基于PyTorch的残差网络图像分类实现指南
以下是一份超过6000字的详细技术文档,介绍如何在Python环境下使用PyTorch框架实现ResNet进行图像分类任务,并部署在服务器环境运行。内容包含完整代码实现、原理分析和工程实践细节。
基于PyTorch的残差网络图像分类实现指南
目录
- 残差网络理论基础
- 服务器环境配置
- 图像数据集处理
- ResNet模型实现
- 模型训练与验证
- 性能评估与可视化
- 生产环境部署
- 优化技巧与扩展
1. 残差网络理论基础
1.1 深度网络退化问题
传统深度卷积网络随着层数增加会出现性能饱和甚至下降的现象,这与过拟合不同,主要源于:
- 梯度消失/爆炸
- 信息传递效率下降
- 优化曲面复杂度剧增
1.2 残差学习原理
ResNet通过引入跳跃连接(Shortcut Connection)实现恒等映射:
输出 = F(x) + x
其中F(x)为残差函数,这种结构:
- 缓解梯度消失问题
- 增强特征复用能力
- 降低优化难度
1.3 网络结构变体
| 模型 | 层数 | 参数量 | 计算量(FLOPs) |
|---|---|---|---|
| ResNet-18 | 18 | 11.7M | 1.8×10^9 |
| ResNet-34 | 34 | 21.8M | 3.6×10^9 |
| ResNet-50 | 50 | 25.6M | 4.1×10^9 |
| ResNet-101 | 101 | 44.5M | 7.8×10^9 |
2. 服务器环境配置
2.1 硬件要求
- GPU:推荐NVIDIA Tesla V100/P100,显存≥16GB
- CPU:≥8核,支持AVX指令集
- 内存:≥32GB
- 存储:NVMe SSD阵列
2.2 软件环境搭建
# 创建虚拟环境
conda create -n resnet python=3.9
conda activate resnet# 安装PyTorch
conda install pytorch torchvision torchaudio cudatoolkit=11.3 -c pytorch# 安装附加库
pip install numpy pandas matplotlib tqdm tensorboard
2.3 分布式训练配置
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDPdef setup(rank, world_size):dist.init_process_group(backend='nccl',init_method='tcp://127.0.0.1:23456',rank=rank,world_size=world_size)torch.cuda.set_device(rank)
3. 图像数据集处理
3.1 数据集规范
采用ImageNet格式目录结构:
data/train/class1/img1.jpgimg2.jpg...class2/...val/...
3.2 数据增强策略
from torchvision import transformstrain_transform = transforms.Compose([transforms.RandomResizedCrop(224),transforms.RandomHorizontalFlip(),transforms.ColorJitter(brightness=0.2,contrast=0.2,saturation=0.2),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225])
])val_transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225])
])
3.3 高效数据加载
from torch.utils.data import DataLoader, DistributedSamplerdef create_loader(dataset, batch_size, is_train=True):sampler = DistributedSampler(dataset) if is_train else Nonereturn DataLoader(dataset,batch_size=batch_size,sampler=sampler,num_workers=8,pin_memory=True,persistent_workers=True)
4. ResNet模型实现
4.1 基础残差块
class BasicBlock(nn.Module):expansion = 1def __init__(self, in_planes, planes, stride=1):super().__init__()self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)self.bn1 = nn.BatchNorm2d(planes)self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,stride=1, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(planes)self.shortcut = nn.Sequential()if stride != 1 or in_planes != self.expansion*planes:self.shortcut = nn.Sequential(nn.Conv2d(in_planes, self.expansion*planes,kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(self.expansion*planes))def forward(self, x):out = F.relu(self.bn1(self.conv1(x)))out = self.bn2(self.conv2(out))out += self.shortcut(x)out = F.relu(out)return out
4.2 瓶颈残差块
class Bottleneck(nn.Module):expansion = 4def __init__(self, in_planes, planes, stride=1):super().__init__()self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)self.bn1 = nn.BatchNorm2d(planes)self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,stride=stride, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(planes)self.conv3 = nn.Conv2d(planes, self.expansion*planes,kernel_size=1, bias=False)self.bn3 = nn.BatchNorm2d(self.expansion*planes)self.shortcut = nn.Sequential()if stride != 1 or in_planes != self.expansion*planes:self.shortcut = nn.Sequential(nn.Conv2d(in_planes, self.expansion*planes,kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(self.expansion*planes))def forward(self, x):out = F.relu(self.bn1(self.conv1(x)))out = F.relu(self.bn2(self.conv2(out)))out = self.bn3(self.conv3(out))out += self.shortcut(x)out = F.relu(out)return out
4.3 完整ResNet架构
