UVA-1354 天平难题 题解答案代码 算法竞赛入门经典第二版
GitHub - jzplp/aoapc-UVA-Answer: 算法竞赛入门经典 例题和习题答案 刘汝佳 第二版
这道题需要:
1. 遍历二叉树的每种构成方式。我这里每次把当前所有结点列出,然后遍历选取两个组合构成一个新结点,原来的结点剔除,新结点加入。最后只剩一个结点时,就得到二叉树的一种情况。我这里相当于是从叶子结点向上遍历。由于数据量较少,所以我这里没有剪枝。
注意选取两个结点后也对应着两种,A放在左边B放在右边 和 B放在左边A放在右边。
2. 计算宽度时,左侧的宽度除了【左子树的宽度+绳子左侧的长度】之外,右子树的左子树也可能很宽,超过【左子树的宽度+绳子左侧的长度】。因此,要对【右子树的左子树-绳子右侧的长度】和【左子树的宽度+绳子左侧的长度】进行比较,看看谁更长。右侧同理。
#include<stdio.h>
#include<string.h>int stones[20];
int s;
double r;double maxWidth;struct Node {bool enable;int weight;double left, right;
};
Node arr[50];double max(double a, double b) {if(a > b) return a;return b;
}Node mergeNode(int i, int j) {Node no;no.enable = true;no.weight = arr[i].weight + arr[j].weight;double a = (double)arr[i].weight / no.weight;double b = (double)arr[j].weight / no.weight;no.left = max(b + arr[i].left, arr[j].left - a);no.right = max(a + arr[j].right, arr[i].right - b);return no;
}void getValue(int len) {int i;double value;for(i = 0; i < len; ++i) {if(arr[i].enable) {value = arr[i].left + arr[i].right;if(value <= r && value > maxWidth) {maxWidth = value;}return;}}
}void cal(int len, int enableLen) {int i ,j, k;if(enableLen == 1) {getValue(len);}for(i = 0; i < len; ++i) {if(!arr[i].enable) continue;for(j = i + 1; j < len; ++j) {if(!arr[j].enable) continue;// 二重循环找到一个组合 区分组合在左边和在右边的场景 --enableLen;arr[i].enable = false;arr[j].enable = false;arr[len] = mergeNode(i, j);cal(len+1, enableLen);arr[len] = mergeNode(j, i);cal(len+1, enableLen);++enableLen;arr[i].enable = true;arr[j].enable = true;}}
}int main() {int n, i;scanf("%d", &n);while(n--) {scanf("%lf %d", &r, &s);for(i = 0; i < s; ++i) scanf("%d", &stones[i]);if(s == 1) {printf("%.16lf\n", 0.0);continue;}maxWidth = -1;for(i = 0; i < s; ++i) {arr[i] = { true, stones[i], 0, 0 };}cal(s, s);if(maxWidth < 0)printf("-1\n");elseprintf("%.16lf\n", maxWidth);}return 0;
}相关文章:

UVA-1354 天平难题 题解答案代码 算法竞赛入门经典第二版
GitHub - jzplp/aoapc-UVA-Answer: 算法竞赛入门经典 例题和习题答案 刘汝佳 第二版 这道题需要: 1. 遍历二叉树的每种构成方式。我这里每次把当前所有结点列出,然后遍历选取两个组合构成一个新结点,原来的结点剔除,新结点加入。…...
电机故障诊断(python程序,模型为CNN结合LSTM)
代码运行环境要求:TensorFlow版本>2.4.0,python版本>3.6.0 运行效果视频:电机故障诊断(python代码)_哔哩哔哩_bilibili 1.电机常见的故障类型有以下几种: 轴承故障:轴承是电机运转时最容…...
ubuntu 20.04 rtc时间显示问题探究
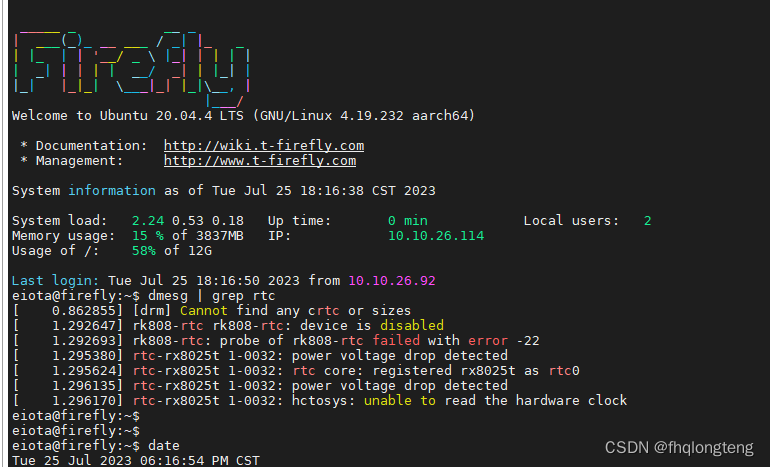
1、硬件与软件 本次测试的硬件为RK3568芯片,操作系统为ubuntu 20.04。 2、RTC与系统时间 先说结果,如果RTC驱动不可用或者RTC内部存储的时间非法, 那么操作系统会存储上一次有效的时间,当再次上电时,date命令会使用存储…...

