多旋翼物流无人机节能轨迹规划(Python代码实现)
目录
💥1 概述
📚2 运行结果
🌈3 Python代码实现
🎉4 参考文献

💥1 概述
多旋翼物流无人机的节能轨迹规划是一项重要的技术,可以有效减少无人机的能量消耗,延长飞行时间,提高物流效率。下面是一些常见的节能轨迹规划方法:
-
最短路径规划:通过寻找起点和终点之间的最短路径,减少飞行距离,从而节省能量消耗。可以使用经典的最短路径算法如Dijkstra算法和A*算法来实现。
-
动态路径规划:考虑当前环境的动态变化,比如风速、天气状况和地形高度等因素,并实时优化飞行路径。这样可以避免飞行过程中遭受很大的阻力,从而减少能量消耗。
-
高效充电站布置:合理规划充电站的位置,使得无人机在物流任务执行过程中可以方便地进行补充能量。这样无人机可以减少回程飞行距离,节省能量。
-
光伏充电:在无人机上安装太阳能电池板,通过太阳能充电来提供能源。这种方式可以减少对传统电力的依赖,减少碳排放。
-
多机协同飞行:通过与其他物流无人机进行协同飞行,在空中形成集群,减少空气阻力,提高整体能源利用效率。
总之,节能轨迹规划为多旋翼物流无人机提供了较大的优化空间,通过合理规划飞行路径、优化充电策略以及使用新能源技术,可以显著减少能量消耗,提高物流效率。
本文考虑静态环境下无人机轨迹轨迹的可行性和能耗特性。
📚2 运行结果
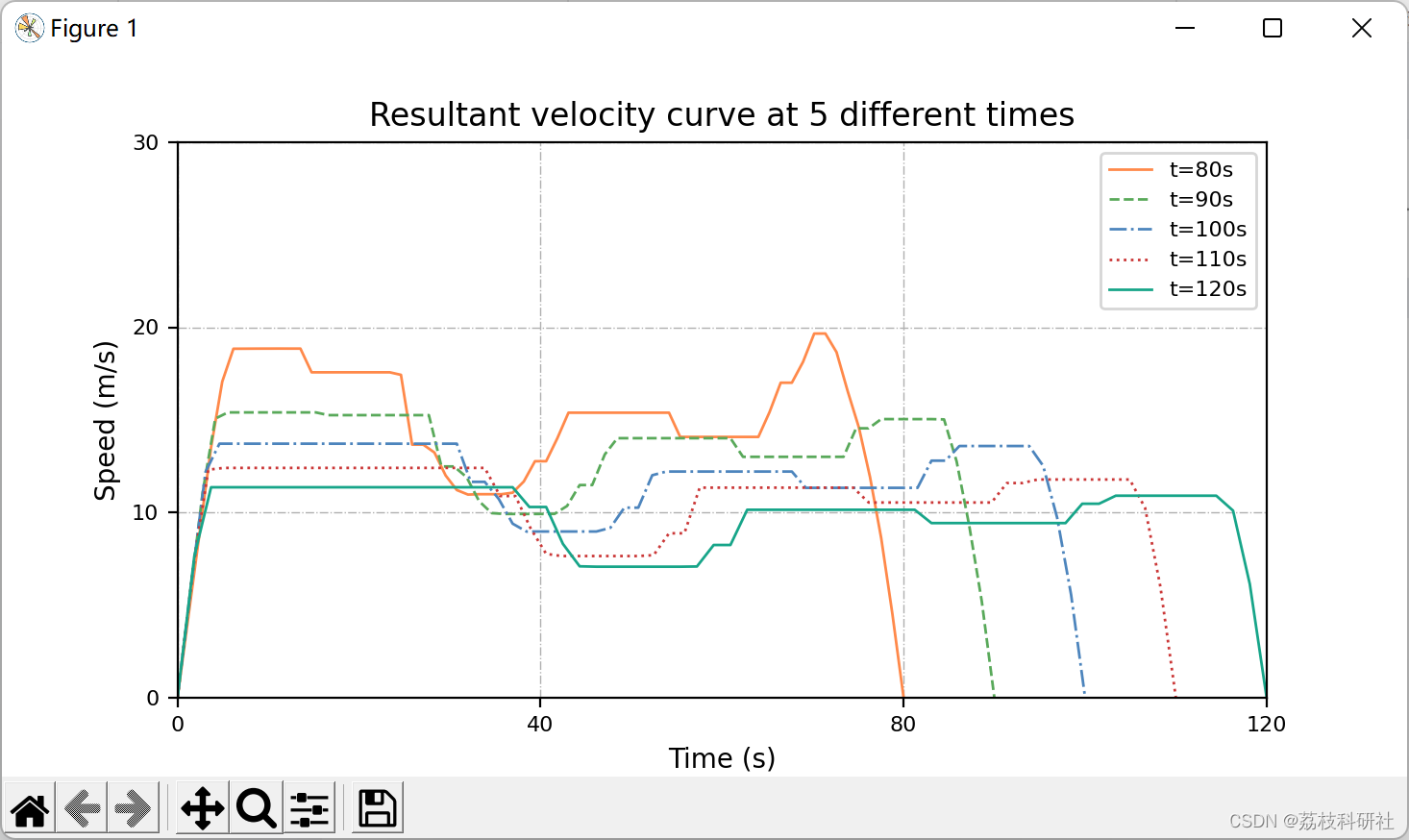
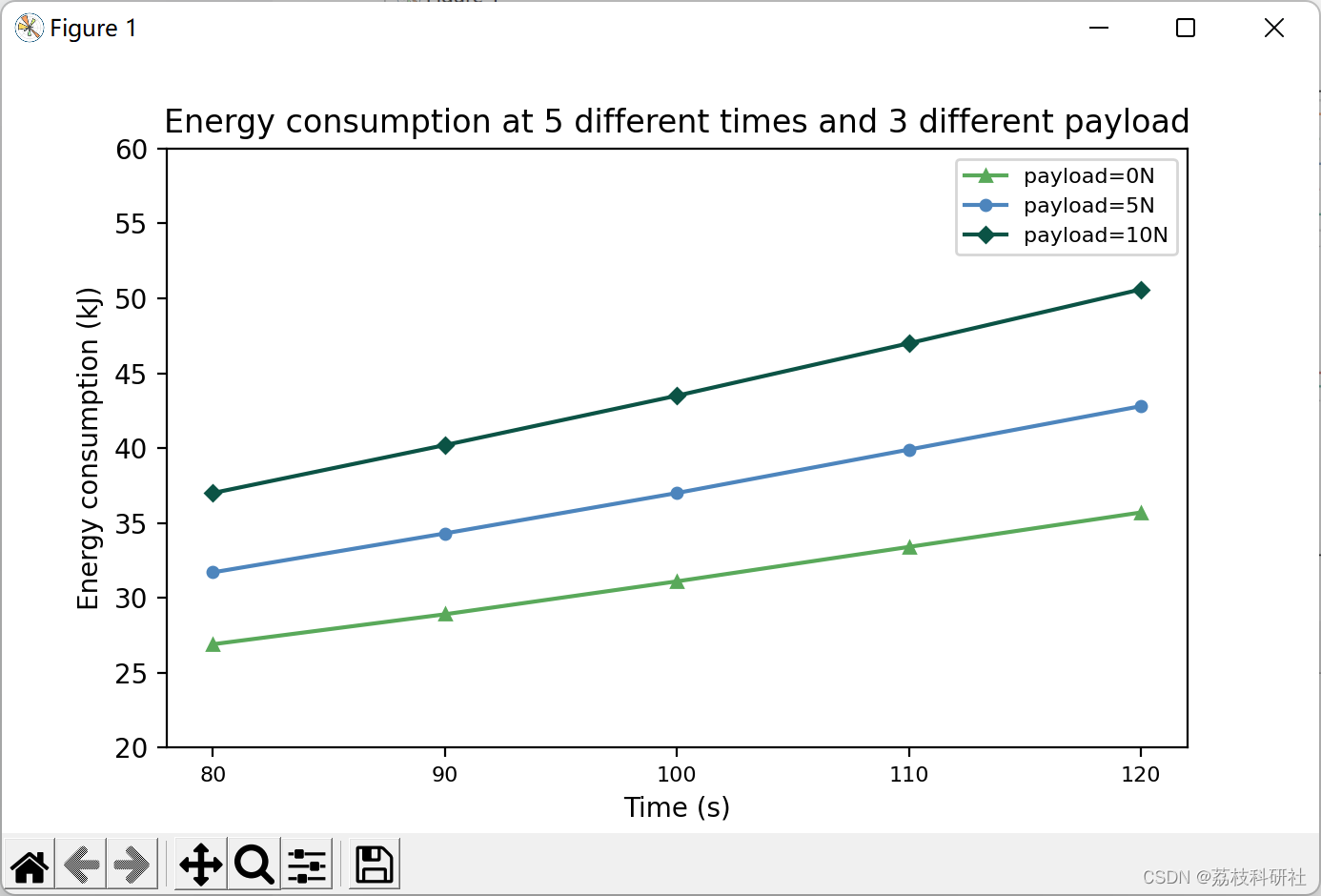
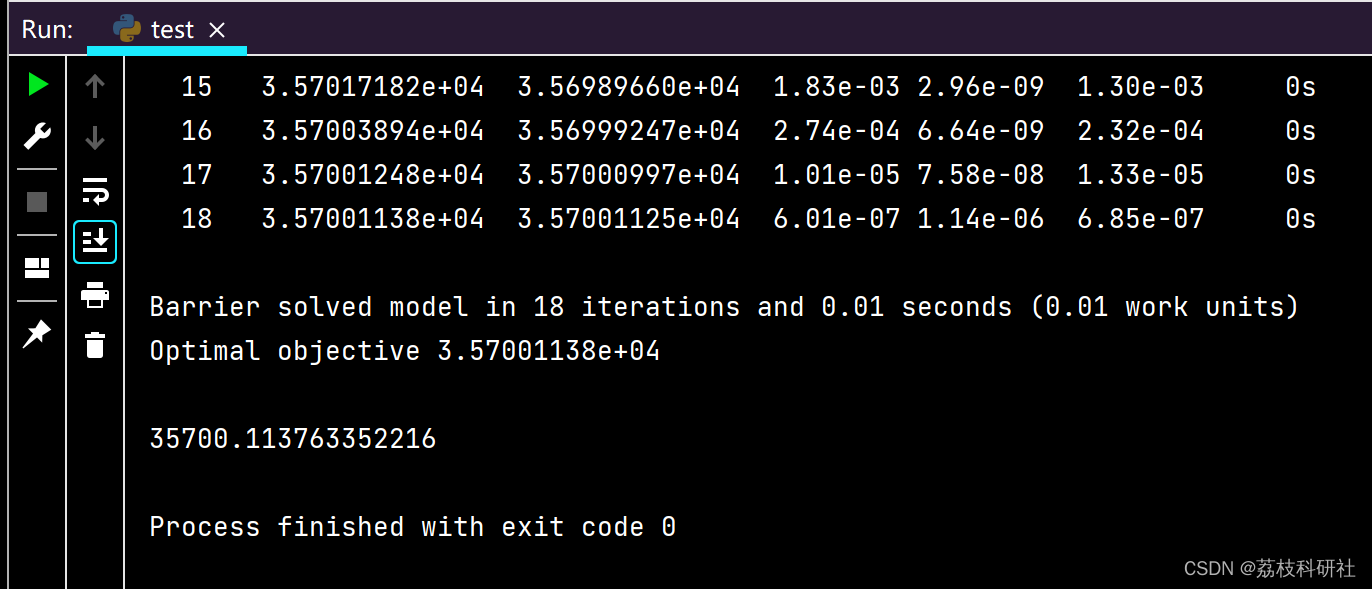
部分代码:
