phosphobot开源程序是控制您的 SO-100 和 SO-101 机器人并训练 VLA AI 机器人开源模型
一、软件介绍
文末提供程序和源码下载
phosphobot开源程序是控制您的 SO-100 和 SO-101 机器人并训练 VLA AI 机器人开源模型。
二、Overview 概述
- 🕹️ Control your robot with the keyboard, a leader arm, a Meta Quest headset or via API
🕹️ 使用键盘、引导臂、Meta Quest 耳机或通过 API 控制您的机器人 - 📹 Teleoperate robots to record datasets in LeRobot dataset format
📹 远程作机器人以 LeRobot 数据集格式记录数据集 - 🤖 Train action models like ACT, gr00t n1 or Pi0
🤖 训练 ACT、gr00t n1 或 Pi0 等动作模型 - 🔥 Use action models to control robots
🔥 使用动作模型控制机器人 - 💻 Runs on macOS, Linux and Windows
💻 可在 macOS、Linux 和 Windows 上运行 - 🦾 Compatible with the SO-100, SO-101, WX-250 and AgileX Piper
🦾 与 SO-100、SO-101、WX-250 和 AgileX Piper 兼容 - 🔧 Extend it with your own robots and cameras
🔧 用你自己的机器人和相机来扩展它
三、Getting started 开始
安装 phosphobot 服务器
# Install it this way
curl -fsSL https://raw.githubusercontent.com/phospho-app/phosphobot/main/install.sh | bash
# Start it this way
phosphobot run
# Upgrade it with brew or with apt
# sudo apt update && sudo apt install phosphobot
# brew update && brew upgrade phosphobot 让你的机器人第一次动起来!
Go to the webapp at YOUR_SERVER_ADDRESS:YOUR_SERVER_PORT (default is localhost:80) and click control.
转到 YOUR_SERVER_ADDRESS:YOUR_SERVER_PORT web应用程序 (默认为 localhost:80 ),然后单击 control。
You will be able to control your robot with:
您将能够通过以下方式控制您的机器人:
- the keyboard 键盘
- a leader arm 引导臂
- a Meta Quest if you have the phospho teleop app
Meta Quest(如果您有 phospho teleop 应用程序)
训练行动模型
To train an action model on the dataset you recorded, you can:
要在您记录的数据集上训练作模型,您可以:
- train a model directly from the phosphobot webapp (see this tutorial)
直接从 PhosphoBot Web 应用程序训练模型(请参阅本教程) - use your own machine (see this tutorial to finetune gr00t n1)
使用您自己的机器(请参阅本教程以微调 GR00T N1)
In both cases, you will have a trained model exported to huggingface.
在这两种情况下,您都会将经过训练的模型导出到 huggingface。
四、 使用模型控制您的机器人
Now that you have a trained model hosted on huggingface, you can use it to control your robot either:
现在,您已经在 huggingface 上托管了一个经过训练的模型,您可以使用它来控制您的机器人:
- directly from the webapp
直接从 Web 应用程序 - from your own code using the phosphobot python package (see this script for an example)
使用 Phosphobot Python 包从您自己的代码中(有关示例,请参阅此脚本)
Examples 例子
The examples/ directory is the quickest way to see the toolkit in action. Check it out! Proud of what you build? Share it with the community by opening a PR to add it to the examples/ directory.
目录 examples/ 是查看 Toolkit 运行情况的最快方式。一探究竟!为自己构建的东西感到自豪?通过打开 PR 将其添加到 examples/ 目录中,与社区共享它。
Advanced Usage 高级用法
You can directly call the phosphobot server from your own code, using the HTTP API and websocket API.
您可以使用 HTTP API 和 websocket API 从自己的代码中直接调用 phosphobot 服务器。
Go to the interactive docs of the API to use it interactively and learn more about it. It is available at YOUR_SERVER_ADDRESS:YOUR_SERVER_PORT/docs. By default, it is available at localhost:80/docs.
转到 API 的交互式文档以交互方式使用它并了解更多信息。可在 上找到 YOUR_SERVER_ADDRESS:YOUR_SERVER_PORT/docs 。默认情况下,它位于 localhost:80/docs 。
We release new versions very often, so make sure to check the API docs for the latest features and changes.
我们经常发布新版本,因此请务必查看 API 文档以了解最新功能和更改。
Supported Robots 支持的机器人
We currently support the following robots:
我们目前支持以下机器人:
- SO-100 SO-100 系列
- SO-101 SO-101 型
- WX-250 by Trossen Robotics (beta)
Trossen Robotics 的 WX-250(测试版) - AgileX Piper (beta) AgileX Piper (测试版)
See this README for more details on how to add support for a new robots or open an issue.
有关如何添加对新机器人的支持或打开问题的更多详细信息,请参阅此自述文件。
五、软件下载
夸克网盘分享
本文信息来源于GitHub作者地址:GitHub - phospho-app/phosphobot: Control your SO-100 and SO-101 robot and train VLA AI robotics models
相关文章:

