ORB特征笔记
简介
ORB = Oriented FAST + Rotated BRIEF
前面的Oriented FAST说明的是它的关键点的选取是一种改良过的FAST,在FAST的基础上加了方向信息;后面的Rotated BRIEF是指特征描述符使用BRIEF描述子(Binary Robust Independent Elementary Feature),是一种速度极快的二进制描述子。
改良的FAST角点检测
在前面笔记中已经记录了FAST角点检测的基本原理。oFAST主要改良的点是增加了关键点的方向描述,还有就是增加了图像金字塔。
1. 构造高斯金字塔
ORB中的图像金字塔和SIFT中的多尺度高斯金字塔不同,每层只有一副图。金字塔共有n层,第s层的尺度为:。
是初始尺度,默认值1.2。原图在第0层。第s层的图片尺寸为:
。

2. 特征点检测
在不同尺度的图像上使用FAST算法检测特征点 。FAST在边缘上有较大的响应,ORB中利用了Harris角点响应度量来排序FAST的关键点。对于目标为N个关键点的情况,首先将阈值设置得足够低以获取比N多的关键点,然后根据Harris角点响应值排序,选取前N个关键点。
3. 计算特征点主方向
使用灰度质心法计算出以特征点中心O为圆心,半径为r的圆形区域内的质心点C。 特征点的主方向是从O到C的向量的方向。
灰度质心的位置点C为:
其中,的计算方法为:
因此:
特征点的主方向角度为:
构建rBRIEF描述符
经过oFAST得到了关键点和其主方向后,接下来就要构建出关键点的特征描述符了。ORB有旋转不变性,在构建BRIEF描述符之前,会将特征点的邻域旋转到特征点的主方向上。
BRIEF特征描述符
BRIEF的核心思想是在关键点P的周围选取N个点对,然后把这N个点对的边角结果组合起来作为该关键点的描述子。Brief算法生成的是一种二值化的描述子,匹配的时候只需要使用简单的汉明距离比对即可,使用bits之间的异或操作就能完成。因此它的时间空间代价都比较低,效果也还不错。
1. 滤波:对原图滤波,去除部分噪声。
2. 选取点对:以关键点为中心,选取一定大小的图像窗口p,在窗口内选择一对点,比较两者像素值的大小,进行赋值,二值测试函数定义如下:
其中,表示像素x在窗口p内的像素值。
3. 在窗口p中随机选取N(128,256,512,默认为256) 对随机点对,重复第2步进行二进制赋值,最后得到一个N维的二进制描述子,这个结果向量被定义为:
这个式子其实直白理解就是,每一个bit表示了一个点对的对比结果。
Brief算法中点对的选取方法
对于SxS的区域内选取点对,原始Brief论文中做了5种方法:
1.(X,Y) ~ i.i.d(独立同分布)。服从均匀分布:
位置均匀分布在块内。
2. (X,Y) ~ i.i.d(独立同分布)。服从高斯分布:采样带内服从各向同性的高斯分布。
3. X ~ i.i.d(独立同分布),服从高斯分布;Y~ i.i.d(独立同分布),服从高斯分布
。 采样分两步,第一步以原点为中心的高斯分布中采样出
,然后再以
为中心,采样得到第二个位置。超出块的范围的位置会被钳在块的边缘处。
4. 在空间量化极坐标下的离散位置随机采样;
5. 。
固定为原点,
采样自粗粒度的极坐标网格的离散位置上。
上述5种采样方式的示意图如下:

在旋转不是非常厉害的图像里,用BRIEF生成的描述子的匹配质量非常高。
Steered BRIEF
原始的BRIEF算法,不具有旋转不变性,当平面发生非常小角度的旋转后,其匹配质量会大幅下降。下图是各种描述子在平面旋转角度和算法对应的正常有效点(inliers)的百分比示意图:

Steered BRIEF会根据关键点的方向进行旋转,然后再计算Biref描述符。对于特征点邻域内的n个点对的集合:
通过一个旋转角度为对应的旋转矩阵
做变换,定义出旋转后的点对集合
:
因此steered BRIEF算子变成了:
这个函数定义实际就是对旋转后的点对儿进行对比生成Biref描述符的计算过程。
rBRIEF
steered BRIEF解决了BRIEF不具有旋转不变性的问题,但它在描述符的可区分性上。描述符本身是关键点的特征信息,在匹配的时候可以用来区分不同的关键点。如果描述符的可区分性变差,则不同的关键点相似度会变高,不容易找到对应的关键点,误匹配率会变大。论文中对100K个采样的关键点用不同的方法生成的特征描述符的均值分布:

图中X轴表示到均值0.5的距离。y轴则是对应BRIEF描述符中的特征bits数量。
注:网上参考的所有文章几乎都是说y轴是特征点数量,这点我持保留意见,虽然最终要表达的意思是差不多的。论文中描述这个图表的原话是:
“the spread of means for a typical Gaussian BRIEF pattern of 256 bits over 100k sample keypoints”。
个人感觉应该是根据100K个采样点统计后按照概率所计算的描述符中某个bit feature列计算均值,然后按照这个均值到0.5的距离进行分段统计。假设距离为0的有140个,表示的是这256个列中,有140 bit feature列的均值就是0.5。如下图所示:

以上仅为个人理解,大家可以去看看原始论文,或者去参看一下“参考资料”中最后一个链接。
为什么X轴要用到均值0.5的距离?因为我们得到的描述符都是二值的(0,1),对于多个0和1组成的串。如果计算出的均值是0.5,则表示这个串中0和1的数量是相等的。如果0更多,则均值偏向0;如果1更多,则均值偏向1。后面两种情况计算距离都会偏离0.5,表示这一组数据中的0或1更多,因此对应的特征值就越相似,越难以区分。
为了解决steered BRIEF的这个问题,ORB中引入了rBRIEF。它不使用BRIEF原始论文中选取点对儿的5种方式的任何一种,而是通过统计学习得到一种比较好的选取点集的方法。
首先创建一个300K个关键点的训练集。然后在一个31x31大小的块中做二值测试。每个点对儿是块内部两个5x5的子窗口,一个子窗口相当于一个像素,其灰度值是这个子窗口内所有像素灰度值的均值,可以通过积分图像快速求得。我们记块的宽度,子窗口的宽度
。

因此,子窗口总数量为,计算得到不同的选取点对儿的方式为:
。
注:原始论文中,
。原始论文中N的值并没有覆盖全子窗口,M的值,论文中是有去除一些重叠的区域,但没有找到重叠区域是如何定义的。如果哪位大神清楚请帮忙说明一下。本文中的N和M来自网上的参考资料,更容易理解一点,N取的是全部子窗口(会加1),M按照组合方式计算(不考虑去掉重叠区域)。
rBRIEF算法的最终目的是从这M种选取点对儿方式中找出最优的256中选择方法。算法的流程如下:
1. 在每个样本点的31x31的邻域内,用不同的点对儿选取方式做二值测试,每个样本点对应M个结果。结果是一个300K * M的矩阵,对矩阵每一列计算均值:

2. 根据每一列的均值到0.5的距离对列进行重新排序,得到T(下图为一种可能出现的示意图):