def VelDataAboutTime():blocks = []b1 = Block(0, 0, 0, 150, 200, 200) # (x1, y1, z1, x2, y2, z2)b2 = Block(100, 150, 120, 300, 400, 450) # (x1, y1, z1, x2, y2, z2)b3 = Block(250, 350, 400, 500, 480, 500) # (x1, y1, z1, x2, y2, z2)b4 = Block(420, 220, 200, 650, 400, 450) # (x1, y1, z1, x2, y2, z2)b5 = Block(550, 80, 150, 650, 400, 300) # (x1, y1, z1, x2, y2, z2)b6 = Block(600, 80, 50, 800, 150, 200) # (x1, y1, z1, x2, y2, z2)blocks.append(b1)blocks.append(b2)blocks.append(b3)blocks.append(b4)blocks.append(b5)blocks.append(b6)block2Ds = []for b in blocks:block2Ds.append(Block2D(b.x1, b.y1, b.x2, b.y2))goal = [800, 100, 60]c_x = [] # 每段 (x1, x2)c_y = [] # 每段 (y1, y2)c_z = [] # 每段 (z1, z2)corridor = []for block in blocks:c_x.append([block.x1, block.x2]) # 提取出每一段的 (x1,x2)c_y.append([block.y1, block.y2]) # 提取出每一段的 (y1,y2)c_z.append([block.z1, block.z2]) # 提取出每一段的 (z1,z2)corridor.append(c_x)corridor.append(c_y)corridor.append(c_z)time = [[13, 21, 9, 12, 12, 13],[16, 23, 10, 13, 13, 15],[18, 25, 11, 15, 15, 16],[20, 27, 13, 16, 16, 18],[22, 29, 14, 18, 18, 19]]# time = [13, 21, 9, 12, 12, 13] # 80 2.68677585e+04# time = [16, 23, 10, 13, 13, 15] # 90 2.88795396e+04# time = [18, 25, 11, 15, 15, 16] # 100 3.10684295e+04# time = [20, 27, 13, 16, 16, 18] # 110 3.33565508e+04# time = [22, 29, 14, 18, 18, 19] # 120 3.57001138e+04for i in range(5):print("============================================")energy, power, s, vel = UAV3D(time[i], goal, corridor)print(energy)""" save vel to excel """vel_x = list(np.array(vel[0]).flatten())vel_y = list(np.array(vel[1]).flatten())vel_z = list(np.array(vel[2]).flatten())for index in range(len(vel_x)):velocity = math.sqrt(vel_x[index] ** 2 + vel_y[index] ** 2 + vel_z[index] ** 2)CVXsheet.write(index, i, velocity)workbook.save('Velocity.xls')def plot_blocks(blocks):plt.figure(1)ax = plt.axes(projection='3d')ax.set_xlabel('X(m)')ax.set_ylabel('Y(m)')ax.set_zlabel('Z(m)')# ax.set_xticks(np.linspace(0, 100, 4))# ax.set_yticks(np.linspace(0, 100, 4))# ax.set_zticks(np.linspace(0, 100, 4))ax.set_xlim(0, 1000)ax.set_ylim(0, 1000)
🌈3 Python代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Wu Kunpeng (2022) Energy-Efficient Trajectory Planning for Multi-rotor Logistics UAVs
相关文章:
多旋翼物流无人机节能轨迹规划(Python代码实现)
目录 💥1 概述 📚2 运行结果 🌈3 Python代码实现 🎉4 参考文献 💥1 概述 多旋翼物流无人机的节能轨迹规划是一项重要的技术,可以有效减少无人机的能量消耗,延长飞行时间,提高物流效率…...