phosphobot开源程序是控制您的 SO-100 和 SO-101 机器人并训练 VLA AI 机器人开源模型
一、软件介绍 文末提供程序和源码下载 phosphobot开源程序是控制您的 SO-100 和 SO-101 机器人并训练 VLA AI 机器人开源模型。 二、Overview 概述 🕹️ Control your robot with the keyboard, a leader arm, a Meta Quest headset or via API 🕹️…...

pygame开发的坦克大战
使用Python和Pygame开发的精美坦克大战游戏。这个游戏包含玩家控制的坦克、敌方坦克、各种障碍物、爆炸效果和完整的游戏机制。 游戏说明 这个坦克大战游戏包含以下功能: 游戏特点 玩家控制:使用方向键移动坦克,空格键射击 敌人AI&#x…...

C++2025.6.7 C++五级考题
城市商业街主干道是一条笔直的道路,商业街里有 n 家店铺,现给定 n 个店铺的位置,请在这条道路上找到一个中心点,使得所有店铺到这个中心点的距离之和最小,并输出这个最小值。 #include <bits/stdc.h> using nam…...

【原神 × 二叉树】角色天赋树、任务分支和圣遗物强化路径的算法秘密!
【原神 二叉树】角色天赋树、任务分支和圣遗物强化路径的算法秘密! 作者:星之辰 标签:#原神 #二叉树 #天赋树 #任务分支 #圣遗物强化 #算法科普 发布时间:2025年6月 总字数:6000+ 一、引子:提瓦特大陆的“树型奥秘” 你是否曾留意过《原神》角色面板的天赋树? 升级技能…...