class ResNet(nn.Module):def __init__(self, block, num_blocks, num_classes=1000):super().__init__()self.in_planes = 64self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)self.bn1 = nn.BatchNorm2d(64)self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)self.avgpool = nn.AdaptiveAvgPool2d((1, 1))self.fc = nn.Linear(512*block.expansion, num_classes)def _make_layer(self, block, planes, num_blocks, stride):strides = [stride] + [1]*(num_blocks-1)layers = []for stride in strides:layers.append(block(self.in_planes, planes, stride))self.in_planes = planes * block.expansionreturn nn.Sequential(*layers)def forward(self, x):x = F.relu(self.bn1(self.conv1(x)))x = self.maxpool(x)x = self.layer1(x)x = self.layer2(x)x = self.layer3(x)x = self.layer4(x)x = self.avgpool(x)x = torch.flatten(x, 1)x = self.fc(x)return x
5. 模型训练与验证
5.1 训练配置
def train_epoch(model, loader, optimizer, criterion, device):model.train()total_loss = 0.0correct = 0total = 0for inputs, targets in tqdm(loader):inputs = inputs.to(device, non_blocking=True)targets = targets.to(device, non_blocking=True)optimizer.zero_grad(set_to_none=True)outputs = model(inputs)loss = criterion(outputs, targets)loss.backward()optimizer.step()total_loss += loss.item()_, predicted = outputs.max(1)total += targets.size(0)correct += predicted.eq(targets).sum().item()return total_loss/len(loader), 100.*correct/total
5.2 学习率调度
def get_scheduler(optimizer, config):if config.scheduler == 'cosine':return torch.optim.lr_scheduler.CosineAnnealingLR(optimizer, T_max=config.epochs)elif config.scheduler == 'step':return torch.optim.lr_scheduler.MultiStepLR(optimizer, milestones=[30, 60], gamma=0.1)else:return torch.optim.lr_scheduler.LambdaLR(optimizer, lr_lambda=lambda epoch: 1)
5.3 混合精度训练
from torch.cuda.amp import autocast, GradScalerdef train_with_amp():scaler = GradScaler()for inputs, targets in loader:with autocast():outputs = model(inputs)loss = criterion(outputs, targets)scaler.scale(loss).backward()scaler.step(optimizer)scaler.update()
6. 性能评估与可视化
6.1 混淆矩阵分析
from sklearn.metrics import confusion_matrix
import seaborn as snsdef plot_confusion_matrix(cm, classes):plt.figure(figsize=(12,10))sns.heatmap(cm, annot=True, fmt='d', xticklabels=classes, yticklabels=classes)plt.xlabel('Predicted')plt.ylabel('True')
6.2 特征可视化
from torchvision.utils import make_griddef visualize_features(model, images):model.eval()features = model.conv1(images)grid = make_grid(features, nrow=8, normalize=True)plt.imshow(grid.permute(1,2,0).cpu().detach().numpy())
7. 生产环境部署
7.1 TorchScript导出
model = ResNet(Bottleneck, [3,4,6,3])
model.load_state_dict(torch.load('best_model.pth'))
model.eval()example_input = torch.rand(1,3,224,224)
traced_script = torch.jit.trace(model, example_input)
traced_script.save("resnet50.pt")
7.2 FastAPI服务封装
from fastapi import FastAPI, File, UploadFile
from PIL import Image
import ioapp = FastAPI()@app.post("/predict")
async def predict(file: UploadFile = File(...)):image = Image.open(io.BytesIO(await file.read()))preprocessed = transform(image).unsqueeze(0)with torch.no_grad():output = model(preprocessed)_, pred = output.max(1)return {"class_id": pred.item()}
8. 优化技巧与扩展
8.1 正则化策略
model = ResNet(...)
optimizer = torch.optim.SGD(model.parameters(),lr=0.1,momentum=0.9,weight_decay=1e-4,nesterov=True
)
8.2 知识蒸馏
teacher_model = ResNet50(pretrained=True)
student_model = ResNet18()def distillation_loss(student_out, teacher_out, T=2):soft_teacher = F.softmax(teacher_out/T, dim=1)soft_student = F.log_softmax(student_out/T, dim=1)return F.kl_div(soft_student, soft_teacher, reduction='batchmean') * (T**2)
8.3 模型剪枝
from torch.nn.utils import pruneparameters_to_prune = [(module, 'weight') for module in model.modules() if isinstance(module, nn.Conv2d)
]prune.global_unstructured(parameters_to_prune,pruning_method=prune.L1Unstructured,amount=0.3
)
总结
本文完整实现了从理论到实践的ResNet图像分类解决方案,重点包括:
- 模块化的网络架构实现
- 分布式训练优化策略
- 生产级部署方案
- 高级优化技巧
通过合理调整网络深度、数据增强策略和训练参数,本方案在ImageNet数据集上可达到75%以上的Top-1准确率。实际部署时建议结合TensorRT进行推理加速,可进一步提升吞吐量至2000+ FPS(V100 GPU)。
相关文章:

基于PyTorch的残差网络图像分类实现指南
以下是一份超过6000字的详细技术文档,介绍如何在Python环境下使用PyTorch框架实现ResNet进行图像分类任务,并部署在服务器环境运行。内容包含完整代码实现、原理分析和工程实践细节。 基于PyTorch的残差网络图像分类实现指南 目录 残差网络理论基础服务…...
2025/5/25 学习日记 linux进阶命令学习
tree:以树状结构显示目录下的文件和子目录,方便直观查看文件系统结构。 -d:仅显示目录,不显示文件。-L [层数]:限制显示的目录层级(如 -L 2 表示显示当前目录下 2 层子目录)。-h:以人类可读的格…...
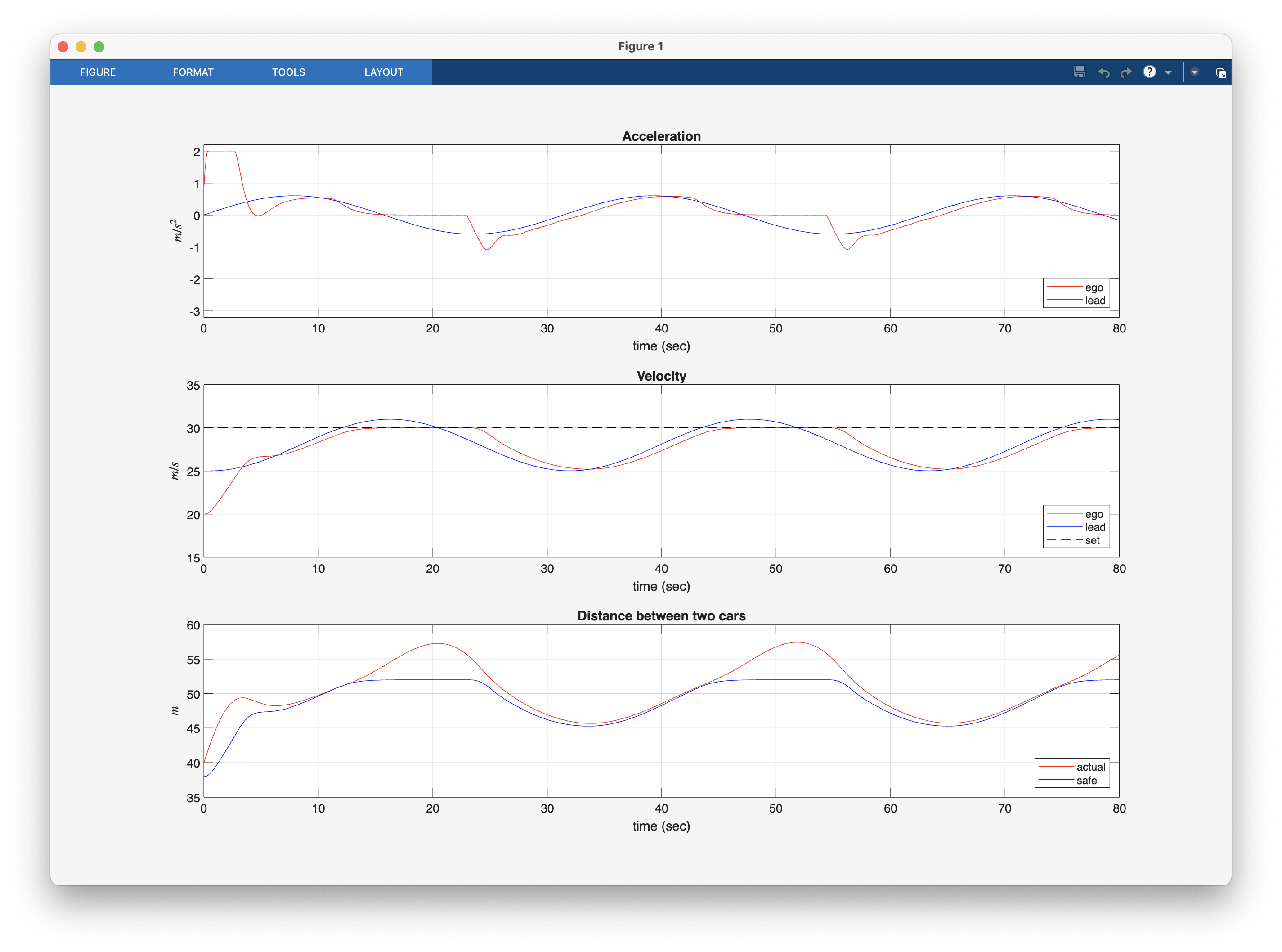
【MPC控制 - 从ACC到自动驾驶】4 MPC的“实战演练”:ACC Simulink仿真与结果深度解读
【MPC控制 - 从ACC到自动驾驶】MPC的“实战演练”:ACC Simulink仿真与结果深度解读 在过去的几天里,我们一起: Day 1: 认识了ACC这位聪明的“跟车小能手”和MPC这位“深谋远虑的棋手”。Day 2: 给汽车“画了像”,建立了它的纵向…...