Vue通过指令 命令将打包好的dist静态文件上传到腾讯云存储桶 (保存原有存储目录结构)
1、在项目根目录创建uploadToCOS.js文件 (建议起简单的名字 方便以后上传输入命令方便) 2、uploadToCOS.js文件代码编写 const path require(path); const fs require(fs); const COS require(cos-nodejs-sdk-v5);// 配置腾讯云COS参数 const cos n…...

Linux 新硬盘分区,挂载
在Linux系统中,当你插入新的硬盘时,你需要进行一些步骤来使系统识别并使用它。以下是一些常见的步骤: 确保硬盘已正确连接到计算机。检查硬盘的电源和数据线是否牢固连接。 打开终端或命令行界面。 运行以下命令来扫描新硬盘: s…...
Stable Diffusion 开源模型 SDXL 1.0 发布
关于 SDXL 模型,之前写过两篇: Stable Diffusion即将发布全新版本Stable Diffusion XL 带来哪些新东西? 一晃四个月的时间过去了,Stability AI 团队终于发布了 SDXL 1.0。当然在这中间发布过几个中间版本,分别是 SDXL …...

NoSQL--------- Redis配置与优化
目录 一、关系型数据库与非关系型数据库 1.1关系型数据库 1.2非关系型数据库Nosql 1.3关系与非关系区别 1.4非关系产生的背景 1.5总结 二、Redis介绍 2.1Redis简介 2.3Redis优点 2.4 Redis为什么这么快? 三、Redis安装部署 3.1安装redis 3.2测试redis 3.3r…...

Ubuntu中关闭防火墙
在Ubuntu中关闭防火墙可以通过以下步骤进行: 查看防火墙状态: sudo ufw status如果防火墙状态为active(活动状态),则执行以下命令来停用防火墙: sudo ufw disable输入以下命令确认是否停用防火墙&#x…...

java-马踏棋盘
在8x8的国际棋盘上,按照马走日的规则,验证是否能够走遍棋盘。 1、创建棋盘 chessBoard,是一个二维数组。 2、将当前位置设置为已经访问,然后根据当前位置,计算马儿还能走哪些位置,并放入到一个集合中&…...
系统架构设计师-软件架构设计(4)
目录 一、软件架构评估 1、敏感点 2、权衡点 3、风险点 4、非风险点 5、架构评估方法 5.1 基于调查问卷或检查表的方式 5.2 基于度量的方式 5.3 基于场景的方式 6、基于场景的评估方法 6.1 软件架构分析法(SAAM) 6.2 架构权衡分析法(ATAM&am…...
51单片机--AD/DA
AD/DA介绍 AD和DA是模拟信号和数字信号之间的转换过程。 AD,全称为模拟到数字(Analog-to-Digital),指的是将模拟信号转换为数字信号的过程。在AD转换中,模拟信号经过采样、量化和编码等步骤,被转换为离散的…...
网络安全-防御需知
目录 网络安全-防御 1.网络安全常识及术语 资产 漏洞 0day 1day 后门 exploit APT 2.什么会出现网络安全问题? 网络环境的开放性 协议栈自身的脆弱性 操作系统自身的漏洞 人为原因 客观原因 硬件原因 缓冲区溢出攻击 缓冲区溢出攻击原理 其他攻击…...
C#百万数据处理
C#百万数据处理 在我们经验的不断增长中不可避免的会遇到一些数据量很大操作也复杂的业务 这种情况我们如何取优化如何去处理呢?一般都要根据业务逻辑和背景去进行合理的改进。 文章目录 C#百万数据处理前言一、项目业务需求和开发背景项目开发背景数据量计算业务需…...

