Python打卡第37天
@浙大疏锦行
早停策略和模型权重的保存
作业:对信贷数据集训练后保存权重,加载权重后继续训练50轮,并采取早停策略
import torch
import torch.nn as nn
import pandas as pd
import matplotlib.pyplot as plt
import torch.optim as optim
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import MinMaxScaler
import time
import warnings
from tqdm import tqdm
warnings.filterwarnings("ignore")# 设置GPU设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")# 设置中文字体
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False# 数据预处理部分(保持不变)
data = pd.read_csv('data.csv')# 处理分类特征
discrete_features = data.select_dtypes(include=['object']).columns.tolist()home_ownership_mapping = {'Own Home': 1,'Rent': 2,'Have Mortgage': 3,'Home Mortgage': 4
}
data['Home Ownership'] = data['Home Ownership'].map(home_ownership_mapping)years_in_job_mapping = {'< 1 year': 1,'1 year': 2,'2 years': 3,'3 years': 4,'4 years': 5,'5 years': 6,'6 years': 7,'7 years': 8,'8 years': 9,'9 years': 10,'10+ years': 11
}
data['Years in current job'] = data['Years in current job'].map(years_in_job_mapping)data = pd.get_dummies(data, columns=['Purpose'])
data2 = pd.read_csv("data.csv")
list_final = []
for i in data.columns:if i not in data2.columns:list_final.append(i)
for i in list_final:data[i] = data[i].astype(int)term_mapping = {'Short Term': 0,'Long Term': 1
}
data['Term'] = data['Term'].map(term_mapping)
data.rename(columns={'Term': 'Long Term'}, inplace=True)continuous_features = data.select_dtypes(include=['int64', 'float64']).columns.tolist()# 缺失值处理
for feature in continuous_features:mode_value = data[feature].mode()[0]data[feature].fillna(mode_value, inplace=True)# 数据集划分
X = data.drop(['Credit Default'], axis=1)
y = data['Credit Default']
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)# 归一化数据
scaler = MinMaxScaler()
X_train = scaler.fit_transform(X_train)
X_test = scaler.transform(X_test)# 转换为PyTorch张量
X_train = torch.FloatTensor(X_train).to(device)
y_train = torch.LongTensor(y_train.values).to(device)
X_test = torch.FloatTensor(X_test).to(device)
y_test = torch.LongTensor(y_test.values).to(device)# 定义模型
class MLP(nn.Module):def __init__(self):super(MLP, self).__init__()self.fc1 = nn.Linear(31, 10)self.relu = nn.ReLU()self.fc2 = nn.Linear(10, 3)def forward(self, x):out = self.fc1(x)out = self.relu(out)out = self.fc2(out)return out# 保存训练状态的函数
def save_checkpoint(model, optimizer, epoch, train_losses, test_losses, epochs, best_test_loss, best_epoch, counter, path):checkpoint = {'model_state_dict': model.state_dict(),'optimizer_state_dict': optimizer.state_dict(),'epoch': epoch,'train_losses': train_losses,'test_losses': test_losses,'epochs': epochs,'best_test_loss': best_test_loss,'best_epoch': best_epoch,'counter': counter}torch.save(checkpoint, path)# 加载训练状态的函数
def load_checkpoint(model, optimizer, path):checkpoint = torch.load(path)model.load_state_dict(checkpoint['model_state_dict'])optimizer.load_state_dict(checkpoint['optimizer_state_dict'])epoch = checkpoint['epoch']train_losses = checkpoint['train_losses']test_losses = checkpoint['test_losses']epochs = checkpoint['epochs']best_test_loss = checkpoint['best_test_loss']best_epoch = checkpoint['best_epoch']counter = checkpoint['counter']return model, optimizer, epoch, train_losses, test_losses, epochs, best_test_loss, best_epoch, counter# 主训练逻辑
def train_model(model, optimizer, criterion, X_train, y_train, X_test, y_test, start_epoch=0, num_epochs=20000, patience=50, checkpoint_path=None, continue_training=False):# 初始化训练历史if continue_training:model, optimizer, start_epoch, train_losses, test_losses, epochs, best_test_loss, best_epoch, counter = load_checkpoint(model, optimizer, checkpoint_path)print(f"从第 {start_epoch+1} 轮开始继续训练")else:train_losses = []test_losses = []epochs = []best_test_loss = float('inf')best_epoch = 0counter = 0print("开始全新训练")# 早停参数early_stopped = Falsestart_time = time.time()# 创建tqdm进度条with tqdm(total=num_epochs, initial=start_epoch, desc="训练进度", unit="epoch") as pbar:for epoch in range(start_epoch, num_epochs):# 前向传播outputs = model(X_train)train_loss = criterion(outputs, y_train)# 反向传播和优化optimizer.zero_grad()train_loss.backward()optimizer.step()# 记录损失值if (epoch + 1) % 200 == 0:# 计算测试集损失model.eval()with torch.no_grad():test_outputs = model(X_test)test_loss = criterion(test_outputs, y_test)model.train()train_losses.append(train_loss.item())test_losses.append(test_loss.item())epochs.append(epoch + 1)# 更新进度条pbar.set_postfix({'Train Loss': f'{train_loss.item():.4f}', 'Test Loss': f'{test_loss.item():.4f}'})# 早停逻辑if test_loss.item() < best_test_loss:best_test_loss = test_loss.item()best_epoch = epoch + 1counter = 0# 保存最佳模型torch.save(model.state_dict(), 'best_model.pth')print(f"在第 {epoch+1} 轮保存了最佳模型,测试损失: {best_test_loss:.4f}")else:counter += 1if counter >= patience:print(f"早停触发!在第{epoch+1}轮,测试集损失已有{patience}轮未改善。")print(f"最佳测试集损失出现在第{best_epoch}轮,损失值为{best_test_loss:.4f}")early_stopped = Truebreak# 保存检查点save_checkpoint(model, optimizer, epoch+1, train_losses, test_losses, epochs, best_test_loss, best_epoch, counter, 'checkpoint.pth')# 每1000个epoch更新一次进度条if (epoch + 1) % 1000 == 0:pbar.update(1000)# 确保进度条达到100%if pbar.n < num_epochs:pbar.update(num_epochs - pbar.n)time_all = time.time() - start_timeprint(f'Training time: {time_all:.2f} seconds')return model, train_losses, test_losses, epochs, best_test_loss, best_epoch, early_stopped# 主程序
if __name__ == "__main__":# 实例化模型model = MLP().to(device)# 定义损失函数和优化器criterion = nn.CrossEntropyLoss()optimizer = optim.SGD(model.parameters(), lr=0.01)# 第一阶段训练print("===== 第一阶段训练 =====")model, train_losses1, test_losses1, epochs1, best_test_loss1, best_epoch1, early_stopped1 = train_model(model, optimizer, criterion, X_train, y_train, X_test, y_test, num_epochs=20000, patience=50, checkpoint_path='checkpoint.pth', continue_training=False)# 加载最佳模型进行评估model.load_state_dict(torch.load('best_model.pth'))model.eval()with torch.no_grad():outputs = model(X_test)_, predicted = torch.max(outputs, 1)correct = (predicted == y_test).sum().item()accuracy = correct / y_test.size(0)print(f'第一阶段测试集准确率: {accuracy * 100:.2f}%')# 第二阶段训练:加载权重继续训练50轮,并采用早停策略print("\n===== 第二阶段训练:加载权重继续训练50轮 =====")# 重新实例化模型model_continued = MLP().to(device)# 加载最佳权重model_continued.load_state_dict(torch.load('best_model.pth'))# 重置优化器(可选)optimizer_continued = optim.SGD(model_continued.parameters(), lr=0.01)# 继续训练50轮model_continued, train_losses2, test_losses2, epochs2, best_test_loss2, best_epoch2, early_stopped2 = train_model(model_continued, optimizer_continued, criterion, X_train, y_train, X_test, y_test, start_epoch=0, num_epochs=50, patience=10, checkpoint_path='checkpoint_continued.pth', continue_training=False)# 最终评估model_continued.eval()with torch.no_grad():outputs = model_continued(X_test)_, predicted = torch.max(outputs, 1)correct = (predicted == y_test).sum().item()accuracy = correct / y_test.size(0)print(f'第二阶段测试集准确率: {accuracy * 100:.2f}%')# 合并损失曲线数据all_epochs = epochs1 + [e + epochs1[-1] if epochs1 else e for e in epochs2]all_train_losses = train_losses1 + train_losses2all_test_losses = test_losses1 + test_losses2# 可视化合并的损失曲线plt.figure(figsize=(12, 6))plt.plot(all_epochs, all_train_losses, label='Train Loss')plt.plot(all_epochs, all_test_losses, label='Test Loss')plt.axvline(x=epochs1[-1] if epochs1 else 0, color='r', linestyle='--', label='模型加载点')plt.xlabel('Epoch')plt.ylabel('Loss')plt.title('完整训练过程的损失曲线')plt.legend()plt.grid(True)plt.show()使用设备: cuda:0
===== 第一阶段训练 =====
开始全新训练
训练进度: 0%| | 0/20000 [00:00<?, ?epoch/s, Train Loss=0.7827, Test Loss=0.7925]在第 200 轮保存了最佳模型,测试损失: 0.7925
训练进度: 0%| | 0/20000 [00:00<?, ?epoch/s, Train Loss=0.6341, Test Loss=0.6490]在第 400 轮保存了最佳模型,测试损失: 0.6936
在第 600 轮保存了最佳模型,测试损失: 0.6490
训练进度: 0%| | 0/20000 [00:01<?, ?epoch/s, Train Loss=0.6062, Test Loss=0.6204]在第 800 轮保存了最佳模型,测试损失: 0.6204
训练进度: 5%|▌ | 1000/20000 [00:01<00:24, 777.06epoch/s, Train Loss=0.5706, Test Loss=0.5834]在第 1000 轮保存了最佳模型,测试损失: 0.5993
训练进度: 5%|▌ | 1000/20000 [00:01<00:24, 777.06epoch/s, Train Loss=0.5579, Test Loss=0.5703]在第 1200 轮保存了最佳模型,测试损失: 0.5834
在第 1400 轮保存了最佳模型,测试损失: 0.5703
训练进度: 5%|▌ | 1000/20000 [00:02<00:24, 777.06epoch/s, Train Loss=0.5374, Test Loss=0.5488]在第 1600 轮保存了最佳模型,测试损失: 0.5589
在第 1800 轮保存了最佳模型,测试损失: 0.5488
训练进度: 10%|█ | 2000/20000 [00:02<00:20, 865.72epoch/s, Train Loss=0.5214, Test Loss=0.5318]在第 2000 轮保存了最佳模型,测试损失: 0.5398
训练进度: 10%|█ | 2000/20000 [00:02<00:20, 865.72epoch/s, Train Loss=0.5147, Test Loss=0.5248]在第 2200 轮保存了最佳模型,测试损失: 0.5318
在第 2400 轮保存了最佳模型,测试损失: 0.5248
训练进度: 10%|█ | 2000/20000 [00:03<00:20, 865.72epoch/s, Train Loss=0.5039, Test Loss=0.5133]在第 2600 轮保存了最佳模型,测试损失: 0.5186
训练进度: 10%|█ | 2000/20000 [00:03<00:20, 865.72epoch/s, Train Loss=0.4996, Test Loss=0.5088]在第 2800 轮保存了最佳模型,测试损失: 0.5133
训练进度: 15%|█▌ | 3000/20000 [00:03<00:18, 941.13epoch/s, Train Loss=0.4959, Test Loss=0.5049]在第 3000 轮保存了最佳模型,测试损失: 0.5088
训练进度: 15%|█▌ | 3000/20000 [00:03<00:18, 941.13epoch/s, Train Loss=0.4927, Test Loss=0.5015]在第 3200 轮保存了最佳模型,测试损失: 0.5049
训练进度: 15%|█▌ | 3000/20000 [00:03<00:18, 941.13epoch/s, Train Loss=0.4900, Test Loss=0.4987]在第 3400 轮保存了最佳模型,测试损失: 0.5015
在第 3600 轮保存了最佳模型,测试损失: 0.4987
训练进度: 15%|█▌ | 3000/20000 [00:04<00:18, 941.13epoch/s, Train Loss=0.4856, Test Loss=0.4941]在第 3800 轮保存了最佳模型,测试损失: 0.4962
训练进度: 20%|██ | 4000/20000 [00:04<00:16, 974.43epoch/s, Train Loss=0.4839, Test Loss=0.4923]在第 4000 轮保存了最佳模型,测试损失: 0.4941
训练进度: 20%|██ | 4000/20000 [00:04<00:16, 974.43epoch/s, Train Loss=0.4824, Test Loss=0.4907]在第 4200 轮保存了最佳模型,测试损失: 0.4923
训练进度: 20%|██ | 4000/20000 [00:04<00:16, 974.43epoch/s, Train Loss=0.4810, Test Loss=0.4894]在第 4400 轮保存了最佳模型,测试损失: 0.4907
训练进度: 20%|██ | 4000/20000 [00:05<00:16, 974.43epoch/s, Train Loss=0.4799, Test Loss=0.4882]在第 4600 轮保存了最佳模型,测试损失: 0.4894
训练进度: 20%|██ | 4000/20000 [00:05<00:16, 974.43epoch/s, Train Loss=0.4788, Test Loss=0.4871]在第 4800 轮保存了最佳模型,测试损失: 0.4882
训练进度: 25%|██▌ | 5000/20000 [00:05<00:15, 999.44epoch/s, Train Loss=0.4788, Test Loss=0.4871]在第 5000 轮保存了最佳模型,测试损失: 0.4871
训练进度: 25%|██▌ | 5000/20000 [00:05<00:15, 999.44epoch/s, Train Loss=0.4771, Test Loss=0.4853]在第 5200 轮保存了最佳模型,测试损失: 0.4861
在第 5400 轮保存了最佳模型,测试损失: 0.4853
训练进度: 25%|██▌ | 5000/20000 [00:06<00:15, 999.44epoch/s, Train Loss=0.4757, Test Loss=0.4838]在第 5600 轮保存了最佳模型,测试损失: 0.4845
训练进度: 30%|███ | 6000/20000 [00:06<00:14, 994.42epoch/s, Train Loss=0.4751, Test Loss=0.4831]在第 5800 轮保存了最佳模型,测试损失: 0.4838
在第 6000 轮保存了最佳模型,测试损失: 0.4831
训练进度: 30%|███ | 6000/20000 [00:06<00:14, 994.42epoch/s, Train Loss=0.4740, Test Loss=0.4820]在第 6200 轮保存了最佳模型,测试损失: 0.4825
训练进度: 30%|███ | 6000/20000 [00:06<00:14, 994.42epoch/s, Train Loss=0.4735, Test Loss=0.4815]在第 6400 轮保存了最佳模型,测试损失: 0.4820
训练进度: 30%|███ | 6000/20000 [00:07<00:14, 994.42epoch/s, Train Loss=0.4730, Test Loss=0.4810]在第 6600 轮保存了最佳模型,测试损失: 0.4815
训练进度: 35%|███▌ | 7000/20000 [00:07<00:12, 1005.58epoch/s, Train Loss=0.4726, Test Loss=0.4806]在第 6800 轮保存了最佳模型,测试损失: 0.4810
在第 7000 轮保存了最佳模型,测试损失: 0.4806
训练进度: 35%|███▌ | 7000/20000 [00:07<00:12, 1005.58epoch/s, Train Loss=0.4719, Test Loss=0.4798]在第 7200 轮保存了最佳模型,测试损失: 0.4802
训练进度: 35%|███▌ | 7000/20000 [00:07<00:12, 1005.58epoch/s, Train Loss=0.4715, Test Loss=0.4794]在第 7400 轮保存了最佳模型,测试损失: 0.4798
训练进度: 35%|███▌ | 7000/20000 [00:07<00:12, 1005.58epoch/s, Train Loss=0.4712, Test Loss=0.4791]在第 7600 轮保存了最佳模型,测试损失: 0.4794
在第 7800 轮保存了最佳模型,测试损失: 0.4791
训练进度: 40%|████ | 8000/20000 [00:08<00:12, 926.74epoch/s, Train Loss=0.4706, Test Loss=0.4785] 在第 8000 轮保存了最佳模型,测试损失: 0.4788
训练进度: 40%|████ | 8000/20000 [00:08<00:12, 926.74epoch/s, Train Loss=0.4703, Test Loss=0.4782]在第 8200 轮保存了最佳模型,测试损失: 0.4785
训练进度: 40%|████ | 8000/20000 [00:09<00:12, 926.74epoch/s, Train Loss=0.4701, Test Loss=0.4779]在第 8400 轮保存了最佳模型,测试损失: 0.4782
在第 8600 轮保存了最佳模型,测试损失: 0.4779
训练进度: 40%|████ | 8000/20000 [00:09<00:12, 926.74epoch/s, Train Loss=0.4696, Test Loss=0.4774]在第 8800 轮保存了最佳模型,测试损失: 0.4777
训练进度: 45%|████▌ | 9000/20000 [00:09<00:11, 940.37epoch/s, Train Loss=0.4696, Test Loss=0.4774]在第 9000 轮保存了最佳模型,测试损失: 0.4774
训练进度: 45%|████▌ | 9000/20000 [00:09<00:11, 940.37epoch/s, Train Loss=0.4691, Test Loss=0.4770]在第 9200 轮保存了最佳模型,测试损失: 0.4772
训练进度: 45%|████▌ | 9000/20000 [00:10<00:11, 940.37epoch/s, Train Loss=0.4689, Test Loss=0.4768]在第 9400 轮保存了最佳模型,测试损失: 0.4770
在第 9600 轮保存了最佳模型,测试损失: 0.4768
训练进度: 45%|████▌ | 9000/20000 [00:10<00:11, 940.37epoch/s, Train Loss=0.4685, Test Loss=0.4764]在第 9800 轮保存了最佳模型,测试损失: 0.4765
训练进度: 50%|█████ | 10000/20000 [00:10<00:10, 959.34epoch/s, Train Loss=0.4684, Test Loss=0.4762]在第 10000 轮保存了最佳模型,测试损失: 0.4764
训练进度: 50%|█████ | 10000/20000 [00:10<00:10, 959.34epoch/s, Train Loss=0.4682, Test Loss=0.4760]在第 10200 轮保存了最佳模型,测试损失: 0.4762
