docker部署XTdrone
目录
一、前置准备
二、依赖安装
三、ros安装
四、gazebo安装
五、mavros安装
六、PX4的配置
七、Xtdrone源码下载
八、xtdrone与gazebo(实际上应该是第四步之后做这件事)
九、键盘控制
参考链接:仿真平台基础配置 · 语雀
一、前置准备
1.在docker创建ros-noetic环境,并实现gazebo和rviz可视化
参考:如何使用docker配置ros-noetic环境并使用rviz,gazebo_docker 获取 noetic-desktop-full-CSDN博客
二、依赖安装
sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python-pip python3-pip gawkpip3 install packaging numpy empy toml pyyaml jinja2 pyargparse三、ros安装
对于下载的docker,ros都是装好的,所以不用管
四、gazebo安装
Gazebo包括Gazebo本身和ROS的插件,需要分别安装。首先卸载之前的Gazebo
sudo apt-get remove gazebo*
sudo apt-get remove libgazebo*
sudo apt-get remove ros-noetic-gazebo* #kinetic noetic对应修改安装gazebo
1. 添加仓库
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
2. 加密钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3.更新库
sudo apt-get update
4.安装
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
对Gazebo的ROS插件做了修改,因此需要源码编译。
sudo apt-get install ros-noetic-moveit-msgs ros-noetic-object-recognition-msgs ros-noetic-octomap-msgs ros-noetic-camera-info-manager ros-noetic-control-toolbox ros-noetic-polled-camera ros-noetic-controller-manager ros-noetic-transmission-interface ros-noetic-joint-limits-interface模型文件的下载,通过前面的参考链接
将该附件解压缩后放在~/.gazebo中,此时在~/.gazebo/models/路径下可以看到很多模型。
五、mavros安装