windows端口占用
1.查看当前端口被哪个进程占用了(进入到CMD中) netstat -ano|findstr "8990"输出结果为: TCP 127.0.0.1:8990 0.0.0.0:0 LISTENING 2700 我们发现8990端口被2700进程占用了 2.基于进程号找进程名称 tasklist|findstr "2700&qu…...
如何理解Diffusion
Diffusion算法可以有多个角度进行理解,不同的理解方式只是对目标函数进行了不同的解释。其主体思想是不变的,可以归纳为: 训练时通过图片逐步添加噪声,变为一个纯噪声。然后学习每一步的噪声。推理时给定一个随机噪声图片&#x…...
-[聊天模型(Chat Models):使用少量示例和响应流式传输])
自然语言处理从入门到应用——LangChain:模型(Models)-[聊天模型(Chat Models):使用少量示例和响应流式传输]
分类目录:《自然语言处理从入门到应用》总目录 使用少量示例 本部分的内容介绍了如何在聊天模型(Chat Models)中使用少量示例。关于如何最好地进行少量示例提示尚未形成明确的共识。因此,我们尚未固定任何关于此的抽象概念&#…...
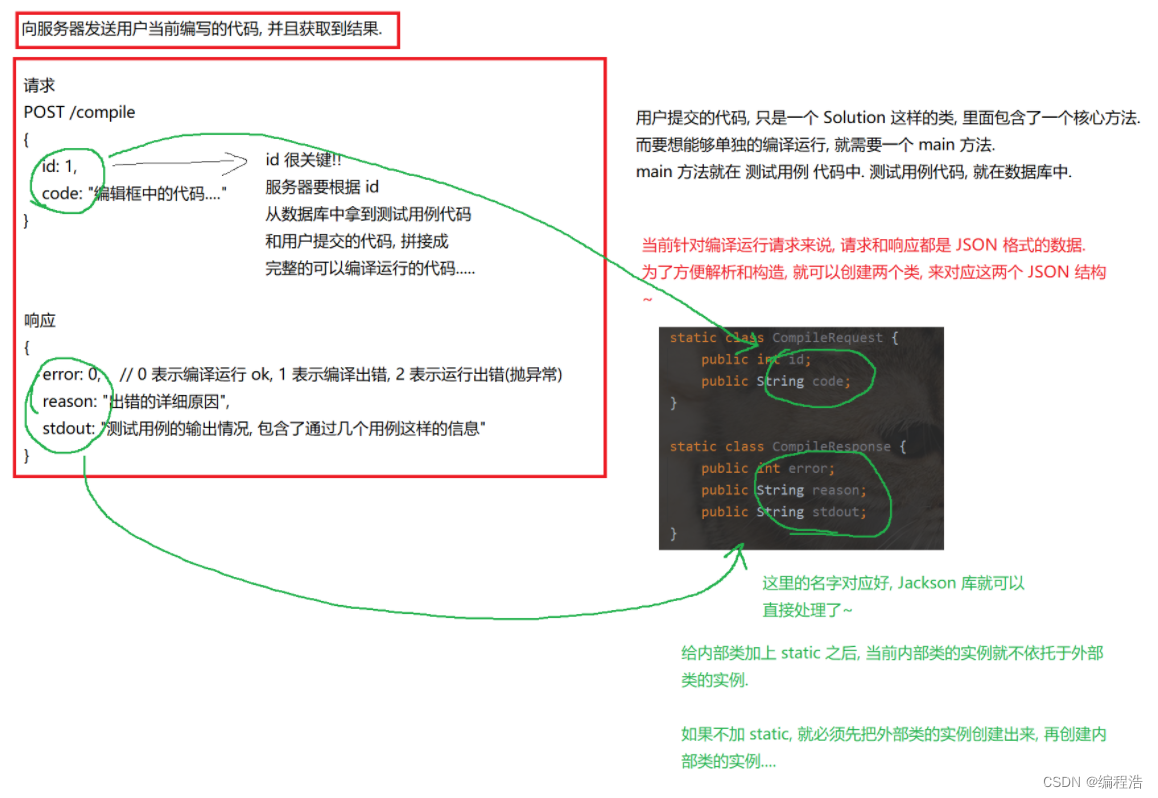
Java在线OJ项目(三)、前后端交互API模块
Java在线OJ项目(三)、前后端交互API模块 1. 客户端向服务器请求所有题目 或者 单个题目前端获取所有题目获取一个题目 后端 2. 后端读取前端提交的代码,进行编译运行,返回结果前端提交代码后端处理 1. 客户端向服务器请求所有题目…...