训练进度: 50%|█████ | 10000/20000 [00:11<00:10, 959.34epoch/s, Train Loss=0.4680, Test Loss=0.4758]在第 10400 轮保存了最佳模型,测试损失: 0.4760
在第 10600 轮保存了最佳模型,测试损失: 0.4758
训练进度: 50%|█████ | 10000/20000 [00:11<00:10, 959.34epoch/s, Train Loss=0.4677, Test Loss=0.4755]在第 10800 轮保存了最佳模型,测试损失: 0.4757
训练进度: 55%|█████▌ | 11000/20000 [00:11<00:09, 972.87epoch/s, Train Loss=0.4675, Test Loss=0.4754]在第 11000 轮保存了最佳模型,测试损失: 0.4755
训练进度: 55%|█████▌ | 11000/20000 [00:11<00:09, 972.87epoch/s, Train Loss=0.4674, Test Loss=0.4752]在第 11200 轮保存了最佳模型,测试损失: 0.4754
在第 11400 轮保存了最佳模型,测试损失: 0.4752
训练进度: 55%|█████▌ | 11000/20000 [00:12<00:09, 972.87epoch/s, Train Loss=0.4671, Test Loss=0.4749]在第 11600 轮保存了最佳模型,测试损失: 0.4751
训练进度: 55%|█████▌ | 11000/20000 [00:12<00:09, 972.87epoch/s, Train Loss=0.4669, Test Loss=0.4748]在第 11800 轮保存了最佳模型,测试损失: 0.4749
训练进度: 60%|██████ | 12000/20000 [00:12<00:08, 984.95epoch/s, Train Loss=0.4668, Test Loss=0.4747]在第 12000 轮保存了最佳模型,测试损失: 0.4748
在第 12200 轮保存了最佳模型,测试损失: 0.4747
训练进度: 60%|██████ | 12000/20000 [00:13<00:08, 984.95epoch/s, Train Loss=0.4666, Test Loss=0.4744]在第 12400 轮保存了最佳模型,测试损失: 0.4746
在第 12600 轮保存了最佳模型,测试损失: 0.4744
训练进度: 60%|██████ | 12000/20000 [00:13<00:08, 984.95epoch/s, Train Loss=0.4663, Test Loss=0.4742]在第 12800 轮保存了最佳模型,测试损失: 0.4743
训练进度: 65%|██████▌ | 13000/20000 [00:13<00:07, 988.03epoch/s, Train Loss=0.4662, Test Loss=0.4741]在第 13000 轮保存了最佳模型,测试损失: 0.4742
训练进度: 65%|██████▌ | 13000/20000 [00:13<00:07, 988.03epoch/s, Train Loss=0.4661, Test Loss=0.4740]在第 13200 轮保存了最佳模型,测试损失: 0.4741
训练进度: 65%|██████▌ | 13000/20000 [00:14<00:07, 988.03epoch/s, Train Loss=0.4660, Test Loss=0.4739]在第 13400 轮保存了最佳模型,测试损失: 0.4740
在第 13600 轮保存了最佳模型,测试损失: 0.4739
训练进度: 65%|██████▌ | 13000/20000 [00:14<00:07, 988.03epoch/s, Train Loss=0.4658, Test Loss=0.4737]在第 13800 轮保存了最佳模型,测试损失: 0.4738
训练进度: 70%|███████ | 14000/20000 [00:14<00:06, 996.60epoch/s, Train Loss=0.4658, Test Loss=0.4737]在第 14000 轮保存了最佳模型,测试损失: 0.4737
训练进度: 70%|███████ | 14000/20000 [00:14<00:06, 996.60epoch/s, Train Loss=0.4657, Test Loss=0.4736]在第 14200 轮保存了最佳模型,测试损失: 0.4736
训练进度: 70%|███████ | 14000/20000 [00:14<00:06, 996.60epoch/s, Train Loss=0.4656, Test Loss=0.4735]在第 14400 轮保存了最佳模型,测试损失: 0.4735
训练进度: 70%|███████ | 14000/20000 [00:15<00:06, 996.60epoch/s, Train Loss=0.4655, Test Loss=0.4735]在第 14600 轮保存了最佳模型,测试损失: 0.4735
训练进度: 70%|███████ | 14000/20000 [00:15<00:06, 996.60epoch/s, Train Loss=0.4654, Test Loss=0.4734]在第 14800 轮保存了最佳模型,测试损失: 0.4734
训练进度: 75%|███████▌ | 15000/20000 [00:15<00:05, 904.70epoch/s, Train Loss=0.4653, Test Loss=0.4733]在第 15000 轮保存了最佳模型,测试损失: 0.4733
训练进度: 75%|███████▌ | 15000/20000 [00:16<00:05, 904.70epoch/s, Train Loss=0.4652, Test Loss=0.4732]在第 15200 轮保存了最佳模型,测试损失: 0.4732
训练进度: 75%|███████▌ | 15000/20000 [00:16<00:05, 904.70epoch/s, Train Loss=0.4651, Test Loss=0.4731]在第 15400 轮保存了最佳模型,测试损失: 0.4731
训练进度: 75%|███████▌ | 15000/20000 [00:16<00:05, 904.70epoch/s, Train Loss=0.4650, Test Loss=0.4731]在第 15600 轮保存了最佳模型,测试损失: 0.4731
训练进度: 75%|███████▌ | 15000/20000 [00:16<00:05, 904.70epoch/s, Train Loss=0.4649, Test Loss=0.4730]在第 15800 轮保存了最佳模型,测试损失: 0.4730
训练进度: 80%|████████ | 16000/20000 [00:17<00:04, 858.96epoch/s, Train Loss=0.4648, Test Loss=0.4729]在第 16000 轮保存了最佳模型,测试损失: 0.4729
训练进度: 80%|████████ | 16000/20000 [00:17<00:04, 858.96epoch/s, Train Loss=0.4648, Test Loss=0.4729]在第 16200 轮保存了最佳模型,测试损失: 0.4729
训练进度: 80%|████████ | 16000/20000 [00:17<00:04, 858.96epoch/s, Train Loss=0.4647, Test Loss=0.4728]在第 16400 轮保存了最佳模型,测试损失: 0.4728
训练进度: 80%|████████ | 16000/20000 [00:17<00:04, 858.96epoch/s, Train Loss=0.4646, Test Loss=0.4727]在第 16600 轮保存了最佳模型,测试损失: 0.4727
训练进度: 80%|████████ | 16000/20000 [00:18<00:04, 858.96epoch/s, Train Loss=0.4645, Test Loss=0.4727]在第 16800 轮保存了最佳模型,测试损失: 0.4727
训练进度: 85%|████████▌ | 17000/20000 [00:18<00:03, 836.11epoch/s, Train Loss=0.4644, Test Loss=0.4726]在第 17000 轮保存了最佳模型,测试损失: 0.4726
训练进度: 85%|████████▌ | 17000/20000 [00:18<00:03, 836.11epoch/s, Train Loss=0.4644, Test Loss=0.4725]在第 17200 轮保存了最佳模型,测试损失: 0.4725
训练进度: 85%|████████▌ | 17000/20000 [00:18<00:03, 836.11epoch/s, Train Loss=0.4643, Test Loss=0.4725]在第 17400 轮保存了最佳模型,测试损失: 0.4725
训练进度: 85%|████████▌ | 17000/20000 [00:19<00:03, 836.11epoch/s, Train Loss=0.4642, Test Loss=0.4724]在第 17600 轮保存了最佳模型,测试损失: 0.4724
训练进度: 85%|████████▌ | 17000/20000 [00:19<00:03, 836.11epoch/s, Train Loss=0.4642, Test Loss=0.4724]在第 17800 轮保存了最佳模型,测试损失: 0.4724
训练进度: 90%|█████████ | 18000/20000 [00:19<00:02, 798.55epoch/s, Train Loss=0.4641, Test Loss=0.4723]在第 18000 轮保存了最佳模型,测试损失: 0.4723
训练进度: 90%|█████████ | 18000/20000 [00:20<00:02, 798.55epoch/s, Train Loss=0.4640, Test Loss=0.4723]在第 18200 轮保存了最佳模型,测试损失: 0.4723
训练进度: 90%|█████████ | 18000/20000 [00:20<00:02, 798.55epoch/s, Train Loss=0.4640, Test Loss=0.4722]在第 18400 轮保存了最佳模型,测试损失: 0.4722
训练进度: 90%|█████████ | 18000/20000 [00:20<00:02, 798.55epoch/s, Train Loss=0.4639, Test Loss=0.4722]在第 18600 轮保存了最佳模型,测试损失: 0.4722
训练进度: 90%|█████████ | 18000/20000 [00:20<00:02, 798.55epoch/s, Train Loss=0.4639, Test Loss=0.4721]在第 18800 轮保存了最佳模型,测试损失: 0.4721
训练进度: 95%|█████████▌| 19000/20000 [00:21<00:01, 777.80epoch/s, Train Loss=0.4638, Test Loss=0.4721]在第 19000 轮保存了最佳模型,测试损失: 0.4721
训练进度: 95%|█████████▌| 19000/20000 [00:21<00:01, 777.80epoch/s, Train Loss=0.4637, Test Loss=0.4720]在第 19200 轮保存了最佳模型,测试损失: 0.4720
训练进度: 95%|█████████▌| 19000/20000 [00:21<00:01, 777.80epoch/s, Train Loss=0.4637, Test Loss=0.4720]在第 19400 轮保存了最佳模型,测试损失: 0.4720
训练进度: 95%|█████████▌| 19000/20000 [00:21<00:01, 777.80epoch/s, Train Loss=0.4636, Test Loss=0.4720]在第 19600 轮保存了最佳模型,测试损失: 0.4720
训练进度: 95%|█████████▌| 19000/20000 [00:22<00:01, 777.80epoch/s, Train Loss=0.4636, Test Loss=0.4719]在第 19800 轮保存了最佳模型,测试损失: 0.4719
训练进度: 100%|██████████| 20000/20000 [00:22<00:00, 893.30epoch/s, Train Loss=0.4635, Test Loss=0.4719]
在第 20000 轮保存了最佳模型,测试损失: 0.4719
Training time: 22.39 seconds
第一阶段测试集准确率: 77.00%===== 第二阶段训练:加载权重继续训练50轮 =====
开始全新训练
训练进度: 100%|██████████| 50/50 [00:00<00:00, 446.66epoch/s]
Training time: 0.11 seconds
第二阶段测试集准确率: 77.00%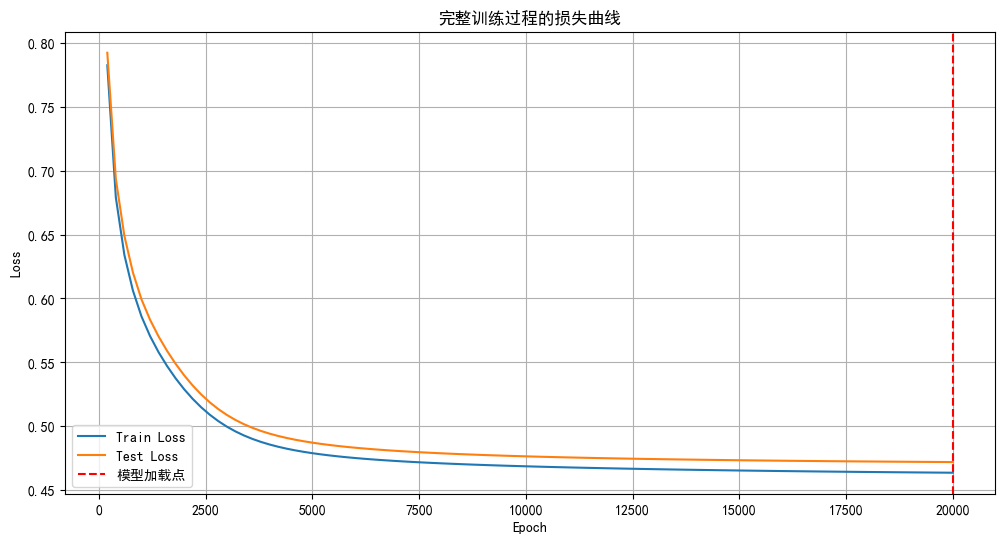
相关文章:
Python打卡第37天
浙大疏锦行 早停策略和模型权重的保存 作业:对信贷数据集训练后保存权重,加载权重后继续训练50轮,并采取早停策略 import torch import torch.nn as nn import pandas as pd import matplotlib.pyplot as plt import torch.optim as optim fr…...

