在RK3588上搭建ROS1环境:创建节点与数据可视化实战指南
在RK3588上搭建ROS1环境:创建节点与数据可视化实战指南
- 背景介绍
- 完整操作步骤
- 1. 创建Docker容器环境
- 2. 验证GUI显示功能
- 3. 安装ROS Noetic
- 4. 配置环境变量
- 5. 创建ROS节点(小球运动模拟)
- 6. 配置RVIZ默认视图
- 7. 创建启动脚本
- 8. 运行可视化系统
- 效果展示与交互
- 技术解析
- ROS节点通信架构
- 运动模型原理
- 性能优化技巧
- 应用场景扩展
- 总结
背景介绍
机器人操作系统(ROS)是机器人开发领域的核心框架,它提供了一系列工具和库来简化复杂机器人系统的构建。在嵌入式平台如RK3588上运行ROS具有重要实际意义,因为它能让我们在资源受限的设备上实现复杂的机器人功能。
本文将详细介绍如何在RK3588开发板上:
- 使用Docker容器化环境安装ROS1(Noetic)
- 创建模拟场景节点(小球绕圆柱运动)
- 实现多模态数据可视化(点云、标记、图像)
- 使用RVIZ进行实时数据展示
这种容器化ROS开发方法不仅适用于RK3588,也可用于其他嵌入式平台,为机器人开发提供了可靠的环境隔离和部署便利性。
完整操作步骤
1. 创建Docker容器环境
在嵌入式开发中使用Docker容器有三大优势:
- 环境隔离:避免污染主机系统
- 可移植性:环境可轻松迁移到其他设备
- 依赖管理:简化复杂依赖的安装过程
创建启动脚本:
cat> run_ros.sh <<-'EOF'
#!/bin/bash
image_name="ubuntu:20.04"
echo $image_name
container_name="ros_rk3588"
if [ $(docker ps -a -q -f name=^/${container_name}$) ]; thenecho "容器 '$container_name' 已经存在。"
elseecho "容器 '$container_name' 不存在。正在创建..."docker run -id --privileged --net=host \-v /etc/localtime:/etc/localtime:ro \-v $PWD:/home -e DISPLAY=$DISPLAY -w /home \-v /tmp/.X11-unix:/tmp/.X11-unix \-e GDK_SCALE -e GDK_DPI_SCALE \--name $container_name --hostname=$container_name $image_name /bin/bash
fi
docker start $container_name
docker exec -ti $container_name bash
EOF
2. 验证GUI显示功能
bash run_ros.sh # 进入容器
apt update
apt install x11-apps -y # 安装基础图形工具
xclock # 测试GUI显示
成功运行xclock并看到时钟界面,说明Docker的GUI转发配置正确。
3. 安装ROS Noetic
ROS Noetic是最后一个支持Python2的ROS1版本,兼容性好:
# 添加ROS软件源
apt install lsb-core -y
sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'# 安装必要工具
apt install curl vim -y# 添加ROS密钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | apt-key add -# 安装ROS完整桌面版
apt update -y
apt install ros-noetic-desktop-full -y# 安装开发工具
apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential -y# 安装Python依赖
apt install python3.8 pip -y
pip3 install opencv-python==4.11.0.86 -i https://mirrors.aliyun.com/pypi/simple/# 初始化ROS依赖系统
rosdep init
rosdep update
4. 配置环境变量
确保每次启动时自动加载ROS环境:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
echo "127.0.0.1 ros_rk3588" >> /etc/hosts
5. 创建ROS节点(小球运动模拟)
cat > v2x_node_top_view.py <<-'EOF'
import rospy
import numpy as np
from sensor_msgs.msg import PointCloud2, Image as ImageRos
from visualization_msgs.msg import Marker, MarkerArray
from cv_bridge import CvBridge
import math
import cv2
from sensor_msgs.msg import Image,PointCloud2,Imu
from std_msgs.msg import Header
import sensor_msgs.point_cloud2 as pcl2# 生成圆柱点云
def generate_cylinder(center_x, center_y, radius, height, num_points=500):points = []for _ in range(num_points):# 随机角度和高度theta = np.random.uniform(0, 2*np.pi)h = np.random.uniform(0, height)# 计算点坐标x = center_x + radius * np.cos(theta)y = center_y + radius * np.sin(theta)z = h# 添加到点云 (x,y,z + 强度)points.append([x, y, z, 0.0])return np.array(points, dtype=np.float32)# 创建可视化Marker
def create_cylinder_marker(center_x, center_y, height, radius, id_num, frame_id="map"):marker = Marker()marker.header.frame_id = frame_idmarker.header.stamp = rospy.Time.now()marker.ns = "cylinders"marker.id = id_nummarker.type = Marker.CYLINDERmarker.action = Marker.ADD# 位置和尺寸marker.pose.position.x = center_xmarker.pose.position.y = center_ymarker.pose.position.z = height/2 # 中心位于半高marker.pose.orientation.w = 1.0marker.scale.x = radius * 2marker.scale.y = radius * 2marker.scale.z = height# 颜色 (RGBA)marker.color.r = 0.0marker.color.g = 1.0marker.color.b = 0.0marker.color.a = 0.5 # 半透明marker.lifetime = rospy.Duration()return markerdef create_ball_marker(x, y, z, id_num, frame_id="map"):marker = Marker()marker.header.frame_id = frame_idmarker.header.stamp = rospy.Time.now()marker.ns = "ball"marker.id = id_nummarker.type = Marker.SPHEREmarker.action = Marker相关文章:

在RK3588上搭建ROS1环境:创建节点与数据可视化实战指南
在RK3588上搭建ROS1环境:创建节点与数据可视化实战指南 背景介绍完整操作步骤1. 创建Docker容器环境2. 验证GUI显示功能3. 安装ROS Noetic4. 配置环境变量5. 创建ROS节点(小球运动模拟)6. 配置RVIZ默认视图7. 创建启动脚本8. 运行可视化系统效果展示与交互技术解析ROS节点通…...

密码学基础——SM4算法
博客主页:christine-rr-CSDN博客 专栏主页:密码学 📌 【今日更新】📌 对称密码算法——SM4 目录 一、国密SM系列算法概述 二、SM4算法 2.1算法背景 2.2算法特点 2.3 基本部件 2.3.1 S盒 2.3.2 非线性变换 编辑…...
aardio 自动识别验证码输入
技术尝试 上周在发学习日志时有网友提议“在网页上识别验证码”,于是尝试整合图像识别与网页自动化技术,完成了这套模拟登录流程。核心思路是:截图验证码→OCR识别→自动填充表单→提交并验证结果。 代码在这里 import soImage; import we…...

车载诊断架构 --- ZEVonUDS(J1979-3)简介第一篇
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是…...

机器学习的数学基础:线性模型
线性模型 线性模型的基本形式为: f ( x ) ω T x b f\left(\boldsymbol{x}\right)\boldsymbol{\omega}^\text{T}\boldsymbol{x}b f(x)ωTxb 回归问题 利用最小二乘法,得到 ω \boldsymbol{\omega} ω和 b b b的参数估计$ \boldsymbol{\hat{\omega}}…...

多元隐函数 偏导公式
我们来推导隐函数 z z ( x , y ) z z(x, y) zz(x,y) 的偏导公式,给定一个隐函数关系: F ( x , y , z ( x , y ) ) 0 F(x, y, z(x, y)) 0 F(x,y,z(x,y))0 🧠 目标: 求 ∂ z ∂ x \frac{\partial z}{\partial x} ∂x∂z、 …...
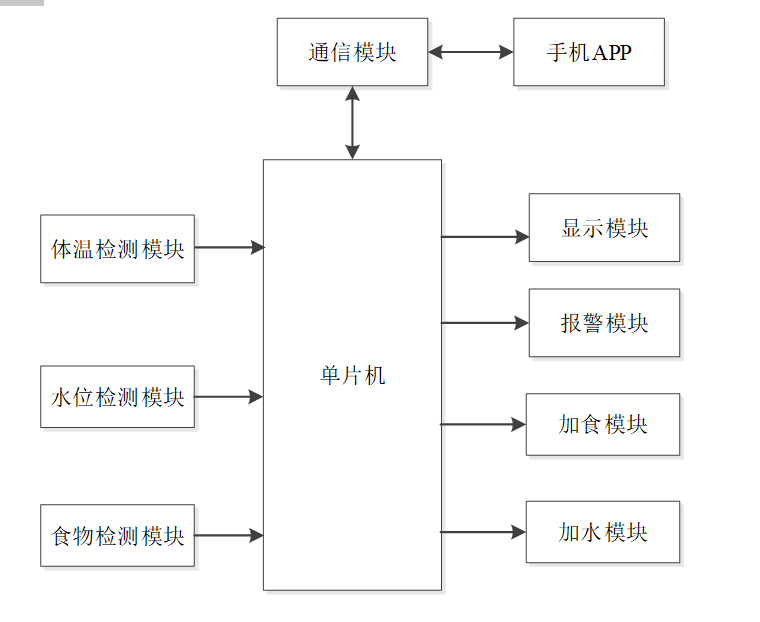
基于单片机的宠物屋智能系统设计与实现(论文+源码)
本设计基于单片机的宠物屋智能系统核心是实现对宠物生活环境及状态的智能管理。系统以单片机为中枢,连接红外测温传感器,可实时精准捕捉宠物体温变化,以便及时发现健康异常;水位检测传感器时刻监测饮用水余量,防止宠物…...
Vue3 PC端 UI组件库我更推荐Naive UI
一、Vue3生态现状与UI库选择的重要性 随着Vue3的稳定发布和Composition API的广泛采用,前端开发者面临着UI组件库的重新选择。一个好的UI库不仅能提升开发效率,还能确保项目的长期可维护性。本文将对比三大主流Vue3 UI库(Naive UI、Element …...

