MATLAB实战:视觉伺服控制实现方案
以下是一个基于MATLAB的视觉伺服控制项目实现方案,结合实时图像处理、目标跟踪和控制系统设计。我们将使用模拟环境进行演示,但代码结构可直接应用于真实硬件。
系统架构
图像采集 → 目标检测 → 误差计算 → PID控制器 → 执行器控制
完整代码实现 (MATLAB R2020b+)完整代码实现 (MATLAB R2020b+)
%% 视觉伺服控制系统
clear; clc; close all;% ========== 系统参数设置 ==========
desiredPos = [320, 240]; % 期望位置 (图像中心)
Kp = 0.05; % PID参数
Ki = 0.001;
Kd = 0.02;% ========== 初始化摄像头 ==========
if ~exist('cam', 'var')cam = webcam; % 使用默认摄像头% cam = webcam('IP Camera URL'); % 网络摄像头
end
frame = snapshot(cam);
imshow(frame); title('视觉伺服控制系统');% ========== 初始化执行器模型 ==========
actuatorPos = [100, 100]; % 初始位置 (模拟)
hActuator = impoint(gca, actuatorPos(1), actuatorPos(2));
setColor(hActuator, 'r');% ========== 主控制循环 ==========
prevError = [0, 0];
integral = [0, 0];for k = 1:500 % 最大迭代次数% 图像采集frame = snapshot(cam);% 目标检测 (使用颜色阈值)[targetPos, detectionStatus] = detectTarget(frame);if detectionStatus% 显示目标位置imshow(frame); hold on;plot(targetPos(1), targetPos(2), 'g+', 'MarkerSize', 20);plot(desiredPos(1), desiredPos(2), 'yx', 'MarkerSize', 20);% 计算位置误差error = desiredPos - targetPos;% PID控制器integral = integral + error;derivative = error - prevError;controlSignal = Kp*error + Ki*integral + Kd*derivative;prevError = error;% 执行器控制 (模拟)actuatorPos = actuatorPos + controlSignal;setPosition(hActuator, actuatorPos(1), actuatorPos(2));% 显示控制信息title(sprintf('误差: [%.1f, %.1f] | 控制量: [%.2f, %.2f]', ...error(1), error(2), controlSignal(1), controlSignal(2)));% 检查收敛if norm(error) < 5disp('目标已到达期望位置!');break;endelseimshow(frame);title('目标丢失 - 搜索中...');% 添加搜索策略 (此处省略)enddrawnow;
end% ========== 清理资源 ==========
clear cam;%% 目标检测函数
function [targetPos, status] = detectTarget(frame)% 颜色阈值分割 (示例: 检测红色物体)hsv = rgb2hsv(frame);% 红色阈值范围 (根据目标调整)hueMask = (hsv(:,:,1) > 0.95 | hsv(:,:,1) < 0.05);satMask = hsv(:,:,2) > 0.6;valMask = hsv(:,:,3) > 0.6;binaryMask = hueMask & satMask & valMask;% 形态学处理cleanMask = bwareaopen(binaryMask, 100);cleanMask = imclose(cleanMask, strel('disk', 5));% 区域分析stats = regionprops(cleanMask, 'Centroid', 'Area');if ~isempty(stats)% 选择最大区域[~, idx] = max([stats.Area]);targetPos = stats(idx).Centroid;status = true;elsetargetPos = [0, 0];status = false;end
end关键技能点实现说明
-
实时图像采集
-
使用
webcam对象连接USB摄像头 -
支持网络摄像头 (通过IP地址)
-
snapshot()函数实时捕获帧
-
-
目标检测与跟踪
-
颜色空间转换 (RGB→HSV) 提升鲁棒性
-
多阈值分割创建二值掩模
-
形态学处理 (去噪、填充)
-
区域属性分析 (
regionprops)定位目标中心
-
-
视觉反馈
-
实时显示目标位置 (绿色十字)
-
显示期望位置 (黄色十字)
-
显示执行器位置 (红色点)
-
实时显示误差和控制量
-
控制系统设计
-
位置误差计算:
error = desiredPos - targetPos -
数字PID控制器实现:
integral = integral + error; derivative = error - prevError; controlSignal = Kp*error + Ki*integral + Kd*derivative;硬件接口扩展 (真实设备)
-
% 机械臂控制示例 (需Robotics Toolbox) % arm = loadrobot('universalUR5'); % jointPos = inverseKinematics(arm, actuatorPos); % arm.setJointPositions(jointPos);% 小车控制示例 (需串口通信) % s = serialport('COM3', 9600); % write(s, [controlSignalX, controlSignalY], 'float');参数调整建议
-
目标检测
-
根据目标颜色调整HSV阈值
-
对于标记检测:替换为
detectAprilTags或detectSURFFeatures
-
-
控制器优化
-
调整PID增益:先调
Kp,再调Kd,最后Ki -
添加控制量限幅
-
实现速度控制模式
-
扩展功能建议
多目标跟踪
% 使用MultiObjectTracker对象
tracker = multiObjectTracker;
tracks = tracker(detections);深度信息融合
% 使用深度相机
depthCam = depthcam;
depthMap = snapshot(depthCam);
zPos = depthMap(round(targetPos(2)), round(targetPos(1)));轨迹规划
% 添加路径规划算法
waypoints = [100,100; 200,150; 320,240];
traj = trapveltraj(waypoints', 50);此系统完整实现了基于视觉的伺服控制闭环流程,可根据实际应用场景调整检测算法和控制参数。对于真实硬件部署,需添加安全限位和异常处理机制。
相关文章:

MATLAB实战:视觉伺服控制实现方案
以下是一个基于MATLAB的视觉伺服控制项目实现方案,结合实时图像处理、目标跟踪和控制系统设计。我们将使用模拟环境进行演示,但代码结构可直接应用于真实硬件。 系统架构 图像采集 → 目标检测 → 误差计算 → PID控制器 → 执行器控制 完整代码实现 …...
Oracle正则表达式学习
目录 一、正则表达简介 二、REGEXP_LIKE(x,匹配项) 三、REGEXP_INSTR 四、REGEXP_SUBSTR 五、REGEXP_REPLACE 一、正则表达简介 相关网址: https://cloud.tencent.com/developer/article/1456428 https://www.cnblogs.com/lxl57610/p/8227599.html https://…...

校招 java 面试基础题目及解析
我将结合常见的校招Java面试基础题目,从概念阐述、代码示例等角度展开,为你提供一份可用于学习的技术方案及应用实例。 校招Java面试基础题目解析与学习指南 在Java校招面试中,扎实掌握基础知识是成功的关键。本文将围绕常见的Java基础面试…...

# STM32F103 SD卡读写程序
下面是一个基于STM32F103系列微控制器的SD卡读写完整程序,使用标准外设库(StdPeriph)和FatFs文件系统。 硬件准备 STM32F103C8T6开发板(或其他F103系列)SD卡模块(SPI接口)连接线缆 硬件连接 SD卡模块 STM32F103 CS -> PA4 (SPI1_NSS) SCK -> PA5 (SPI…...

Spring中循环依赖问题的解决机制总结
一、解决机制 1. 什么是循环依赖 循环依赖是指两个或多个Bean之间相互依赖对方,形成一个闭环的依赖关系。最常见的情况是当Bean A依赖Bean B,而Bean B又依赖Bean A时,就形成了循环依赖。在Spring容器初始化过程中,如果不加以特殊…...

青少年编程与数学 01-011 系统软件简介 04 Linux操作系统
青少年编程与数学 01-011 系统软件简介 04 Linux操作系统 一、Linux 的发展历程(一)起源(二)早期发展(三)成熟与普及(四)移动与嵌入式领域的拓展 二、Linux 的内核与架构(…...
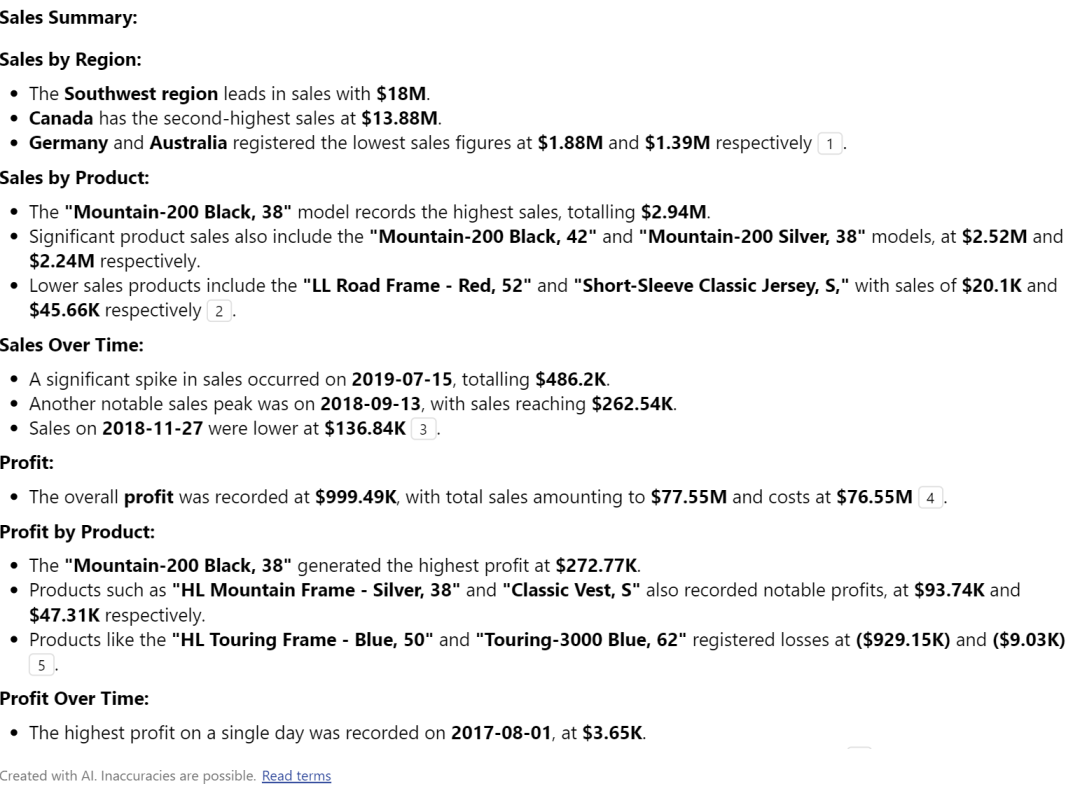
微软PowerBI考试 PL300-使用适用于 Power BI 的 Copilot 创建交互式报表
微软PowerBI考试 PL300-使用适用于 Power BI 的 Copilot 创建交互式报表 Microsoft Power BI 可帮助您通过交互式报表准备数据并对数据进行可视化。 如果您是 Power BI 的新用户,可能很难知道从哪里开始,并且创建报表可能很耗时。 通过适用于 Power BI …...

