STM32实战: CAN总线数据记录仪设计方案
以下是基于STM32的CAN总线数据记录仪/转发器的设计与实现方案,结合了核心功能和进阶需求:
系统架构
graph TBA[CAN总线] -->|CAN_H/CAN_L| B(STM32 bxCAN)B --> C[数据处理核心]C --> D[SD卡存储<br>FATFS文件系统]C --> E[串口输出<br>USART/RS232]C --> F[USB虚拟串口<br>可选]C --> G[网络转发<br>以太网/WiFi]H[用户指令] -->|UART/USB| C硬件设计
-
主控:STM32F4/F7/H7系列(推荐F407/F767,带双bxCAN和高速外设)
-
CAN收发器:TJA1050/SN65HVD230(5V)或TJA1042(3.3V)
-
存储:MicroSD卡槽(SPI模式)
-
通信接口:
-
UART转USB芯片(CH340/CP2102)
-
可选:ETH PHY(LAN8720)或WiFi模块(ESP8266/ESP32)
-
-
电源:汽车12V转3.3V DC-DC(支持宽电压输入)
软件实现
1. bxCAN初始化(500kbps标准波特率)
CAN_HandleTypeDef hcan;
CAN_FilterTypeDef filter;void CAN_Init() {hcan.Instance = CAN1;hcan.Init.Mode = CAN_MODE_NORMAL;hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;hcan.Init.TimeSeg1 = CAN_BS1_9TQ; // 采样点75%hcan.Init.TimeSeg2 = CAN_BS2_4TQ;hcan.Init.Prescaler = 6; // APB1=42MHz → 42MHz/(1+9+4)/6=500kbpsHAL_CAN_Init(&hcan);// 配置过滤器(接收所有帧)filter.FilterIdHigh = 0x0000;filter.FilterIdLow = 0x0000;filter.FilterMaskIdHigh = 0x0000;filter.FilterMaskIdLow = 0x0000;filter.FilterMode = CAN_FILTERMODE_IDMASK;filter.FilterScale = CAN_FILTERSCALE_32BIT;filter.FilterBank = 0;filter.FilterFIFOAssignment = CAN_RX_FIFO0;filter.SlaveStartFilterBank = 14;HAL_CAN_ConfigFilter(&hcan, &filter);// 启动CAN并启用接收中断HAL_CAN_Start(&hcan);HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING);
}2. CAN接收中断处理
CanRxMsgTypeDef rx_msg;
uint8_t can_buffer[100][12]; // 环形缓冲区void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) {if (HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &rx_msg, &rx_header) == HAL_OK) {// 解析帧数据: ID(4B) + DLC(1B) + Data(8B)uint32_t id = rx_header.StdId | (rx_header.IDE << 31);memcpy(&can_buffer[write_idx][0], &id, 4);can_buffer[write_idx][4] = rx_header.DLC;memcpy(&can_buffer[write_idx][5], rx_msg.Data, 8);write_idx = (write_idx + 1) % 100;}
}3. 数据存储(FATFS + SD卡)
FATFS fs;
FIL log_file;void SD_Log_Init() {f_mount(&fs, "", 1);f_open(&log_file, "log.csv", FA_OPEN_APPEND | FA_WRITE);// 写入CSV标题f_printf(&log_file, "Timestamp,ID,DLC,Data0-7\n");
}void Save_To_SD(uint8_t* frame) {uint32_t timestamp = HAL_GetTick();f_printf(&log_file, "%lu,0x%08X,%d", timestamp, *(uint32_t*)frame, frame[4]);for (int i=0; i<8; i++) f_printf(&log_file, ",%02X", frame[5+i]);f_printf(&log_file, "\n");// 每10帧刷新一次static int count=0;if(++count >= 10) {f_sync(&log_file);count = 0;}