使用 OpenCV 构建稳定的多面镜片墙效果(镜面反射 + Delaunay 分块)
✨ 效果概览 我们将实现一种视觉效果,模拟由许多小镜面拼接而成的“镜子墙”。每个镜面是一个三角形区域,其内容做镜像反射(如水平翻转),在视频中形成奇特的万花筒、哈哈镜、空间折叠感。 使用 OpenCV 实现“随机镜面…...
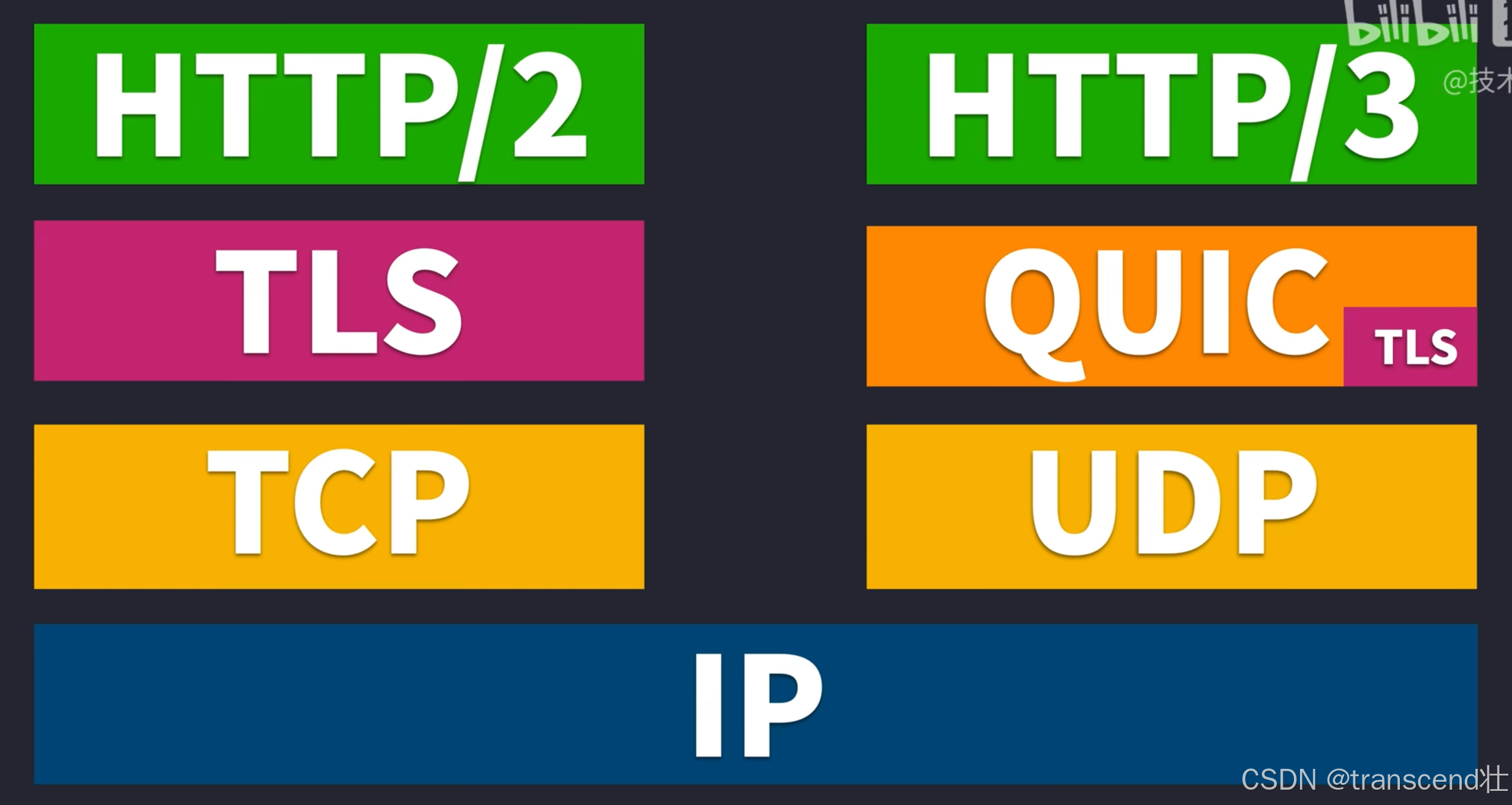
HTTP协议版本的发展(HTTP/0.9、1.0、1.1、2、3)
目录 HTTP协议层次图 HTTP/0.9 例子 HTTP/1.0 Content-Type 字段 Content-Encoding 字段 例子 1.0版本存在的问题:短链接、队头阻塞 HTTP/1.1 Host字段 Content-Length 字段 分块传输编码 1.1版本存在的问题 HTTP/2 HTTP/2数据传输 2版本存在的问题…...
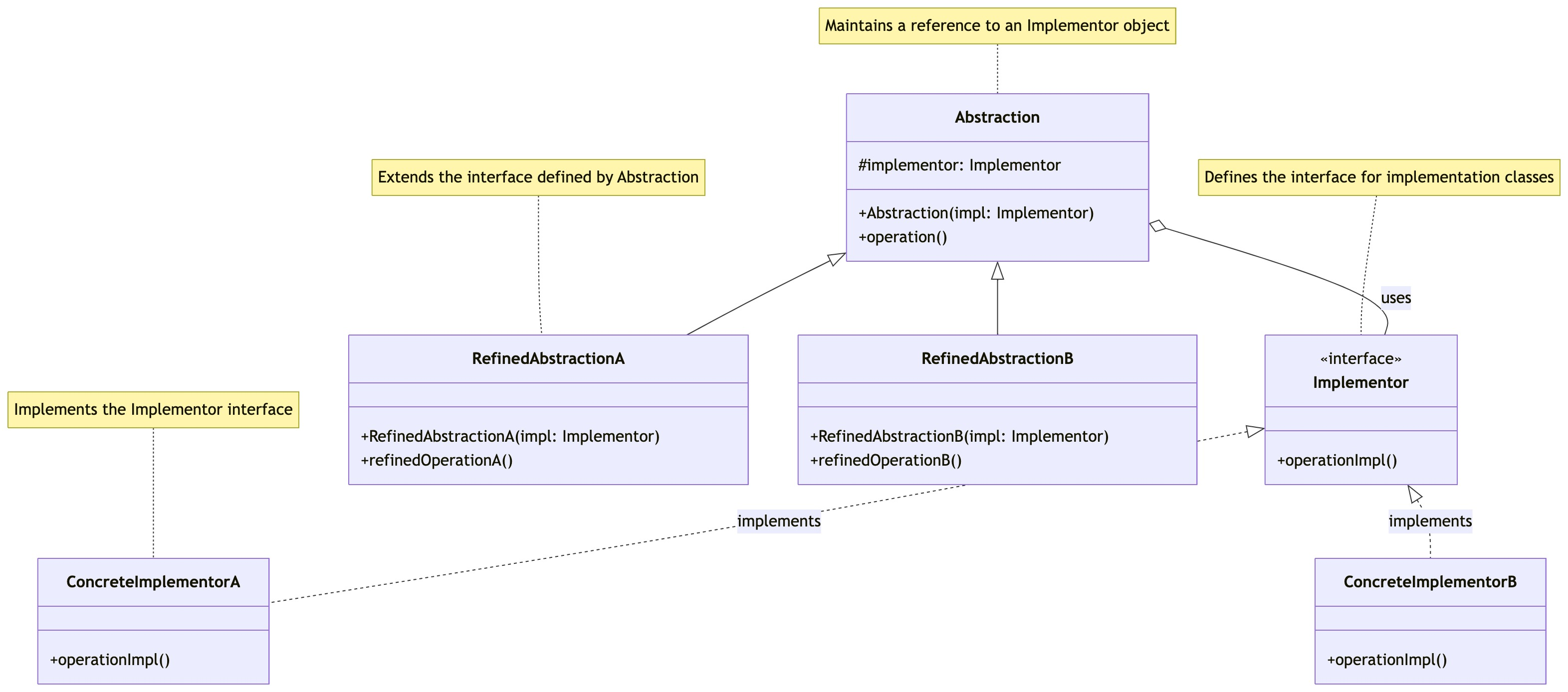
零基础设计模式——结构型模式 - 桥接模式
第三部分:结构型模式 - 桥接模式 (Bridge Pattern) 在学习了适配器模式如何解决接口不兼容问题后,我们来看看桥接模式。桥接模式是一种更侧重于系统设计的模式,它旨在将抽象部分与其实现部分分离,使它们可以独立地变化。 核心思…...