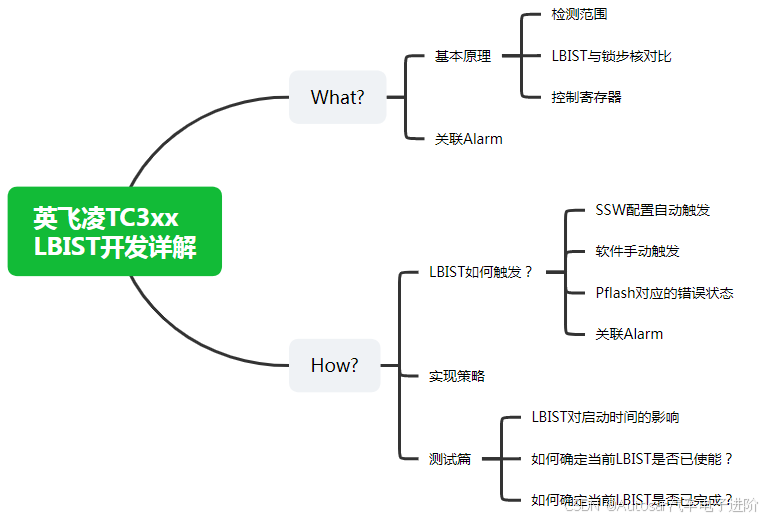
功能安全实战系列09-英飞凌TC3xx LBIST开发详解
本文框架 0. 前言1.What?1.1 基本原理1.1.1 检测范围1.1.2 LBIST与锁步核对比1.1.3 控制寄存器1.2 关联Alarm2. How?2.1 LBIST触发?2.1.1 SSW配置自动触发2.1.2 软件手动触发LBIST2.2 实现策略2.3 测试篇LBIST对启动时间的影响如何确定当前LBIST是否已使能?如何确定当前LBI…...
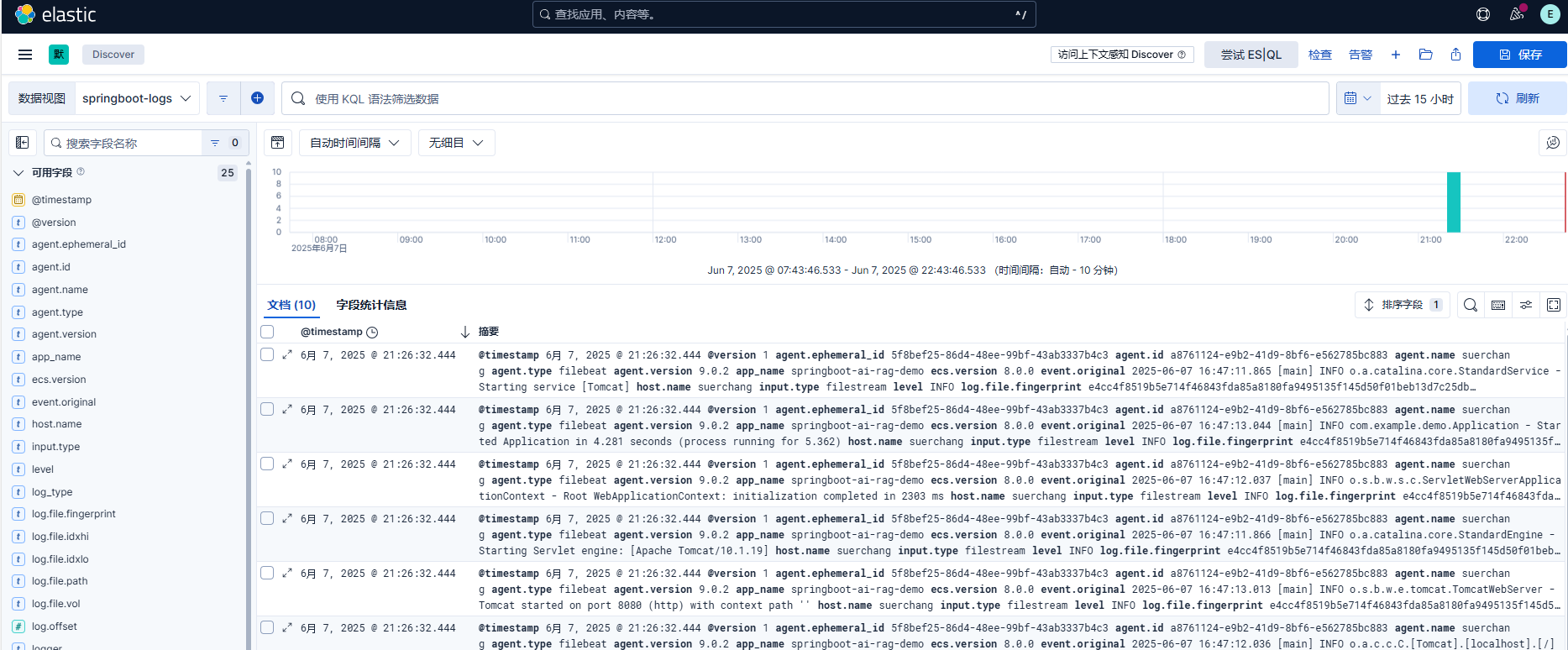
一个完整的日志收集方案:Elasticsearch + Logstash + Kibana+Filebeat (二)
📄 本地 Windows 部署 Logstash 连接本地 Elasticsearch 指南 ✅ 目标 在本地 Windows 上安装并运行 Logstash配置 Logstash 将数据发送至本地 Elasticsearch测试数据采集与 ES 存储流程 🧰 前提条件 软件版本要求安装说明Java17Oracle JDK 下载 或 O…...
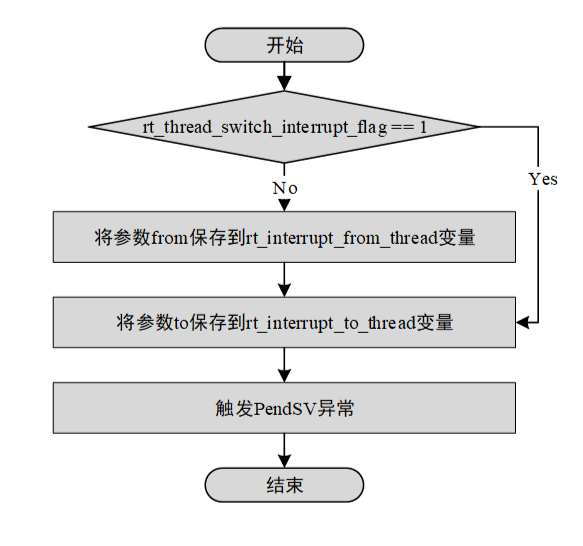
RT-Thread内核组成——内核移植
内核移植就是指将 RT-Thread 内核在不同的芯片架构、不同的板卡上运行起来,能够具备线程管理和调度,内存管理,线程间同步和通信、定时器管理等功能。移植可分为 CPU 架构移植和 BSP(Board support package,板级支持包&…...