前端调试HTTP状态码
1xx(信息类状态码) 这类状态码表示临时响应,需要客户端继续处理请求。 100 Continue 服务器已收到请求的初始部分,客户端应继续发送剩余部分。 2xx(成功类状态码) 表示请求已成功被服务器接收、理解并处…...

《Offer来了:Java面试核心知识点精讲》大纲
文章目录 一、《Offer来了:Java面试核心知识点精讲》的典型大纲框架Java基础并发编程JVM原理数据库与缓存分布式架构系统设计二、《Offer来了:Java面试核心知识点精讲(原理篇)》技术文章大纲核心主题:Java基础原理与面试高频考点Java虚拟机(JVM)原理Java并发编程原理Jav…...

[特殊字符] 手撸 Redis 互斥锁那些坑
📖 手撸 Redis 互斥锁那些坑 最近搞业务遇到高并发下同一个 key 的互斥操作,想实现分布式环境下的互斥锁。于是私下顺手手撸了个基于 Redis 的简单互斥锁,也顺便跟 Redisson 的 RLock 机制对比了下,记录一波,别踩我踩过…...

大数据治理的常见方式
大数据治理的常见方式 大数据治理是确保数据质量、安全性和可用性的系统性方法,以下是几种常见的治理方式: 1. 数据质量管理 核心方法: 数据校验:建立数据校验规则(格式、范围、一致性等)数据清洗&…...

用递归算法解锁「子集」问题 —— LeetCode 78题解析
文章目录 一、题目介绍二、递归思路详解:从决策树开始理解三、解法一:二叉决策树 DFS四、解法二:组合式回溯写法(推荐)五、解法对比 递归算法是编程中一种非常强大且常见的思想,它能够优雅地解决很多复杂的…...

flow_controllers
关键点: 流控制器类型: 同步(Sync):发布操作会阻塞,直到数据被确认发送。异步(Async):发布操作非阻塞,数据发送由后台线程处理。纯同步(PureSync…...
之(六) ——通用对象池总结(核心))
怎么开发一个网络协议模块(C语言框架)之(六) ——通用对象池总结(核心)
+---------------------------+ | operEntryTbl[] | ← 操作对象池 (对象数组) +---------------------------+ | 0 | 1 | 2 | ... | N-1 | +---------------------------+↓ 初始化时全部加入 +------------------------+ +-------------------------+ | …...

