驱动开发 day3 (模块化驱动启动led,蜂鸣器,风扇,震动马达)
模块化驱动启动led,蜂鸣器,风扇,震动马达并加上Makefile
封装模块化驱动,可自由安装卸载驱动,便于驱动更新(附图)
1.安装模块驱动同时初始化各个设备并使能
2.该驱动会自动创建驱动节点.
3.通过c函数程序输入控制各个设备
4.卸载模块驱动
//编译驱动(注意Makefile的编译到移植到开发板的内核)
make arch=arm
//安装驱动
insmod mycdev.ko
//卸载驱动
rmmod mycdev
//编译fun.c 函数(用到交叉工具编译)
arm-linux-gnueabihf-gcc fun.c
head.h //头文件
#ifndef __HEAD_H__
#define __HEAD_H__typedef struct{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
}gpio_t;
#define PHY_LED1_ADDR 0X50006000 //GPIOE 10
#define PHY_LED2_ADDR 0X50007000 //GPIOF 10
#define PHY_LED3_ADDR 0X50006000 //GPIOE 8
#define PHY_RCC_ADDR 0X50000A28 //RCC#define PHY_FAN_ADDR 0X50006000 //GPIOE 9 TIM1 风扇
#define PHY_ATO_ADDR 0X50007000 //GPIOF 6 TIM16 震动马达
#define PHY_WMM_ADDR 0X50003000 //GPIOB 6 TIM4 蜂鸣器//功能码
#define LED_ON _IOW('1',1,int)
#define LED_OFF _IOW('1',0,int)#endif // MACRO
mycmod.c //驱动函数
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include "head.h"unsigned int major;
char kbuf[128] = {0};gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;gpio_t *vir_wmm;
gpio_t *vir_fan;
gpio_t *vir_ato;unsigned int *vir_rcc;struct class *cls;
struct device *dev;int mycdev_open(struct inode *inode,struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}long mycdev_ioctl(struct file *file,unsigned int cmd,unsigned long arg)
{int which;copy_from_user(&which,(void *)arg,4);switch (cmd){case LED_ON:switch (which){case 1: // LED1vir_led1->ODR |= (0x1 << 10); // LED1开灯break;case 2: // LED2vir_led2->ODR |= (0x1 << 10); // LED2开灯break;case 3: // LED3vir_led3->ODR |= (0x1 << 8); // LED3开灯break;case 4: // FANvir_fan->ODR |= (0x1 << 9); // FAN开灯break;case 5: // ATOvir_ato->ODR |= (0x1 << 6); // ATO开灯break;case 6: // WMMvir_wmm->ODR |= (0x1 << 6); // WMM开灯break;}break;case LED_OFF:switch (which){case 1:vir_led1->ODR &= (~(0X1 << 10));break;case 2:vir_led2->ODR &= (~(0X1 << 10));break;case 3:vir_led3->ODR &= (~(0X1 << 8));break;case 4:vir_fan->ODR &= (~(0X1 << 9));break;case 5:vir_ato->ODR &= (~(0X1 << 6));break;case 6:vir_wmm->ODR &= (~(0X1 << 6));break;default:return -1;}default:return -1;}return 0;