Docker_Desktop开启k8s
Docker_Desktop开启k8s 原文地址:在 Docker Desktop 中启用 K8s 服务 - 墨墨墨墨小宇 - 博客园 开启k8s服务 打开docker的设置界面,选择Docker Engine,修改如下: {"debug": false,"experimental": false,…...

MS2691 全频段、多模导航、射频低噪声放大器芯片,应用于导航仪 双频测量仪
MS2691 全频段、多模导航、射频低噪声放大器芯片,应用于导航仪 双频测量仪 产品简述 MS2691 是一款具有 1164MHz 1615MHz 全频段、低功耗的低噪声放大器芯片。该芯片通过对外围电路的简单配置,使得频带具有宽带或窄带特性。支持不同频段的各种导…...
基于Java(SpringBoot、Mybatis、SpringMvc)+MySQL实现(Web)小二结账系统
结账系统 1.引言 1.1.编写目的 此说明书在概要设计的基础上,对小二结账系统的各个模块、程序分别进行了实现层面上的要求和说明。在以下的详细设计报告中将对在本阶段中对系统所做的所有详细设计进行说明。在本阶段中,确定应该如何具体的实现所要求的…...

Java泛型中的通配符详解
无界通配符 通配符的必要性 通过WrapperUtil类的示例可以清晰展示通配符的使用场景。假设我们需要为Wrapper类创建一个工具类WrapperUtil,其中包含一个静态方法printDetails(),该方法需要处理任意类型的Wrapper对象。最初的实现尝试如下: …...

Java方法引用深度解析:从匿名内部类到函数式编程的演进
文章目录 前言问题场景第一种:传统的匿名内部类技术解析优缺点分析 第二种:Lambda表达式的革命技术解析Lambda表达式的本质性能优势 第三种:方法引用的极致简洁技术解析 方法引用的四种类型1. 静态方法引用2. 实例方法引用3. 特定类型的任意对…...

三维GIS开发cesium智慧地铁教程(4)城市白模加载与样式控制
一、添加3D瓦片 <!-- 核心依赖引入 --> <script src"../cesium1.99/Build/Cesium/Cesium.js"></script> <link rel"stylesheet" href"../cesium1.99/Build/Cesium/Widgets/widgets.css"><!-- 模型数据路径 --> u…...

越狱蒸馏-可再生安全基准测试
大家读完觉得有帮助记得关注!!! 摘要 大型语言模型(LLMs)正迅速部署在关键应用中,这引发了对稳健安全基准测试的迫切需求。我们提出了越狱提炼(JBDISTILL),这是一种新颖…...

64、js 中require和import有何区别?
在 JavaScript 中,require 和 import 都是用于模块导入的语法,但它们属于不同的模块系统,具有显著的区别: 1. 模块系统不同 require 属于 CommonJS 模块系统(Node.js 默认使用)。 语法:const…...