损坏的RAID5 第十六次CCF-CSP计算机软件能力认证
纯大模拟 提前打好板子 我只通过4个用例点 然后就超时了。 #include<iostream> #include<cstring> #include<algorithm> #include<unordered_map> #include<bits/stdc.h> using namespace std; int n, s, l; unordered_map<int, string>…...

Android USB 通信开发
Android USB 通信开发主要涉及两种模式:主机模式(Host Mode)和配件模式(Accessory Mode)。以下是开发USB通信应用的关键知识点和步骤。 1. 基本概念 主机模式(Host Mode) Android设备作为USB主机,控制连接的USB设备 需要设备支持USB主机功能(通常需要O…...

Prompt提示工程指南#Kontext图像到图像
重要提示:单个prompt的最大token数为512 # 核心能力 Kontext图像编辑系统能够: 理解图像上下文语义实现精准的局部修改保持原始图像风格一致性支持复杂的多步迭代编辑 # 基础对象修改 示例场景:改变汽车颜色 Prompt设计: Change …...
产品经理课程(十一)
(一)复习 1、用户需求不等于产品需求,挖掘用户的本质需求 2、功能设计的前提:不违背我们的产品的基础定位(用一句话阐述我们的产品:工具:产品画布) 3、判断设计好坏的标准…...
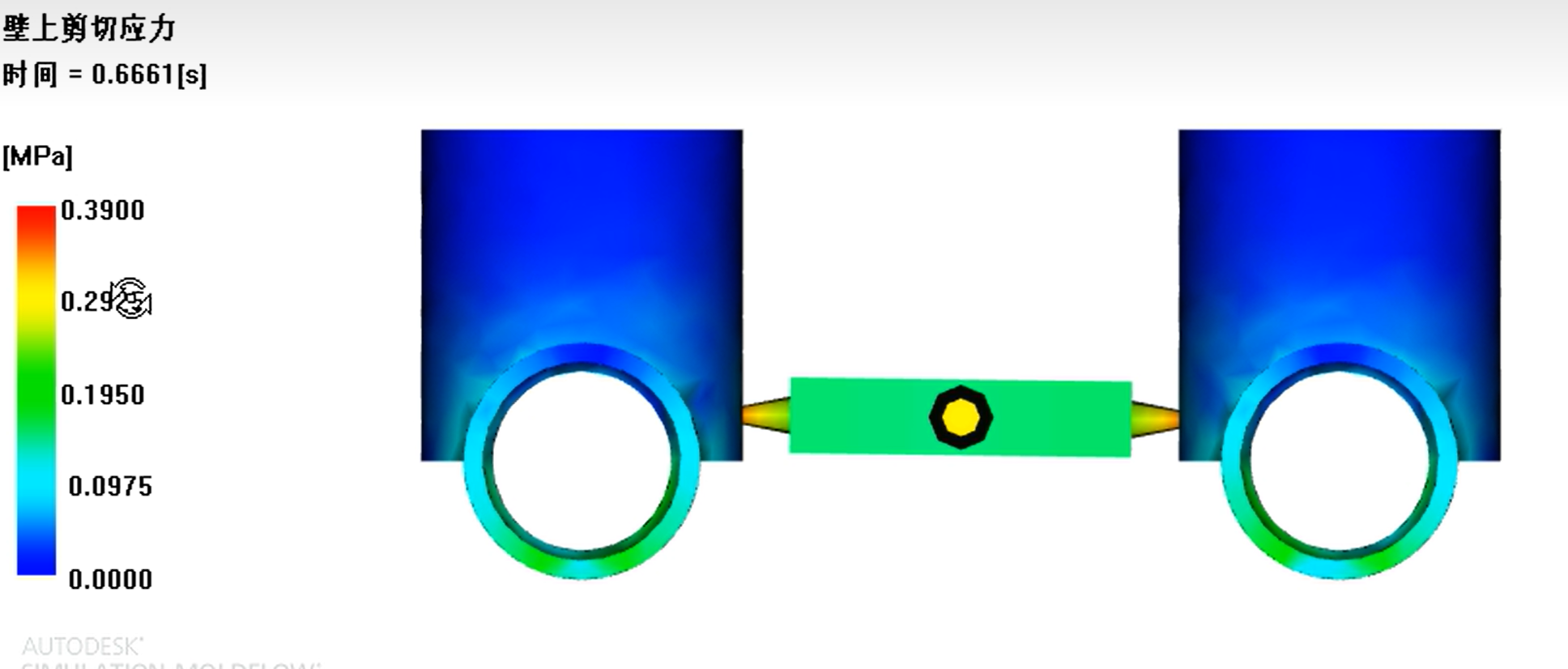
Moldflow充填分析设置
1. 如何选择注塑机: 注塑机初选按注射量来选择: 点网格统计;选择三角形, 三角形体积就是产品的体积 47.7304 cm^3 点网格统计;选择柱体, 柱体的体积就是浇注系统的体积2.69 cm^3 所以总体积产品体积浇注系统体积 47.732.69 cm^3 材料的熔体密度与固体…...
Imprompter: Tricking LLM Agents into Improper Tool Use
原文:Imprompter: Tricking LLM Agents into Improper Tool Use 代码:Reapor-Yurnero/imprompter: Codebase of https://arxiv.org/abs/2410.14923 实机演示:Imprompter 摘要: 新兴发展的Agent可以将LLM与外部资源工具相结合&a…...