sudo apt install ros-noetic-mavros ros-noetic-mavros-extras # for ros-noetic
sudo apt install ros-melodic-mavros ros-noetic-mavros-extras # for ros-noetic
wget https://gitee.com/robin_shaun/XTDrone/raw/master/sitl_config/mavros/install_geographiclib_datasets.shsudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh #这步需要装一段时间六、PX4的配置
下载上面参考链接给的PX4的压缩包,注意一定要把这个压缩包转移到docker里面再解压,否则会出奇怪的问题!!!
cd PX4_Firmware
make px4_sitl_default gazebo编译完成后,会弹出Gazebo界面,将其关闭即可。
修改 ~/.bashrc,加入以下代码,注意路径匹配,前两个source顺序不能颠倒。
source ~/catkin_ws/devel/setup.bash
source ~/PX4_Firmware/Tools/setup_gazebo.bash ~/PX4_Firmware/ ~/PX4_Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware/Tools/sitl_gazebosource ~/.bashrc然后运行如下命令,此时会启动Gazebo,如下图所示。
cd ~/PX4_Firmware
roslaunch px4 mavros_posix_sitl.launch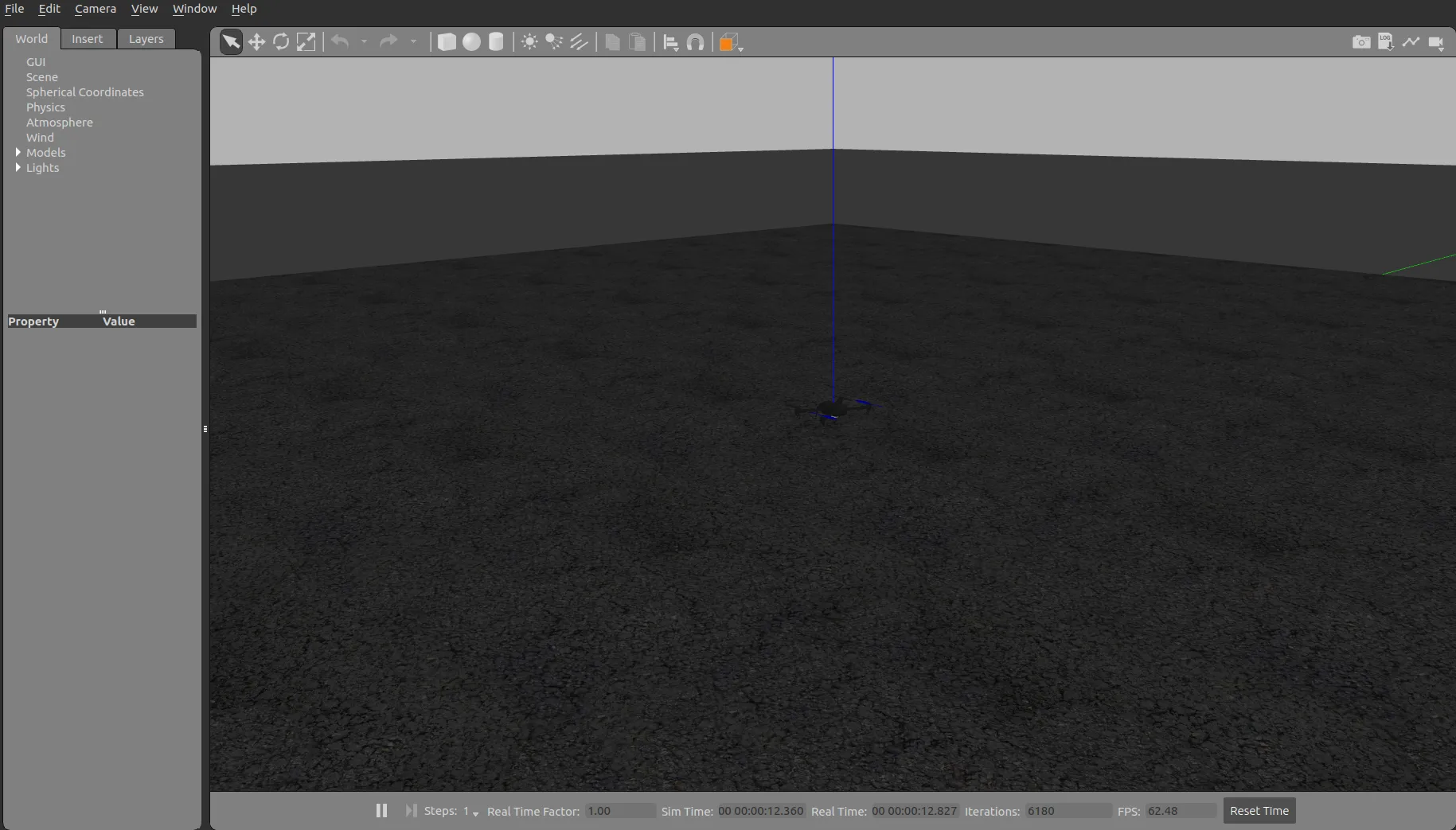
七、Xtdrone源码下载
git clone https://gitee.com/robin_shaun/XTDrone.git
cd XTDrone
git submodule update --init --recursive
cp sensing/gimbal/gazebo_gimbal_controller_plugin.cpp ~/PX4_Firmware/Tools/sitl_gazebo/src/
cp sitl_config/init.d-posix/rcS ~/PX4_Firmware/ROMFS/px4fmu_common/init.d-posix/
cp sitl_config/worlds/* ~/PX4_Firmware/Tools/sitl_gazebo/worlds/
cp -r sitl_config/models/* ~/PX4_Firmware/Tools/sitl_gazebo/models/
cp -r sitl_config/launch/* ~/PX4_Firmware/launch/
cd ~/.gazebo/models/