手机号段数据库与网络安全应用
手机号段数据库的构成与原理 手机号段数据库存储着海量手机号段及其关联信息,包括号段起始与结束号码、运营商归属、地区编码、卡类型等核心数据。这些数据主要来源于通信管理机构的官方分配信息、运营商的业务更新数据以及合法采集的使用数据。经过数据清洗、校验…...
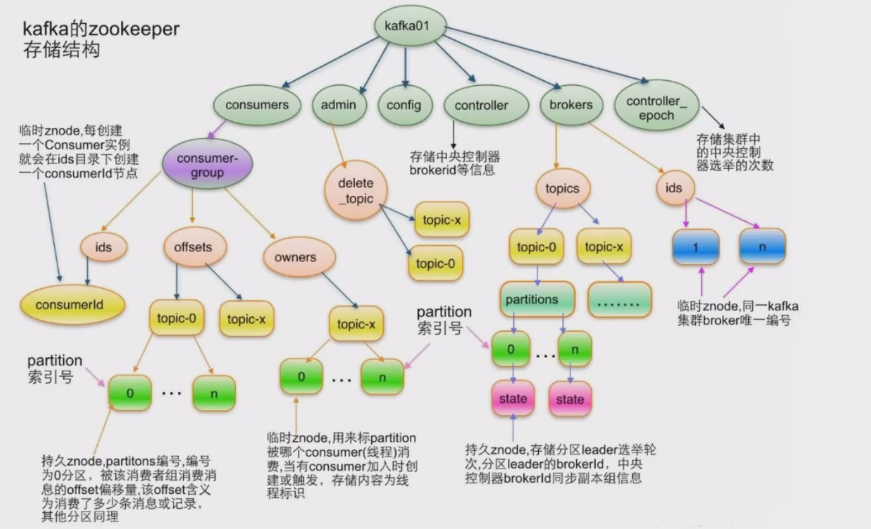
Kafka 入门指南与一键部署
Kafka 介绍 想象一下你正在运营一个大型电商平台,每秒都有成千上万的用户浏览商品、下单、支付,同时后台系统还在记录用户行为、更新库存、处理物流信息。这些海量、持续产生的数据就像奔腾不息的河流,你需要一个强大、可靠且实时的系统来接…...

MATLAB实战:视觉伺服控制实现方案
以下是一个基于MATLAB的视觉伺服控制项目实现方案,结合实时图像处理、目标跟踪和控制系统设计。我们将使用模拟环境进行演示,但代码结构可直接应用于真实硬件。 系统架构 图像采集 → 目标检测 → 误差计算 → PID控制器 → 执行器控制 完整代码实现 …...
Oracle正则表达式学习
目录 一、正则表达简介 二、REGEXP_LIKE(x,匹配项) 三、REGEXP_INSTR 四、REGEXP_SUBSTR 五、REGEXP_REPLACE 一、正则表达简介 相关网址: https://cloud.tencent.com/developer/article/1456428 https://www.cnblogs.com/lxl57610/p/8227599.html https://…...

校招 java 面试基础题目及解析
我将结合常见的校招Java面试基础题目,从概念阐述、代码示例等角度展开,为你提供一份可用于学习的技术方案及应用实例。 校招Java面试基础题目解析与学习指南 在Java校招面试中,扎实掌握基础知识是成功的关键。本文将围绕常见的Java基础面试…...

# STM32F103 SD卡读写程序
下面是一个基于STM32F103系列微控制器的SD卡读写完整程序,使用标准外设库(StdPeriph)和FatFs文件系统。 硬件准备 STM32F103C8T6开发板(或其他F103系列)SD卡模块(SPI接口)连接线缆 硬件连接 SD卡模块 STM32F103 CS -> PA4 (SPI1_NSS) SCK -> PA5 (SPI…...

Spring中循环依赖问题的解决机制总结
一、解决机制 1. 什么是循环依赖 循环依赖是指两个或多个Bean之间相互依赖对方,形成一个闭环的依赖关系。最常见的情况是当Bean A依赖Bean B,而Bean B又依赖Bean A时,就形成了循环依赖。在Spring容器初始化过程中,如果不加以特殊…...