python asyncio的作用
协程是可以暂停运行和恢复运行的函数。协程函数是用async定义的函数。它与普通的函数最大的区别是,当执行的时候不会真的执行里面的代码,而是返回一个协程对象,在执行协程对象时才执行里面真正的代码。 例如代码: async def cor…...
【大模型:知识图谱】--3.py2neo连接图数据库neo4j
【图数据库】--Neo4j 安装_neo4j安装-CSDN博客 需要打开图数据库Neo4j, neo4j console 目录 1.图数据库--连接 2.图数据库--操作 2.1.创建节点 2.2.删除节点 2.3.增改属性 2.4.建立关系 2.5.查询节点 2.6.查询关系 3.图数据库--实例 1.图数据库--连接 fr…...

如何理解机器人课程的技术壁垒~壁垒和赚钱是两件不同的事情
答疑: 有部分朋友私聊说博客内容,越来越不适合人类阅读习惯…… 可以做这种理解,我从23年之后,博客会不会就是写给机器看的。 或者说我在以黑盒方式测试AI推荐的风格。 主观-客观-主观螺旋式发展过程。 2015最早的一篇博客重…...

如何从零开始建设一个网站?
当你没有建站的基础和建站的知识,那么应该如何开展网站建设和网站管理。而今天的教程是不管你是为自己建站还是为他人建站都适合的。本教程会指导你如何进入建站,将建站的步骤给大家分解: 首先我们了解一下,建站需要那些步骤和流程…...
selinux firewalld
一、selinux 1.说明 SELinux 是 Security-Enhanced Linux 的缩写,意思是安全强化的 linux; SELinux 主要由美国国家安全局(NSA)开发,当初开发的目的是为了避免资源的误用 DAC(Discretionary Access Cont…...
408第一季 - 数据结构 - 字符串和KMP算法
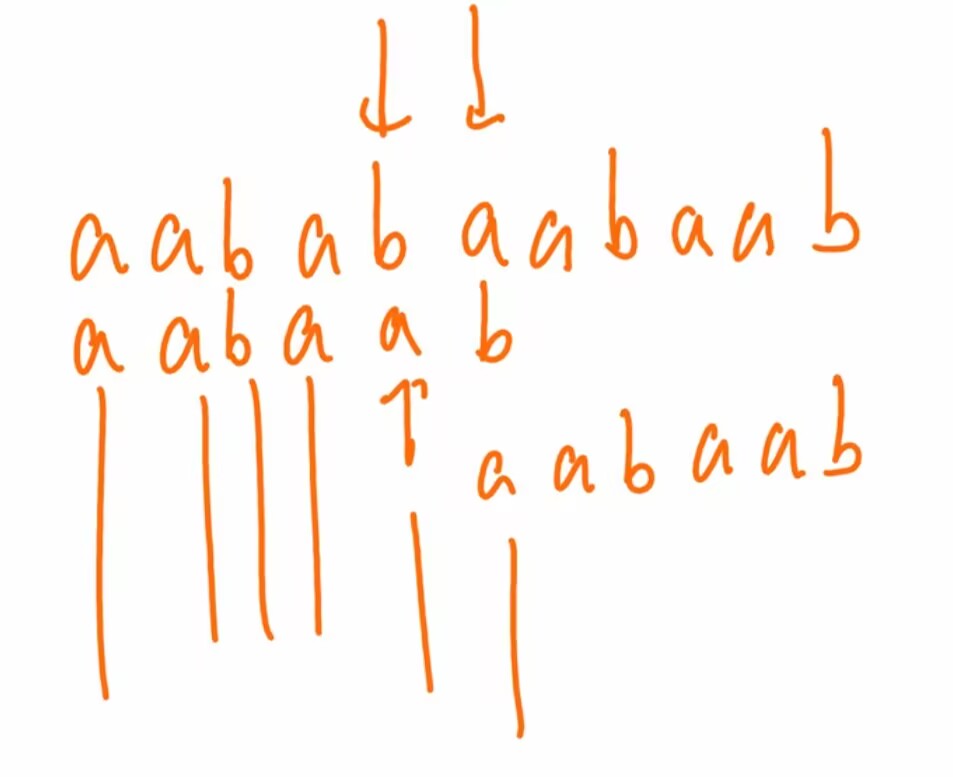
闲聊 这章属于难点但考频低 3个名词记一下:模式匹配,主串,字串(模式串) 举个例子 主串 aabaaaabaab 字串 aabaab 模式匹配 从主串找到字串 暴力解法 也是不多说 很暴力就是了 KMP算法 next数组 它只和字串有关 先…...