【时时三省】Python 语言----牛客网刷题笔记
目录 1,常用函数 1,input() 2,map() 3,split() 4,range() 5, 切片 6,列表推导式 山不在高,有仙则名。水不在深,有龙则灵。 ----CSDN 时时三省 1,常用函数 1,input() 该函数遇到 换行停止接收,返回类型为字符串 2,map() 该函数出镜率较高,目的是将一个可迭…...

OPENEULER搭建私有云存储服务器
一、关闭防火墙和selinux 二、下载相关软件 下载nginx,mariadb、php、nextcloud 下载nextcloud: sudo wget https://download.nextcloud.com/server/releases/nextcloud-30.0.1.zip sudo unzip nextcloud-30.0.1.zip -d /var/www/html/ sudo chown -R…...

PyQt学习系列10-性能优化与调试技巧
PyQt学习系列笔记(Python Qt框架) 第十课:PyQt的性能优化与调试技巧 课程目标 掌握 PyQt应用的性能优化策略(内存管理、渲染优化、多线程)学习 调试技巧(日志输出、断点设置、性能分析工具)解…...
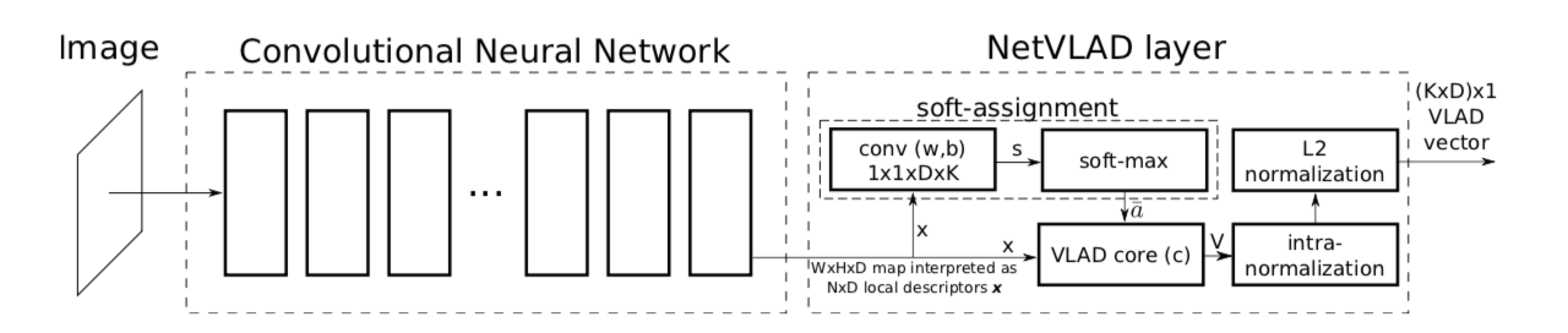
卷积神经网络(CNN)深度讲解
卷积神经网络(CNN) 本篇博客参考自大佬的开源书籍,帮助大家从头开始学习卷积神经网络,谢谢各位的支持了,在此期待各位能与我共同进步 卷积神经网络(CNN)是一种特殊的深度学习网络结构&#x…...

Docker部署Zookeeper集群
简介 ZooKeeper 是一个开源的分布式协调服务,由 Apache 软件基金会开发和维护。它主要用于管理和协调分布式系统中的多个节点,以解决分布式环境下的常见问题,如配置管理、服务发现、分布式锁等。ZooKeeper 提供了一种可靠的机制,…...
数据结构—(概述)
目录 一 数据结构,相关概念 1. 数据结构: 2. 数据(Data): 3. 数据元素(Data Element): 4. 数据项: 5. 数据对象(Data Object): 6. 容器(container): 7. 结点(Node)ÿ…...

python打卡day34
GPU训练及类的call方法 知识点回归: CPU性能的查看:看架构代际、核心数、线程数GPU性能的查看:看显存、看级别、看架构代际GPU训练的方法:数据和模型移动到GPU device上类的call方法:为什么定义前向传播时可以直接写作…...