rm -r stereo_camera/ 3d_lidar/ 3d_gpu_lidar/ hokuyo_lidar/由于修改了PX4 sitl_gazebo中的gazebo_gimbal_controller_plugin.cpp(源代码不能控制多无人机的云台),要再编译一次。
cd ~/PX4_Firmware
make px4_sitl_default gazebo八、xtdrone与gazebo(实际上应该是第四步之后做这件事)
在第四部安装gazebo的时候,实际上需要将xtdrone的gazebo_ros_pkgs放到一个工作空间中
创建工作空间
mkdir -p ~/catkin_ws/src
mkdir -p ~/catkin_ws/scriptscatkin build将功能包放到工作空间后编译
cd ~/catkin_ws
cp -r ~/XTDrone/sitl_config/gazebo_ros_pkgs src/
catkin build #开发者测试使用catkin_make会出问题,因此建议使用catkin build九、键盘控制
在一个终端运行
cd ~/PX4_Firmware
roslaunch px4 indoor1.launchGazebo启动后,在另一个终端运行(注意要等Gazebo完全启动完成,或者可能脚本会报错)
cd ~/XTDrone/communication/
python multirotor_communication.py iris 0与0号iris建立通信后,在另一个终端运行
cd ~/XTDrone/control/keyboard
python multirotor_keyboard_control.py iris 1 vel具体怎么控制飞行的,参考视频,或者自己按着试试
第4讲:键盘控制代码精讲_哔哩哔哩_bilibili
相关文章:
docker部署XTdrone
目录 一、前置准备 二、依赖安装 三、ros安装 四、gazebo安装 五、mavros安装 六、PX4的配置 七、Xtdrone源码下载 八、xtdrone与gazebo(实际上应该是第四步之后做这件事) 九、键盘控制 参考链接:仿真平台基础配置 语雀 一、前置准…...
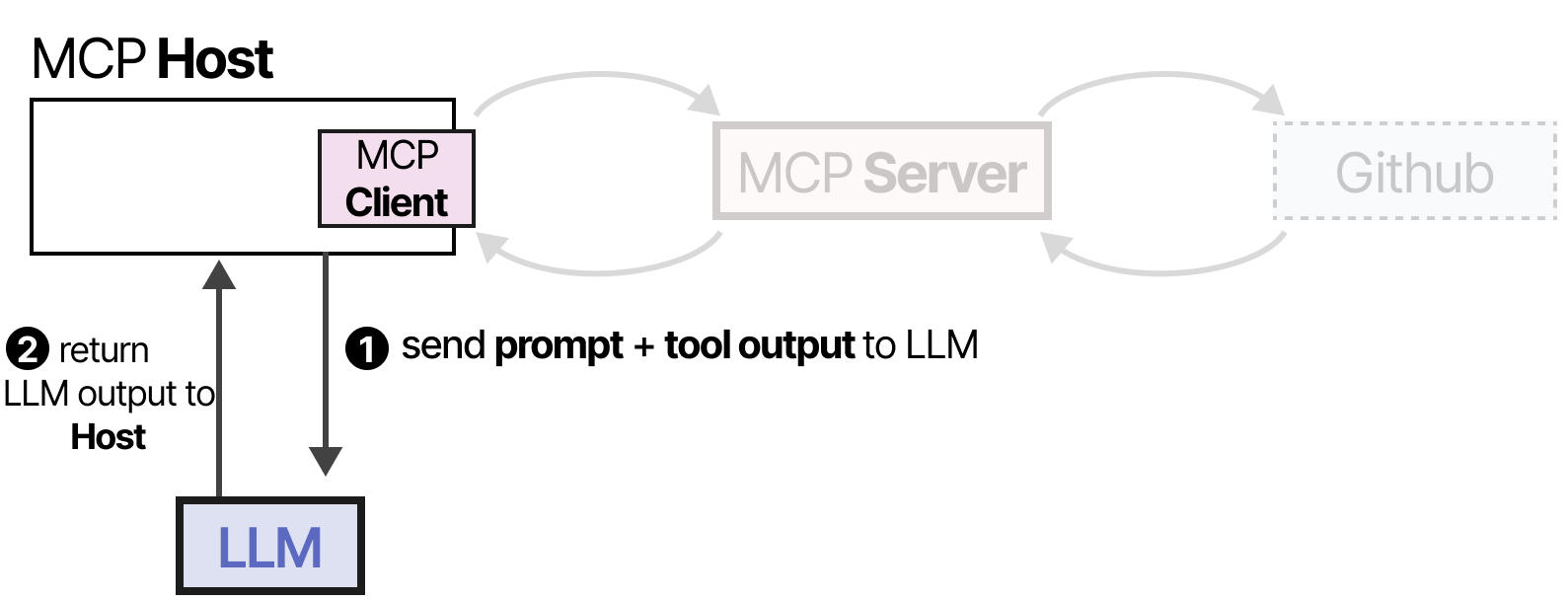
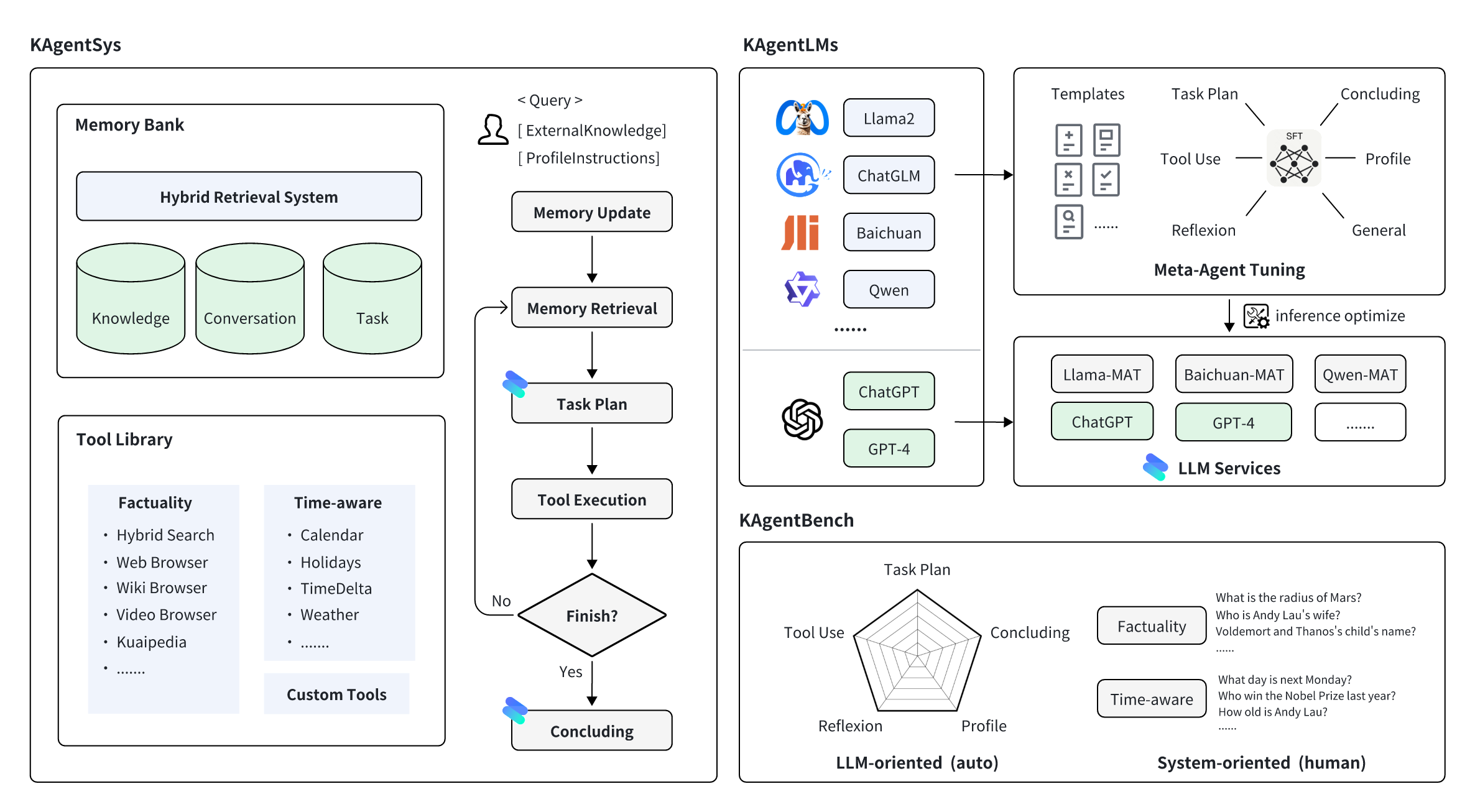
图解 | 大模型智能体LLM Agents
文章目录 正文1. 存储 Memory1.1 短期记忆 Short-Term Memory1.1.1 模型的上下文窗口1.1.2 对话历史1.1.3 总结对话历史 1.2 长期记忆Long-term Memory 2. 工具Tools2.1 工具的类型2.2 function calling2.3 Toolformer2.3.1 大模型调研工具的过程2.3.2 生成工具调用数据集 2.4 …...