3. 贪心搜索:
a. 将T的第一列取出放到R中;
b. 从T中取下一列,将它和R中的所有的列进行比较。如果相关性大于某个阈值则丢弃,否则将这一列放入R中。
c. 重复b步骤,直到R中选出了256个列。如果最终结果少于256个,则修改阈值再试一次。
经过这几步,最终就能得到256个点对儿的选取方法,结果就是rBREIF。
参考资料
https://www.researchgate.net/publication/221111151_ORB_an_efficient_alternative_to_SIFT_or_SURF![]() https://www.researchgate.net/publication/221111151_ORB_an_efficient_alternative_to_SIFT_or_SURFhttps://web.stanford.edu/class/cs231m/references/harris-stephens.pdf
https://www.researchgate.net/publication/221111151_ORB_an_efficient_alternative_to_SIFT_or_SURFhttps://web.stanford.edu/class/cs231m/references/harris-stephens.pdf![]() https://web.stanford.edu/class/cs231m/references/harris-stephens.pdfhttps://www.researchgate.net/publication/222485725_Measuring_Corner_Properties
https://web.stanford.edu/class/cs231m/references/harris-stephens.pdfhttps://www.researchgate.net/publication/222485725_Measuring_Corner_Properties![]() https://www.researchgate.net/publication/222485725_Measuring_Corner_Propertieshttps://www.researchgate.net/publication/221304115_BRIEF_Binary_Robust_Independent_Elementary_Features
https://www.researchgate.net/publication/222485725_Measuring_Corner_Propertieshttps://www.researchgate.net/publication/221304115_BRIEF_Binary_Robust_Independent_Elementary_Features![]() https://www.researchgate.net/publication/221304115_BRIEF_Binary_Robust_Independent_Elementary_Features02-p2-rbrief_哔哩哔哩_bilibili02-p2-rbrief是02-ORB特征提取的第2集视频,该合集共计2集,视频收藏或关注UP主,及时了解更多相关视频内容。
https://www.researchgate.net/publication/221304115_BRIEF_Binary_Robust_Independent_Elementary_Features02-p2-rbrief_哔哩哔哩_bilibili02-p2-rbrief是02-ORB特征提取的第2集视频,该合集共计2集,视频收藏或关注UP主,及时了解更多相关视频内容。 https://www.bilibili.com/video/BV1PW411M73t?p=2&vd_source=474bff49614e62744eb84e9f8340d91ahttp://media.ee.ntu.edu.tw/courses/cv/21S/slides/cv2021_lec03.pdf