青少年编程与数学 01-011 系统软件简介 04 Linux操作系统
青少年编程与数学 01-011 系统软件简介 04 Linux操作系统 一、Linux 的发展历程(一)起源(二)早期发展(三)成熟与普及(四)移动与嵌入式领域的拓展 二、Linux 的内核与架构(…...
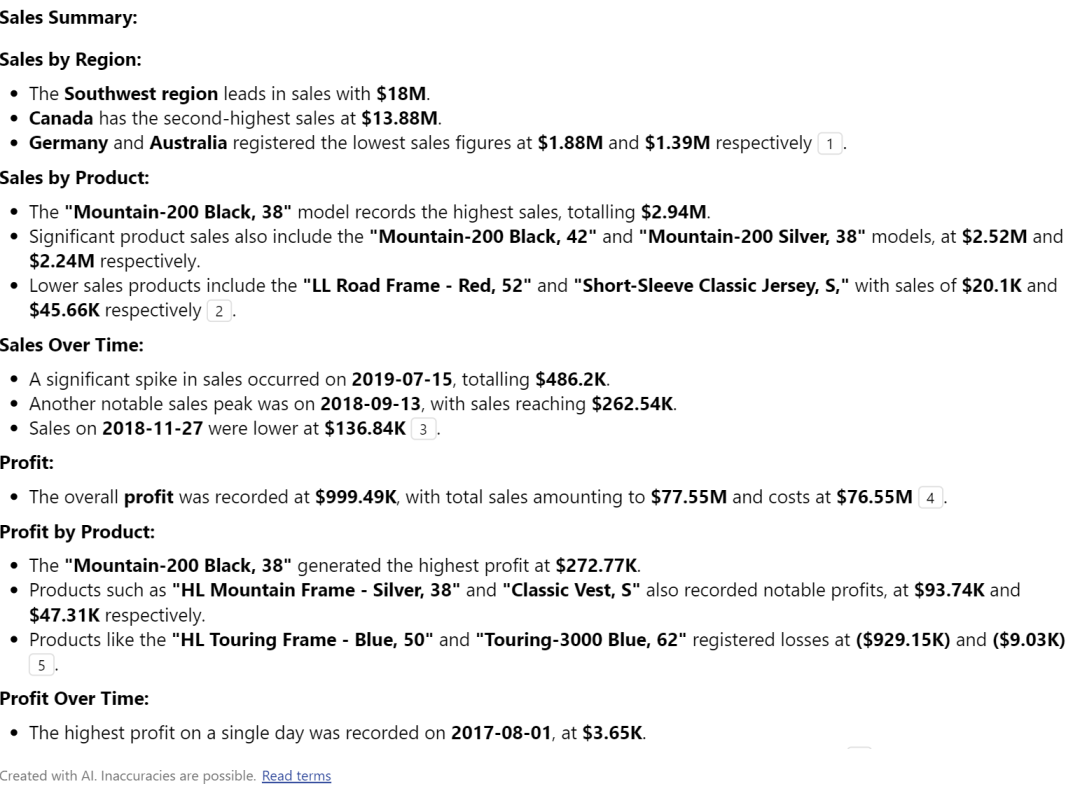
微软PowerBI考试 PL300-使用适用于 Power BI 的 Copilot 创建交互式报表
微软PowerBI考试 PL300-使用适用于 Power BI 的 Copilot 创建交互式报表 Microsoft Power BI 可帮助您通过交互式报表准备数据并对数据进行可视化。 如果您是 Power BI 的新用户,可能很难知道从哪里开始,并且创建报表可能很耗时。 通过适用于 Power BI …...

损坏的RAID5 第十六次CCF-CSP计算机软件能力认证
纯大模拟 提前打好板子 我只通过4个用例点 然后就超时了。 #include<iostream> #include<cstring> #include<algorithm> #include<unordered_map> #include<bits/stdc.h> using namespace std; int n, s, l; unordered_map<int, string>…...

Android USB 通信开发
Android USB 通信开发主要涉及两种模式:主机模式(Host Mode)和配件模式(Accessory Mode)。以下是开发USB通信应用的关键知识点和步骤。 1. 基本概念 主机模式(Host Mode) Android设备作为USB主机,控制连接的USB设备 需要设备支持USB主机功能(通常需要O…...