如何查看自己电脑安装的Java——JDK
开始->运行->然后输入cmd进入dos界面 (快捷键windows->输入cmd) 输入java -version,回车 出现了一下信息就是安装了jdk 输入java -verbose,回车 查看安装目录...

青少年编程与数学 01-011 系统软件简介 07 iOS操作系统
青少年编程与数学 01-011 系统软件简介 07 iOS操作系统 一、发展历程(一)诞生初期(2007 - 2008年)(二)功能拓展与升级(2009 - 2013年)(三)持续优化与创新&…...
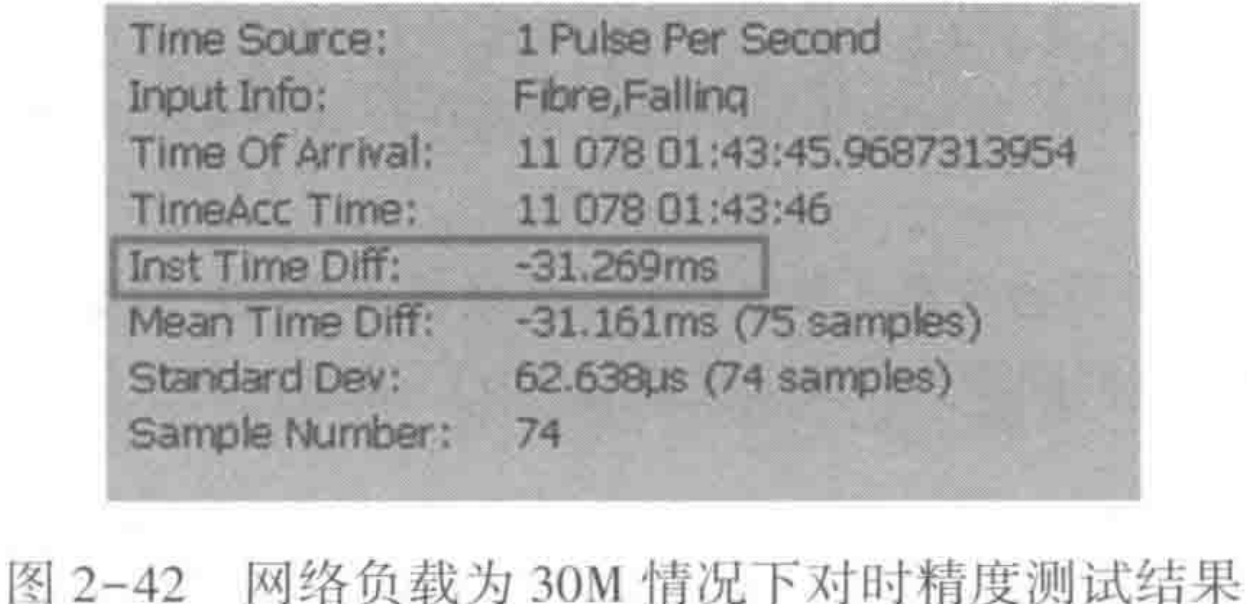
电力系统时间同步系统之三
2.6 电力系统时间同步装置 时间同步装置主要完成时间信号和时间信息的同步传递,并提供相应的时间格式和物理接口。时间同步装置主要由三大部分组成:时间输入、内部时钟和时间输出,如图 2-25 所示。输入装置的时间信号和时间信息的精度必须不…...
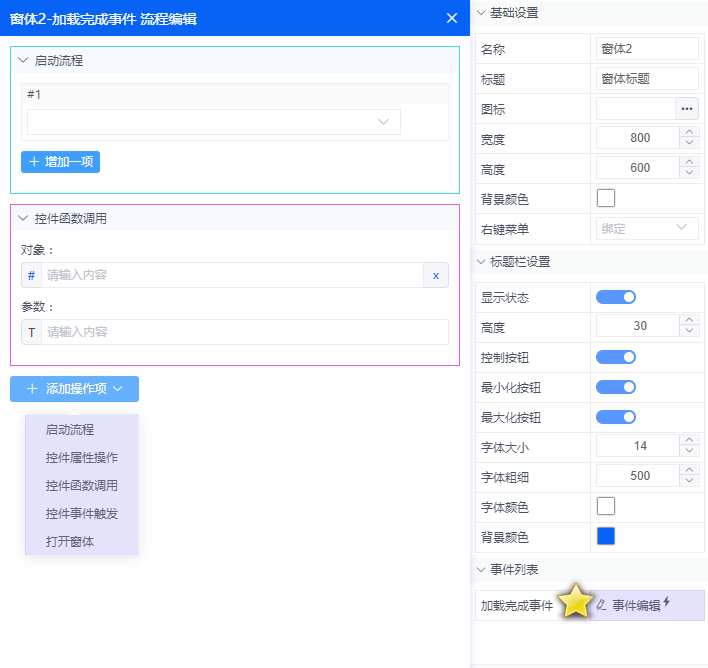