C++对象的内存模型
C++对象的内存模型涉及对象的数据成员(包括静态成员和非静态成员)、成员函数以及虚函数表等在内存中的布局和管理方式。以下是C++对象的内存模型的主要组成部分: 1. C++对象的组成 一个C++对象通常由以下几个部分组成: 非静态数据成员 对象的核心组成部分,每个对象都有自己…...
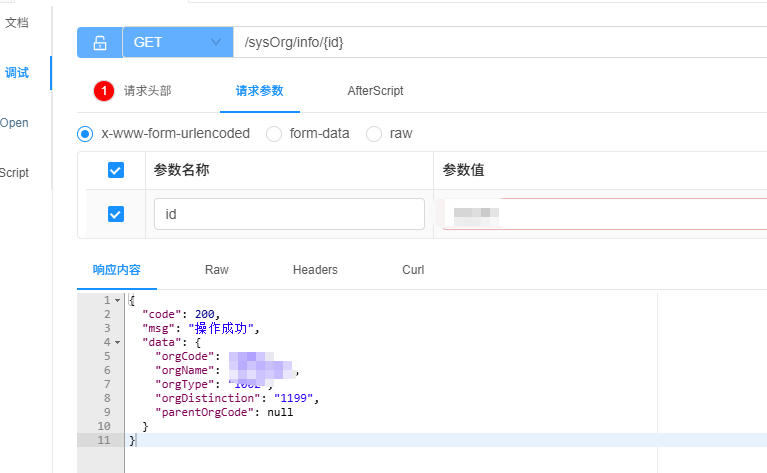
SpringBoot3集成Oauth2.1——4集成Swagger/OpenAPI3
文章目录 访问在线文档页面配置OpenApiConfig 在我之前的文章中,写了 SpringBoot3集成OpenAPI3(解决Boot2升级Boot3) 访问在线文档页面 当我们同样在SpringBoot3使用oauth2.1也就是我之前的文章中写的。现在我们要处理下面这两个的问题了。 <!-- 使用springdoc…...