}int mycdev_close(struct inode *inode,struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}//定义操作方法结构体变量并赋值
struct file_operations fops={.open = mycdev_open,.release = mycdev_close,.unlocked_ioctl = mycdev_ioctl,
};int all_led_init(void)
{// 寄存器地址的映射vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));if (vir_led1 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));if (vir_led2 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_fan = vir_led1;vir_ato = vir_led2;vir_wmm = ioremap(PHY_WMM_ADDR, sizeof(gpio_t));if (vir_wmm == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_rcc = ioremap(PHY_RCC_ADDR, 4);if (vir_rcc == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}printk("物理地址映射成功\n");// 寄存器的初始化// rcc(*vir_rcc) |= (3 << 4);(*vir_rcc) |= (1 << 1);// led1vir_led1->MODER &= (~(3 << 20));vir_led1->MODER |= (1 << 20);vir_led1->ODR &= (~(1 << 10));// led2vir_led2->MODER &= (~(3 << 20));vir_led2->MODER |= (1 << 20);vir_led2->ODR &= (~(1 << 10));// led3vir_led3->MODER &= (~(3 << 16));vir_led1->MODER |= (1 << 16);vir_led1->ODR &= (~(1 << 8));// WMM B 6vir_wmm->MODER &= (~(3 << 12));vir_wmm->MODER |= (1 << 12);vir_wmm->ODR &= (~(1 << 6));// FAM E 9vir_fan->MODER &= (~(3 << 18));vir_fan->MODER |= (1 << 18);vir_fan->ODR &= (~(1 << 9));// ATO F 6vir_ato->MODER &= (~(3 << 12));vir_ato->MODER |= (1 << 12);vir_ato->ODR &= (~(1 << 6));printk("寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{int i;//字符设备驱动注册major = register_chrdev(0,"mycdev",&fops);if(major < 0){printk("注册失败\n");return major;}printk("注册成功major = %d\n",major);//向上提交目录cls = class_create(THIS_MODULE,"mycdev");if(IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录信息成功\n");//向上提交设备节点信息for(i = 0;i < 3; i++){dev = device_create(cls,NULL,MKDEV(major,i),NULL,"myled%d",i);if(IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点信息成功\n");//寄存器映射以及初始化all_led_init();return 0;}