Lambda表达式的方法引用详解
Lambda表达式的方法引用详解 1. 方法引用的概念与作用 定义:方法引用(Method Reference)是Lambda表达式的一种简化写法,允许直接通过方法名引用已有的方法。核心目的:减少冗余代码,提升可读性,尤其在Lambda仅调用一个现有方法时。语法符号:双冒号 ::。2. 方法引用的四种…...

echarts设置标线和最大值最小值
echarts设置标线和最大值最小值 基本ECharts图表初始化配置 设置动态的y轴范围(min/max值) 通过markPoint标记最大值和最小值点 使用markLine添加水平参考线 配置双y轴图表 自定义标记点和线的样式(颜色、符号等) 响应式调整图表大…...

gcc编译构建流程
0. 项目结构 /home/pi/test/ ├── src/ │ ├── add/ │ │ ├── add.cpp │ │ ├── add.h │ └── log/ │ ├── log.cpp │ ├── log.h │ ├── data.h ├── main.cppmain.cpp代码 // main.cpp #include "log.h&quo…...

Maven 中央仓库操作指南
Maven 中央仓库操作指南 登录注册 在 Maven Central 登录(注册)账号。 添加命名空间 注册 通过右上角用户菜单跳转到命名空间管理页面: 注册命名空间: 填入你拥有的域名并注册: 刚提交的命名空间状态是Unverified…...

BUUCTF——RCE ME
BUUCTF——RCE ME 进入靶场 <?php error_reporting(0); if(isset($_GET[code])){$code$_GET[code];if(strlen($code)>40){die("This is too Long.");}if(preg_match("/[A-Za-z0-9]/",$code)){die("NO.");}eval($code); } else{highlight…...

clickhouse-1-特性及docker化安装
clickhouse-1-特性及docker化安装 1.核心特性1.1.列式存储与高效压缩1.2.向量化执行引擎1.3.分布式架构与高可用性1.4.多样化的表引擎1.5.实时处理能力2.安装2.1 拉取镜像2.2 创建容器3.连接4.使用4.1.创建数据库5.其他5.1 primary key5.2 ENG…...