火语言RPA--界面应用详解
新建一个界面应用后,软件将自动弹出一个界面设计器,本篇将介绍下流程设计器中各部分的功能。 UI控件列表 显示软件中自带的所有UI控件流程库 流程是颗粒组件的容器,可在建立的流程中添加颗粒组件编写成规则流程。 流程编辑好后再绑定UI控件…...
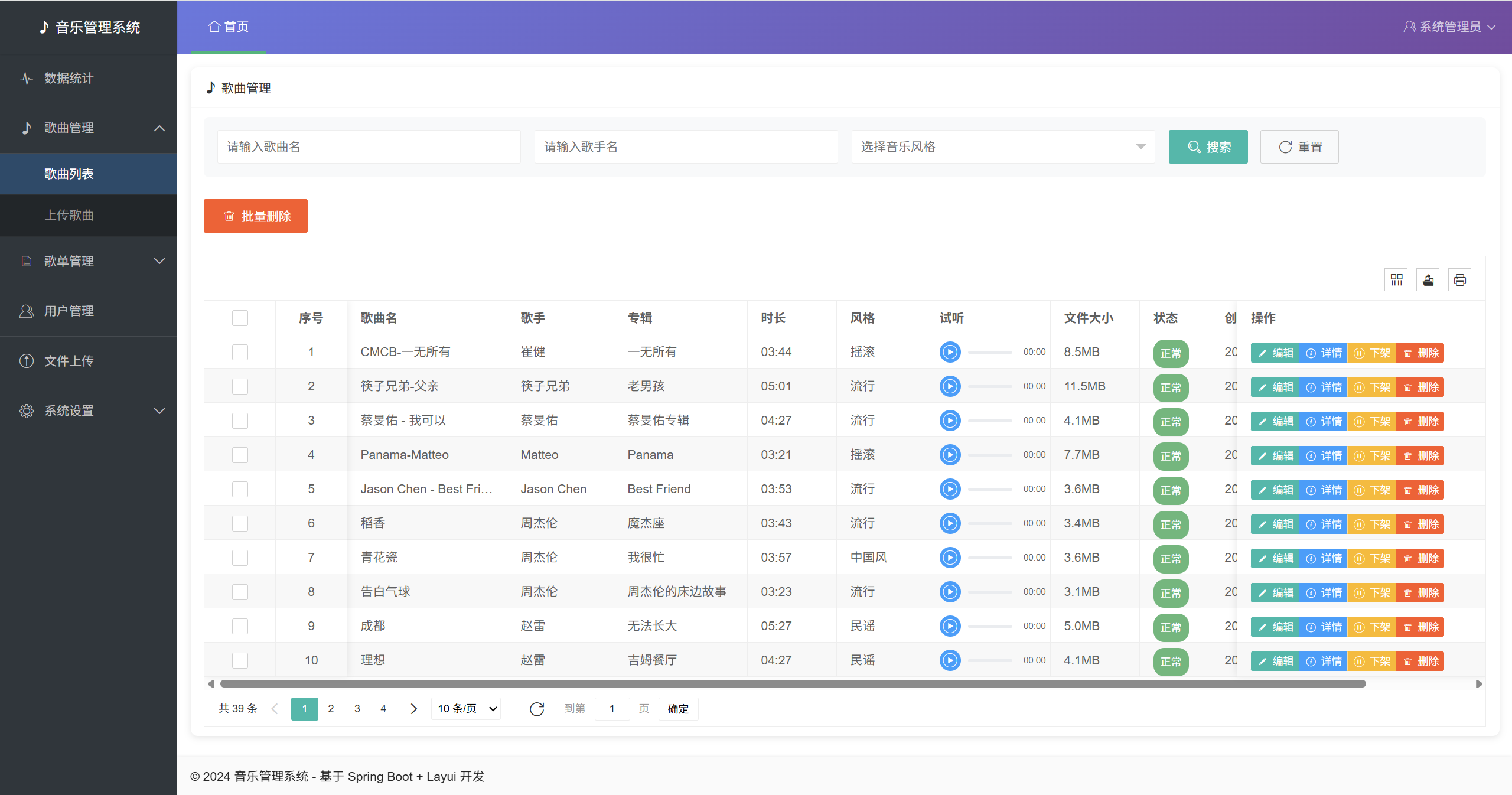
基于Spring Boot的云音乐平台设计与实现
基于Spring Boot的云音乐平台设计与实现——集成协同过滤推荐算法的全栈项目实战 📖 文章目录 项目概述技术选型与架构设计数据库设计后端核心功能实现推荐算法设计与实现前端交互设计系统优化与性能提升项目部署与测试总结与展望 项目概述 🎯 项目背…...
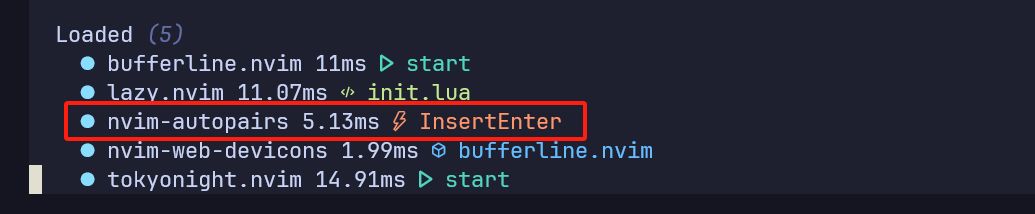
Neovim - 打造一款属于自己的编辑器(一)
文章目录 前言(劝退)neovim 安装neovim 配置配置文件位置第一个 hello world 代码拆分 neovim 配置正式配置 neovim基础配置自定义键位Lazy 插件管理器配置tokyonight 插件配置BufferLine 插件配置自动补全括号 / 引号 插件配置 前言(劝退&am…...