static void __exit mycdev_exit(void)
{int i;//设备初始化all_led_init();//取消虚拟映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_led3);iounmap(vir_rcc);//销毁节点信息for(i = 0; i < 3; i++){device_destroy(cls,MKDEV(major,i));}//销毁目录信息class_destroy(cls);//注销字符设备驱动unregister_chrdev(major,"mycdev");printk("出口函数\n");
}module_init(mycdev_init);module_exit(mycdev_exit);MODULE_LICENSE("GPL");
fun.c
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <sys/ioctl.h>
#include <string.h>
#include "head.h"int main(int argc, char const *argv[])
{/* code */int a,b;char buf[128] = {0};printf("调用open\n");int fd = open ("/dev/myled0",O_RDWR);if(fd < 0){printf("打开设备文件失败\n");exit(-1);}while(1){//从终端读取printf("请输入指令\n");printf("0(关) 1(开)\n");printf("请输入>");scanf("%d",&a);if(a){printf("打开以下设备\n");}else{printf("关闭以下设备\n");}printf(" 1(LED1) 2(LED2) 3(LED3)\n");printf(" 4(FAN) 5(ATO) 6(WMM)\n");printf("请输入要控制的设备:");scanf("%d",&b);switch(a){case 1:ioctl(fd,LED_ON,&b);//开灯break;case 0:ioctl(fd,LED_OFF,&b);break;}}printf("调用close\n");close (fd); return 0;
}Makefile
modname ?= mycdevarch ?= armifeq ($(arch),arm)
KERNELDIR:= /home/ubuntu/13_UBOOT/linux-stm32mp-5.10.61-stm32mp-r2-r0/linux-5.10.61
else
KERNELDIR:=/lib/modules/$(shell uname -r)/build/
endifPWD:=$(shell pwd)all:make -C $(KERNELDIR) M=$(PWD) modulesclean:make -C $(KERNELDIR) M=$(PWD) cleanobj-m:=$(modname).o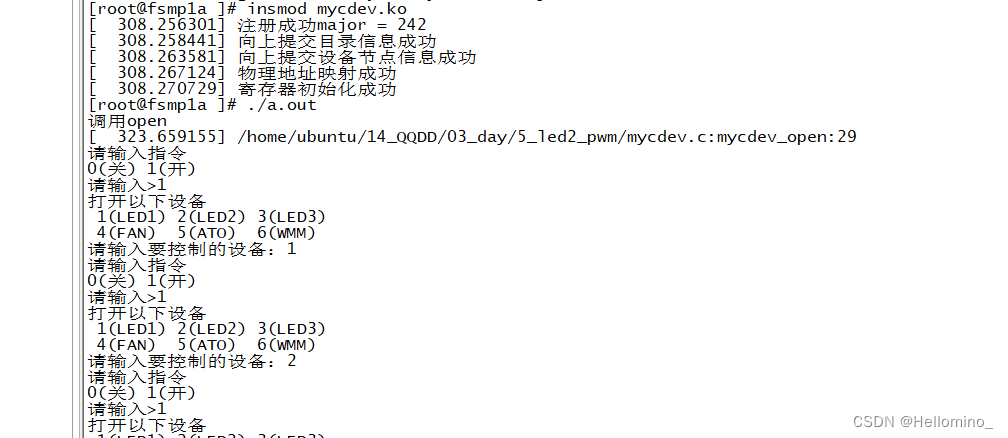
相关文章:
驱动开发 day3 (模块化驱动启动led,蜂鸣器,风扇,震动马达)
模块化驱动启动led,蜂鸣器,风扇,震动马达并加上Makefile 封装模块化驱动,可自由安装卸载驱动,便于驱动更新(附图) 1.安装模块驱动同时初始化各个设备并使能 2.该驱动会自动创建驱动节点. 3.通过c函数程序输入控制各个设备 4.卸载模块驱动 //编译驱动…...
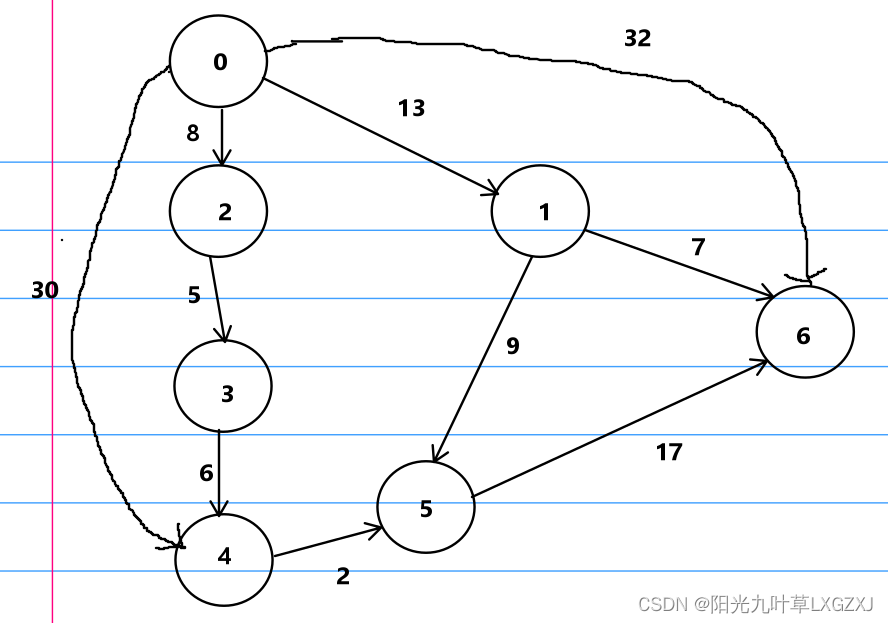
数据结构与算法基础-学习-27-图之最短路径之Dijkstra(迪杰斯特拉)算法
一、最短路径应用案例 例如从北京到上海旅游,有多条路可以到目的地,哪条路线最短,哪条路线最省钱,就是典型的最短路径问题。 二、最短路径问题分类 最短路径问题可以分为两类,第一类为:两点间最短路径。第…...
Windows Server 2012 能使用的playwright版本
由于在harkua_bot里面使用到了playwright,我的服务器又是Windows Server 2012 R2,最新版playwright不支持Windows Server 2012 R2,支持Windows Server 2016以上,所以有了这个需求 https://cdn.npmmirror.com/binaries/playwright…...