数值分析第七章节 用Python实现非线性方程与方程组的数值解法
参考书籍:数值分析 第五版 李庆杨 王能超 易大义编 第7章 非线性方程与方程组的数值解法 文章声明:如有发现错误,欢迎批评指正 文章目录 迭代法求解 x e x − 1 0 xe^x-10 xex−10牛顿法求解 x e x − 1 0 xe^x-10 xex−10简化牛顿法求解 …...
利用MATLAB制作DEM山体阴影
在地理绘图中,我们使用的DEM数据添加山体阴影使得绘制的图件显得更加的美观。 GIS中使用ArcGIS软件就可以达到这一目的,或者使用GMT,同样可以得到山体阴影的效果。 本文提供了一个MATLAB的函数,可以得到山体阴影。 clear all;c…...

ubuntu 使用 rsync 的 SSH 方式同步备份远程WEB服务器
ubuntu 20.04 自带 rsync ,对于 WEB 服务器这种更新频率不高的情况,直接使用定时同步复制远程服务器的方法,比较直接和简单! $ rsync --version rsync version 3.1.3 protocol version 31 参考: Ubuntu20.04中的rsyn…...
机器学习 | Python实现NARX模型预测控制
机器学习 | Python实现NARX模型预测控制 目录 机器学习 | Python实现NARX模型预测控制效果一览基本介绍研究内容程序设计参考资料效果一览 基本介绍 机器学习 | Python实现NARX模型预测控制 研究内容 贝叶斯黑盒模型预测控制,基于具有外源输入的非线性自回归模型的预期自由能最…...
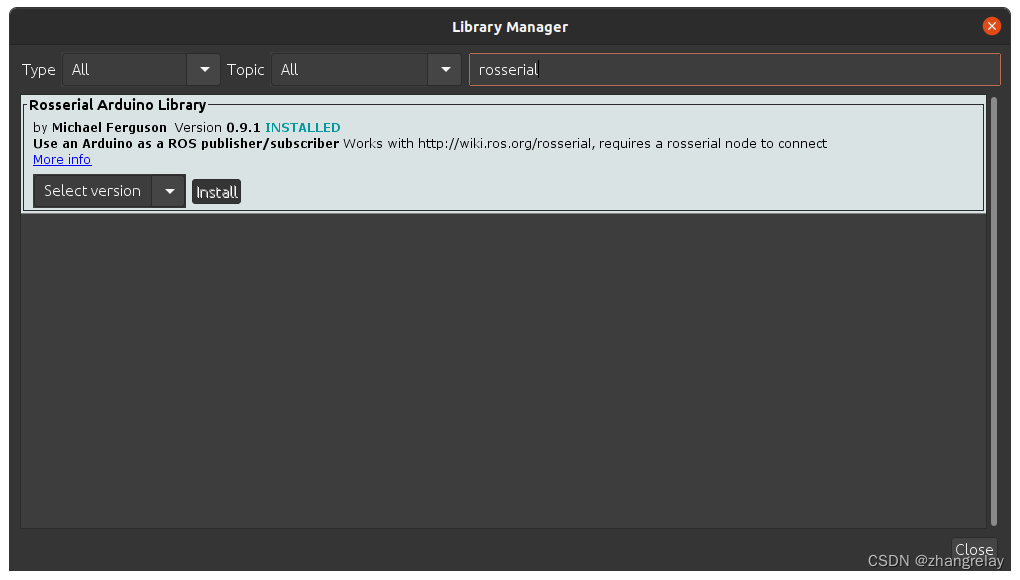
M5ATOMS3基础03给ROS1发一个问候(rosserial)
引出问题 关于之前2020年的博客: 01. ESP8266和ROS调试一些问题汇总 02. ESP8266和ESP32配置(需使用ROS1和ROS2) 效果展示 使用M5ATOMS3与ROS1(kinetic,melodic,noetic)版本通信比较通用的是…...
