状态机实现N位按键消抖
状态机实现N位按键消抖
1、原理
利用状态机实现按键的消抖,具体的原理可参考
(50条消息) 基于FPGA的按键消抖_fpga 按键消抖_辣子鸡味的橘子的博客-CSDN博客
状态机简介:
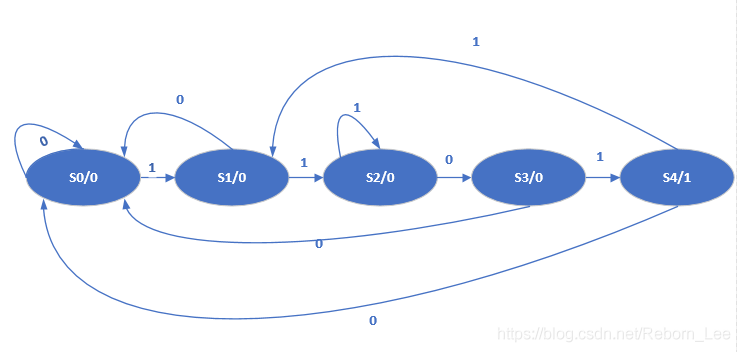
状态机分类可以主要分为两类:moore和mealy
根据三段式状态机最后一段的组合逻辑,根据状态机的输出是否与输出条件有关可以用来区分moore状态机和mealy状态机
若输出只与当前状态机有关,则为moore状态机
always @*beginif(current_state == s4) dout = 1;else dout = 0;endMoore状态机仅仅和当前状态有关
Mealy状态机:输出不仅取决于当前状态,还和输入有关;
同样是三段式描述,最后的输出为:
always @(*)beginif(reset) dout = 1'b0;else if( (current_state == s3)&&(din == 1'b1) ) dout = 1'b1;else dout = 1'b0;end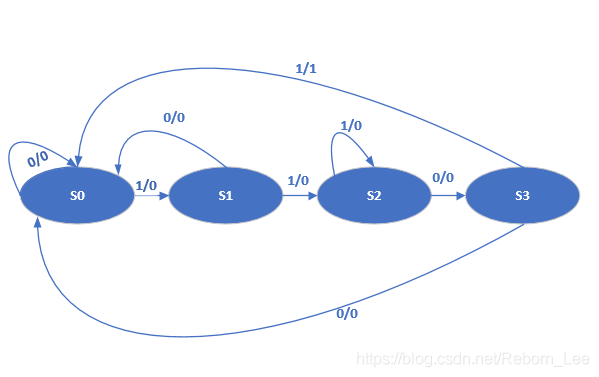
可见,输出不仅和当前状态和输入都有关系。
最后,Moore状态机和Mealy状态机可以相互转换。上述两个状态转移图实际上实现的是同一个功能,就是检测序列1101.
状态机按照段式分类,可分为:一段式、二段式、三段式
可参考:
(50条消息) 状态机详解(一段式、二段式、三段式)_状态机一段式二段式三段式_CuteBaBaKiller的博客-CSDN博客
2、代码
module fsm_key_n#(parameter N = 4,parameter TIME_20MS = 1000_000)(input wire clk,input wire rst_n,input wire[N-1:0] key_in,output wire[N-1:0] key_out
);
reg[3:0] key_out_r;//中间信号
reg[24:0] cnt_20ms;//20ms计数器
//状态空间
parameter IDLE = 4'b0001,FILTER_DOWN = 4'b0010,DOWN = 4'b0100,FILTER_UP = 4'b1000;reg[3:0] cstate;//现态
reg[3:0] nstate;//次态
reg[N-1:0] key_r0,key_r1,key_r2;//按键延时
reg flag;//检测下降沿和上升沿,寄存
//****************************************************************
//--状态转移条件定义
//****************************************************************
wire idle2filter_down;
wire filter_down2down;
wire down2filter_up;
wire filter_up2idle;
//****************************************************************
//--"计时开始结束条件
//****************************************************************
wire add_cnt_20ms;