Docker核心笔记
一、概述 1、架构 Docker容器基于镜像运行,容器共享宿主机的内核,不会加载额外内核,通过Namespaces(环境隔离)和Cgroups(资源控制)实现隔离,Cgroups会限容器使用资源并控制优先级和统计数据。隔离后的容器仅包含应用所需的用户态依赖 2、安装 安装先卸载再安装,使用的yum…...

log日志最佳实践
log日志最佳实践 1、占位符的使用2、延迟计算 1、占位符的使用 在进行日志打印的时候,推荐使用占位符进行字符串打印,而不是直接使用字符串拼接。原因: 这样可以避免不必要的字符串拼接。使用占位符时,实际字符串拼接由日志框架…...

FreeRTOS--消息队列
一、简介 消息队列是FreeRTOS中用于任务与任务或任务与中断之间数据交换的一种机制,采用FIFO(先进先出)方式管理数据,也可以采用LIFO(后进先出)方式。有点类似全局变量。 1.1 那为什么不直接使用全局变量&a…...
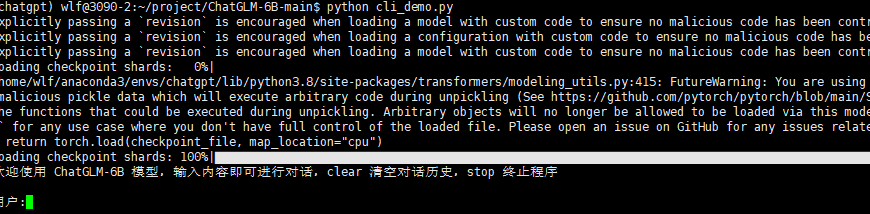
三步快速部署一个本地Windows/Linux大语言模型ChatGLM(环境配置+权重下载+运行)
前言: 最近刚拿到实验室一个装了3张3090显卡的服务器账号,感觉不用来霍霍有点浪费,于是有了部署一个大语言模型的想法,除去下载权重和传文件到服务器上可能也就用了十分钟不到(这下看懂为啥python受众现在这么广了&…...

深入解析Spring Boot与Redis的缓存集成实践
深入解析Spring Boot与Redis的缓存集成实践 引言 在现代Web应用开发中,缓存技术是提升系统性能的重要手段之一。Redis作为一种高性能的内存数据库,广泛应用于缓存场景。本文将详细介绍如何在Spring Boot项目中集成Redis,并探讨其在实际开发…...

leetcode105.从中序与前序遍历序列构造二叉树:前序定根与中序分治的递归重建术
一、题目深度解析与核心挑战 在二叉树的重建问题中,"从中序与前序遍历序列构造二叉树"是一道考察递归分治思想的经典题目。题目要求我们根据一棵二叉树的前序遍历序列和中序遍历序列,重建出该二叉树的原始结构。这道题的核心难点在于如何利用…...

Python二级考试
目录 一、核心知识模块 1. 程序结构 2. 循环结构 3. 组合数据类型 4. 函数与模块 二、重点算法 1. 排序算法 2. 查找算法 三、文件操作 1. 基础文件处理 四、备考建议 五、典型易错点 以下是Python二级考试的复习要点整理,分为知识模块和备考建议&#…...
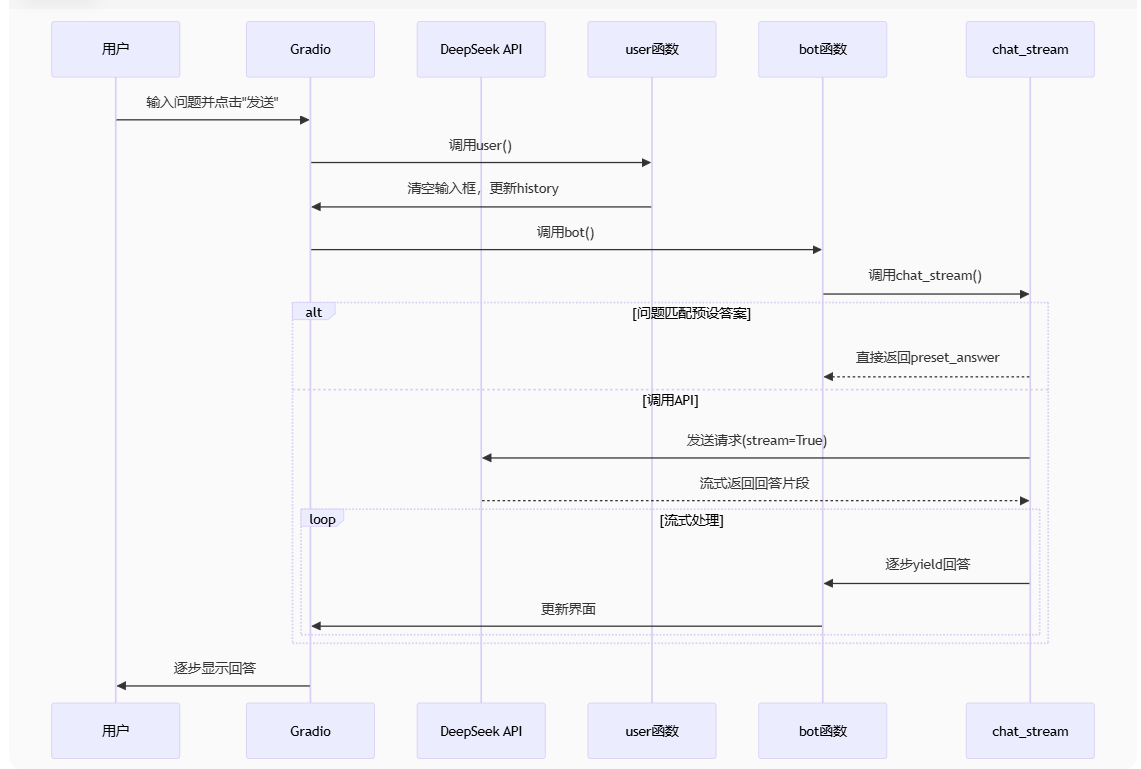
DeepSeek联网Google搜索引擎
目录: 1、使用背景2、实现代码3、Gradio 的 yield 机制 1、使用背景 比如所有易建联是什么时候退役的?使用大模型对这种实事回答不准确,需要通过联网搜索处理。 正确答案应该是2023年8月29日退役。 2、实现代码 # import gradio as gr# d…...
时,经典理论失效?)
理论物理:为什么在极低温(接近绝对零度)时,经典理论失效?
经典理论应该是指经典力学和经典统计物理吧,比如牛顿力学、麦克斯韦-玻尔兹曼分布这些。而到了接近绝对零度的时候,物质的状态会发生什么变化呢?比如说超流性、超导性,或者玻色-爱因斯坦凝聚这些现象,这些在经典理论里好像没法解释。 因为在极低温下,粒子的热运动减弱,…...

