ROS2,工作空间中新建了一个python脚本,需要之后作为节点运行。告诉我步骤?
提问
ROS2,工作空间中新建了一个python脚本,需要之后运行。告诉我步骤?
大概要包括而不限于:chmod给可执行权限、setup.py中entry point的配置,如果在launch文件中要使用,还涉及到launch.py文件的配置。最后还要编译(选择功能包编译的执行命令是什么?)
详细步骤提供一下
回答
在 ROS2 中,向工作空间中新建一个 Python 脚本并能够运行它,通常涉及以下几个主要步骤:
🧱 假设前提
- 使用的是 ROS2(如 Foxy、Humble、Iron 等)
- 使用
colcon构建系统 - 工作空间名为
ros2_ws,功能包名为my_package
✅ 步骤详解
1️⃣ 在功能包中创建 Python 脚本
路径:ros2_ws/src/my_package/my_package/hello.py
#!/usr/bin/env python3def main():print("Hello from my Python node!")if __name__ == '__main__':main()
2️⃣ 赋予执行权限
在终端中执行:
chmod +x ros2_ws/src/my_package/my_package/hello.py
3️⃣ 配置 setup.py
在 ros2_ws/src/my_package/setup.py 中添加 entry_points:
from setuptools import setuppackage_name = 'my_package'setup(name=package_name,version='0.0.0',packages=[package_name],data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'],zip_safe=True,maintainer='Your Name',maintainer_email='your@email.com',description='Example Python node',license='MIT',tests_require=['pytest'],entry_points={'console_scripts': ['hello_node = my_package.hello:main',],},
)
这一步很关键,hello_node 是你之后在终端运行的命令。
4️⃣ 编译功能包(而不是整个工作空间)
cd ros2_ws
colcon build --packages-select my_package
构建成功后记得 source:
source install/setup.bash
5️⃣ 验证运行
现在可以直接运行:
ros2 run my_package hello_node
6️⃣ 在 Launch 文件中调用(可选)
如果你希望通过 Launch 文件来启动该脚本,需要:
创建 launch/my_launch.py 文件:
from launch import LaunchDescription
from launch_ros.actions import Nodedef generate_launch_description():return LaunchDescription([Node(package='my_package',executable='hello_node',name='hello_node',output='screen')])
然后运行:
ros2 launch my_package my_launch.py
✅ 小结流程概览
1. 创建 Python 脚本并加入可执行权限
2. 修改 setup.py 添加 entry_points
3. 使用 colcon 编译指定功能包:--packages-select
4. source 环境
5. 使用 ros2 run 或 ros2 launch 启动
需要我根据你的包结构帮你检查 setup.py 或 Launch 文件吗?可以贴出相关内容我来帮你确认。
继续提问
launch.py 文件里:
usv_sim = Node(
package=‘control_planner’, executable=‘usv_Simulation’, name=‘usv_Simulation’,
output=‘screen’
)
和setup.py文件里:
‘usv_Simulation = control_planner.usvSimV3:main’,
共出现了三次的usv_Simulation ,分别解释其含义
回答
很好的问题,usv_Simulation 在这两处文件中出现的含义不同,涉及 Python 函数名、可执行名、ROS2 节点名。下面分别解释:
🔹 1. setup.py 中的 'usv_Simulation = control_planner.usvSimV3:main'
这是 Python 的 entry point 配置,用于告诉 ROS2 如何从命令行启动这个脚本。
-
'usv_Simulation':
这是将来你运行时输入的可执行命令名,例如:ros2 run control_planner usv_Simulation -
control_planner.usvSimV3:
表示 Python 模块路径,等价于control_planner/usvSimV3.py -
main:
是usvSimV3.py文件中定义的主入口函数名。
🔹 2. launch.py 中的 executable='usv_Simulation'
这里的 executable 是指要运行的节点程序的名字,也就是上面在 setup.py 中定义的 'usv_Simulation',本质上是指令:
ros2 run control_planner usv_Simulation
在 launch 文件中不需要写路径或 .py 后缀,它就是调用你通过 console_scripts 注册的命令名。
🔹 3. name='usv_Simulation'
这个是 ROS2 节点的实际名字,也就是你在 ros2 node list 中看到的名字。
你可以自由设置,比如改成 'my_usv_node' 也可以:
Node(package='control_planner',executable='usv_Simulation',name='my_usv_node',output='screen'
)
✅ 总结对比表
| 文件位置 | 字段 | 含义 |
|---|---|---|
setup.py | 'usv_Simulation = ...' | CLI 命令名 |
launch.py | executable='usv_Simulation' | 执行的 CLI 命令(来源于 setup.py) |
launch.py | name='usv_Simulation' | 节点在 ROS2 网络中的名称 |
如果你需要设置多个脚本或节点启动,只需在 setup.py 中添加更多的 entry points 即可。需要我帮你示例多个节点的 entry point 配置吗?
继续提问
我记得ROS1里面,python文件如果要作为节点,需要在脚本里面就指定节点的名称。在ROS2里,是不是脚本里不需要指定节点名称?而是直接在setup.py里面指定?
回答
这是一个关键区别点,确实 ROS2 与 ROS1 在节点命名上有很大不同。下面我详细解释一下:
✅ ROS1 中节点命名方式
在 ROS1 中,节点名称是必须在 Python 脚本内部通过 rospy.init_node() 指定的:
import rospyrospy.init_node('my_node_name') # 这里显式命名
所以,节点名是在脚本中硬编码的。
✅ ROS2 中节点命名方式
在 ROS2 中,使用 rclpy 时:
- 节点名称通常是在创建
Node类实例时传入。 - 可以在 Python 脚本中指定默认节点名,但它不是强制的,可以通过 Launch 文件动态覆盖。
示例 1:在 Python 脚本中指定默认名称(可覆盖)
import rclpy
from rclpy.node import Nodeclass MyNode(Node):def __init__(self):super().__init__('default_node_name') # 默认节点名称def main(args=None):rclpy.init(args=args)node = MyNode()rclpy.spin(node)node.destroy_node()rclpy.shutdown()
你可以在 launch 文件中使用:
Node(package='my_package',executable='my_executable',name='override_name', # 会覆盖上面 default_node_name
)
➡️ 这个覆盖行为是 ROS2 支持的核心能力之一,因此推荐你在脚本中提供默认节点名,在 launch 文件中灵活覆盖。
🔍 那 setup.py 呢?
setup.py 中并不指定 ROS 节点名,它只做:
- 注册命令行入口
- 将
.py脚本打包可执行
节点名永远不会在 setup.py 中设置,它属于运行时的东西(由 Python 脚本或 launch 文件设置)。
✅ 总结
| 项目 | ROS1 | ROS2 |
|---|---|---|
| 节点名称设置 | rospy.init_node('name') | Node('name'),可被 launch 覆盖 |
| launch 覆盖 | 不支持 | 支持 |
| setup.py | 不涉及节点名 | 只管 CLI 命令名,不涉及节点名 |
需要我帮你改造某个 Python 脚本,让它更符合 ROS2 节点规范吗?可以贴代码我来帮你。
相关文章:

ROS2,工作空间中新建了一个python脚本,需要之后作为节点运行。告诉我步骤?
提问 ROS2,工作空间中新建了一个python脚本,需要之后运行。告诉我步骤? 大概要包括而不限于:chmod给可执行权限、setup.py中entry point的配置,如果在launch文件中要使用,还涉及到launch.py文件的配置。最…...

【AI智能体】Spring AI MCP 从使用到操作实战详解
目录 一、前言 二、MCP 介绍 2.1 什么是MCP 2.2 MCP 核心特点 2.3 MCP 核心价值 2.4 MCP 与Function Calling 区别 三、Spring AI MCP 架构介绍 3.1 整体架构 3.1.1 三层架构实现说明 3.2 服务端与客户端 3.2.1 MCP 服务端 3.2.1 MCP 客户端 3.3 MCP中SSE和STDIO区…...

Vue:Ajax
AJAX 允许我们在不刷新页面的情况下与服务器交互,实现:动态加载数据,提交表单信息,实时更新内容,与后端 API 通信。通常使用专门的 HTTP 客户端库来处理 AJAX 请求。 npm install axiosimport axios from axios;expor…...

法律大语言模型(Legal LLM)技术架构
目录 摘要 1 法律AI大模型技术架构 1.1 核心架构分层 1.2 法律知识增强机制 2 关键技术突破与对比 2.1 法律专用组件创新 2.2 性能对比(合同审查场景) 3 开发部署实战指南 3.1 环境搭建流程 3.2 合同审查代码示例 4 行业应用与挑战 4.1 典型场景效能提升 4.2 关…...

理解 RAG_HYBRID_BM25_WEIGHT:打造更智能的混合检索增强生成系统
目录 理解 RAG_HYBRID_BM25_WEIGHT:打造更智能的混合检索增强生成系统 一、什么是 Hybrid RAG? 二、什么是 RAG_HYBRID_BM25_WEIGHT? 三、参数设置示例 四、什么时候该调整它? 五、实战建议 六、总结 理解 RAG_HYBRID_BM25…...