wire end_cnt_20ms;//****************************************************************
//--下降沿上升沿检测
//****************************************************************
assign nedge = |(~key_r1&key_r2);
assign podge = |(key_r1&key_r2);
//****************************************************************
//--状态转移条件约束
//****************************************************************
assign idle2filter_down = nedge && cstate == IDLE;
assign filter_down2down = end_cnt_20ms && cstate == FILTER_DOWN;
assign down2filter_up = podge && cstate == DOWN;
assign filter_up2idle = end_cnt_20ms && cstate == FILTER_UP;//****************************************************************
//--"信号延时
//****************************************************************
always @(posedge clk or negedge rst_n) beginif(~rst_n)beginkey_r0 <= {N{1'b1}};key_r1 <= {N{1'b1}};key_r2 <= {N{1'b1}};endelse beginkey_r0<=key_in;key_r1<=key_r0;key_r2<=key_r1;end
end//****************************************************************
//--"flag信号约束
//****************************************************************
always @(posedge clk or negedge rst_n) beginif(~rst_n)beginflag<=1'b0;endelse if(nedge || podge)beginflag<=1;endelse if(end_cnt_20ms)beginflag<=0;endelse beginflag<=flag;end
end
//****************************************************************
//--"20ms计数
//****************************************************************
always @(posedge clk or negedge rst_n) beginif(~rst_n) begincnt_20ms<='d0;endelse if(add_cnt_20ms)beginif(end_cnt_20ms)begincnt_20ms <='d0;endelse if(nedge)begincnt_20ms <= 0;endelse begincnt_20ms <= cnt_20ms + 1'b1;endendelse begincnt_20ms<=cnt_20ms;end