https://www.bilibili.com/video/BV1PW411M73t?p=2&vd_source=474bff49614e62744eb84e9f8340d91ahttp://media.ee.ntu.edu.tw/courses/cv/21S/slides/cv2021_lec03.pdf![]() http://media.ee.ntu.edu.tw/courses/cv/21S/slides/cv2021_lec03.pdf
http://media.ee.ntu.edu.tw/courses/cv/21S/slides/cv2021_lec03.pdf
特征点匹配——ORB算法介绍_orb匹配算法_lhanchao的博客-CSDN博客《ORB: an efficient alternative to SIFT or SURF》是Rublee等人在2011年的ICCV上发表的一篇有关于特征点提取和匹配的论文,这篇论文介绍的方法跳出了SIFT和SURF算法的专利框架,同时以极快的运行速度赢得了众多青睐。下面我简单介绍一下ORB算法的流程。ORB算法的主要贡献如下: (1)为FAST算法提取的特征点加上了一个特征点方向; (2)使_orb匹配算法https://blog.csdn.net/lhanchao/article/details/52612954
相关文章:
ORB特征笔记
简介 ORB Oriented FAST Rotated BRIEF 前面的Oriented FAST说明的是它的关键点的选取是一种改良过的FAST,在FAST的基础上加了方向信息;后面的Rotated BRIEF是指特征描述符使用BRIEF描述子(Binary Robust Independent Elementary Featur…...
12.Netty源码之整体架构脉络
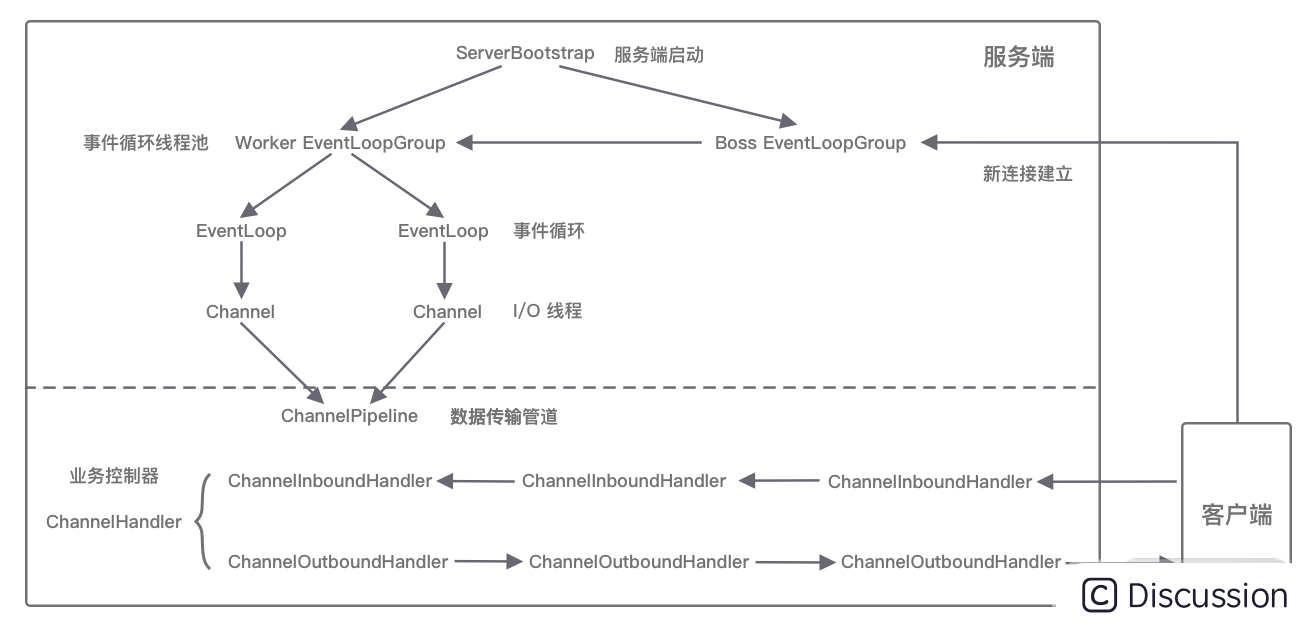
Netty 整体架构脉络 Netty 的逻辑处理架构为典型网络分层架构设计,共分为网络通信层、事件调度层、服务编排层,每一层各司其职。 网络通信层 网络通信层的职责是执行网络 I/O 的操作。它支持多种网络协议和 I/O 模型的连接操作。当网络数据读取到内核缓冲…...
【ArcGIS Pro二次开发】(54):三调名称转用地用海名称
三调地类和用地用海地类之间有点相似但并不一致。 在做规划时,拿到的三调,都需要将三调地类转换为用地用海地类,然后才能做后续的工作。 一般情况下,三调转用地用海存在【一对一,多对一和一对多】3种情况。 前2种情况…...
3D Tiles官方示例资源下载链接
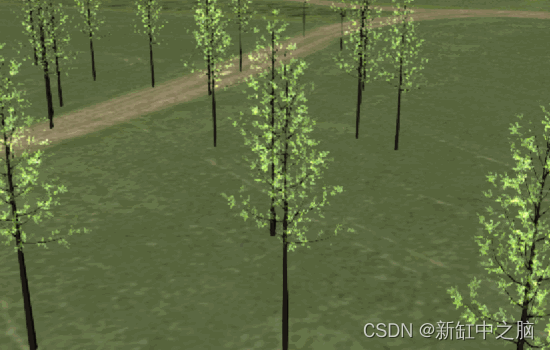
本文列出Cesium官方提供的 3D Tiles 1.0和1.1规范的9个示例切块集(tileset)。 有关如何使用本地服务器托管这些示例的详细信息,请参阅 INSTRUCTIONS.md。 推荐:用 NSDT设计器 快速搭建可编程3D场景。 1、Metadata Granularities …...
【Java】分支结构习题
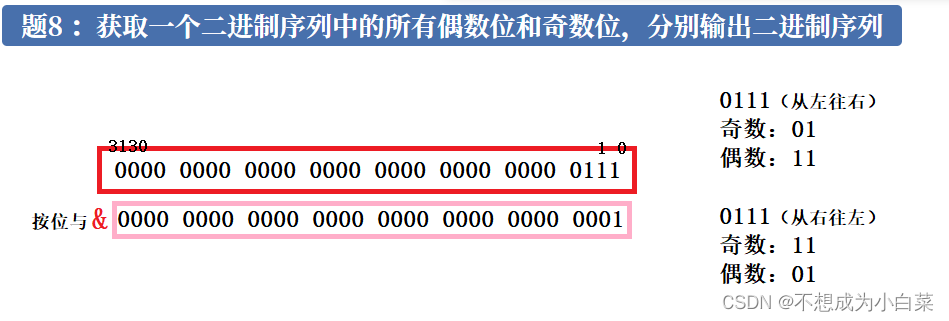
【Java】分支结构 文章目录 【Java】分支结构题1 :数字9 出现的次数题2 :计算1/1-1/21/3-1/41/5 …… 1/99 - 1/100 的值。题3 :猜数字题4 :牛客BC110 X图案题5 :输出一个整数的每一位题6 : 模拟三次密码输…...
删除主表 子表外键没有索引的性能优化
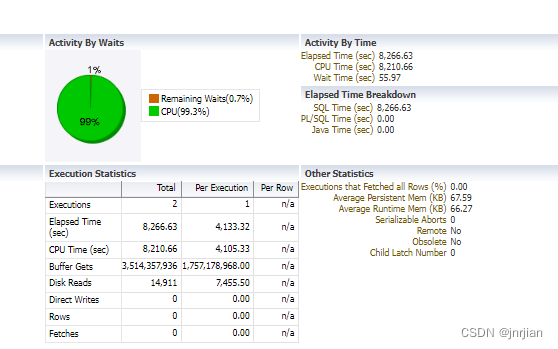
整个表147M,执行时一个CPU耗尽, buffer gets 超过1个G, 启用并行也没有用 今天开发的同事问有个表上的数据为什么删不掉?我看了一下,也就不到100000条数据,表上有外键,等了5分钟hang在那里&…...