项目——负载均衡在线OJ
目录 项目介绍开发环境所用技术项目宏观结构编写思路1. 编写compile_server1.1 编译模块编写1.2 运行功能1.3compile_runner 编译与运行1.4 编写compile_server.cpp调用compile_run模块,形成网络服务 2. 编写基于MVC的oj_server2.1 oj_server.cpp的编写2.2 oj_model…...

idea连接远程服务器上传war包文件
idea连接远程服务器&上传war包 文章目录 idea连接远程服务器&上传war包1. 连接服务器2.上传war包 1. 连接服务器 选择Tools -> Start SSH Session 添加配置 连接成功 2.上传war包 Tools -> Deployment -> Browse Remote Host 点击右侧标签,点击&…...
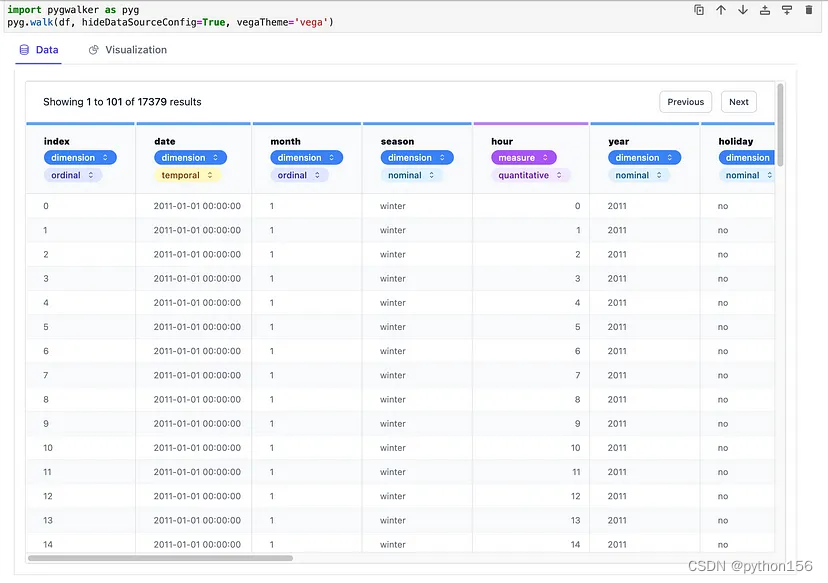
使用PyGWalker可视化分析表格型数据
大家好,可以想象一下在Jupyter Notebook中拥有大量数据,想要对其进行分析和可视化。PyGWalker就像一个神奇的工具,能让这项工作变得超级简单。它能获取用户的数据,并将其转化为一种特殊的表格,可以与之交互,…...

Visual C++中的虚函数和纯虚函数(以外观设计模式为例)
我是荔园微风,作为一名在IT界整整25年的老兵,今天来说说Visual C中的虚函数和纯虚函数。该系列帖子全部使用我本人自创的对比学习法。也就是当C学不下去的时候,就用JAVA实现同样的代码,然后再用对比的方法把C学会。 直接说虚函数…...

电子元器件选型与实战应用—01 电阻选型
大家好, 我是记得诚。 这是《电子元器件选型与实战应用》专栏的第一篇文章,今天的主角是电阻,在每一个电子产品中,都少不了电阻的身影,其重要性不言而喻。 文章目录 1. 入门知识1.1 基础1.2 常用品牌1.3 电阻的种类2. 贴片电阻标识2.1 三位数标注法2.2 四位数标注法2.3 小…...