}4. 串口数据转发
void UART_Send_Frame(uint8_t* frame) {char msg[64];int len = sprintf(msg, "[%08lX] %d:", *(uint32_t*)frame, frame[4]);for(int i=0; i<8; i++) len += sprintf(msg+len, " %02X", frame[5+i]);sprintf(msg+len, "\r\n");HAL_UART_Transmit(&huart2, (uint8_t*)msg, strlen(msg), 100);
}5. 主循环逻辑
while (1) {// 处理接收缓冲区if (read_idx != write_idx) {uint8_t* frame = can_buffer[read_idx];UART_Send_Frame(frame); // 串口输出Save_To_SD(frame); // SD卡存储// Ethernet_Forward(frame); // 网络转发read_idx = (read_idx + 1) % 100;}// 协议解析(示例J1939)J1939_Parse(frame);// 指令处理(接收用户命令)if(UART_RxReady()) {char cmd = UART_Read();if(cmd == 'T') Send_CAN_Test_Frame(); // 测试帧发送}
}进阶功能实现
J1939协议解析
void J1939_Parse(uint8_t* frame) {uint32_t id = *(uint32_t*)frame;if((id >> 24) == 0x18) { // PGN=0xF000 (发动机参数)uint16_t rpm = (frame[5] << 8) | frame[6]; // 转速在Data[1-2]printf("Engine RPM: %d\n", rpm);}
}CANopen对象字典处理
typedef struct {uint16_t index;uint8_t subindex;uint32_t data;
} CO_Object;CO_Object od[] = {{0x2000, 0, 0}, // 自定义参数1{0x2001, 0, 0} // 自定义参数2
};void Process_SDO(uint8_t* data) {if(data[0] == 0x22) { // 写SDO请求uint16_t index = (data[2]<<8)|data[1];uint8_t subindex = data[3];uint32_t value = *(uint32_t*)&data[4];// 更新对象字典for(int i=0; i<OD_SIZE; i++) {if(od[i].index==index && od[i].subindex==subindex) {od[i].data = value;break;}}}
}关键优化技术
-
双缓冲机制:
-
使用DMA+环形缓冲区避免数据丢失
-
设置CAN接收FIFO深度为3级(STM32F4特性)
-
-
实时性保障:
-
CAN中断处理时间 < 50μs(仅保存数据)
-
主循环处理频率 > 100Hz
-
-
存储优化:
-
二进制存储模式(节省空间)
-
按时间分割日志文件(每小时新建文件)
-
网络转发:
// LWIP UDP转发示例
void Ethernet_Forward(uint8_t* frame) {struct udp_pcb *pcb = udp_new();pbuf *p = pbuf_alloc(PBUF_TRANSPORT, 12, PBUF_RAM);memcpy(p->payload, frame, 12);udp_sendto(pcb, p, IP_ADDR, PORT);pbuf_free(p);
}学习资源
-
官方文档:
-
STM32参考手册(bxCAN章节)
-
[AN5342] STM32F4 CAN协议最佳实践
-
-
开源项目参考:
-
GitHub: "STM32-CAN-Logger" (FATFS+SD卡实现)
-
GitHub: "CAN2Ethernet-Gateway" (LWIP集成)
-
-
调试工具:
-
PCAN-View/CANalyzer(总线分析)
-
Wireshark(网络协议分析)
-
-
协议标准:
-
ISO 11898-1 (CAN 2.0)
-
SAE J1939协议文档
-
CiA 301 (CANopen)
-
此方案可实现1万帧/秒的稳定记录(500kbps负载率80%),通过模块化设计可灵活裁剪功能,满足从基础记录到工业网关的不同需求。
相关文章:

STM32实战: CAN总线数据记录仪设计方案
以下是基于STM32的CAN总线数据记录仪/转发器的设计与实现方案,结合了核心功能和进阶需求: 系统架构 graph TBA[CAN总线] -->|CAN_H/CAN_L| B(STM32 bxCAN)B --> C[数据处理核心]C --> D[SD卡存储<br>FATFS文件系统]C --> E[串口输出…...
【k8s】k8s集群搭建
k8s集群搭建 一、环境准备1.1 集群类型1.2 安装方式1.3 主机规划1.4 环境配置1.4.1 说明1.4.2 初始化1.4.3 关闭防火墙和禁止防火墙开机启动1.4.4 设置主机名1.4.5 主机名解析1.4.6 时间同步1.4.7 关闭selinux1.4.8 关闭swap分区1.4.9 将桥接的IPv4流量传递到iptables的链1.4.1…...
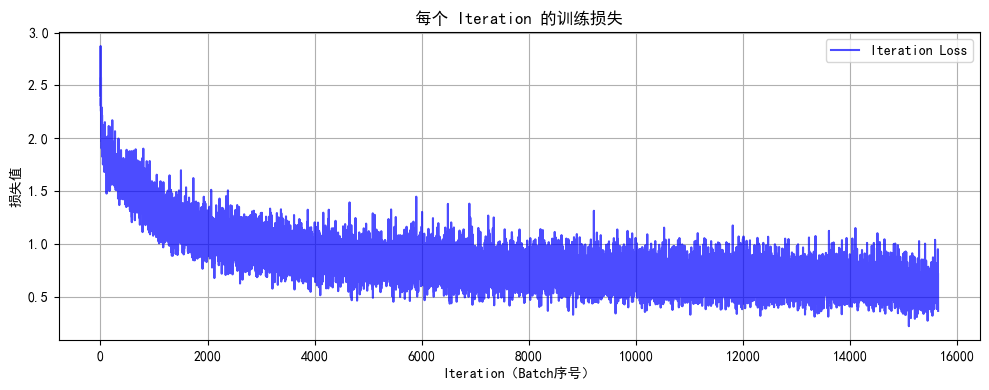
60天python训练计划----day45
DAY 45 Tensorboard使用介绍 知识点回顾: tensorboard的发展历史和原理tensorboard的常见操作tensorboard在cifar上的实战:MLP和CNN模型 之前的内容中,我们在神经网络训练中,为了帮助自己理解,借用了很多的组件&#x…...
)
Python训练营打卡Day46(2025.6.6)
知识点回顾: 不同CNN层的特征图:不同通道的特征图什么是注意力:注意力家族,类似于动物园,都是不同的模块,好不好试了才知道。通道注意力:模型的定义和插入的位置通道注意力后的特征图和热力图 i…...