面向切面编程AOP
面向切面编程简介 IoC使软件组件松耦合。AOP让你能够捕捉系统中经常使用的功能,把它转化成组件。 AOP(Aspect Oriented Programming):面向切面编程,面向方面编程。(AOP是一种编程技术) AOP是对…...
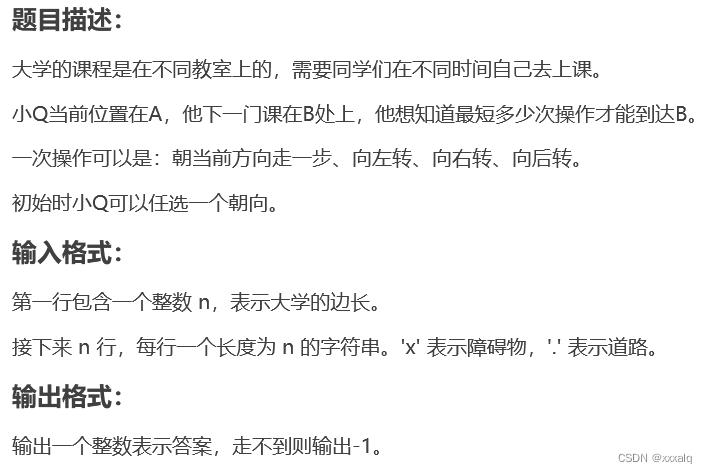
大学生活题解
样例输入: 3 .xA ... Bx.样例输出: 6思路分析: 这道题只需要在正常的广搜模板上多维护一个— —方向,如果当前改变方向,就坐标不变,方向变,步数加一;否则坐标变,方向不…...
flask的配置项
flask的配置项 为了使 Flask 应用程序正常运行,有多种配置选项需要考虑。下面是一些基本的 Flask 配置选项: DEBUG: 这个配置项决定 Flask 是否应该在调试模式下运行。如果这个值被设为 True,Flask 将会提供更详细的错误信息,并…...