奈雪小程序任务脚本
功能概述 该脚本用于自动完成奈雪点单小程序的每日任务,包括: 自动检测 Token 有效性自动签到(如果未签到)获取用户基础信息(昵称、手机号)查询当前奈雪币余额记录连续签到天数支持多账号执行,…...

上海医日健集团物联网专利技术领跑智慧药房赛道
在智慧医疗蓬勃发展的浪潮中,上海医日健集团凭借其卓越的创新能力与强大的技术实力,在智慧药房领域崭露头角。集团自主研发的物联网专利技术,正以前所未有的优势,重塑智慧药房运营模式,引领行业迈向新的发展高度。 上…...
基于Java+MySQL实现(Web)图书借阅管理系统
图书借阅管理系统(前后台) 1 需求分析 图书借阅管理系统是模拟学校图书馆实现的一个具有前后台的 Web 系统.对于读者,能够提供全文检索,个性化推荐,借阅等功能.对于管理员,能够提供可视化数据分析,信息管理等功能. 2 技术栈 前端: Layui,jQuery,echarts 后端:Spring Boot,…...
SAR ADC的功耗设计
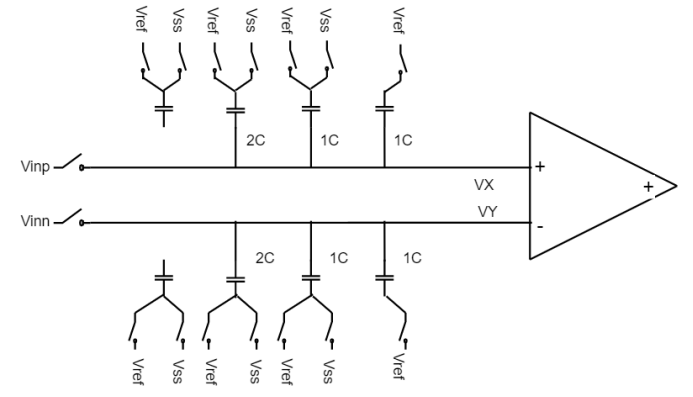
SAR ADC 由比较器、逻辑和DAC组成,功耗比可能是3:6:1,对于低功耗设计来说,我们需要尽量让DAC的功耗最小,这里来探讨一下CDAC的功耗计算方法。 CDAC从状态1切换到状态2时,需要从Vref buffer上抽拉电荷。C是状态2时连接Vref的总电容,V2就是状态2时接Vref的电容上的电压…...