C# Wkhtmltopdf HTML转PDF碰到的问题
最近碰到一个Html转PDF的需求,看了一下基本上都是需要依赖Wkhtmltopdf,需要在Windows或者linux安装这个可以后使用。找了一下选择了HtmlToPDFCore,这个库是对Wkhtmltopdf.NetCore简单二次封装,这个库的好处就是通过NuGet安装HtmlT…...
Vue3 (数组push数据报错) 解决Cannot read property ‘push‘ of null报错问题
解决Cannot read property ‘push‘ of null报错问题 错误写法 定义变量 <script setup>const workList ref([{name:,value:}])</script>正确定义变量 <script setup>const workList ref([]) </script>解决咯~...

Lifecycle 核心原理面试回答
1. 核心目标与设计思想 解耦生命周期管理: 将 Activity/Fragment 的生命周期回调逻辑从视图控制器中剥离,让业务组件(如 Presenter, Repository 封装)能独立感知生命周期。 状态驱动: 将离散的生命周期事件 (ON_CREAT…...

PHP:Web 开发的强大基石与未来展望
在当今数字化时代,Web 开发技术日新月异,各种编程语言和框架层出不穷。然而,PHP 作为一种历史悠久且广泛应用的服务器端脚本语言,依然在 Web 开发领域占据着重要地位。 PHP 的历史与现状 PHP(Hypertext Preprocessor…...
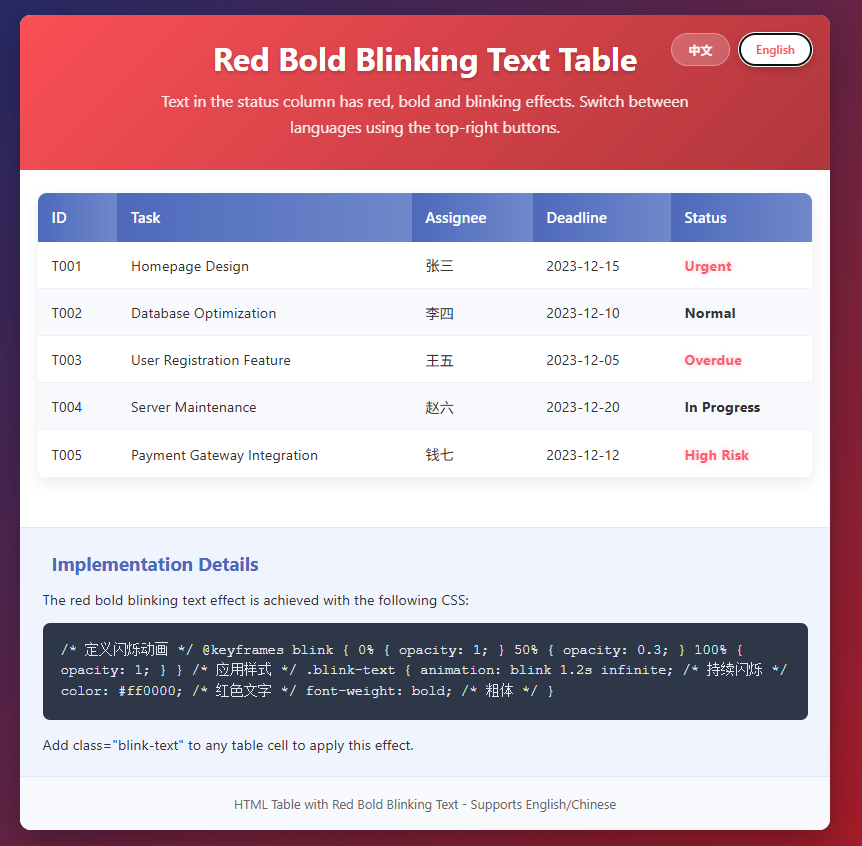
html文字红色粗体,闪烁渐变动画效果,中英文切换版本
1. 代码 <!DOCTYPE html> <html lang"zh"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>红色粗体闪烁文字表格 - 中英文切换</t…...

六、【ESP32开发全栈指南:深入解析ESP32 IDF中的WiFi AP模式开发】
1. 引言:AP模式的核心价值 ESP32的AP(Access Point)模式使设备成为独立无线热点,适用于: 设备配网(SmartConfig)无路由器场景的本地组网数据直采终端(传感器集中器)临时…...
基于Django开发的运动商城系统项目
运动商城系统项目描述 运动商城系统是一个基于现代Web技术构建的电子商务平台,专注于运动类商品的在线销售与管理。该系统采用前后端分离架构,前端使用Vue.js实现动态交互界面,后端基于Django框架提供RESTful API支持,数据库采用…...

Python训练营打卡Day42
知识点回顾 回调函数lambda函数hook函数的模块钩子和张量钩子Grad-CAM的示例 1. 回调函数(Callback Function) 回调函数是作为参数传递给另一个函数的函数,目的是在某个事件发生后执行。 def fetch_data(callback):# 模拟数据获取data {&quo…...

https相比http的区别
https相比http的区别 https相比http的区别在于:https使用了SSL/TLS加密协议,确保数据传输的安全性和完整性,通信时需要证书验证。 https相比于http的区别主要在于安全性。https使用SSL/TLS加密传输数据,确保数据在客户端和服务器之间的通信…...

【Linux】为 Git 设置 Commit 提交模板方法,可统一个人或者项目的提交风格
为 Git 设置 Commit 提交模板 新建模板文件。注意之后不能删除该文件。 gedit ~/.gitmessage.txt粘贴自己的模板。可以给 AI 提自己的需求,定制一个模板,例如 # <type>(<scope>): <description> # # [optional body] # # [optional…...

caliper config.yaml 文件配置,解释了每个配置项的作用和注意事项
以下是添加了详细备注的 config.yaml 文件配置,解释了每个配置项的作用和注意事项: # Caliper 性能测试主配置文件 # 文档参考: https://hyperledger.github.io/caliper/# 测试轮次配置 - 可以定义多个测试轮次,每个轮次测试不同的合约或场景 rounds:# 第一个测试轮次 - 测试…...