暑假刷题第16天--7/28
143. 最大异或对 - AcWing题库(字典树) #include<iostream> using namespace std; const int N100005; int a[N]; int nex[10000007][2],cnt; void insert(int x){int p0;for(int i30;i>0;i--){int ux>>i&1;if(!nex[p][u])nex[p][u]…...

vue vite ts electron ipc arm64
初始化 npm init vue # 全选 yes npm i # 进入项目目录后使用 npm install electron electron-builder -D npm install commander -D # 额外组件增加文件 新建 plugins 文件夹 src/background.ts 属于主进程 ipcMain.on、ipcMain.handle 都用于主进程监听 ipc,…...
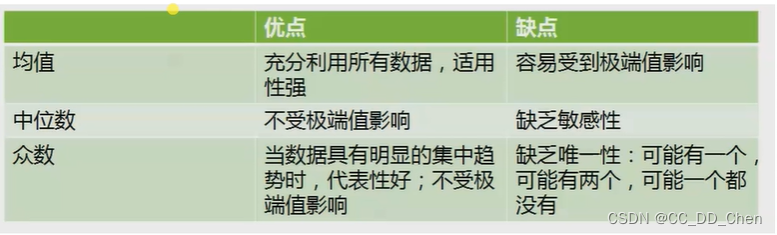
数据分析-关于指标和指标体系
一、电商指标体系 二、指标体系的作用 三、统计学中基本的分析手段...