end
//****************************************************************
//--"20ms计数条件约束
//****************************************************************
assign add_cnt_20ms = flag;
assign end_cnt_20ms = add_cnt_20ms && cnt_20ms == TIME_20MS - 1;//****************************************************************
//--"三段式状态机,第一段,时序逻辑
//****************************************************************
always @(posedge clk or negedge rst_n) beginif(!rst_n)begincstate<=IDLE;//初始当前状态为空闲endelse begincstate<=nstate;//次态赋值给现态end
end//****************************************************************
//--"三段式状态机,第二段,组合逻辑,状态转移
//****************************************************************
always @(*) begincase(cstate)IDLE:beginif(idle2filter_down)beginnstate = FILTER_DOWN;endelse beginnstate = cstate;endendFILTER_DOWN:beginif(filter_down2down)beginnstate = DOWN; endelse beginnstate = cstate; end endDOWN:beginif(down2filter_up)beginnstate = FILTER_UP; endelse beginnstate = cstate; endendFILTER_UP:beginif(filter_up2idle)beginnstate = IDLE; endelse beginnstate = cstate; endenddefault:nstate = cstate;endcase
end//****************************************************************
//--"有限状态机,第三段,时序逻辑
//****************************************************************
always @(posedge clk or negedge rst_n) beginif(~rst_n) beginkey_out_r<={N{1'b0}};endelse if(filter_down2down)beginkey_out_r<=~key_r1;endelse beginkey_out_r<={N{1'b0}};end
end
assign key_out = key_out_r;endmodule
3、仿真代码