基于Vue3实现鼠标按下某个元素进行移动,实时改变左侧或右侧元素的宽度,以及点击收起或展开的功能
其原理主要是利用JavaScript中的鼠标事件来控制CSS样式。大致就是监听某个DOM元素的鼠标按下事件,以及按下之后的移动事件和松开事件。在鼠标按下且移动过程中,可实时获得鼠标的X轴坐标的值,通过简单计算,可计算出目标元素的宽度&…...
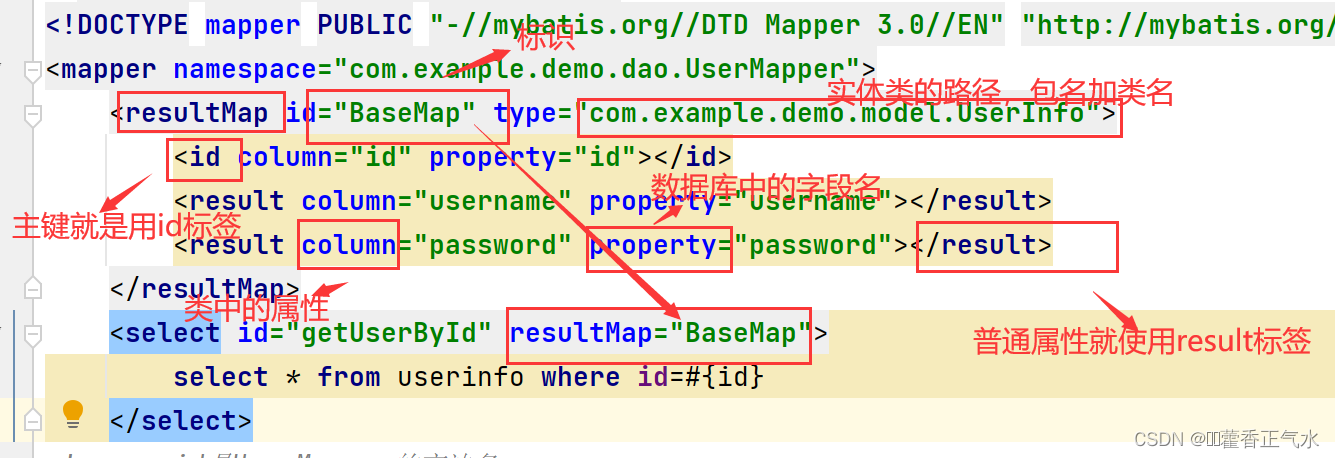
使用MyBatis(2)
目录 一、定义接口、实体类、创建XML文件实现接口) 二、MyBatis的增删改查 🍅1、MyBatis传递参数查询 🎈写法一 🎈写法二 🎈两种方式的区别 🍅2、删除操作 🍅3、根据id修改用户名 &#x…...

【FPGA/D6】
2023年7月25日 VGA控制器 视频23notecodetb 条件编译error时序图保存与读取??RGBTFT显示屏 视频24PPI未分配的引脚或电平的解决方法 VGA控制器 视频23 note MCU单片机 VGA显示实时采集图像 行消隐/行同步/场同步/场消隐 CRT:阴极射线管 640…...
【WebGIS实例】(10)Cesium开场效果(场景、相机旋转,自定义图片底图)
效果 漫游效果视频: 【WebGIS实例】(10)Cesium开场效果(场景、相机 点击鼠标后将停止旋转并正常加载影像底图: 代码 可以直接看代码,注释写得应该比较清楚了: /** Date: 2023-07-28 16:21…...
【Spring】IOC的原理
一、 IOC 的概念 Spring 的 IOC ,即控制反转,所谓控制反转 —— 本来管理业务对象(bean)的操作是由我们程序员去做的,但是有了 Spring 核心容器后,这些 Bean 对象的创建和管理交给我们Spring容器去做了&am…...

