工具类 CogAcqFifoTool cogAcqFifoTool n…...
性能测试-mysql监控
mysql常用监控指标 慢查询sql 慢查询:指执行速度低于设置的阀值的sql语句 作用:帮助定位查询速度较慢的sql语句,方便更好的优化数据库系统的性能 开启mysql慢查询日志 参数说明: slow_query_log:慢查询日志开启状态【on…...

游戏引擎学习第301天:使用精灵边界进行排序
回顾并为今天的内容做准备 昨天,我们解决了一些关于排序的问题,这对我们清理长期存在的Z轴排序问题很有帮助。这个问题我们一直想在开始常规游戏代码之前解决。虽然不确定是否完全解决了问题,但我们提出了一个看起来合理的排序标准。 有两点…...
 函数详解)
CSS attr() 函数详解
attr() 是 CSS 中的一个函数,用于获取 HTML 元素的属性值并在样式中使用。虽然功能强大,但它的应用有一些限制和注意事项。 基本语法 element::pseudo-element {property: attr(attribute-name); } 可用场景 1. 在伪元素的 content 属性中使用&#…...
【AI生成PPT】使用ChatGPT+Overleaf自动生成学术论文PPT演示文稿
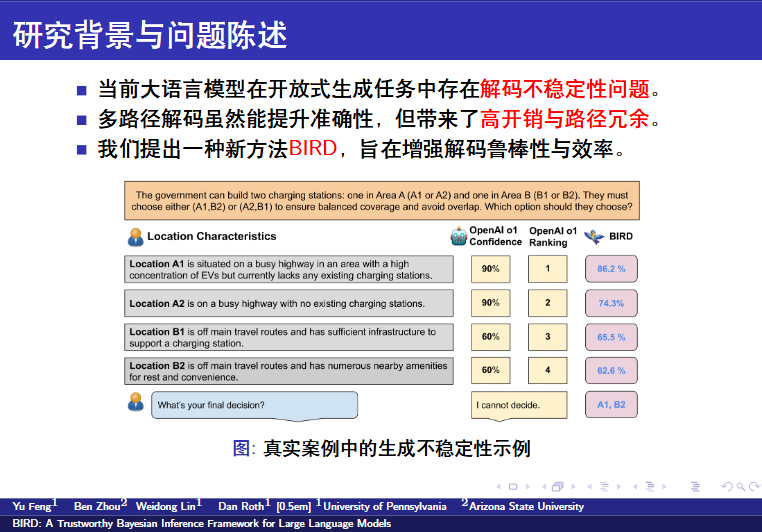
【AI生成PPT】使用ChatGPTOverleaf自动生成学术论文PPT演示文稿 文章摘要:使用ChatGPTBeamer自动生成学术论文PPT演示文稿Beamer是什么Overleaf编辑工具ChatGPT生成Beamer Latex代码论文获取prompt设计 生成结果 文章摘要: 本文介绍了一种高效利…...

流复备机断档处理
文章目录 环境症状问题原因解决方案 环境 系统平台:UOS(海光),UOS (飞腾),UOS(鲲鹏),UOS(龙芯),UOS (申威),银河麒麟svs(X86_64&…...

Linux 安装 pytorch+cuda+gpu 大模型开发环境过程记录
Linux 安装 pytorchcudagpu 大模型开发环境过程记录 2025-05-17 本文可用于生产环境,用于大模型训练开发运行。 1. 确定 OS 架构 # cat /etc/os-release NAME"Ubuntu" VERSION"20.04.6 LTS (Focal Fossa)" # uname -m x86_642. 查看磁盘空间…...

局部放大maya的视图HUD文字大小的方法
一、问题描述: 有网友问:有办法局部放大maya的字体吗比如hud中currenttime打开之后画面右下角有个frame 想放大一下能做到吗? 在 Maya 中,可以通过自定义 HUD(Heads-Up Display)元素的字体大小来局部放大特…...

数学复习笔记 16
前言 例题真是经典。 background music 《青春不一样》 2.28 算一个行列式,算出来行列式不等于零,这表示矩阵式可逆的。但是这个算的秩是复合的,感觉没啥好办法了,我直接硬算了,之后再看解析积累好的方法。算矩阵…...
初识Linux · NAT 内网穿透 内网打洞 代理
目录 前言: 内网穿透和打洞 NAPT表 内网穿透 内网打洞 正向/反向代理 前言: 本文算是网络原理的最后一点补充,为什么说是补充呢,因为我们在前面第一次介绍NAT的时候详细介绍的是报文从子网到公网,却没有介绍报文…...

STM32接收红外遥控器的遥控信号
经过几天早晨的学习,终于把遥控器的红外信号给搞通了,特此记录一下;其实说白了,红外遥控就是高低电平的信号,用时间来区分是二进制的0还是1;然后把这些0或1,在组装成一个32位的数基本就算是完事…...
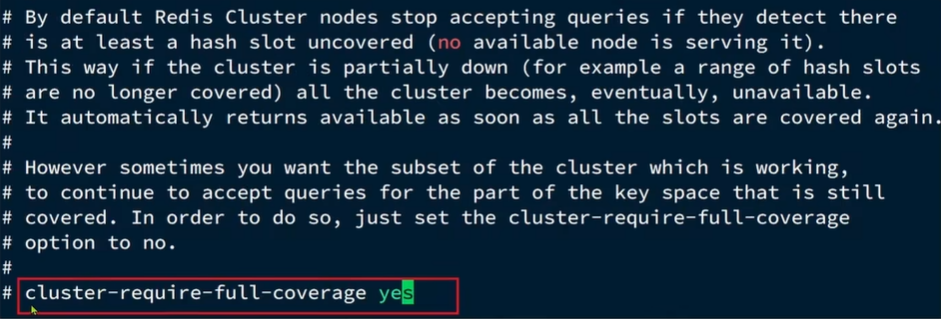
Redis从入门到实战 - 高级篇(下)
一、Redis键值设计 1. 优雅的key结构 Redis的Key虽然可以自定义,但最好遵循下面几个最佳实践约定: 遵循基本格式:[业务名称]:[数据名]:[id]长度不超过44字节不包含特殊字符 例如:我们的登录业务,保存用户信息&…...

NGINX常用功能—笔记
NGINX 是一款高性能的开源 Web 服务器和反向代理服务器,常用于处理高并发场景,其功能丰富且灵活。以下是 NGINX 的常用功能及详细说明: 一、静态资源服务器 功能说明:直接处理 HTML、CSS、JavaScript、图片、视频等静态文件请求&a…...