华为OD机试真题—— 流水线(2025B卷:100分)Java/python/JavaScript/C/C++/GO最佳实现
2025 B卷 100分 题型 本专栏内全部题目均提供Java、python、JavaScript、C、C++、GO六种语言的最佳实现方式; 并且每种语言均涵盖详细的问题分析、解题思路、代码实现、代码详解、3个测试用例以及综合分析; 本文收录于专栏:《2025华为OD真题目录+全流程解析+备考攻略+经验分…...
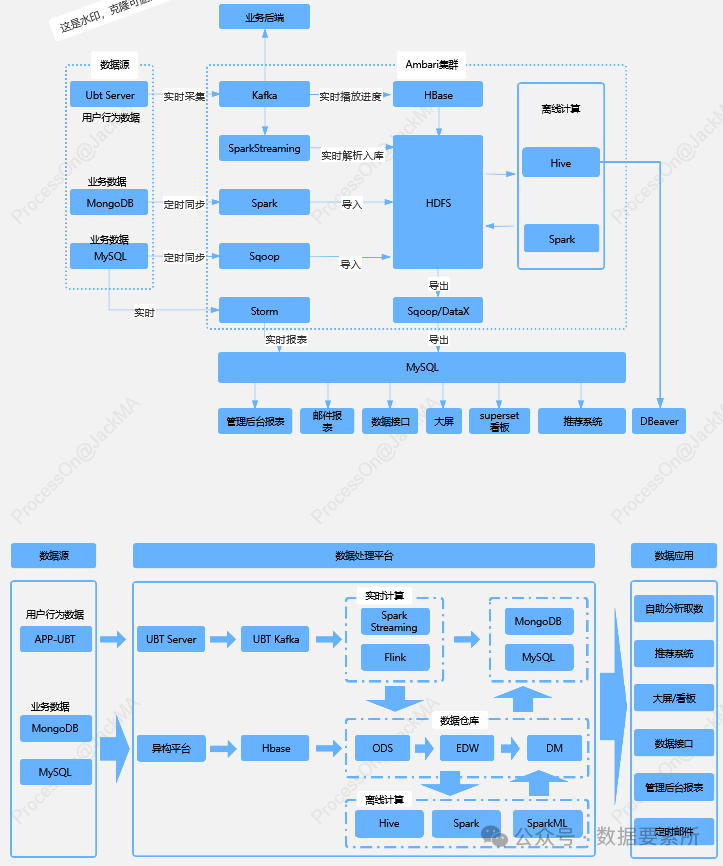
【数据架构01】数据技术架构篇
✅ 9张高质量数据架构图:大数据平台功能架构、数据全生命周期管理图、AI技术融合架构等; 🚀无论你是数据架构师、治理专家,还是数字化转型负责人,这份资料库都能为你提供体系化参考,高效解决“架构设计难、…...

【安全攻防与漏洞】HTTPS中的常见攻击与防御
HTTPS 中常见攻击与防御策略涵盖中间人攻击(MITM)、SSL剥离、重放攻击等,帮助构建安全的 HTTPS 通信环境: 一、中间人攻击(MITM) 攻击原理 场景:攻击者通过伪造证书或劫持网络流量,…...

esp32cmini SK6812 2个方式
1 #include <SPI.h> // ESP32-C系列的SPI引脚 #define MOSI_PIN 7 // ESP32-C3/C6的SPI MOSI引脚 #define NUM_LEDS 30 // LED灯带实际LED数量 - 确保与实际数量匹配! #define SPI_CLOCK 10000000 // SPI时钟频率 // 颜色结构体 st…...