结构体和指针1
#include <iostream> using namespace std; #include <string> struct Student{ int age; string name; double score; }; int main() { //静态分配 Student s1 {18,"小明",88.5}; //cout << s1.name<<"的成绩为…...
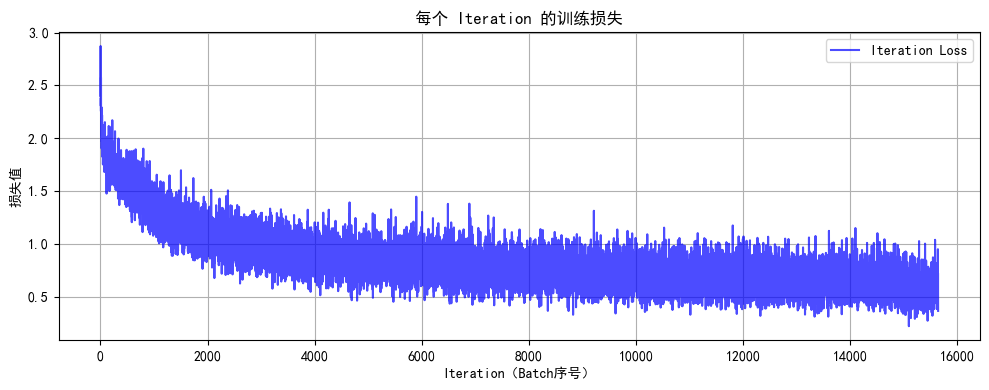
Python60日基础学习打卡Day45
之前的神经网络训练中,为了帮助理解借用了很多的组件,比如训练进度条、可视化的loss下降曲线、权重分布图,运行结束后还可以查看单张图的推理效果。 如果现在有一个交互工具可以很简单的通过按钮完成这些辅助功能那就好了,他就是…...

《Java 并发神器:深入理解CompletableFuture.supplyAsync与线程池实战优化》
一、背景介绍 在 Java 后端开发中,我们经常会遇到以下问题: 需要并行执行多个数据库查询或远程调用;单线程执行多个 .list() 方法时耗时过长;希望提升系统响应速度,但又不想引入过多框架。 这时,Java 8 …...
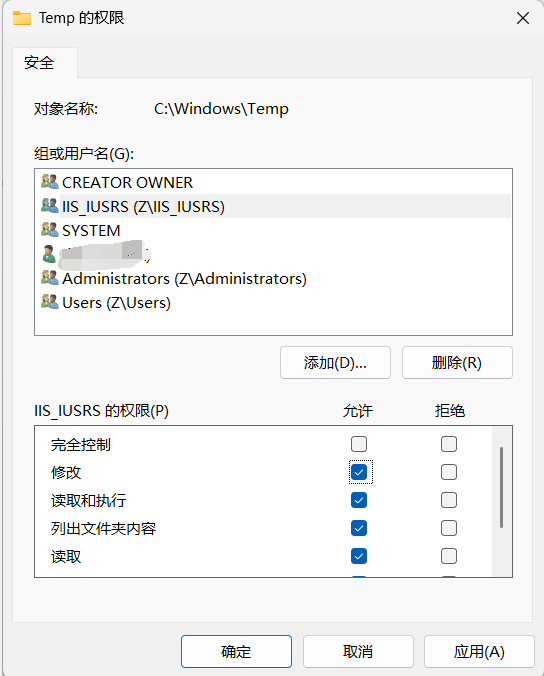
【Visual Studio 2022】卸载安装,ASP.NET
Visual Studio 2022 彻底卸载教程 手动清理残留文件夹 删除C:\Program Files\Microsoft Visual Studio 是旧版本 Visual Studio 的残留安装目录 文件夹名对应的 Visual Studio 版本Microsoft Visual Studio 9.0Visual Studio 2008Microsoft Visual Studio 10.0Visual Studio…...