AI加速游戏开发 亚马逊云科技适配3大场景,打造下一代游戏体验
随着疫情的消散,中国游戏产业正在快速前进。在伴随着游戏产业升级的同时,整个行业都在面临着新的挑战与新的诉求。亚马逊云科技游戏研发解决方案和服务,覆盖端到端3大场景,为游戏公司与游戏开发人员赋能。 场景1:AI辅助…...
,(派生类,子类))
C++ | 继承(基类,父类,超类),(派生类,子类)
文章参考:https://blog.csdn.net/war1111886/article/details/8609957 一 .继承中的访问权限关系 1.基类,父类,超类是指被继承的类,派生类,子类是指继承于基类的类. 2…...

Commands Of Hadoop
序言 持续整理下常用的命令cuiyaonan2000163.com Command 文件拷贝 当从多个源拷贝时,如果两个源冲突,distcp会停止拷贝并提示出错信息,. 如果在目的位置发生冲突,会根据选项设置解决。 默认情况会跳过已经存在的目标文件&am…...
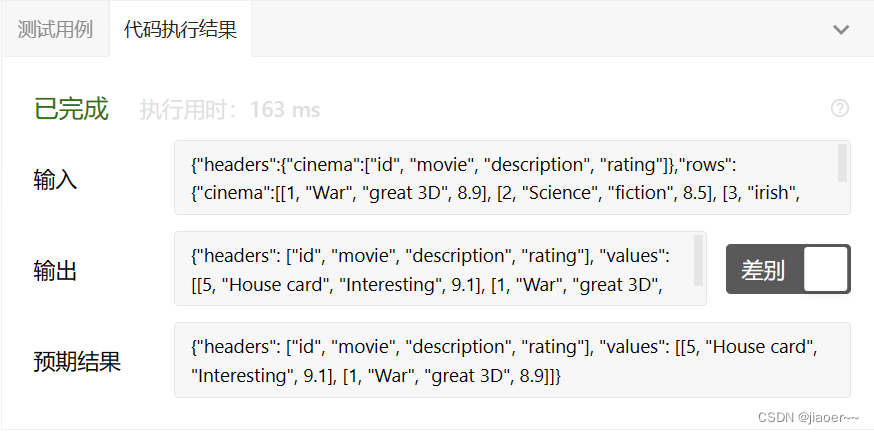
SQL-每日一题【620.有趣的电影】
题目 某城市开了一家新的电影院,吸引了很多人过来看电影。该电影院特别注意用户体验,专门有个 LED显示板做电影推荐,上面公布着影评和相关电影描述。 作为该电影院的信息部主管,您需要编写一个 SQL查询,找出所有影片…...
linux 精华总结
...