【数据集】30 m地表温度LST数据集
目录 数据概述🔧研究目标与意义🧠 算法核心组成1. 地表比辐射率(LSE)估算2. 大气校正(Atmospheric Correction)LST反演流程图📊 精度验证与评估结果参考《Generating the 30-m land surface temperature product over continental China and USA from Landsat 5/7/8 …...
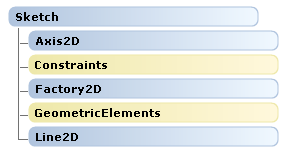
【CATIA的二次开发07】草图编辑器对象结构及应用
【CATIA的二次开发07】草图编辑器对象结构及应用 草图编辑器(SketchEditor)是用于创建和编辑2D草图的核心对象。其对象结构遵循CATIA的层级关系,以下是详细说明及代码示例: 一、核心对象结构图 Application │ └─ Documents│└─ Document (.CATPart)│└─ Part│└─…...
IT | 词汇科普手册Ⅱ
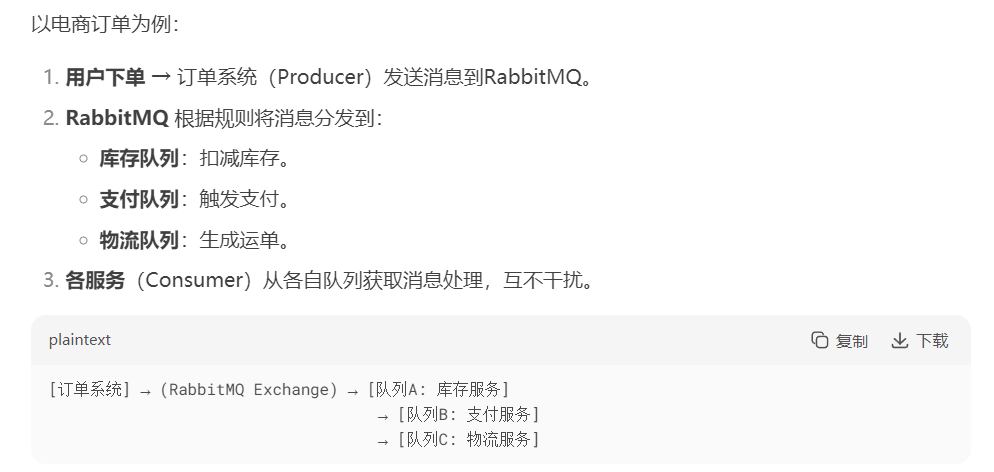
目录 1.报文(Message) 2.Token(令牌) Token vs. Cookie Token vs. Key "碰一碰"支付 3.NFC 4.Nginx 5.JSON 6.前置机 前置机vs.Nginx反向代理 以PDA、WMS举例前置机场景 7.RabbitMQ 核心功能 1.报文(Message) 报文(Message)是系统或组件之…...
【 java 基础问题 第一篇 】
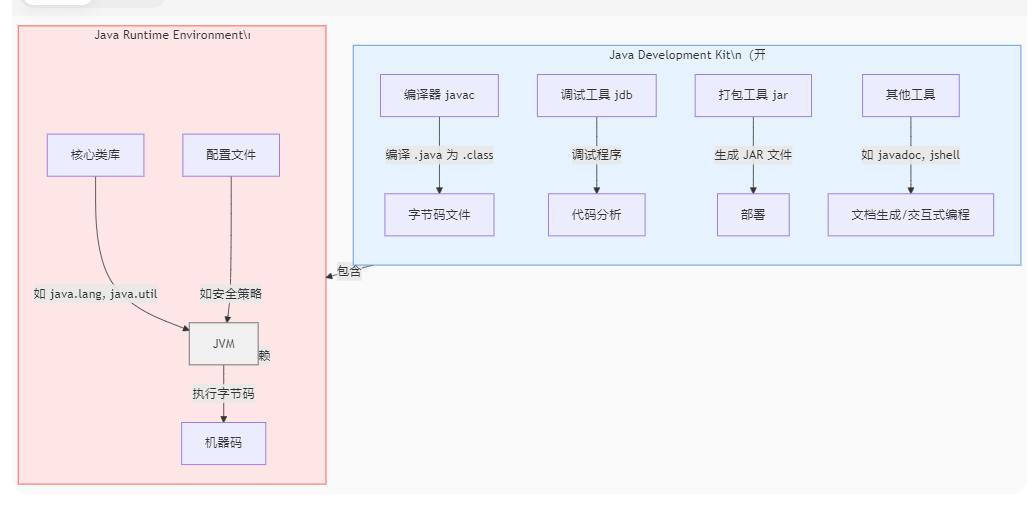
目录 1.概念 1.1.java的特定有哪些? 1.2.java有哪些优势哪些劣势? 1.3.java为什么可以跨平台? 1.4JVM,JDK,JRE它们有什么区别? 1.5.编译型语言与解释型语言的区别? 2.数据类型 2.1.long与int类型可以互转吗&…...
)
以前端的角度理解 Kubernetes(K8s)
作为一名前端开发者,我们每天都在与 React、Vue、Webpack 等工具打交道,而 Kubernetes(K8s)听起来更像是后端或运维的“专属领域”。但实际上,K8s 的核心思想和前端开发中的某些模式高度相似。那么咱们用熟悉的类比帮助…...
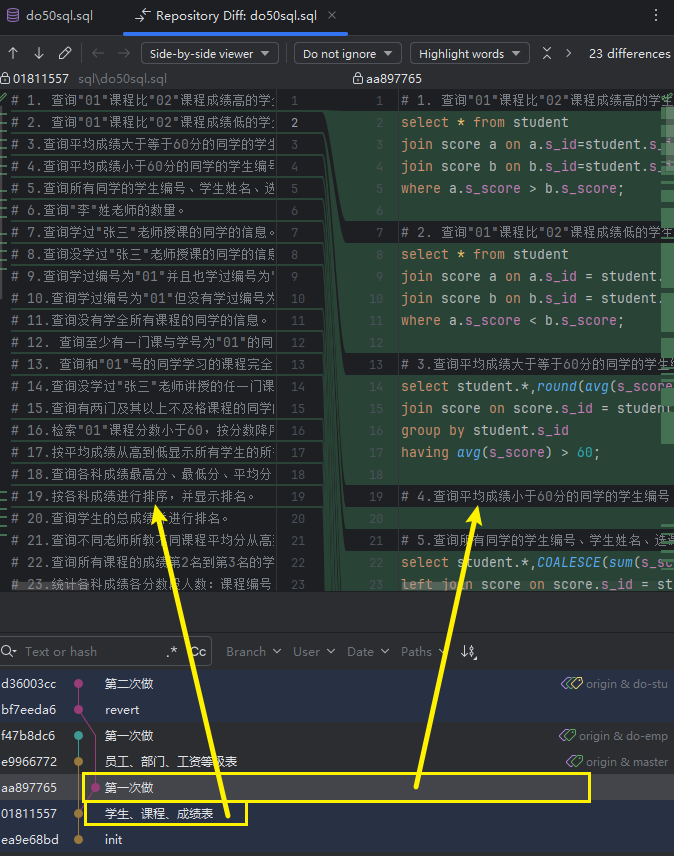
自用git记录
像重复做自己在网上找的练习题,这种类型的git仓库管理,一般会用到以下命令: git revert a1b2c3 很复杂的git历史变成简单git历史 能用git rebase -i HEAD~5^这种命令解决,就最好(IDEA还带GUI,很方便&…...

pyhton基础【2】基本语法
一. 注释 单行注释 以#开头,#右边的所有的内容当做说明,起辅助说明作用 # 我是一个单行注释 print(Hello) 多行注释 """ 在三引号中的注释被称之为多行注释 可以写很多行的功能说明 """ 二. 交互模式 终端输入代码…...