`timescale 1ns/1ns
module fsm_key_tb();reg clk;
reg rst_n;
reg[3:0] key;
reg[3:0] delay;wire[3:0] key_r;
parameter SYS_CLK = 20;
parameter TIME_20MS = 10;
parameter N = 4;
always #(SYS_CLK/2) clk = ~clk;task task_init;beginclk=1'b0;rst_n=1'b0;#(2*SYS_CLK);rst_n=1'b1;key = 4'b1111;#(2*SYS_CLK);end
endtasktask task_key;input[3:0] key_in;output[3:0] key_out;beginkey_out[0] = ~key_in[0];key_out[2] = ~key_in[2];key_out[3] = key_in[3];key_out[1] = key_in[1];end
endtaskinitial begintask_init();repeat(10)beginrepeat (20) begintask_key(key,key);// key[0] = ~key[0];// key[2] = ~key[2];delay = {$random()}%4;#(SYS_CLK*delay);endtask_key(key,key);// key[0] = ~key[0];// key[2] = ~key[2];//wait(inst_fsm_key.end_cnt_20ms);#(30*SYS_CLK);end$stop;
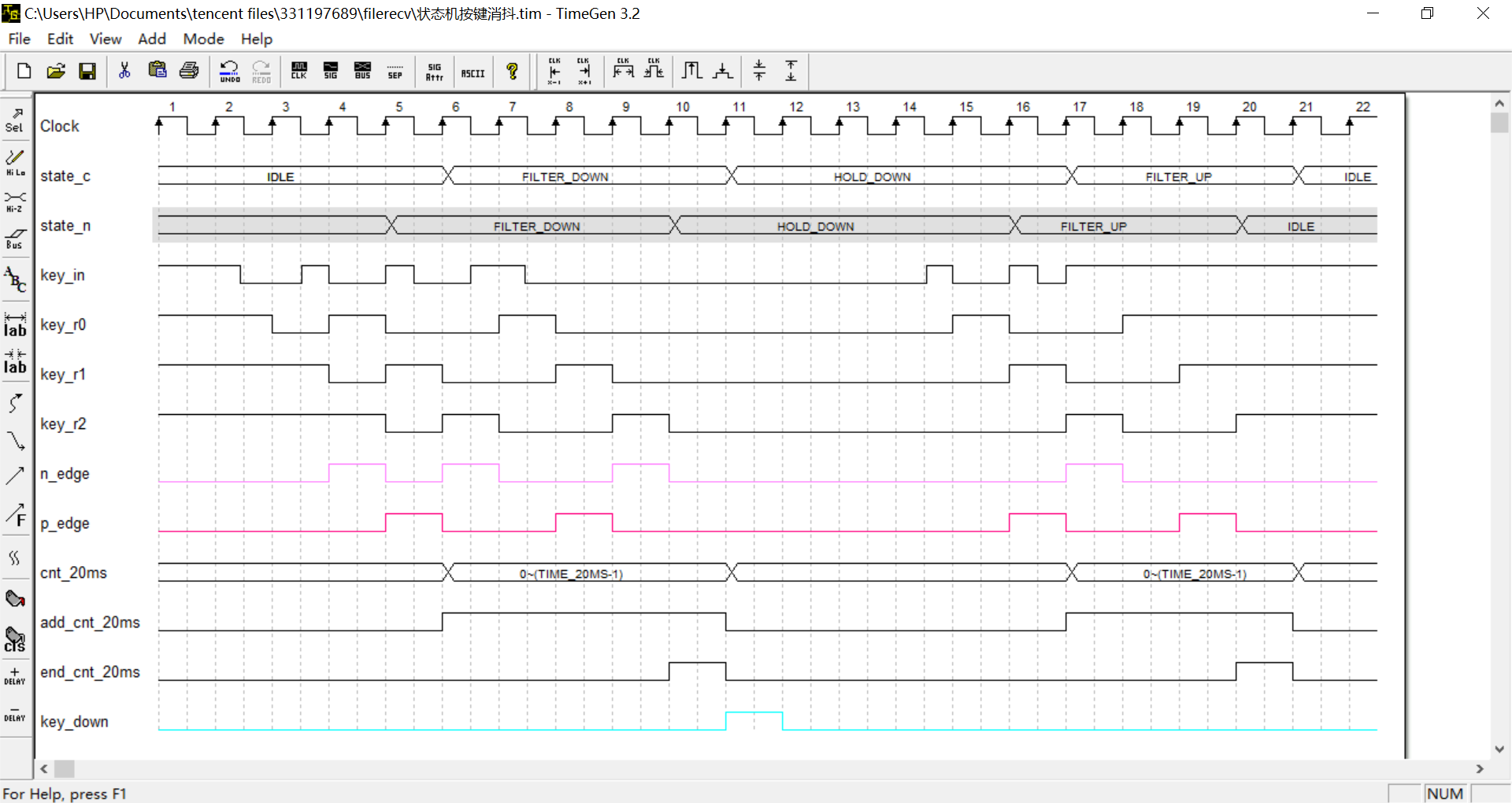
endfsm_key_n #(.N(N),.TIME_20MS(TIME_20MS)) inst_fsm_key (.clk (clk),.rst_n (rst_n),.key_in (key),.key_out (key_r));endmodule4、仿真结果
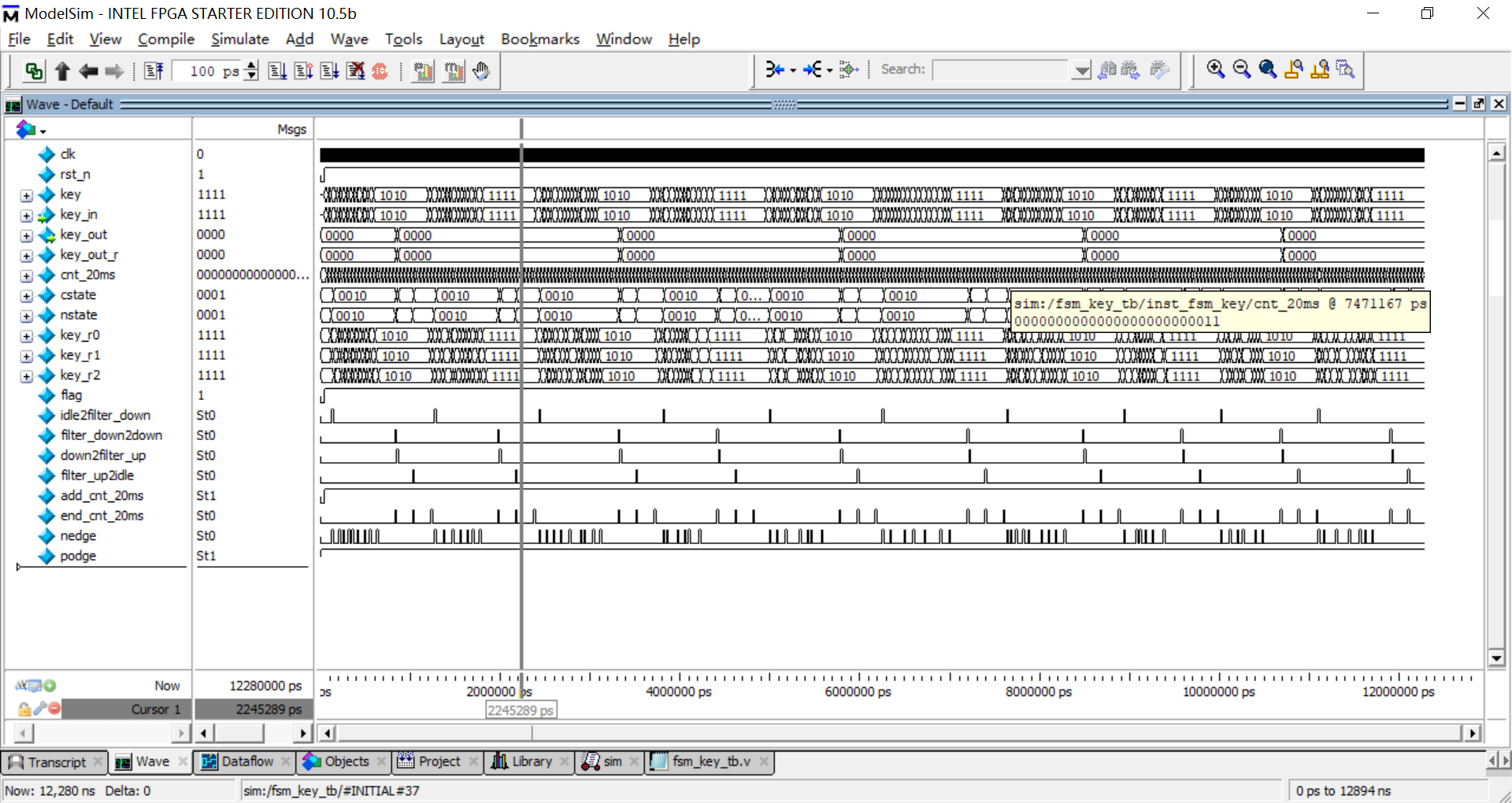
5、总结
使用状态机进行按键消抖,可以经消抖分为四个部分,空闲状态、下降沿状态、按下状态、上升沿状态,这几个状态使用状态机进行按键消抖,可以更好的理解消抖的原理和过程。状态机的规范编写也是提升自己理解时序,理解逻辑的好的方式
相关文章:
状态机实现N位按键消抖
状态机实现N位按键消抖 1、原理 利用状态机实现按键的消抖,具体的原理可参考 (50条消息) 基于FPGA的按键消抖_fpga 按键消抖_辣子鸡味的橘子的博客-CSDN博客 状态机简介: 状态机分类可以主要分为两类:moore和mealy 根据三段式状态机最后…...
uniapp自定义消息语音
需求是后端推送的消息APP要响自定义语音,利用官方插件,总结下整体流程 uniapp后台配置 因为2.0只支持uniapp自己的后台发送消息,所以要自己的后台发送消息只能用1.0 插件地址和代码 插件地址: link let isIos (plus.os.name "iOS&qu…...
k8s安装Jenkins
目录 编辑 一、环境准备 1.1 环境说明 二、安装nfs 2.1 安装NFS 2.2 创建NFS共享文件夹 2.3 配置共享文件夹 2.4 使配置生效 2.5 查看所有共享目录 2.6 启动nfs 2.7 其他节点安装nfs-utils 三、创建PVC卷 3.1 创建namespace 3.2 创建nfs 客户端sa授权 3.3 创建…...