Eureka 学习笔记2:客户端 DiscoveryClient
版本 awsVersion ‘1.11.277’ DiscoveryClient # cacheRefreshTask // 配置shouldFetchRegistry if (clientConfig.shouldFetchRegistry()) {// 配置client.refresh.intervalint registryFetchIntervalSeconds clientConfig.getRegistryFetchIntervalSeconds();// 配置expB…...
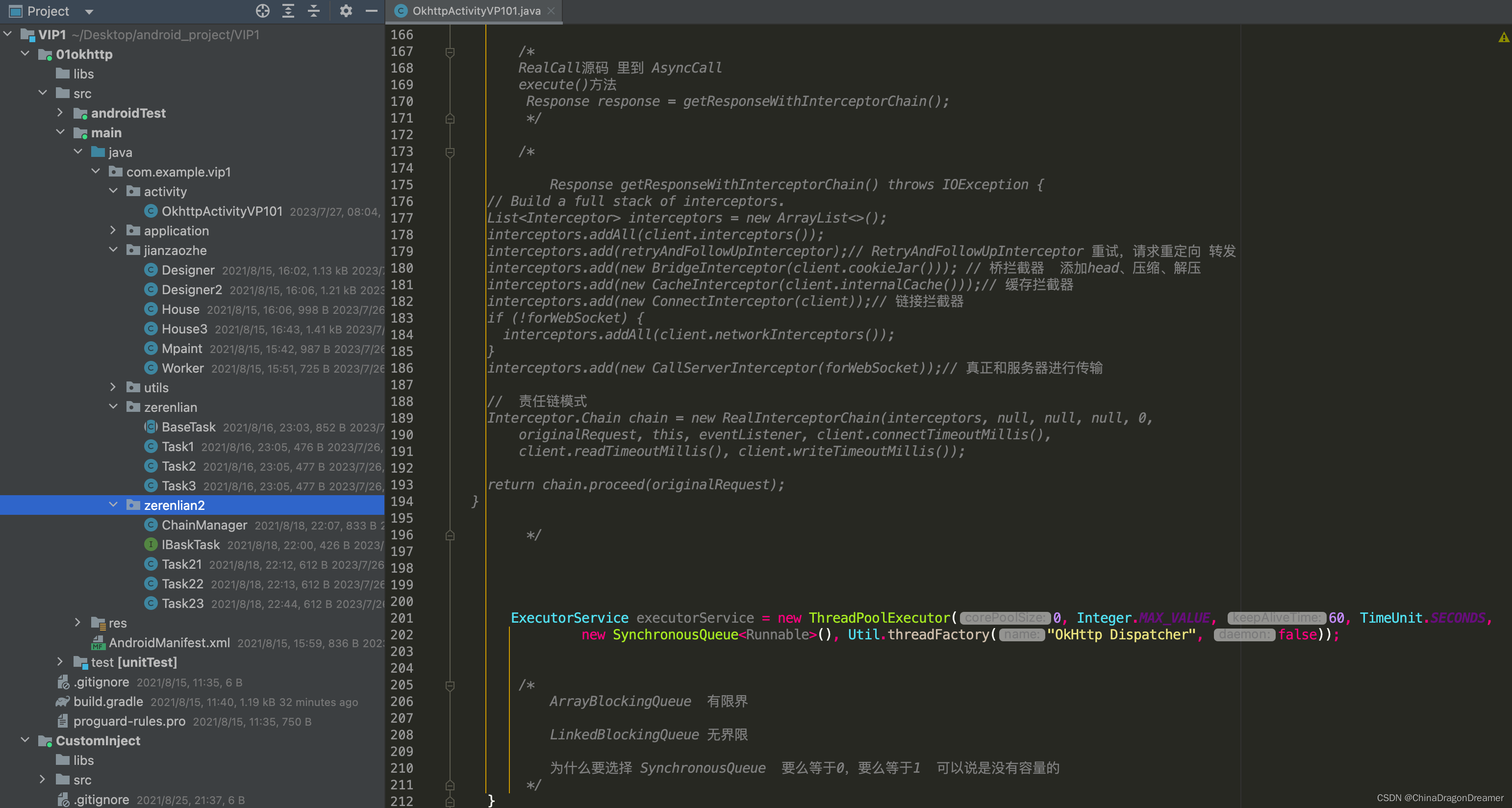
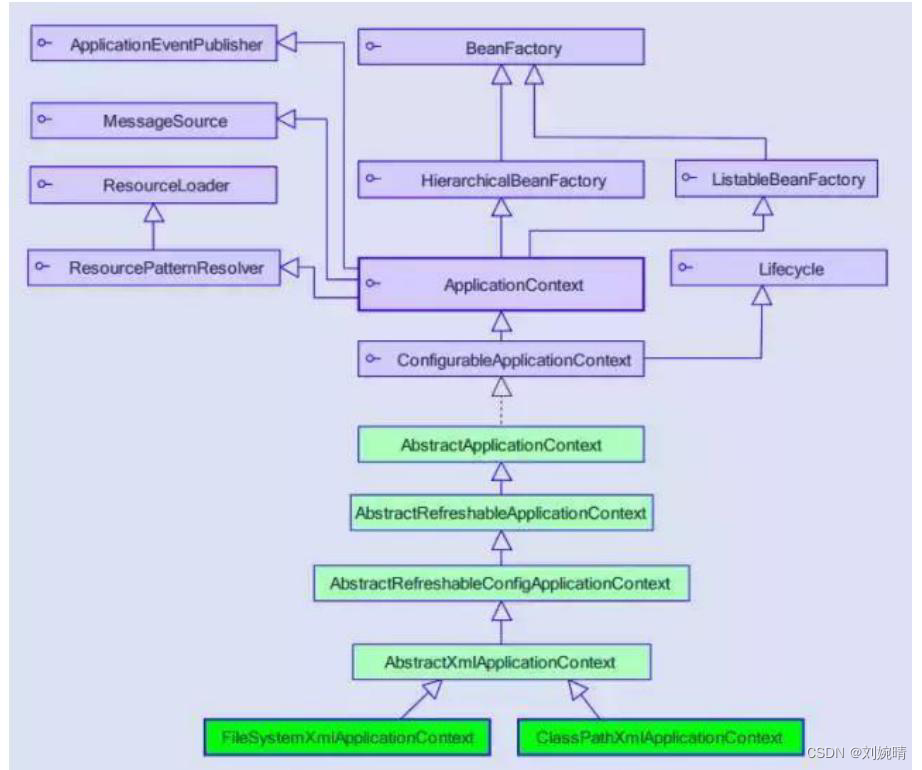
okhttp原理分析
工程目录图 请点击下面工程名称,跳转到代码的仓库页面,将工程 下载下来 Demo Code 里有详细的注释 01okhttp module里 包含的设计模式:建造者设计模式、责任链设计模式 CustomInject 演示自定义注解 代码:okhttp原理分析、Andro…...