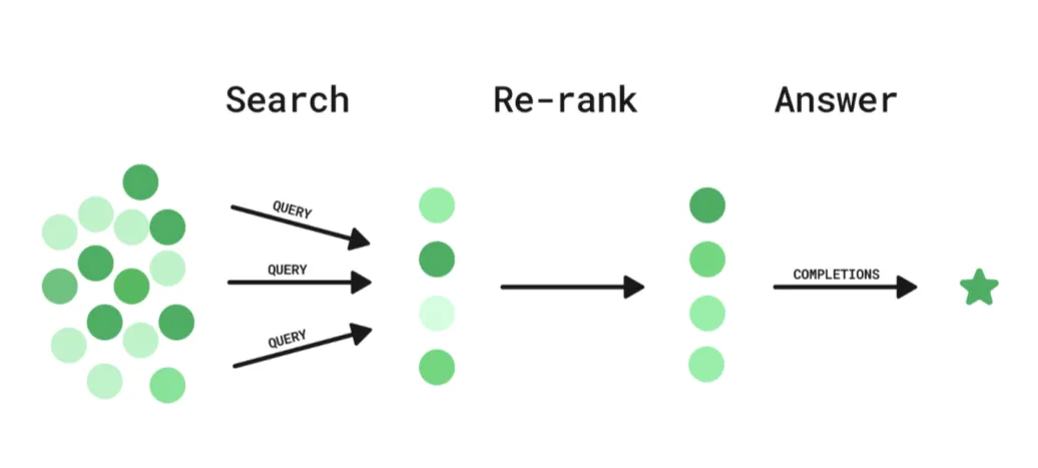
RAG检索系统的两大核心利器——Embedding模型和Rerank模型
在RAG系统中,有两个非常重要的模型一个是Embedding模型,另一个则是Rerank模型;这两个模型在RAG中扮演着重要角色。 Embedding模型的作用是把数据向量化,通过降维的方式,使得可以通过欧式距离,余弦函数等计算…...
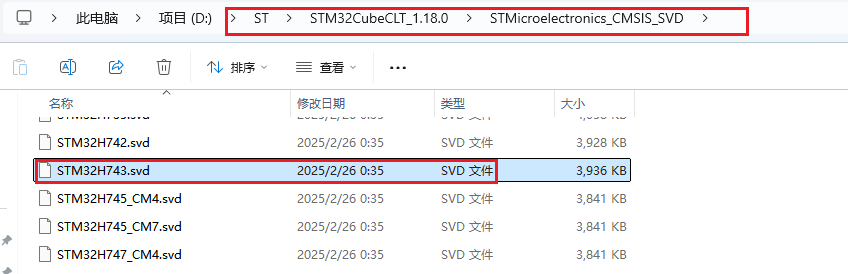
CLion社区免费后,使用CLion开发STM32相关工具资源汇总与入门教程
Clion下载与配置 Clion推出社区免费,就是需要注册一个账号使用,大家就不用去找破解版版本了,jetbrains家的IDEA用过的都说好,这里嵌入式领域也推荐使用。 CLion官网下载地址 安装没有什么特别,下一步就好。 启动登录…...