OpCore-Simplify:如何将黑苹果EFI配置从3小时缩短到15分钟?
OpCore-Simplify:如何将黑苹果EFI配置从3小时缩短到15分钟? 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 在开源系统定制领域…...

CLIP-GmP-ViT-L-14算力适配:自动检测CUDA版本并加载对应优化内核
CLIP-GmP-ViT-L-14算力适配:自动检测CUDA版本并加载对应优化内核 1. 引言:当高性能模型遇见复杂环境 如果你部署过AI模型,大概率遇到过这样的场景:好不容易把模型跑起来了,却发现速度慢得让人抓狂,或者干…...

从LFA到TI-LFA:一张图看懂华为IGP FRR技术演进与选型指南
从LFA到TI-LFA:华为IGP FRR技术全景解析与实战选型 当视频会议因网络抖动出现卡顿时,当金融交易因路由收敛延迟导致订单丢失时,网络工程师们开始意识到:传统的IGP收敛机制已无法满足现代业务对可靠性的苛刻要求。这背后是毫秒级故…...

如何为Whisper ASR Webservice开发自定义引擎和插件
如何为Whisper ASR Webservice开发自定义引擎和插件 【免费下载链接】whisper-asr-webservice OpenAI Whisper ASR Webservice API 项目地址: https://gitcode.com/gh_mirrors/wh/whisper-asr-webservice Whisper ASR Webservice是一个基于OpenAI Whisper的语音识别服务…...

Claude Code 源码泄露深度剖析,Anthropic AI 编程助手的架构全解密
2026年3月31日,整个AI开发圈被一条消息炸开了锅。安全研究员Chaofan Shou(推特账号Fried_rice)在Anthropic官方发布的npm包中,意外发现了一个暴露的.map文件,正是这个看似不起眼的文件,直接泄露了Claude Co…...

终极指南:3步用VR-Reversal将3D视频转为2D,普通设备也能自由探索VR世界
终极指南:3步用VR-Reversal将3D视频转为2D,普通设备也能自由探索VR世界 【免费下载链接】VR-reversal VR-Reversal - Player for conversion of 3D video to 2D with optional saving of head tracking data and rendering out of 2D copies. 项目地址…...

AWCII 040 CPU模块
AWCII 040 CPU 模块AWCII 040 是工业自动化控制系统中的中央处理单元(CPU 模块),主要用于执行控制程序、数据运算及系统管理,是整个控制系统的核心“大脑”。一、基本概述AWCII 040 CPU 模块集成了处理器、存储单元及系统管理功能…...

Go开发工具终极对决:GoLand与VSCode深度评测与实战指南
1. Go开发工具的选择困境 刚接触Go语言那会儿,我像大多数新手一样纠结:到底该用哪个开发工具?市面上主流的GoLand和VSCode各有拥趸,论坛里的讨论经常演变成"编辑器党"和"IDE党"的论战。经过三年多的实战&…...
)
Flutter项目打包未签名ipa的保姆级教程(含Xcode配置与常见错误解决)
Flutter项目打包未签名ipa的保姆级教程(含Xcode配置与常见错误解决) 当你完成了一个Flutter应用的开发,准备将其交付给第三方进行签名或部署到CI/CD流水线时,生成一个未签名的ipa文件是必经之路。对于刚接触iOS打包的Flutter开发者…...

动态间隙精准诊断:NHJX-13 型底盘间隙仪机动车底盘安全检测全方案
动态间隙精准诊断:NHJX-13 型底盘间隙仪机动车底盘安全检测全方案在机动车安全环保检测体系中,底盘间隙仪是诊断车辆转向机构、悬挂系统、传动部件间隙状况的核心设备,尤其对大中型客车、重中型货车等营运车辆,其性能直接决定底盘…...