清华大学学位论文LaTeX模板:30分钟快速排版终极指南
清华大学学位论文LaTeX模板:30分钟快速排版终极指南 【免费下载链接】thuthesis LaTeX Thesis Template for Tsinghua University 项目地址: https://gitcode.com/gh_mirrors/th/thuthesis 还在为论文格式烦恼吗?清华大学官方LaTeX模板thuthesis让…...

突破本地媒体解码屏障:QQ影音 4K/H.265 硬件加速优化与 DLL 运行库环境修复
突破本地媒体解码屏障:QQ影音 4K/H.265 硬件加速优化与 DLL 运行库环境修复 在日常开发和技术写作中,我们经常需要处理本地音视频文件,或者截取一段高质量的 GIF 动图作为 GitHub PR、CSDN 博客的演示说明。 虽然目前市面上有 PotPlayer、V…...

Windows HEIC缩略图解决方案:让iPhone照片在资源管理器中重获新生
Windows HEIC缩略图解决方案:让iPhone照片在资源管理器中重获新生 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC/HEIF files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails 想…...

3个关键步骤:从零开始使用AlphaFold 3进行蛋白质结构预测
3个关键步骤:从零开始使用AlphaFold 3进行蛋白质结构预测 【免费下载链接】alphafold3 AlphaFold 3 inference pipeline. 项目地址: https://gitcode.com/gh_mirrors/alp/alphafold3 AlphaFold 3是DeepMind开发的最新蛋白质结构预测工具,它不仅能…...

实战指南:Happy Island Designer 的深度应用与优化
实战指南:Happy Island Designer 的深度应用与优化 【免费下载链接】HappyIslandDesigner "Happy Island Designer (Alpha)",是一个在线工具,它允许用户设计和定制自己的岛屿。这个工具是受游戏《动物森友会》(Animal Crossing)启发…...

3分钟掌握PUBG罗技鼠标宏:新手也能轻松压枪的完整指南
3分钟掌握PUBG罗技鼠标宏:新手也能轻松压枪的完整指南 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 还在为《绝地求生》中难以控制…...

VMware Workstation Pro 17许可证密钥:技术深度解析与最佳实践指南
VMware Workstation Pro 17许可证密钥:技术深度解析与最佳实践指南 【免费下载链接】VMware-Workstation-Pro-17-Licence-Keys Free VMware Workstation Pro 17 full license keys. Weve meticulously organized thousands of keys, catering to all major versions…...
)
DeepSeek代码解释能力突袭测评(企业级代码理解天花板大起底)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek代码解释能力突袭测评(企业级代码理解天花板大起底) DeepSeek-R1 在代码理解任务中展现出远超通用大模型的专项能力,尤其在跨语言语义对齐、上下文敏感逻辑还…...
Transformer解码器在量子纠错中的应用:突破表面码实时解码瓶颈
1. 项目概述与核心挑战 量子计算这行干久了,你总会遇到一个绕不开的“拦路虎”:量子纠错。这玩意儿是通往实用化、容错量子计算机的必经之路,但其中的解码问题,尤其是针对表面码这类稳定子码的解码,其复杂度和实时性要…...

AssetRipper深度解析:Unity资源静态解析原理与工程化实践
1. 这不是“破解工具”,而是Unity开发者自己的资源归档方案AssetRipper这个名字,对很多刚接触Unity反编译的开发者来说,第一反应是“哦,那个能扒出美术资源的软件”。但如果你真这么用它,大概率会在三天内遇到贴图全黑…...