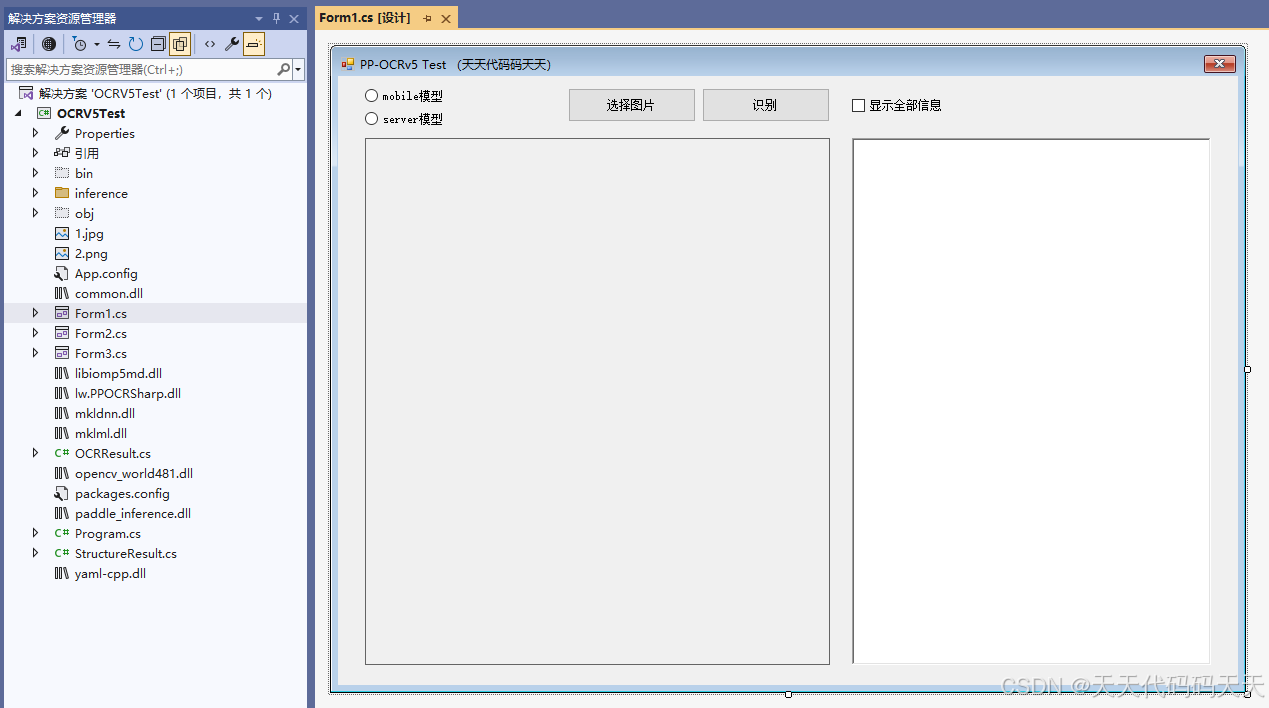
PP-OCRv5
目录 PP-OCRv5官方效果如下 C封装、C#调用效果 项目 代码 下载 PP-OCRv5官方效果如下 C封装、C#调用效果 项目 代码 using Newtonsoft.Json; using OpenCvSharp; using System; using System.Collections.Generic; using System.Diagnostics; using System.Drawing; usi…...
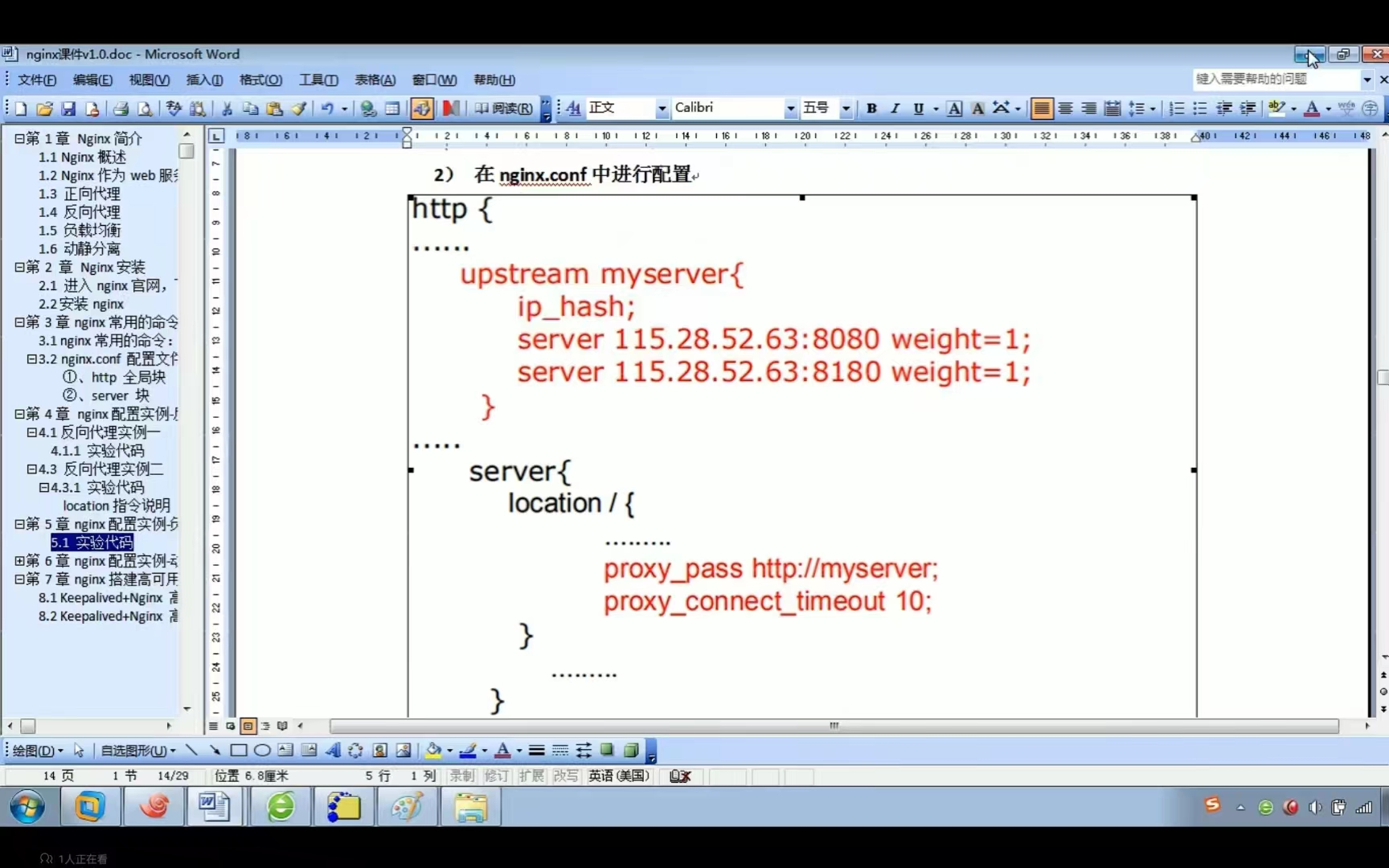
nginx的一些配置的意思
1.用这个端口可以访问到nginx 2.工作进程,设置成和cpu核心数一样即可 3.每个工作进程的最大网络连接数。 4.主机名称 设置反向代理时,把server_name设置成ip。 5.反向代理进行转发,localhost指的是nginx所在的机器。 关键字proxy_pass。 …...
Agent模型微调
这篇文章讲解: 把 Agent 和 Fine-Tuning 的知识串起来,在更高的技术视角看大模型应用;加深对 Agent 工作原理的理解;加深对 Fine-Tuning 训练数据处理的理解。 1. 认识大模型 Agent 1.1 大模型 Agent 的应用场景 揭秘Agent核心…...