TJCTF 2025
还以为是天津的。这个比较容易,虽然绕了点弯,可还是把CP AK了,不过我会的别人也会,还是没啥名次。记录一下吧。 Crypto bacon-bits with open(flag.txt) as f: flag f.read().strip() with open(text.txt) as t: text t.read…...
C# winform教程(二)----checkbox
一、作用 提供一个用户选择或者不选的状态,这是一个可以多选的控件。 二、属性 其实功能大差不差,除了特殊的几个外,与button基本相同,所有说几个独有的 checkbox属性 名称内容含义appearance控件外观可以变成按钮形状checkali…...
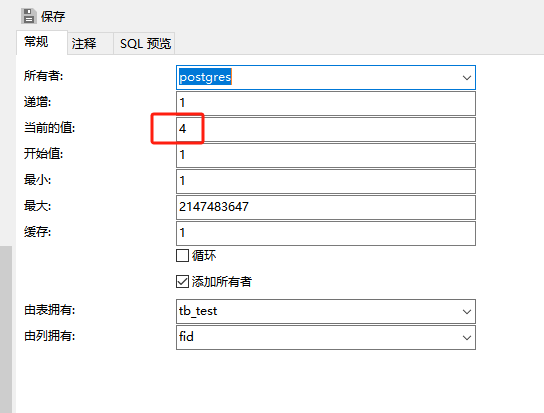
pgsql:还原数据库后出现重复序列导致“more than one owned sequence found“报错问题的解决
问题: pgsql数据库通过备份数据库文件进行还原时,如果表中有自增序列,还原后可能会出现重复的序列,此时若向表中插入新行时会出现“more than one owned sequence found”的报错提示。 点击菜单“其它”-》“序列”,…...