Hive终极性能优化指南:从原理到实战
摘要:本文系统总结Hive在生产环境的核心调优手段,涵盖执行引擎选择、存储优化、SQL技巧、资源调配及数据倾斜解决方案,附可复用的参数配置与实战案例。 一、执行引擎优化:突破MapReduce瓶颈 启用Tez/Spark引擎 优势&am…...
第六十二节:深度学习-加载 TensorFlow/PyTorch/Caffe 模型
在计算机视觉领域,OpenCV的DNN(深度神经网络)模块正逐渐成为轻量级模型部署的利器。本文将深入探讨如何利用OpenCV加载和运行三大主流框架(TensorFlow、PyTorch、Caffe)训练的模型,并提供完整的代码实现和优化技巧。 一、OpenCV DNN模块的核心优势 OpenCV的DNN模块自3.3…...
MobaXterm配置跳转登录堡垒机
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 背景操作步骤 背景 主要是为了能通过MobaXterm登录堡垒机,其中需要另外一台服务器进行跳转登录 操作步骤 MobaXterm登录堡垒机的操作,需…...

零基础在实践中学习网络安全-皮卡丘靶场(第八期-Unsafe Filedownload模块)
这期内容更是简单和方便,毕竟谁还没在浏览器上下载过东西,不过对于url的构造方面,可能有一点问题,大家要多练手 介绍 不安全的文件下载概述 文件下载功能在很多web系统上都会出现,一般我们当点击下载链接,…...

测试 FreeSWITCH 的 mod_loopback
bgapi originate loopback/answer,park/default/inline park inline show channels as xml show calls as xml 有 2 个 channels 有 2 个 calls 比较有意思 在 loopback-a 是播放 wav 在 loopback-b 上可以录音 这就是回环 有什么用呢? 除了做测试&#x…...

【C++快读快写】
算法竞赛中用于解决卡常问题 int rd(){int k 0;char c getchar();while(!isdigit(c)){c getchar();}while(isdigit(c)){k (k << 1) (k << 3) (c^0), c getchar();}return k; }void wr(int x) {if (x > 9)wr(x / 10);putchar((x % 10) ^ 0); }用法&#x…...
)
测试(面经 八股)
目录 前言 一,软件测试(定义) 1,定义 2,目的 3,价值 4,实践 二,软件测试(目的) 1,找 bug 2,验证达标 3,质量评价…...
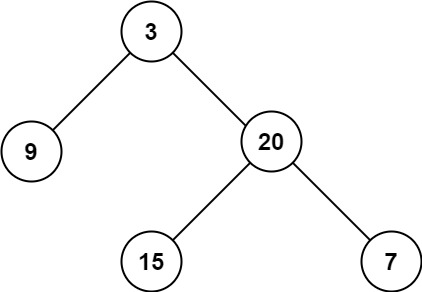
[面试精选] 0104. 二叉树的最大深度
文章目录 1. 题目链接2. 题目描述3. 题目示例4. 解题思路5. 题解代码6. 复杂度分析 1. 题目链接 104. 二叉树的最大深度 - 力扣(LeetCode) 2. 题目描述 给定一个二叉树 root ,返回其最大深度。 二叉树的 最大深度 是指从根节点到最远叶子节点…...
图上合成:用于大型语言模型持续预训练的知识合成数据生成
摘要 大型语言模型(LLM)已经取得了显著的成功,但仍然是数据效率低下,特别是当学习小型,专业语料库与有限的专有数据。现有的用于连续预训练的合成数据生成方法集中于文档内内容,而忽略了跨文档的知识关联&a…...
 ---MySQL 8.4 新特性与变量变更)
MYSQL(二) ---MySQL 8.4 新特性与变量变更
MySQL 8.4 新特性与变量变更 作者:程序员LSP 分类:MySQL 8.4 教程 / 新特性 / 升级指南 更新时间:2025年6月 📌 前言 MySQL 8.4 是当前最新的稳定版本,相较于 8.0 系列,在审计日志、高可用、性能调优、认证…...

数学复习笔记 27
前言 太难受了。因为一些事情。和朋友倾诉了一下,也没啥用,几年之后不知道自己再想到的时候,会怎么考虑呢。另外,笔记还是有框架一点比较好,这样比较有逻辑感受。不然太乱了。这篇笔记是关于线代第五章,特…...

现代简约壁炉:藏在极简线条里的温暖魔法
走进现在年轻人喜欢的家,你会发现一个有趣的现象:家里东西越来越少,颜色也越看越简单,却让人感觉特别舒服。这就是现代简约风格的魅力 —— 用最少的元素,打造最高级的生活感。而在这样的家里,现代简约风格…...