基于深度学习的情绪识别检测系统【完整版】
最近很多小伙伴都在咨询,关于基于深度学习和神经网络算法的情绪识别检测系统。回顾往期文章【点击这里】,介绍了关于人脸数据的预处理和模型训练,这里就不在赘述。今天,将详细讲解如何从零基础手写情绪检测算法和情绪检测系统。主…...

本地依赖库的版本和库依赖的版本不一致如何解决?
我用的 yarn v4 版本,所以以下教程命令都基于yarn 这里假设我报错的库名字叫 XXXXXXXX,依赖他的库叫 AAAAAAAA 排查解决思路分析: 首先查看一下 XXXXXXXX 的依赖关系,执行 yarn why XXXXXXXX 首先我们要知道 yarn 自动做了库…...
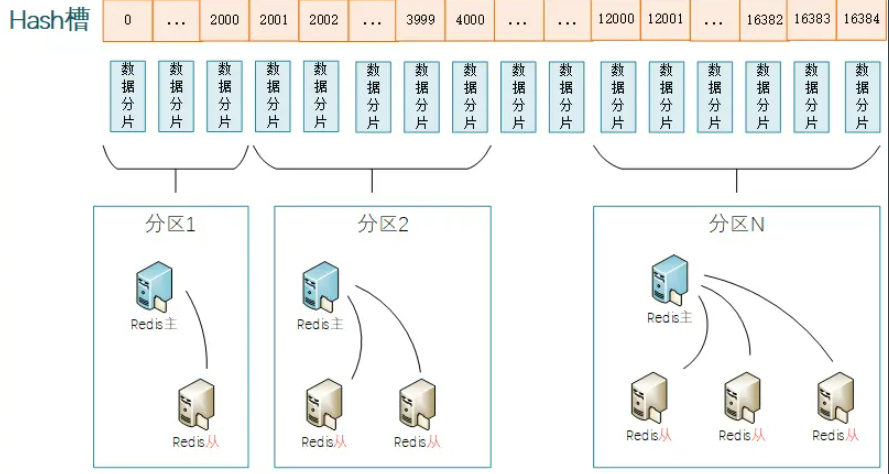
Redis学习打卡-Day7-高可用(下)
前面提到,在某些场景下,单实例存Redis缓存会存在的几个问题: 写并发:Redis单实例读写分离可以解决读操作的负载均衡,但对于写操作,仍然是全部落在了master节点上面,在海量数据高并发场景&#x…...