css实现溢出变为省略号
单行文本溢出省略 text-overflow:规定当文本溢出时,显示省略符号来代表被修剪的文本 white-space:设置文字在一行显示,不能换行 overflow:文字长度超出限定宽度,则隐藏超出的内容overflow设为hidden&#…...

nginx如何配置两个服务器的连接
nginx 中通过server_name listen的方式配置多个服务器 nginx配置两个站点的windows操作方法,双域名双站点...

Linux环境Arduino IDE中配置ATOM S3
linux选择ubuntu发行版。 硬件设备有多小呢: 功能超级强大。 之前的ROS1和ROS2案例已经全部移植完成并测试结束(三轮纯人力校验😎)。 官网文档信息非常非常好: https://docs.m5stack.com/zh_CN/quick_start/atoms3…...
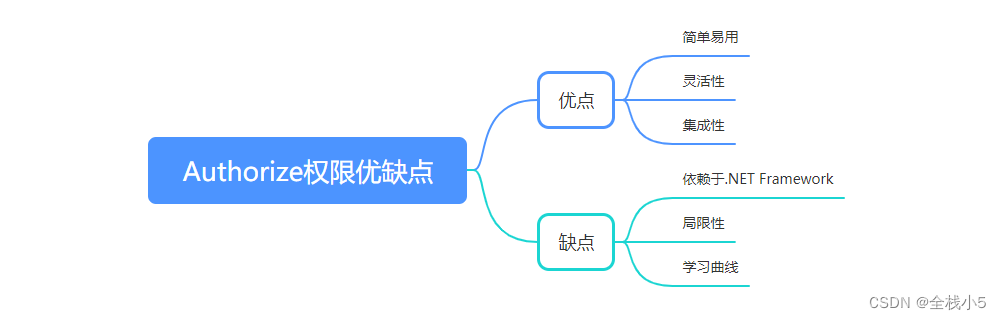
【C#】.Net Framework框架下的Authorize权限类
2023年,第31周,第3篇文章。给自己一个目标,然后坚持总会有收货,不信你试试! 在C#的.NET Framework中,你可以使用Authorize类来处理权限认证。Authorize类位于System.Web.Mvc命名空间中,它提供了…...

C++ list底层实现原理
文章目录 一、list底层实现二、类构成三、构造函数四、迭代器五、获取第一个元素六、获取最后一个元素七、插入元素 一句话:list底层实现一个双向循环链表 一、list底层实现 一个双向循环链表 二、类构成 class list : protected_List_base_list_base.lsit_impl…...

C#实现数字验证码
开发环境:VS2019,.NET Core 3.1,ASP.NET Core API 1、建立一个验证码控制器 新建两个方法Create和Check,Create用于创建验证码,Check用于验证它是否有效。 声明一个静态类变量存放列表,列表中存放包含令…...

Git的常用命令以及使用场景
文章目录 1.前言2.工作区,暂存区,版本库简介3.Git的常用命令4.版本回退5.撤销修改6.删除文件7.总结 1.前言 在学习Git命令之前,需要先了解工作区,暂存区和版本库这三个概念 2.工作区,暂存区,版本库简介 在使用Git进行版本控制时,有三个重要的概念:工作…...