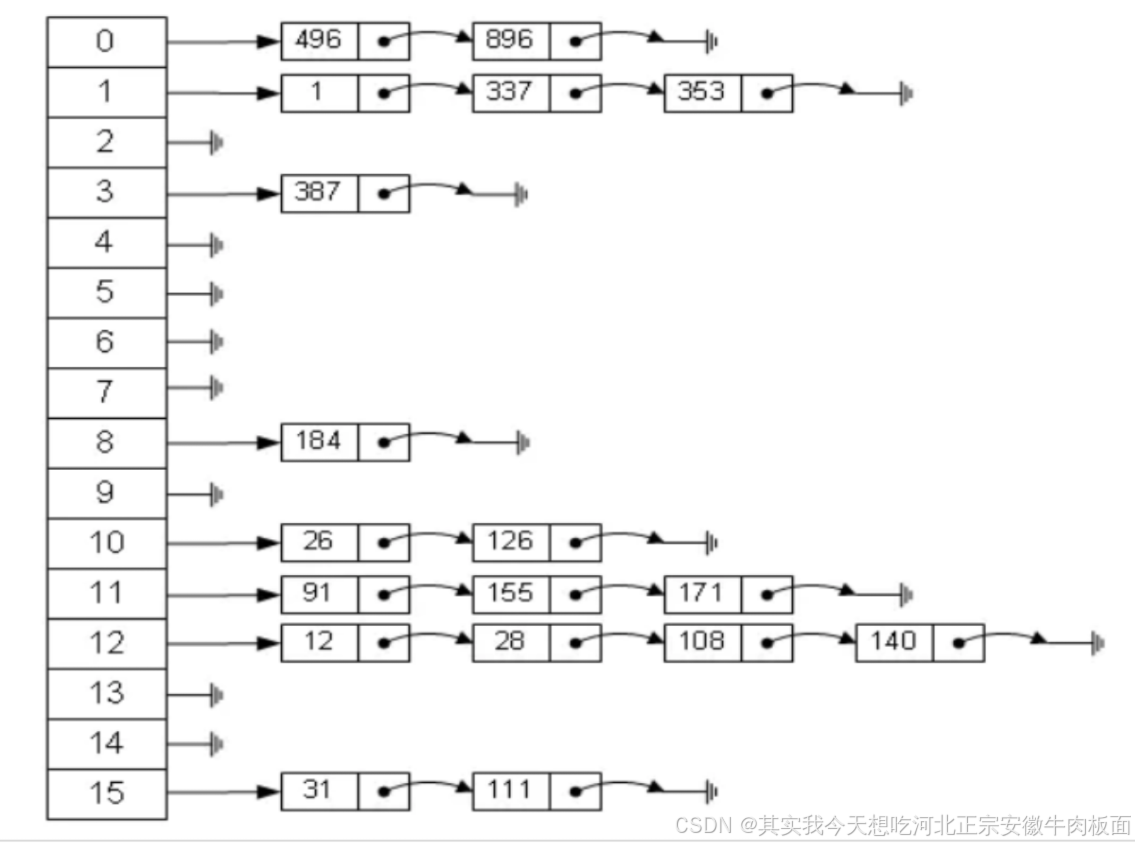
python数据结构-列表详解
Python中的列表(List)是一种序列类型的数据结构,它支持元素的动态添加和删除,可以容纳任意类型的数据,包括数字、字符串、甚至是其他列表或其他复杂数据结构。列表因其灵活性和广泛的应用场景,成为Python中最常用的数据结构之一。…...
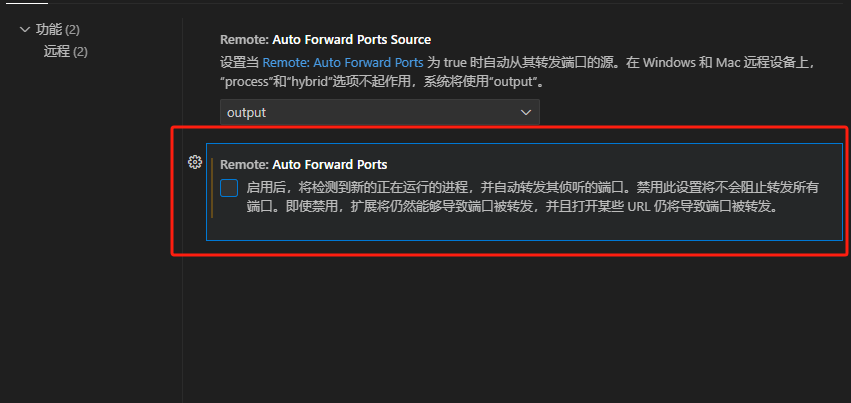
本地环境下 前端突然端口占用问题 针对vscode
1.问题背景 本地运行前端代码,虚拟机中使用nginx反向代理。两者都使用vscode进行开发。后端使用vscode远程连接。在前端发起一次接口请求后,后端会产生新的监听端口,出现如下图的提示情况。随后前端刷新,甚至无法正常显示界面。 …...