共筑开源新长城 龙蜥社区走进开放原子校源行-清华大学站
6 月 28 日,以“聚缘于校,开源共行”为主题的 2023 年开放原子校源行活动在清华大学成功举行。本次活动由开放原子开源基金会和清华大学共同主办,来自各行业的 22 位大咖共聚校园共话开源。龙蜥社区技术专家边子政受邀进行技术分享࿰…...
、新建分支、切换分支、代码提交))
Jgit 工具类 (代码检出、删除分支(本地、远程)、新建分支、切换分支、代码提交)
https://blog.csdn.net/qq_37203082/article/details/120327084 Jgit 工具类 (代码检出、删除分支(本地、远程)、新建分支、切换分支、代码提交)_jgit删除远程分支_CJ点的博客-CSDN博客 <!--JAVA操作GIT--><dependency><groupId>org.…...

什么是redux?如何在react 项目中使用redux?
redux 概念 redux是一种用于管理JavaScript应用程序的状态管理库。它可以与React、Augular、Vue等前端框架结合使用,但也可以纯在JavaScript应用程序中独立使用。redux遵循单项数据流的原则,通过一个全局的状态树来管理应用程序的状态,从而使…...
mysql的json处理
写在前面 需要注意,5.7以上版本才支持,但如果是生产环境需要使用的话,尽量使用8.0版本,因为8.0版本对json处理做了比较大的性能优化。你你可以使用select version();来查看版本信息。 本文看下MySQL的json处理。在正式开始让我们先…...
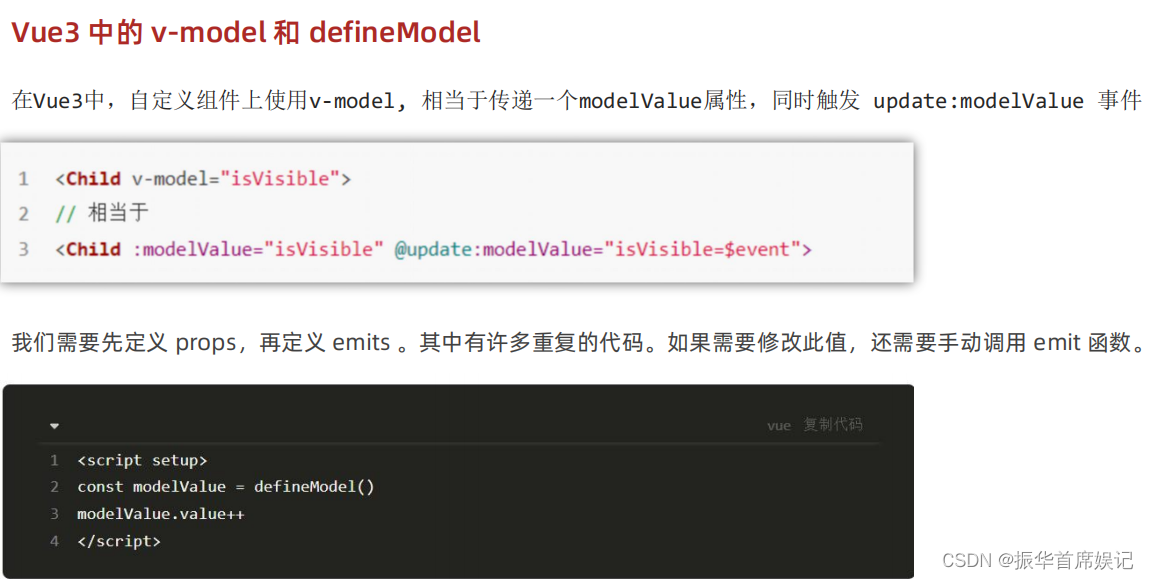
前端学习——Vue (Day8)
Vue3 create-vue搭建Vue3项目 注意要使用nodejs16.0版本以上,windows升级node可以西安使用where node查看本地node位置,然后到官网下载msi文件,在本地路径下安装即可 安装完可以使用node -v检查版本信息 项目目录和关键文件 组合式API - s…...
Windows环境下安装及部署Nginx
一、安装Nginx教程 1、官网下载地址:https://nginx.org/en/download.html 2、下载教程:选择Stable version版本下载到本地 3、下载完成后,解压放入本地非中文的文件夹中: 4、启动nginx:双击nginx.exe,若双击…...