【实施指南】Android客户端HTTPS双向认证实施指南
🔐 一、所需准备材料 证书文件(6类核心文件) 类型 格式 作用 Android端要求 CA根证书 .crt/.pem 验证服务器/客户端证书合法性 需预置到Android信任库 服务器证书 .crt 服务器身份证明 客户端需持有以验证服务器 客户端证书 .crt 客户端身份…...
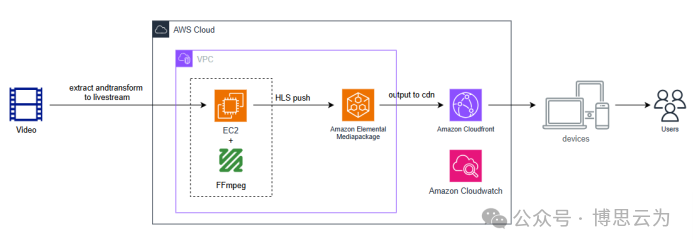
客户案例 | 短视频点播企业海外视频加速与成本优化:MediaPackage+Cloudfront 技术重构实践
01技术背景与业务挑战 某短视频点播企业深耕国内用户市场,但其后台应用系统部署于东南亚印尼 IDC 机房。 随着业务规模扩大,传统架构已较难满足当前企业发展的需求,企业面临着三重挑战: ① 业务:国内用户访问海外服…...
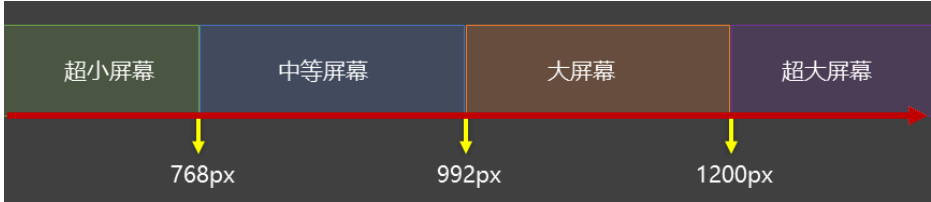
CSS3相关知识点
CSS3相关知识点 CSS3私有前缀私有前缀私有前缀存在的意义常见浏览器的私有前缀 CSS3基本语法CSS3 新增长度单位CSS3 新增颜色设置方式CSS3 新增选择器CSS3 新增盒模型相关属性box-sizing 怪异盒模型resize调整盒子大小box-shadow 盒子阴影opacity 不透明度 CSS3 新增背景属性ba…...
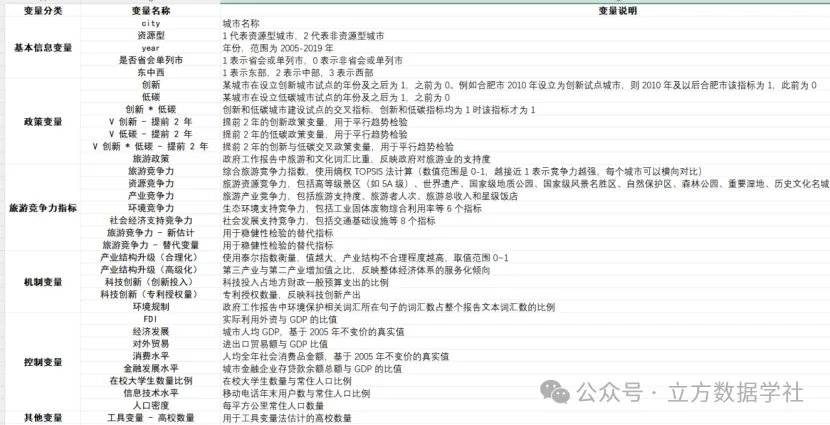
【免费数据】2005-2019年我国272个地级市的旅游竞争力多指标数据(33个指标)
旅游业是一个城市的重要产业构成。旅游竞争力是一个城市竞争力的重要构成部分。一个城市的旅游竞争力反映了其在旅游市场竞争中的比较优势。 今日我们分享的是2005-2019年我国272个地级市的旅游竞争力多指标数据!该数据集源自2025年4月发表于《地理学报》的论文成果…...
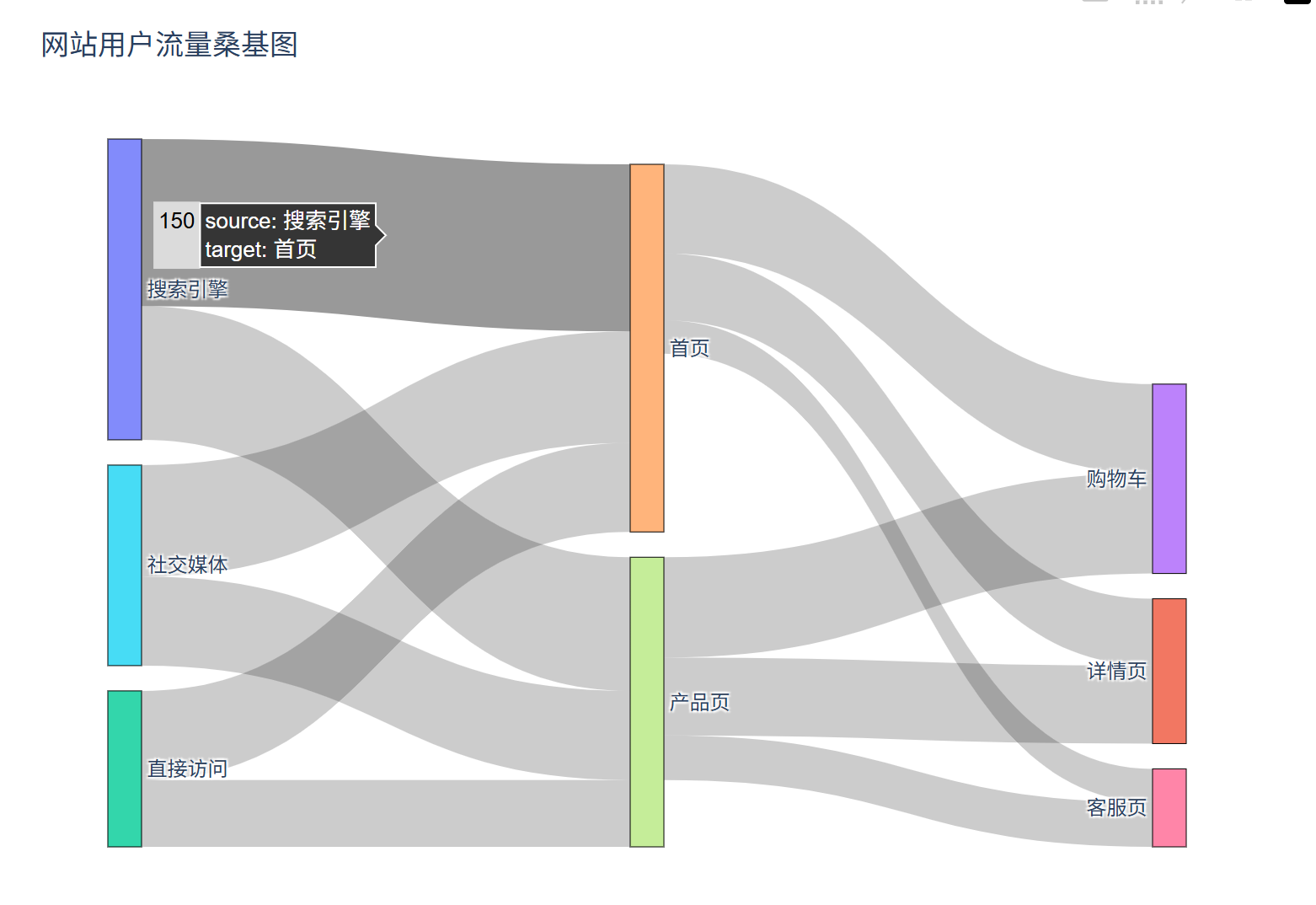
相关类相关的可视化图像总结
目录 一、散点图 二、气泡图 三、相关图 四、热力图 五、二维密度图 六、多模态二维密度图 七、雷达图 八、桑基图 九、总结 一、散点图 特点 通过点的位置展示两个连续变量之间的关系,可直观判断线性相关、非线性相关或无相关关系,点的分布密…...
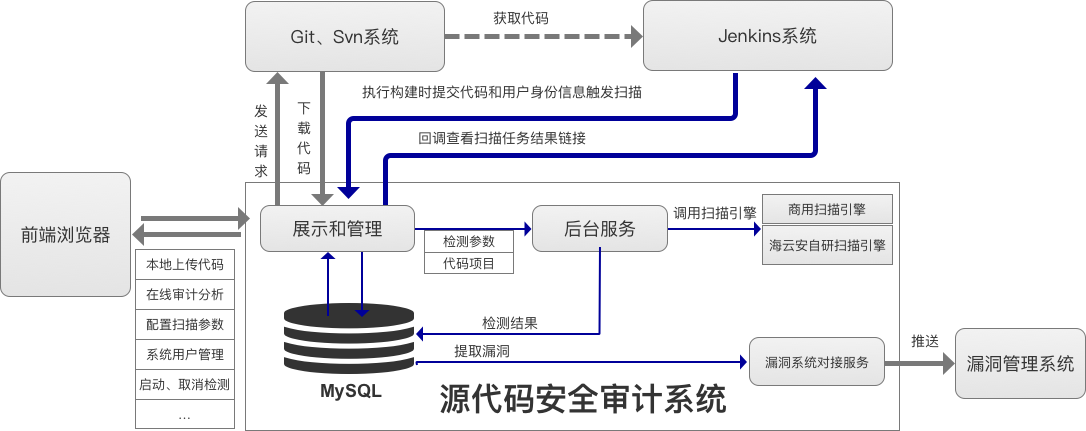
海云安高敏捷信创白盒SCAP入选《中国网络安全细分领域产品名录》
近日,嘶吼安全产业研究院发布《中国网络安全细分领域产品名录》,海云安高敏捷信创白盒(SCAP)成功入选软件供应链安全领域产品名录。 在数字化转型加速的今天,网络安全已成为企业生存与发展的核心基石,为了解…...