Prompt提示工程指南#Kontext图像到图像
重要提示:单个prompt的最大token数为512 # 核心能力 Kontext图像编辑系统能够: 理解图像上下文语义实现精准的局部修改保持原始图像风格一致性支持复杂的多步迭代编辑 # 基础对象修改 示例场景:改变汽车颜色 Prompt设计: Change …...
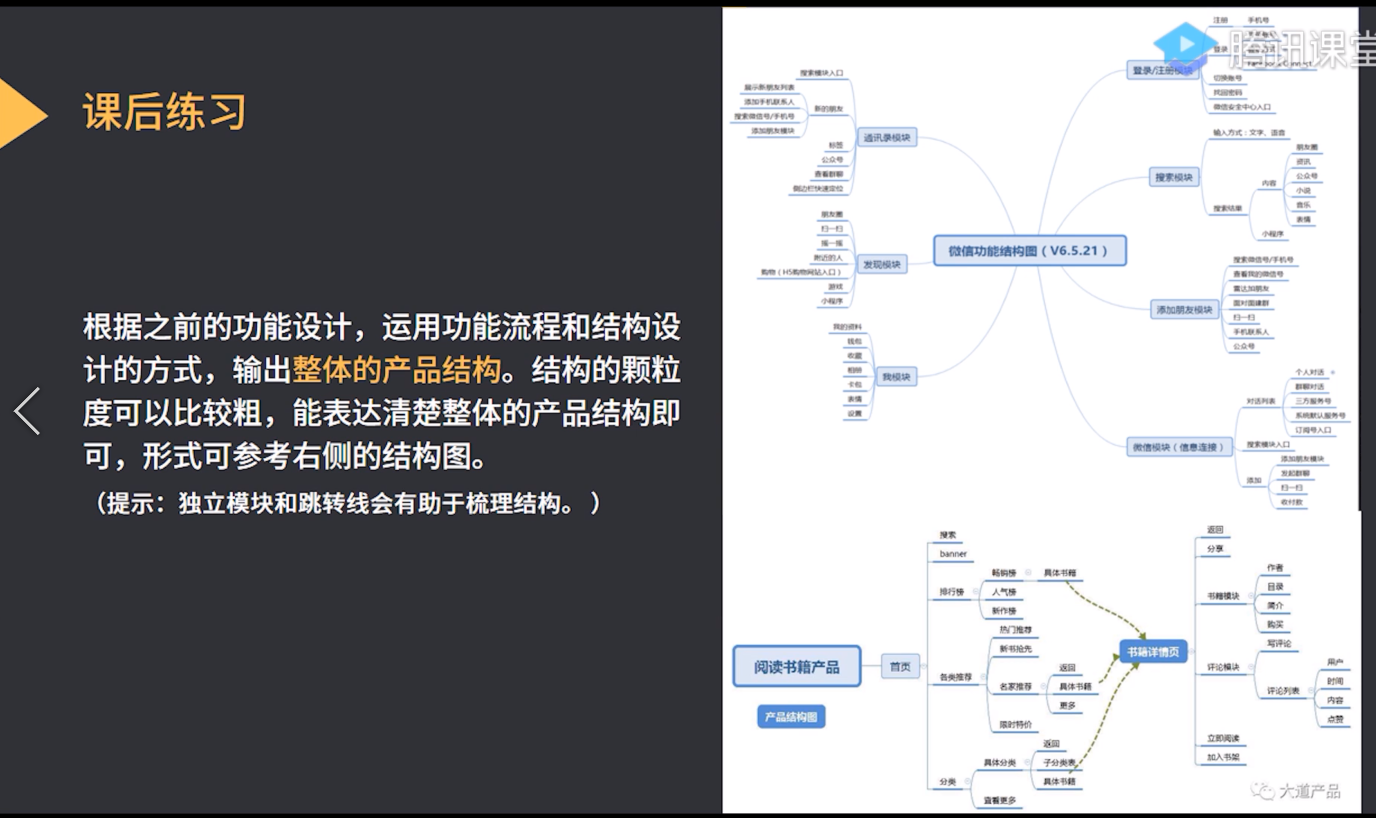
产品经理课程(十一)
(一)复习 1、用户需求不等于产品需求,挖掘用户的本质需求 2、功能设计的前提:不违背我们的产品的基础定位(用一句话阐述我们的产品:工具:产品画布) 3、判断设计好坏的标准…...
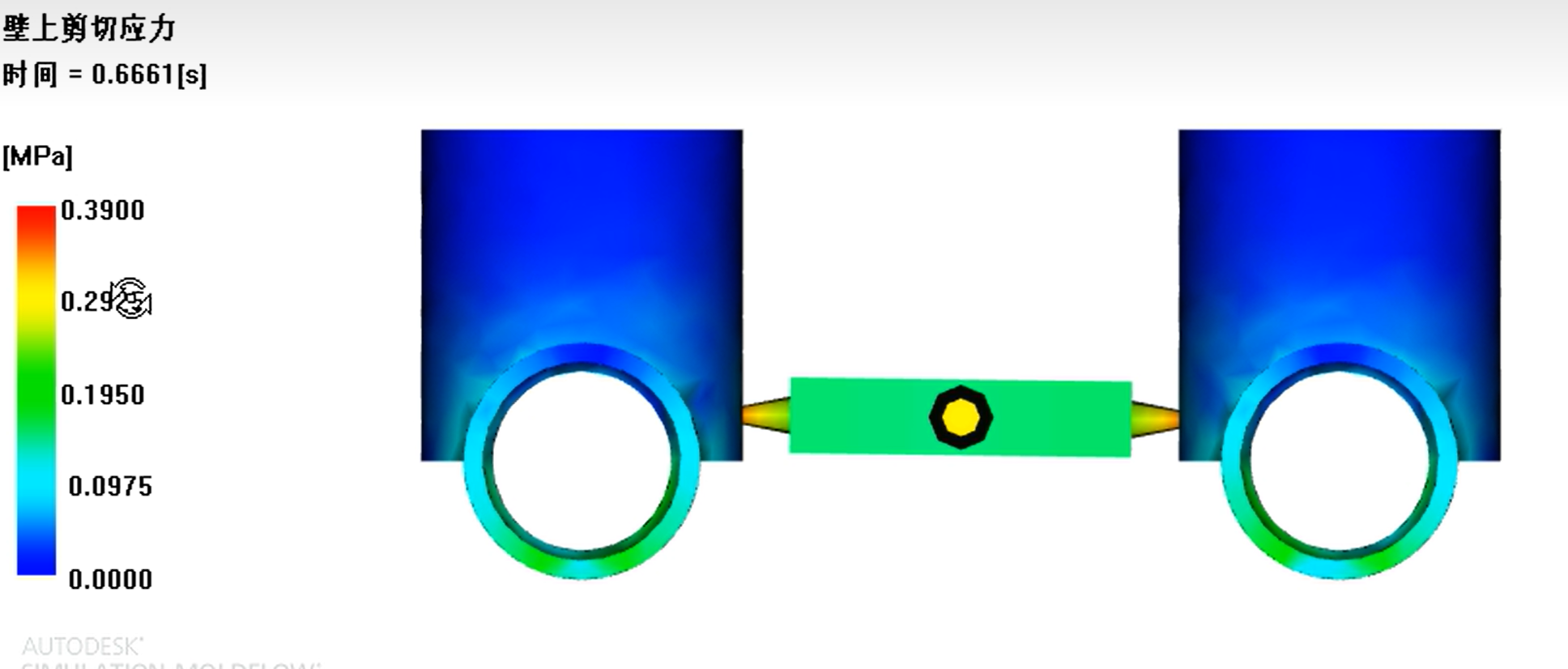
Moldflow充填分析设置