Android-OkHttp与Retrofit学习总结
OkHttp核心机制与工作流程 面试官:能简单介绍一下OkHttp的工作流程吗? 候选人: 好的,OkHttp的工作流程大致可以分为几个步骤。首先,我们需要创建一个OkHttpClient实例,通常会用建造者模式来配置…...

移远三款主流5G模块RM500U,RM520N,RG200U比较
文章目录 概要一、技术架构差异1. 3GPP协议版本2. 芯片平台与性能3. 频段覆盖与区域适配4. 协议增强与特殊功能 二、功能与应用定位1. 网络兼容性2. 封装与接口扩展 三、典型应用场景总结 概要 本文介绍下移远两款主流5G模块RM500U RM520N RG200U。 一…...

C++引用以及和指针的区别
C++ 引用 引用(reference)是 C++ 中的一种变量类型,是另一个变量的别名。一旦引用被初始化,就不能再改变它所指向的对象。 引用的特点 必须初始化:声明引用时必须立即对其进行初始化。不可更改绑定:一旦引用绑定到某个变量,就不能再指向其他变量。语法简洁:使用引用不…...

firfox 国外版和国内版本账号不互通问题处理
https://blog.csdn.net/sinat_37891718/article/details/147445621 现在国际服的火狐浏览器修改使用国内的账号服务器,需要先在搜索框输入about:config 中改变三项配置,然后重启浏览器,才能正常使用国内的火狐账号服务器 identity.fxaccount…...
Linux基本指令篇 —— whoami指令
whoami 是 Linux 和 Unix 系统中一个简单但实用的命令,全称 Who Am I(我是谁)。它的功能是显示当前登录用户的用户名。以下是关于 whoami 的详细解析: 目录 1. 基本用法 2. 命令特点 3. 实际应用场景 场景 1:脚本中…...
--异步调用+多路复用实现)
用go从零构建写一个RPC(3)--异步调用+多路复用实现
在前两个版本中,我们实现了基础的客户端-服务端通信、连接池、序列化等关键模块。为了进一步提升吞吐量和并发性能,本版本新增了 异步发送机制 和 多路复用支持,旨在减少资源消耗、提升连接利用率。 代码地址:https://github.com/…...