使用AOP切面对返回的数据进行脱敏的问题
1.注解类 import java.lang.annotation.ElementType; import java.lang.annotation.Retention; import java.lang.annotation.RetentionPolicy; import java.lang.annotation.Target;/*** Author: xiaoxin* Date: 2023/7/21 17:15*/ Retention(RetentionPolicy.RUNTIME) Targe…...
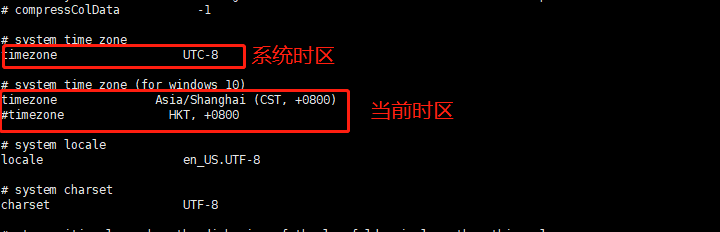
TDengine时区设置
一般来说,时序数据就是带有时间序列属性的数据。在处理时序数据时,TDengine有着自己独特的方式。但是如果没有正确理解TDengine在写入和查询上的行为,极可能会因为配置了错误的时区(timezone),而导致写入和…...

站外引流效果差?一文带你搞懂解海外主流社交媒体算法!
在流量成本越来越高的当下,无论是平台卖家还是独立站卖家都在努力拓展流量渠道。站外引流是推动业务增长的关键策略,很多卖家会把重点放在内容营销上,但其实除了做好内容之前,了解社交媒体的算法才能让营销效果最大化。 01.Faceb…...
css 动画之旋转视差
序:网上看到的一个例子,做一下 效果图: 代码: <style>.content{width: 300px;height: 300px;margin: 139px auto;display: grid;grid-template-columns: repeat(3,1fr);grid-template-rows: repeat(3,1fr);grid-template:…...
maven项目、springboot项目复制文件进来后没反应、不编译解决方法
问题如下 把文件复制进springboot项目后,没反应,不编译。 解决 在maven工具框中选择compile工具,运行即可。...
)
android jetpack App Startup 应用启动时初始化组件(java)
有什么用? 应用启动时初始化组件。 怎么用 添加依赖 dependencies {implementation "androidx.startup:startup-runtime:1.1.1" }创建类,继承Initializer。 public class AppInit implements Initializer<String> {NonNullOverride…...
)
【设计模式|行为型】命令模式(Command Pattern)
说明 命令模式(Command Pattern)是一种行为设计模式,它将请求封装为一个对象,以便在不同的请求者和接收者之间进行解耦、参数化和操作的队列化。命令模式允许你将具体的请求封装为对象,这些对象之间彼此独立ÿ…...