tcp keepalive
tcp keepalive用于检查两者之间的链路是否正常,或防止链路断开。 一旦建立了TCP连接,该连接被定义为有效,直到一方关闭它。一旦连接进入连接状态,它将无限期地保持连接状态。但实际上,这种联系不会无限期地持续下去。如…...
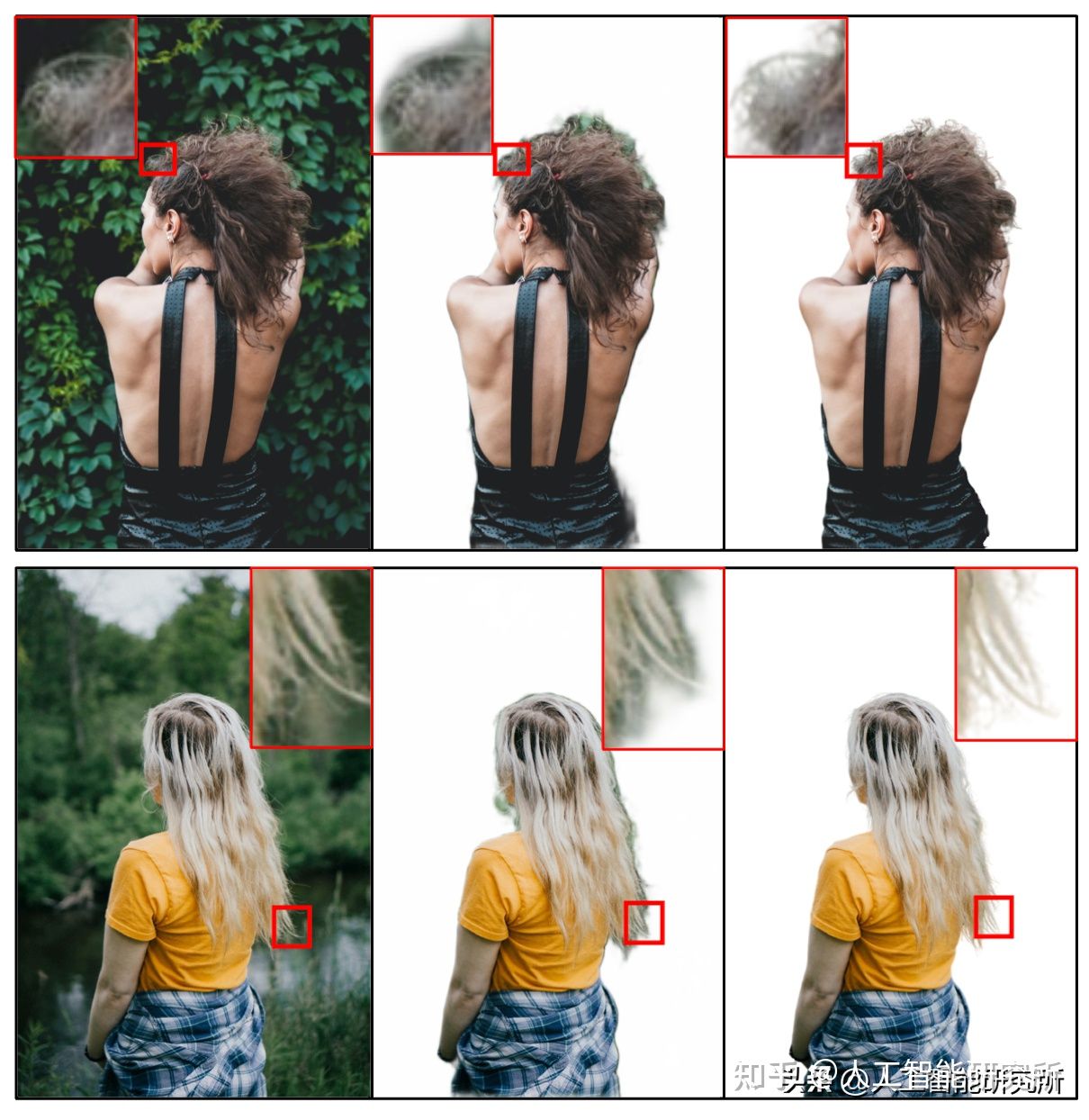
PP-Matting: AI高精度图像前景Matting,让抠图轻而易举
分割和Matting的一个重要区别是:分割返回的是像素分类标签,其结果是整型数据;而Matting返回的是属于前景或背景的概率P,从而在前景与背景交互区域产生渐变的效果,使得抠图更加自然。Matting分割模型训练完成后,对于原始图像每个位置上的像素,都将生成一个表示其前景透明…...

VUE3-01
1.选项式和组合式 选项式API:按照作用组织代码 组合式API:按照功能组织代码 2.<script setup> <template><div class"about"><h1>{{name}}</h1><button click"sayHello">测试</button>…...
分库分表之基于Shardingjdbc+docker+mysql主从架构实现读写分离(二)
说明:如果实现了docker部署mysql并完成主从复制的话再继续,本篇文章主要说明springboot配置实现Shardingjdbc进行读写分离操作。 如果没实现docker部署mysql实现主从架构的话点击我 Shardingjdbc配置介绍(版本:5.3.2)…...

Python 进阶(四):日期和时间(time、datetime、calendar 模块)
❤️ 博客主页:水滴技术 🌸 订阅专栏:Python 入门核心技术 🚀 支持水滴:点赞👍 收藏⭐ 留言💬 文章目录 1. time模块1.1 获取当前时间1.2 时间休眠1.3 格式化时间 2. datetime模块2.1 获取当前…...

Transformer背景介绍
目录 Transformer的诞生Transformer的优势Transformer的市场 Transformer的诞生 论文地址 Transformer的优势 Transformer的市场...

深入理解BeanDefinition和Spring Beans
深入理解BeanDefinition和Spring Beans 引言 在Spring框架中,BeanDefinition和Spring Beans是非常重要的概念。BeanDefinition定义了Spring Bean的元数据,而Spring Beans是应用程序中的对象实例。理解BeanDefinition和Spring Beans的概念和使用方法对于…...
实验六 调度器-实验部分
目录 一、知识点 1.进程调度器设计的目标 1.1.进程的生命周期 1.2.用户进程创建与内核进程创建 1.3.进程调度器的设计目标 2.ucore 调度器框架 2.1.调度初始化 2.2.调度过程 2.2.1.调度整体流程 2.2.2.设计考虑要点 2.2.3.数据结构 2.2.4.调度框架应与调度算法无关…...