JVM中的各类引用
JVM中的各类引用 欢迎来到我的博客:TWind的博客 我的CSDN::Thanwind-CSDN博客 我的掘金:Thanwinde 的个人主页 对象 众所不周知,Java中基本所有的对象都是分配在堆内存之中的,除开基本数据类型在栈帧中以外…...
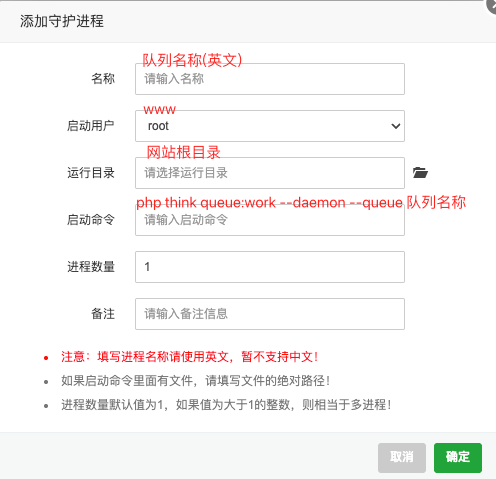
thinkphp-queue队列随笔
安装 # 创建项目 composer create-project topthink/think 5.0.*# 安装队列扩展 composer require topthink/think-queue 配置 // application/extra/queue.php<?php return [connector > Redis, // Redis 驱动expire > 0, // 任务的过期时间…...
STM32标准库-TIM输出比较
文章目录 一、输出比较二、PWM2.1简介2.2输出比较通道(高级)2.3 输出比较通道(通用)2.4输出比较模式2.5 PWM基本结构1、时基单元2、输出比较单元3、输出控制(绿色右侧)4、右上波形图(以绿色脉冲…...

科技创新驱动人工智能,计算中心建设加速产业腾飞
在科技飞速发展的当下,人工智能正以前所未有的速度融入我们的生活。一辆辆无人驾驶的车辆在道路上自如地躲避车辆和行人,行驶平稳且操作熟练;刷脸支付让购物变得安全快捷,一秒即可通行。这些曾经只存在于想象中的场景,…...

figma 和蓝湖 有什么区别
以下是 Figma 和蓝湖的详细对比分析: 核心定位区别 维度Figma蓝湖本质全功能云端设计工具设计协作与交付平台核心功能设计原型协作开发交付设计稿交付标注切图协作设计能力✅ 完整矢量设计工具❌ 无设计功能(需导入其他工具文件)适用阶段全流…...

SQLServer中的存储过程与事务
一、存储过程的概念 1. 定义 存储过程(Stored Procedure)是一组预编译的 SQL 语句的集合,它们被存储在数据库中,可以通过指定存储过程的名称并执行来调用它们。存储过程可以接受输入参数、输出参数,并且可以返回执行…...

STM32H562----------ADC外设详解
1、ADC 简介 STM32H5xx 系列有 2 个 ADC,都可以独立工作,其中 ADC1 和 ADC2 还可以组成双模式(提高采样率)。每个 ADC 最多可以有 20 个复用通道。这些 ADC 外设与 AHB 总线相连。 STM32H5xx 的 ADC 模块主要有如下几个特性: 1、可配置 12 位、10 位、8 位、6 位分辨率,…...

uniapp 安卓 APP 后台持续运行(保活)的尝试办法
在移动应用开发领域,安卓系统的后台管理机制较为复杂,应用在后台容易被系统回收,导致无法持续运行。对于使用 Uniapp 开发的安卓 APP 来说,实现后台持续运行(保活)是很多开发者面临的重要需求,比…...
AI大数据模型如何与thingsboard物联网结合
一、 AI大数据与ThingsBoard物联网的结合可以从以下几个方面实现: 1. 数据采集与集成 设备接入:ThingsBoard支持多种通信协议(如MQTT、CoAP、HTTP、Modbus、OPC-UA等),可以方便地接入各种物联网设备。通过这些协议&am…...
【SSM】SpringBoot笔记2:整合Junit、MyBatis
前言: 文章是系列学习笔记第9篇。基于黑马程序员课程完成,是笔者的学习笔记与心得总结,供自己和他人参考。笔记大部分是对黑马视频的归纳,少部分自己的理解,微量ai解释的内容(ai部分会标出)。 …...

STM32——CAN总线
STM32——CAN总线 1. CAN总线基础概念 1.1 CAN总线简介 控制器局域网(Controller Area Network, CAN)是由Bosch公司开发的串行通信协议,专为汽车电子和工业控制设计,具有以下核心特性: 多主控制架构:所有…...