Spark on Yarn 高可用模式部署流程
一、引言 Spark是一个用于大规模数据分析处理的分布式计算框架,适用于快速处理大数据的场景。Yarn是一个资源调度框架,用于集群资源的调度和管理。Spark 的任务也可以提交到Yarn中运行,由Yarn进行资源调度。在生产环境中,为了避免单点故障导致整个集群不可用的情况,一个很…...
)
AI时代新词-大模型(Large Language Model)
一、什么是大模型? 大模型,全称为“大规模语言模型”(Large Language Model),是一种基于深度学习的人工智能技术。它通过海量的文本数据进行训练,学习语言的模式、语法和语义,从而能够生成自然…...

3d tiles高级样式设计与条件渲染
条件渲染是3D Tiles样式设置的一大亮点。我们可以通过设置不同的条件来实现复杂的视觉效果。例如,根据建筑物与某个特定点的距离来设置颜色和是否显示: tiles3d.style new Cesium.Cesium3DTileStyle({defines: {distance: "distance(vec2(${featur…...

Linux中logger命令的使用方法详解
文章目录 一、基础语法二、核心功能选项三、设施与优先级对照1. 常用设施(Facility)2. 优先级(Priority)从低到高:3. 组合示例 四、典型使用场景1. 记录简单消息2. 带标签和优先级3. 记录命令输出4. 发送到远程服…...
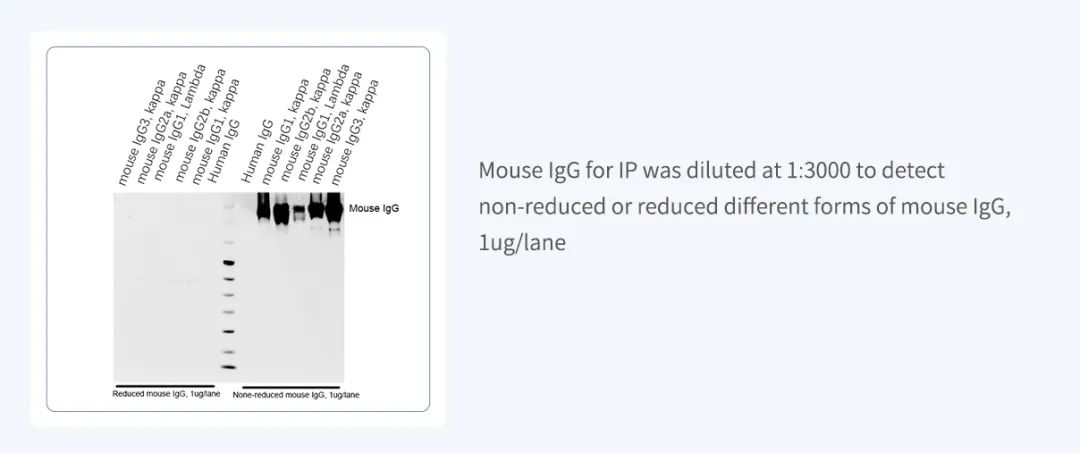
博奥龙Nanoantibody系列IP专用抗体
货号名称BDAA0260 HRP-Nanoantibody anti Mouse for IP BDAA0261 AbBox Fluor 680-Nanoantibody anti Mouse for IP BDAA0262 AbBox Fluor 800-Nanoantibody anti Mouse for IP ——无轻/重链干扰,更高亲和力和特异性 01Nanoantibody系列抗体 是利用噬菌体展示纳…...

webpack构建速度和打包体积优化方案
一、分析工具 1.1 webpack-bundle-analyzer 生成 stats.json 文件 打包命令webpack --config webpack.config.js --json > stats.json使用 webpack-bundle-analyzer 插件const BundleAnalyzerPlugin = require(webpack-bundle-analyzer).BundleAnalyzerPlugin; plugins: […...
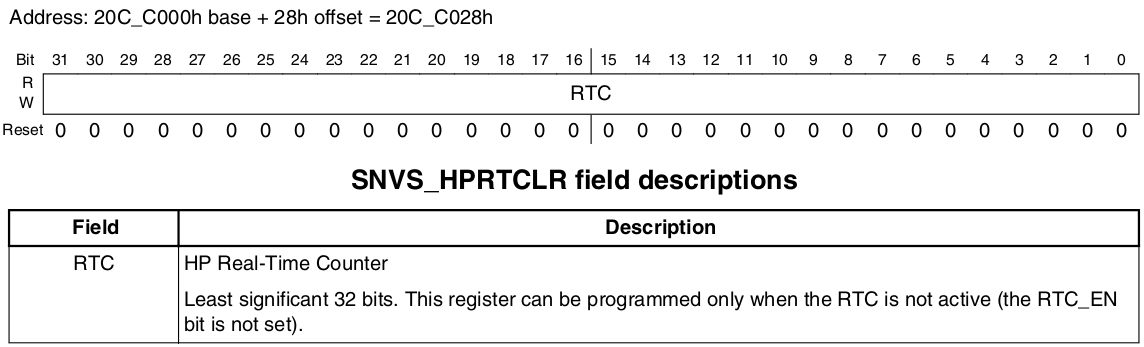
[IMX] 08.RTC 时钟
代码链接:GitHub - maoxiaoxian/imx 目录 1.IMX 的 SNVS 模块 2.SNVS 模块的寄存器 2.1.命令寄存器 - SNVS_HPCOMR 2.2.低功耗控制寄存器 - SNVS_LPCR 2.3.HP 模式的计数寄存器 MSB - SNVS_HPRTCMR 2.4.HP 模式的计数寄存器 LSB - SNVS_HPRTCLR 2.5.LP 模式的…...
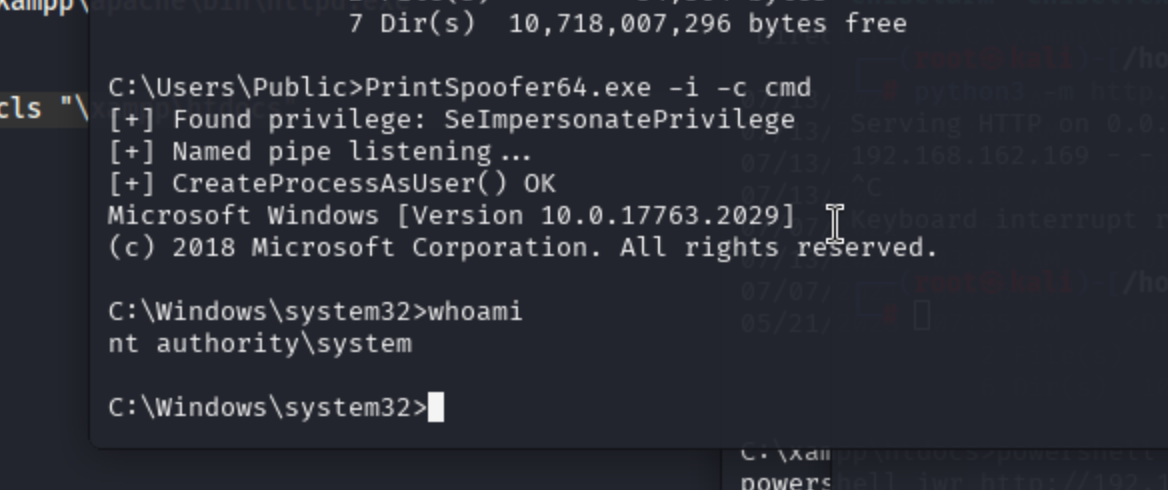
PG Craft靶机复现 宏macro攻击
一. 端口扫描 只有80端口开启 二. 网页查看 目录扫描一下: dirsearch -u http://192.168.131.169/ 发现 http://192.168.131.169/upload.php 网站书使用xampp搭建,暴露了路径 还发现上传文件 http://192.168.131.169/uploads/ 发现一个上传点&#x…...

Qt Creator快捷键合集
前言 QtCreator是一款跨平台的IDE,专为Qt开发设计,支持C/C++/JS/Python编程,支持设备远程调试,支持代码高亮,集成帮助文档,原生支持cmake和git,确实是一款朴实而又强大的集成开发环境,让人有种爱不释手的感觉 编辑 功能快捷键复制Ctrl + C粘贴Ctrl + V剪切Ctrl + X代…...
ElasticSearch--DSL查询语句
ElasticSearch DSL查询文档 分类 查询类型功能描述典型应用场景示例语法查询所有匹配所有文档,无过滤条件数据预览/测试json { "query": { "match_all": {} } }全文检索查询对文本字段分词后匹配,基于倒排索引搜索框模糊匹配、多字段…...

海康威视摄像头C#开发指南:从SDK对接到安全增强与高并发优化
一、海康威视SDK核心对接流程 1. 开发环境准备 官方SDK获取:从海康开放平台下载最新版SDK(如HCNetSDK.dll、PlayCtrl.dll)。依赖项安装:确保C运行库(如vcredist_x86.exe)与S…...
Redis(四) - 使用Python操作Redis详解
文章目录 前言一、下载Python插件二、创建项目三、安装 redis 库四、新建python软件包五、键操作六、字符串操作七、列表操作八、集合操作九、哈希表操作十、有序集合操作十一、完整代码1. 完整代码2. 项目下载 前言 本文是基于 Python 操作 Redis 数据库的实战指南࿰…...