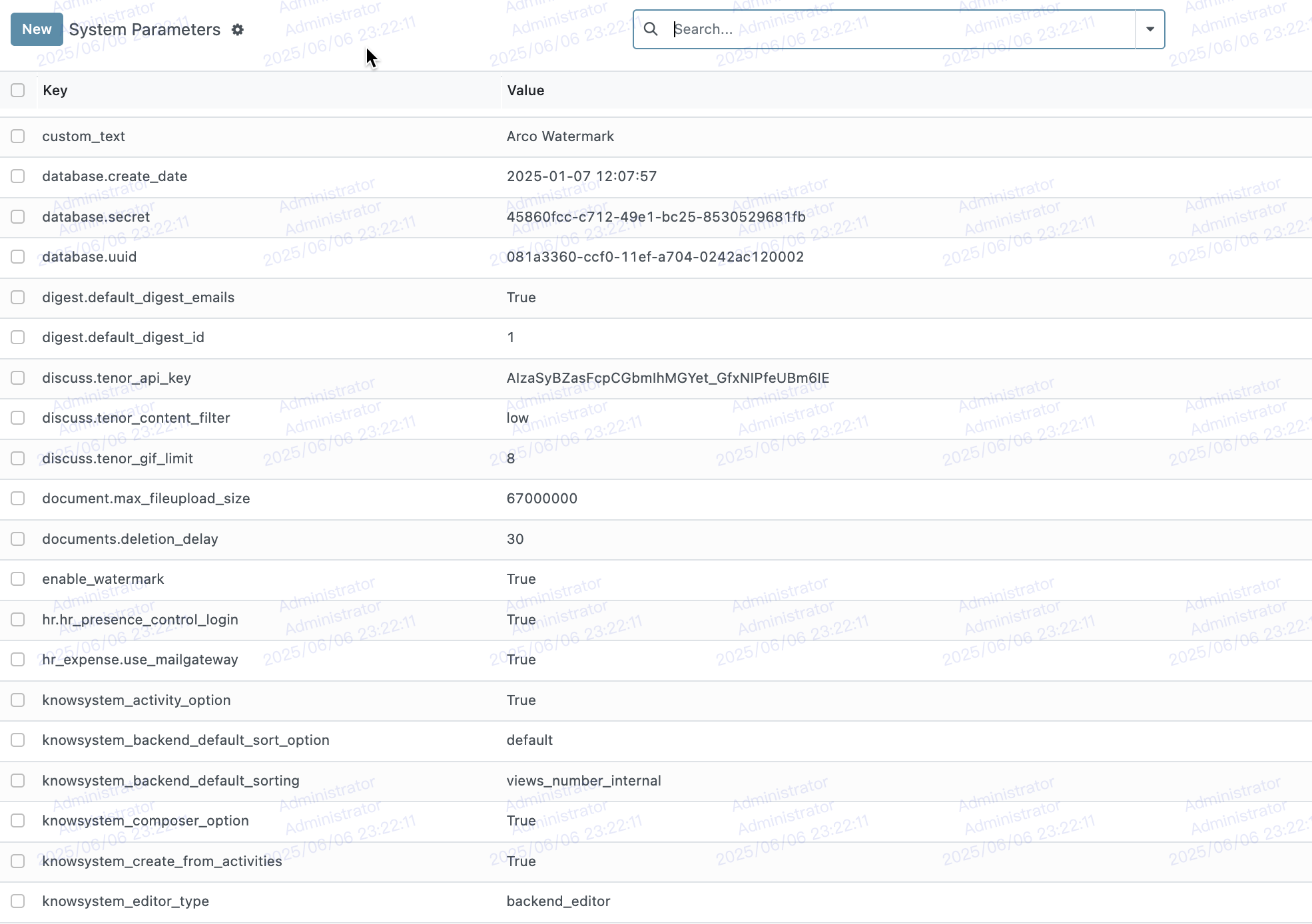
第21讲、Odoo 18 配置机制详解
Odoo 18 配置机制详解:res.config.settings 与 ir.config_parameter 原理与实战指南 在现代企业信息化系统中,灵活且可维护的系统参数配置是模块开发的核心能力之一。Odoo 作为一款高度模块化的企业管理软件,其参数配置机制主要依赖于两个关…...

LinkedList、Vector、Set
LinkedList 基本概念 LinkedList 是一个双向链表的实现类,它实现了 List、Deque、Queue 和 Cloneable 接口,底层使用双向链表结构,适合频繁插入和删除操作。 主要特点 有序,可重复。 查询速度较慢,插入/删除速度较…...

SQL 基础入门
SQL 基础入门 SQL(全称 Structured Query Language,结构化查询语言)是用于操作关系型数据库的标准语言,主要用于数据的查询、新增、修改和删除。本文面向初学者,介绍 SQL 的基础概念和核心操作。 1. 常见的 SQL 数据…...