基于飞桨paddle波士顿房价预测练习模型测试代码
基于飞桨paddle波士顿房价预测练习模型测试代码 导入基础库 #paddle:飞桨的主库,paddle 根目录下保留了常用API的别名,当前包括:paddle.tensor、paddle.framework、paddle.device目录下的所有API; import paddle #Lin…...
只会“点点点”,凭什么让开发看的起你?
众所周知,如今无论是大厂还是中小厂,自动化测试基本是标配了,毕竟像双 11、618 这种活动中庞大繁杂的系统,以及多端发布、多版本、机型发布等需求,但只会“写一些自动化脚本”很难胜任。这一点在招聘要求中就能看出来。…...
)
从STM32迁移到普冉PY32F003:UART代码移植保姆级教程(附HAL库对比)
从STM32到普冉PY32F003的UART代码迁移实战指南 1. 国产MCU替代浪潮下的技术选择 近年来,半导体行业的供应链波动促使更多工程师将目光投向国产MCU解决方案。普冉PY32F003系列作为Cortex-M0内核的代表产品,以48MHz主频、64KB Flash和8KB RAM的配置&#x…...

HFSS仿真结果怎么看?一文读懂S参数与电场图,让你的T型波导分析不再迷茫
HFSS仿真结果深度解析:从S参数到电场图的工程实践指南面对HFSS仿真生成的复杂数据图表,许多工程师常陷入"看得见数据却读不懂含义"的困境。本文将带您穿透数据表象,掌握T型波导性能分析的核心方法论。1. S参数:波导性能…...
到panic:深入Linux 5.4内核,看异常处理如何层层递进)
从BUG()到panic:深入Linux 5.4内核,看异常处理如何层层递进
从BUG()到panic:Linux内核异常处理的防御体系全解析当你在深夜调试一个内核模块时,突然屏幕刷出一串红色警告——这可能是每个Linux内核开发者都经历过的噩梦时刻。但你是否想过,从第一行警告出现到系统完全崩溃,内核究竟经历了怎…...

TorchDynamo与TorchInductor:PyTorch编译器生态的完整解析
TorchDynamo与TorchInductor:PyTorch编译器生态的完整解析 【免费下载链接】torchdynamo A Python-level JIT compiler designed to make unmodified PyTorch programs faster. 项目地址: https://gitcode.com/gh_mirrors/to/torchdynamo TorchDynamo 是一个…...

如何快速掌握MPC视频渲染器:面向初学者的完整教程
如何快速掌握MPC视频渲染器:面向初学者的完整教程 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer 想要在Windows系统上获得影院级的视频播放体验吗?MPC…...

基于CNN的食双星光变曲线自动化参数初估模型EBOP MAVEN
1. 项目概述与核心价值在恒星天体物理领域,食双星系统一直扮演着“宇宙实验室”的关键角色。通过分析两颗恒星相互绕转时周期性相互遮挡产生的光变曲线,我们可以像解谜一样,精确反演出恒星的质量、半径、轨道倾角等基本物理参数。这些参数是构…...

AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程
AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想要让你的…...

《关于 AI Agent 基础设施的一些奇思妙想》
目录 目录 目录 一、AI Agent 容器 问题背景 想法思路:API 中转站模式 多 Agent 切换 二、手机端操控 AI Agent(手机与电脑互联) 三、AI 开发依赖管理工具 总结 最近 AI Agent 越来越火,我作为一个重度使用者,…...

UE5 GPU崩溃终极解决方案:Windows TDR注册表调优指南
1. 这不是玄学,是显卡驱动与UE引擎的底层握手失败 你刚点下Play,编辑器还没完全加载完场景,屏幕突然黑一下,然后弹出“GPU has stopped responding and has recovered”——或者更糟,直接蓝屏、黑屏死机、编辑器无响应…...

别急着买内存条!先花5分钟用Win自带工具查清你的笔记本有几个卡槽、最大支持多少G
笔记本内存升级避坑指南:5分钟摸清扩容上限与双通道配置每次打开浏览器标签超过十个就开始卡顿,PS处理图片时进度条仿佛在爬行,剪辑视频时渲染时间足够泡一杯咖啡——这些场景是否让你动了升级笔记本内存的念头?先别急着下单&…...