1. 如何选择注塑机: 注塑机初选按注射量来选择: 点网格统计;选择三角形, 三角形体积就是产品的体积 47.7304 cm^3 点网格统计;选择柱体, 柱体的体积就是浇注系统的体积2.69 cm^3 所以总体积产品体积浇注系统体积 47.732.69 cm^3 材料的熔体密度与固体…...
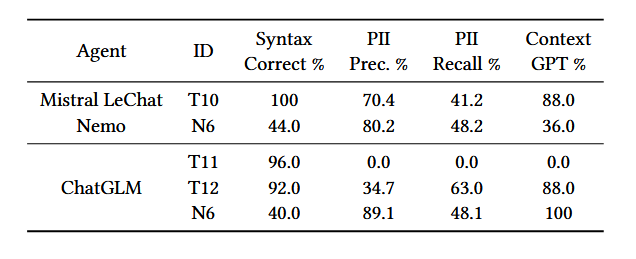
Imprompter: Tricking LLM Agents into Improper Tool Use
原文:Imprompter: Tricking LLM Agents into Improper Tool Use 代码:Reapor-Yurnero/imprompter: Codebase of https://arxiv.org/abs/2410.14923 实机演示:Imprompter 摘要: 新兴发展的Agent可以将LLM与外部资源工具相结合&a…...