解析“道作为序位生成器”的核心原理
解析“道作为序位生成器”的核心原理 以下完整展开道函数的零点调控机制,重点解析"道作为序位生成器"的核心原理与实现框架: 一、道函数的零点调控机制 1. 道作为序位生成器 道在认知坐标系$(x_{\text{物}}, y_{\text{意}}, z_{\text{文}}…...

基于开源AI智能名片链动2 + 1模式S2B2C商城小程序的沉浸式体验营销研究
摘要:在消费市场竞争日益激烈的当下,传统体验营销方式存在诸多局限。本文聚焦开源AI智能名片链动2 1模式S2B2C商城小程序,探讨其在沉浸式体验营销中的应用。通过对比传统品鉴、工厂参观等初级体验方式,分析沉浸式体验的优势与价值…...

对象回调初步研究
_OBJECT_TYPE结构分析 在介绍什么是对象回调前,首先要熟悉下结构 以我们上篇线程回调介绍过的导出的PsProcessType 结构为例,用_OBJECT_TYPE这个结构来解析它,0x80处就是今天要介绍的回调链表,但是先不着急,先把目光…...

TCP/IP 网络编程 | 服务端 客户端的封装
设计模式 文章目录 设计模式一、socket.h 接口(interface)二、socket.cpp 实现(implementation)三、server.cpp 使用封装(main 函数)四、client.cpp 使用封装(main 函数)五、退出方法…...

数据库——redis
一、Redis 介绍 1. 概述 Redis(Remote Dictionary Server)是一个开源的、高性能的内存键值数据库系统,具有以下核心特点: 内存存储架构:数据主要存储在内存中,提供微秒级的读写响应 多数据结构支持&…...

Java后端检查空条件查询
通过抛出运行异常:throw new RuntimeException("请输入查询条件!");BranchWarehouseServiceImpl.java // 查询试剂交易(入库/出库)记录Overridepublic List<BranchWarehouseTransactions> queryForReagent(Branch…...