Vue+ElementUI操作确认框及提示框的使用
在进行数据增删改查操作中为保证用户的使用体验,通常需要显示相关操作的确认信息以及操作结果的通知信息。文章以数据的下载和删除提示为例进行了简要实现,点击下载以及删除按钮,会出现对相关信息的提示,操作结果如下所示。 点击…...
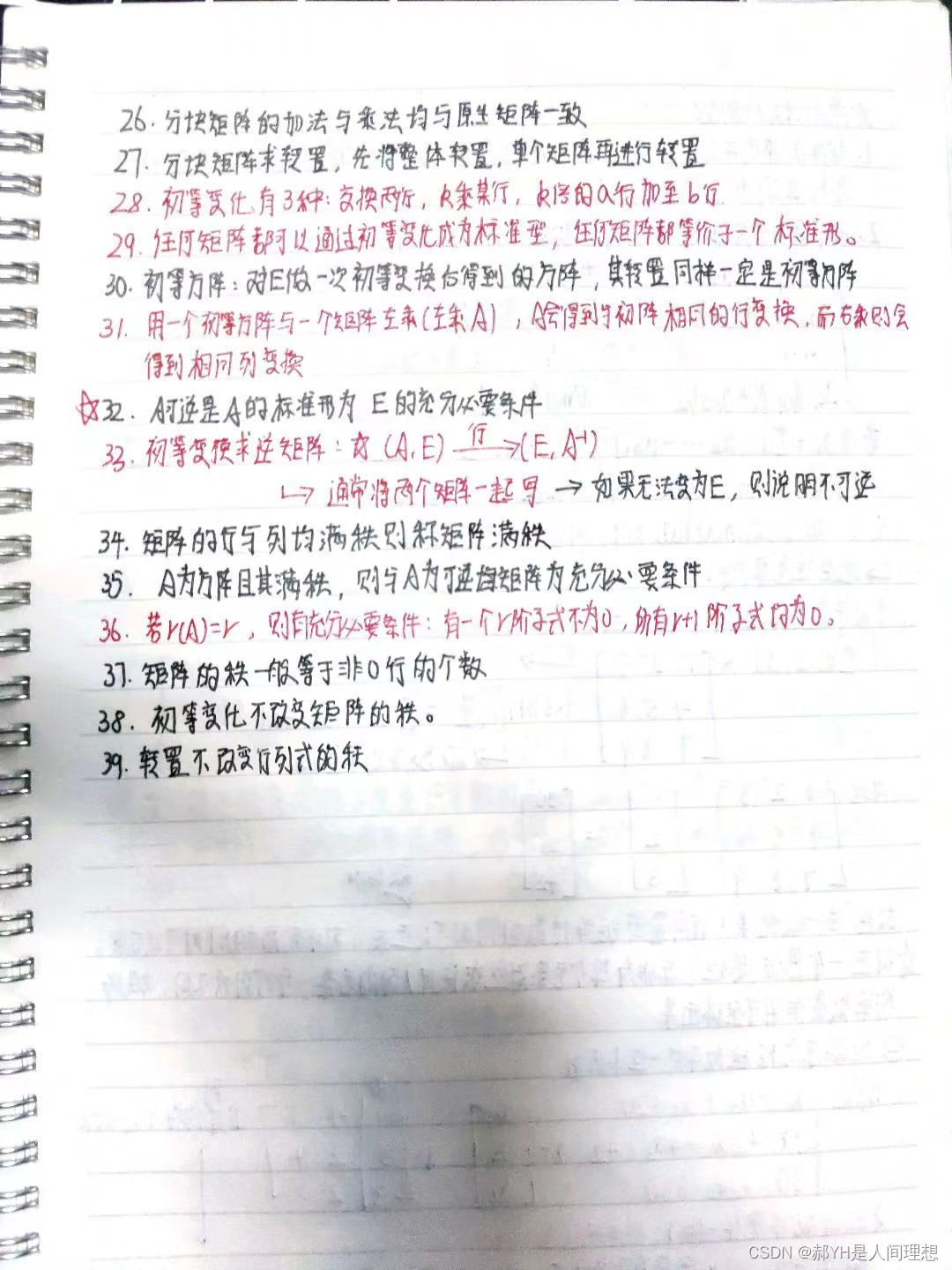
宋浩线性代数笔记(二)矩阵及其性质
更新线性代数第二章——矩阵,本章为线代学科最核心的一章,知识点多而杂碎,务必仔细学习。 重难点在于: 1.矩阵的乘法运算 2.逆矩阵、伴随矩阵的求解 3.矩阵的初等变换 4.矩阵的秩 (去年写的字,属实有点ugl…...

Linux之Shell 编程详解(二)
第 9 章 正则表达式入门 正则表达式使用单个字符串来描述、匹配一系列符合某个语法规则的字符串。在很多文 本编辑器里,正则表达式通常被用来检索、替换那些符合某个模式的文本。在 Linux 中,grep, sed,awk 等文本处理工具都支持…...
TCP网络通信编程之字节流
目录 【TCP字节流编程】 // 网络编程中,一定是server端先运行 【案例1】 【思路分析】 【客户端代码】 【服务端代码】 【结果展示】 【案例2】 【题目描述】 【注意事项】 【服务端代码】 【客户端代码】 【代码结果】 【TCP字节流编程】 // 网络编程中&a…...
【暑期每日一练】 day8
目录 选择题 (1) 解析: (2) 解析: (3) 解析: (4) 解析: (5) 解析: 编程题 题一 描述…...