SqlServer 批量删除表
SqlServer 批量删除表 直接上SQL脚本吧 SELECT row_number()over(order by Name) as FID,Name into #temp FROM SysObjects Where XTypeU --类型,U为实体表 and name like TMP% --表名过滤(自定义就好) ORDER BY Namedeclare count int 0…...
[Linux]线程基本知识
概念 进程 一个正在执行的程序,它是资源分配的最小单位 进程中的事情需要按照一定的顺序逐个进行 进程出现了很多弊端: 一是由于进程是资源拥有者,创建、撤消与切换存在较大的时空开销,因此需要引入轻型进程; 二是由于对称多…...

STM32 串口基础知识学习
串行/并行通信 串行通信:数据逐位按顺序依次传输。 并行通信:数据各位通过多条线同时传输。 对比 传输速率:串行通信较低,并行通信较高。抗干扰能力:串行通信较强,并行通信较弱。通信距离:串…...

页面滚动时隐藏element-ui下拉框/时间弹框
场景 在系统中,当(有垂直滚动时)点击下拉框后滚动页面,会发现下拉项会遮盖住页面中的元素,不会隐藏 解决:(以vue为例) 在页面滚动或者缩放时隐藏下拉项即可(借助点击目标元素,下…...

TDA4VEN-Q1入门级ADAS SoC:异构架构与全景泊车方案实战
1. 项目概述:为什么选择TDA4VEN-Q1这颗“入门级”SoC?在汽车电子,尤其是ADAS(高级驾驶辅助系统)领域,选型永远是项目成败的第一步。面对市场上琳琅满目的处理器,从动辄几十TOPS算力的域控制器芯…...

终极指南:3分钟搞定Windows iPhone网络共享驱动一键安装
终极指南:3分钟搞定Windows iPhone网络共享驱动一键安装 【免费下载链接】Apple-Mobile-Drivers-Installer Powershell script to easily install Apple USB and Mobile Device Ethernet (USB Tethering) drivers on Windows! 项目地址: https://gitcode.com/gh_m…...

SPT-AKI存档编辑器完整指南:快速定制你的离线塔科夫体验
SPT-AKI存档编辑器完整指南:快速定制你的离线塔科夫体验 【免费下载链接】SPT-AKI-Profile-Editor Программа для редактирования профиля игрока на сервере SPT-AKI 项目地址: https://gitcode.com/gh_mirrors…...

NotebookLM显著性判断失效真相:92%用户忽略的3个统计学前提及实时校验脚本
更多请点击: https://codechina.net 第一章:NotebookLM显著性判断失效的典型现象与影响评估 NotebookLM 在处理多源异构文档时,其内置的“显著性判断”模块(Significance Scorer)常因语义稀疏、上下文截断或引用锚点偏…...

ARMv8 AArch32调试异常机制与断点技术详解
1. AArch32调试异常架构解析在ARMv8架构的AArch32执行状态下,调试异常机制为开发者提供了强大的程序控制能力。这套机制通过硬件断点和软件断点指令(BKPT)实现对程序执行流的精确控制,其核心设计哲学体现在三个层面:异…...

2026年京东云OpenClaw/Hermes Agent配置Token Plan详细搭建教程
2026年京东云OpenClaw/Hermes Agent配置Token Plan详细搭建教程。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Token Plan兼容主流 AI 工具&…...

新手入门教程使用Python快速配置Taotoken的OpenAI兼容API调用环境
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 新手入门教程使用Python快速配置Taotoken的OpenAI兼容API调用环境 对于刚接触大模型API的Python开发者来说,快速搭建一…...

揭秘AI教材编写秘诀!低查重AI写教材工具,让教材写作高效又轻松!
许多教材编写人员常常感到遗憾 许多教材编写人员常常感到遗憾,虽然他们的正文内容经过精心打磨,但由于缺乏必要的辅助资源,导致整体教学效果受到影响。比如,设计具有层次感的课后练习题时,常常缺乏新颖的思路…...

5分钟快速上手:通达信缠论可视化插件ChanlunX实战指南
5分钟快速上手:通达信缠论可视化插件ChanlunX实战指南 【免费下载链接】ChanlunX 缠中说禅炒股缠论可视化插件 项目地址: https://gitcode.com/gh_mirrors/ch/ChanlunX 你是否为复杂的缠论分析感到头疼?面对密密麻麻的K线图,如何快速识…...

终极QQ空间备份指南:用GetQzonehistory永久保存你的青春记忆
终极QQ空间备份指南:用GetQzonehistory永久保存你的青春记忆 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 你是否也曾担心多年积累的QQ空间说说会随着时间消失?…...