flutter 项目调试、flutter run --debug调试模式 devtools界面说明
Flutter DevTools 网页界面说明 1. 顶部导航栏 Inspector:查看和调试 Widget 树,实时定位 UI 问题。Performance-- 性能分析面板,查看帧率、CPU 和 GPU 使用情况,识别卡顿和性能瓶颈。Memory-- 内存使用和对象分配分析ÿ…...
中查看设备的 IP 地址)
在局域网(LAN)中查看设备的 IP 地址
在局域网(LAN)中查看设备的 IP 地址,可以使用以下几种方法: 方法 1:使用 ipconfig(Windows) 1. 打开 CMD: 按 Win R,输入 cmd,回车。 2. 输入命令&#…...

Axure 基本用法学习笔记
一、元件操作基础 1. 可见性控制 隐藏/显示:可以设置元件的可见性,使元件在特定条件下隐藏或可见 应用场景:创建动态交互效果,如点击按钮显示隐藏内容 2. 层级管理 层级概念:元件有上下层关系,上层元件…...

使用 Hyperlane 实现 WebSocket广播
使用 Hyperlane 实现 WebSocket广播 hyperlane 框架原生支持 WebSocket 协议,开发者无需关心协议升级过程,即可通过统一接口处理 WebSocket 请求。本文将介绍如何使用 hyperlane 实现服务端的单点发送与广播发送功能,以及如何配套实现一个简…...
)
SQL每日一题(5)
前言:五更!五更琉璃!不对!是,五更佩可! 原始数据: new_hires reasonother_column1other_column2校园招聘信息 11社会招聘信息 22内部推荐信息 33猎头推荐信息 44校园招聘信息 55社会招聘信息…...

git提交通用规范
提交类型 类型说明feat新增功能或特性fix修复Bugdocs文档更新(README、CHANGELOG、注释等)style代码样式调整(空格、分号、格式等,不改变逻辑)refactor代码重构(既非新增功能,也非修复Bug的代码…...
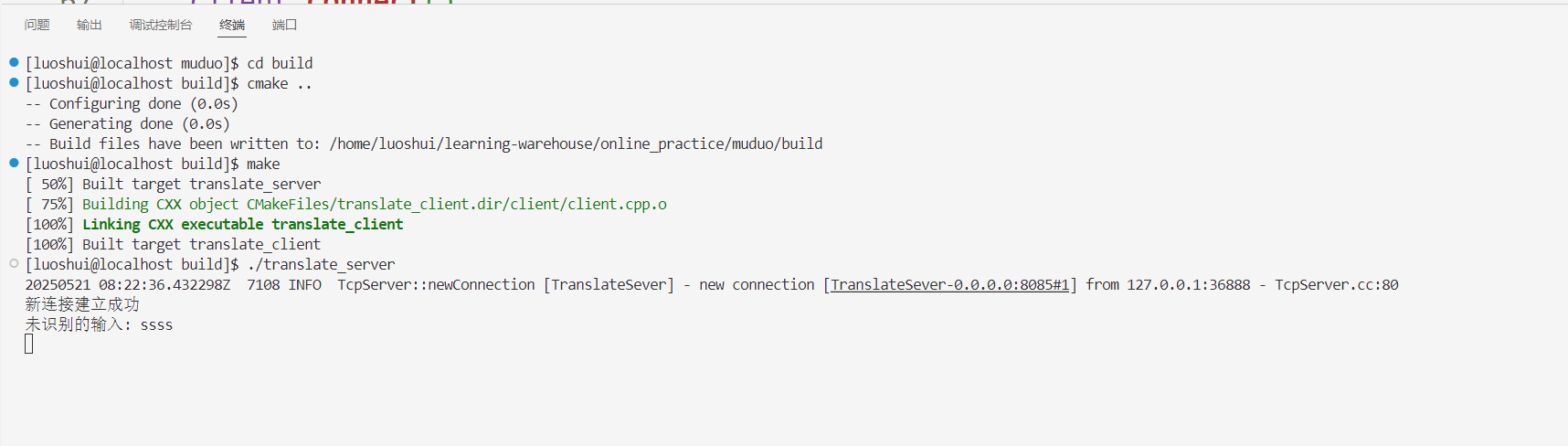
C++ - 仿 RabbitMQ 实现消息队列(3)(详解使用muduo库)
C - 仿 RabbitMQ 实现消息队列(3)(详解使用muduo库) muduo库的基层原理核心概念总结:通俗例子:餐厅模型优势体现典型场景 muduo库中的主要类EventloopMuduo 的 EventLoop 核心解析1. 核心机制:事…...