Kotlin全栈工程师转型路径
针对 Android 开发者向全栈工程师的转型,结合 Kotlin 语言的独特优势,以下是分阶段转型路径和关键技术建议: 一、Kotlin 全栈技术栈构建 后端开发深化 Ktor 框架进阶: 掌握路由嵌套、内容协商(JSON/Protobuf…...

如何利用 Spring Data MongoDB 进行地理位置相关的查询?
以下是如何使用 Spring Data MongoDB 进行地理位置相关查询的步骤和示例: 核心概念: GeoJSON 对象: MongoDB 推荐使用 GeoJSON 格式来存储地理位置数据。Spring Data MongoDB 提供了相应的 GeoJSON 类型,如 GeoJsonPoint, GeoJsonPolygon, …...
服务器并发实现的五种方法
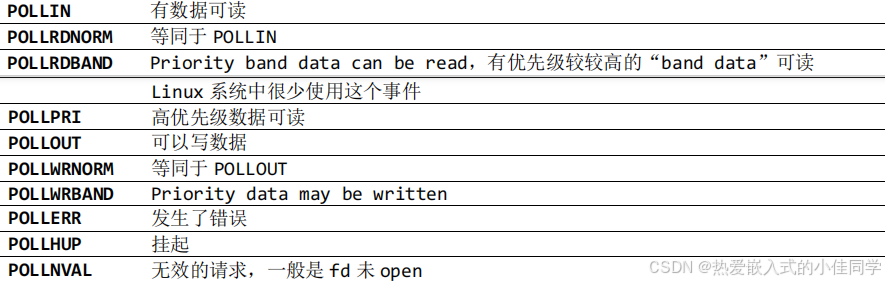
文章目录 前言一、单线程 / 进程二、多进程并发三、多线程并发四、IO多路转接(复用)select五、IO多路转接(复用)poll六、IO多路转接(复用)epoll 前言 关于网络编程相关知识可看我之前写过的文章࿱…...

PYTORCH_CUDA_ALLOC_CONF基本原理和具体示例
PYTORCH_CUDA_ALLOC_CONFmax_split_size_mb 是 PyTorch 提供的一项环境变量配置,用于控制 CUDA 显存分配的行为。通过指定此参数,可以有效管理 GPU 显存的碎片化,缓解因显存碎片化而导致的 “CUDA out of memory”(显存溢出&#…...

2025年系统架构师---综合知识卷
1.进程是一个具有独立功能的程序关于某数据集合的一次运行活动,是系统进行资源分配和调度的基本单位(线程包含于进程之中,可并发,是系统进行运算调度的最小单位)。一个进程是通过其物理实体被感知的,进程的物理实体又称为进程的静态描述,通常由三部分组成,分别是程序、…...

AI 抠图软件批量处理 + 发丝级精度,婚纱 / 玻璃一键抠透明 免安装
各位抠图小能手们,今天我要给大家介绍一款超厉害的工具——AiartyImageMattingPortable!它是基于人工智能的便携式图像抠图工具,专门为快速、精准抠图而生,处理复杂边缘和透明物体那简直就是它的拿手好戏! 咱先说说它…...

JVM 深度解析
一、JVM 概述 1.1 什么是 JVM? JVM(Java Virtual Machine,Java 虚拟机)是 Java 程序运行的核心引擎。它像一个“翻译官”,将 Java 字节码转换为机器能理解的指令,并管理程序运行时的内存、线程等资源。 …...
新能源汽车移动充电服务:如何通过智能调度提升充电桩可用率?
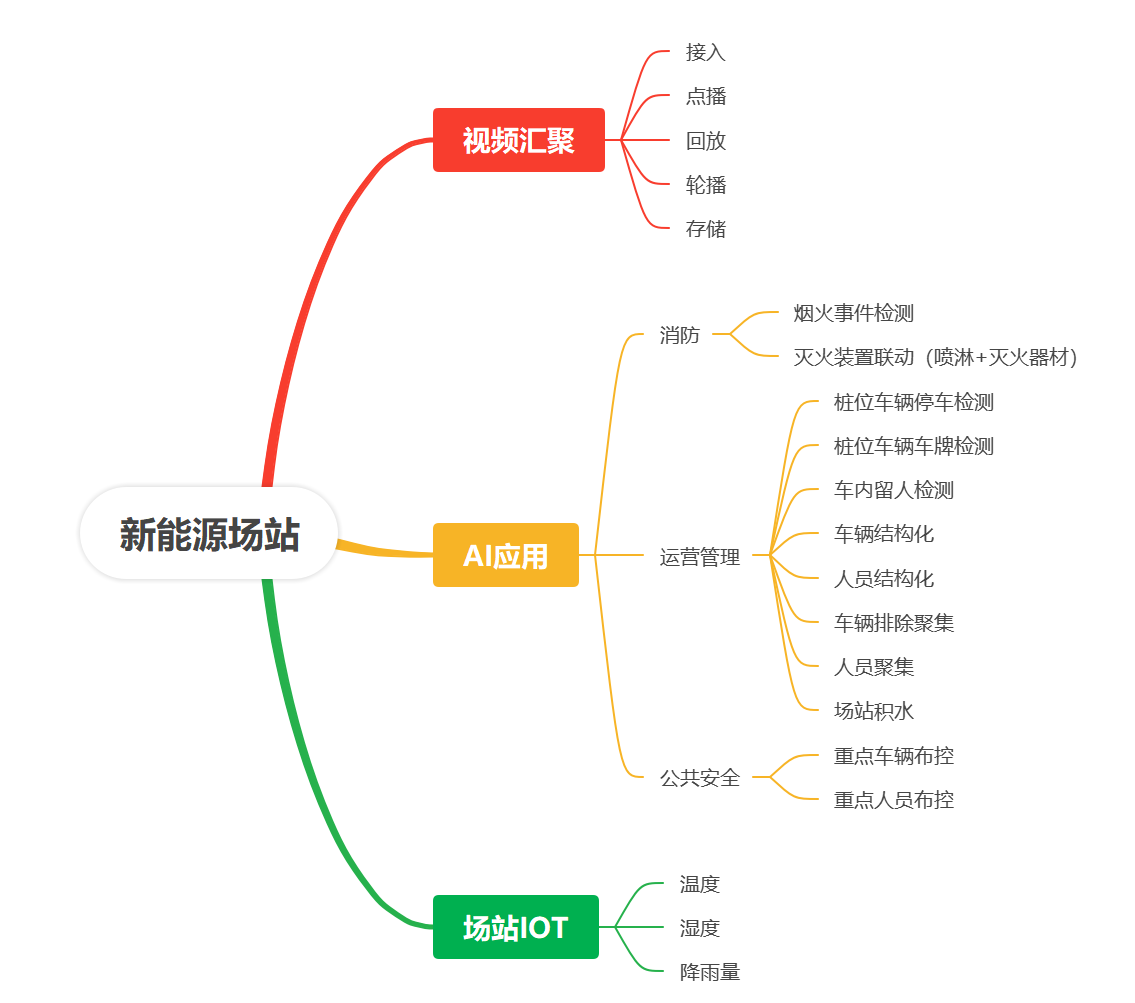
随着新能源汽车的普及,充电需求激增,但固定充电桩的布局难以满足用户灵活补能的需求,尤其在高峰时段或偏远地区,"充电难"问题日益凸显。移动充电服务作为新兴解决方案,通过动态调度充电资源,有望…...

SpringCloud Alibaba微服务-- Sentinel的使用(笔记)
雪崩问题: 小问题引发大问题,小服务出现故障,处理不当,可能导致整个微服务宕机。 假如商品服务出故障,购物车调用该服务,则可能出现处理时间过长,如果一秒几十个请求,那么处理时间过…...