maven的基本学习
maven https://www.bilibili.com/video/BV14j411S76G?p1&vd_source5c648979fd92a0f7ba8de0cde4f02a6e 1.简介 1.1介绍 Maven翻译为"专家"、“内行”,是Apache下的一个纯Java开发的开源项目。基于项目对象模型(缩写:POM)概念,Maven利用一…...
疲劳驾驶检测和识别2:Pytorch实现疲劳驾驶检测和识别(含疲劳驾驶数据集和训练代码)
疲劳驾驶检测和识别2:Pytorch实现疲劳驾驶检测和识别(含疲劳驾驶数据集和训练代码) 目录 疲劳驾驶检测和识别2:Pytorch实现疲劳驾驶检测和识别(含疲劳驾驶数据集和训练代码) 1.疲劳驾驶检测和识别方法 2.疲劳驾驶数据集 (1)疲…...
安防监控视频汇聚EasyCVR修改录像计划等待时间较长,是什么原因?
安防监控视频EasyCVR视频融合汇聚平台基于云边端智能协同,支持海量视频的轻量化接入与汇聚、转码与处理、全网智能分发等。音视频流媒体视频平台EasyCVR拓展性强,视频能力丰富,具体可实现视频监控直播、视频轮播、视频录像、云存储、回放与检…...

AI时代程序员职业发展与个人创业可行性研究报告
一、行业宏观变革(2026核心趋势数据佐证) 1.1 开发范式已彻底重构(行业不可逆拐点) 2026年正式进入AI Agent智能体开发时代,传统CRUD编码价值持续崩塌。 核心权威数据: Gartner预测:2026年75%企…...

SSH工具对比:新手用户和熟练运维,选型逻辑有什么不同
结论 新手用户和熟练运维在选择 SSH 工具时,关注点往往完全不同。 新手更在意的是:能不能顺利连接、界面是否直观、文件和配置是否容易找到、网站出问题时能不能快速定位。 而熟练运维更在意的是:连接效率、命令自由度、多服务器管理能力、原…...

Vulnhub-DC-1
1.信息收集 使用工具nmap扫描主机端口 这是Drupal是使用PHP语言编写的开源内容管理框架(CMF),它由内容管理系统(CMS)和PHP开发框架(Framework)共同构成 Web指纹扫描 发现是:drupal…...

智慧树自动刷课助手:3步告别手动操作的学习效率工具
智慧树自动刷课助手:3步告别手动操作的学习效率工具 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复刷课操作而烦恼吗?智…...

PentestGPT实战部署指南:AI驱动的渗透测试工作流落地
1. 这不是另一个“AI安全”的概念玩具,而是一套能真正跑起来的渗透测试辅助工作流“PentestGPT”这个名字刚在GitHub上出现时,我第一反应是点开又关掉——过去三年里,我见过太多打着“AI渗透”旗号的项目:有的只是把ChatGPT API封…...
)
保姆级避坑指南:在Ubuntu 22.04上搞定ROS2 Humble、PX4与Gazebo的联合仿真(附Empy版本降级)
保姆级避坑指南:Ubuntu 22.04下ROS2 Humble与PX4联合仿真的21个关键陷阱当你在Ubuntu 22.04上第一次尝试搭建ROS2 Humble、PX4与Gazebo的联合仿真环境时,可能会遇到比预期更多的挑战。这不是一个简单的"复制粘贴命令就能完成"的任务——版本冲…...

企业内统一API网关与Taotoken聚合平台对接方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内统一API网关与Taotoken聚合平台对接方案 在推进AI应用落地的过程中,许多中大型企业面临一个共同挑战:…...

武汉国电华美16875kVA串联谐振试验装置,这手活儿细
在超高压变电站和长距离电缆的现场,交流耐压试验是检验设备绝缘的“最后一关”。这位老师傅经手过不少大工程,他说,面对GIS、大型变压器这些“大块头”电容性试品,能不能顺利“过关”,往往就看串联谐振装置顶不顶得住。…...

WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案
WarcraftHelper终极指南:深度解析魔兽争霸III现代化兼容性解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专…...
用Azure Kinect DK和Body Tracking SDK,5分钟实现一个实时人体骨骼点检测Demo(C++版)
5分钟实战:用Azure Kinect DK实现实时人体骨骼点追踪(C版) 当你第一次拿到Azure Kinect DK时,最令人兴奋的莫过于它强大的人体追踪能力。这款深度相机不仅能捕捉高清彩色图像,更能通过AI算法实时重建人体骨骼关节点。本…...