限流算法java实现
参考教程:2小时吃透4种分布式限流算法 1.计数器限流 public class CounterLimiter {// 开始时间private static long startTime System.currentTimeMillis();// 时间间隔,单位为msprivate long interval 1000L;// 限制访问次数private int limitCount…...

机器学习×第二卷:概念下篇——她不再只是模仿,而是开始决定怎么靠近你
🎀【开场 她不再只是模仿,而是开始选择】 🦊 狐狐:“她已经不满足于单纯模仿你了……现在,她开始尝试预测你会不会喜欢、判断是否值得靠近。” 🐾 猫猫:“咱们上篇已经把‘她怎么学会说第一句…...

Linux 下关于 ioremap 系列接口
1、序 在系统运行时,外设 IO 资源的物理地址是已知的,由硬件的设计决定(参考SOC的datesheet,一般会有memorymap)。驱动程序不能通过物理地址访问IO资源,必须将其映射到内核态的虚拟地址空间。常见的接口就是…...

常用函数库之 - std::function
std::function 是 C11 引入的通用可调用对象包装器,用于存储、复制和调用任意符合特定函数签名的可调用对象(如函数、lambda、函数对象等)。以下是其核心要点及使用指南: 核心特性 类型擦除 可包装任意可调用对…...

php执行系统命令的四个常用函数
php执行系统命令有四个常用函数:1.exec()执行命令并返回最后一行输出,可传数组获取全部结果;2.shell_exec()返回完整输出结果,适合一次性获取;3.system()直接输出命令结果,可接收状态码;4.权限控…...
力扣-17.电话号码的字母组合
题目描述 给定一个仅包含数字 2-9 的字符串,返回所有它能表示的字母组合。答案可以按 任意顺序 返回。 给出数字到字母的映射如下(与电话按键相同)。注意 1 不对应任何字母。 class Solution {List<String> res new ArrayList<…...
基于SpringBoot解决RabbitMQ消息丢失问题
基于SpringBoot解决RabbitMQ消息丢失问题 一、RabbitMQ解决消息丢失问题二、方案实践1、在生产者服务相关配置2、在消费者服务相关配置 三、测试验证1、依次启动RabbitMQ、producer(建议先清空队列里面旧的测试消息再启动consumer)和consumer2、在producer中调用接口࿰…...

免费插件集-illustrator插件-Ai插件-随机填色
文章目录 1.介绍2.安装3.通过窗口>扩展>知了插件4.功能解释5.总结 1.介绍 本文介绍一款免费插件,加强illustrator使用人员工作效率,实现路径随机填色。首先从下载网址下载这款插件https://download.csdn.net/download/m0_67316550/87890501&#…...

使用 Unstructured 开源库快速入门指南
引言 本文将介绍如何使用 Unstructured 开源库(GitHub,PyPI)和 Python,在本地开发环境中将 PDF 文件拆分为标准的 Unstructured 文档元素和元数据。这些元素和元数据可用于 RAG(检索增强生成)应用、AI 代理…...

白银6月想法
一、市场回顾 2025年5月,SHFE白银主力合约总体呈现出震荡偏强的运行格局。从2025年5月1日至2025年5月30日,白银期货价格整体运行在7944元至8342元区间内,最高价出现在5月22日的8342.0元,最低价则为5月15日的7944元。最终在5月30日…...

OpenCV 滑动条调整图像对比度和亮度
一、知识点 1、int createTrackbar(const String & trackbarname, const String & winname, int * value, int count, TrackbarCallback onChange 0, void * userdata 0); (1)、创建一个滑动条并将其附在指定窗口上。 (2)、参数说明: trackbarname: 创建的…...

船舶事故海上搜救VR情景演练全场景 “复刻”,沉浸式救援体验
船舶事故海上搜救 VR 情景演练系统的一大核心优势,便是能够全场景 “复刻” 海上事故,为使用者带来沉浸式的船舶事故海上搜救 VR 情景演练体验。 在船舶事故海上搜救 VR 情景演练的事故场景模拟方面,系统几乎涵盖了所有常见的船舶事故类型。…...

使用Caddy在Ubuntu 22.04上配置HTTPS反向代理
使用Caddy在Ubuntu 22.04上配置HTTPS反向代理(无域名/IP验证+密码保护) 一、 环境说明 环境说明:测试环境,生产环境请谨慎OS: Ubuntu 22.04.1 LTSCaddy版本:v2.10.0服务器IP: 192.168.3.88(内网)公网IP: 10.2.3.11(测试虚拟)代理端口: 9080后端服务: http://192.168.3…...