【移动机器人运动规划】01 —— 常见地图基础 |图搜索基础
文章目录
- 前言
- 相关代码整理:
- 相关文章:
- 可视化网址:
- 常用地图基础
- Occupancy grid map
- Octo-map
- Voxel hashing
- Point cloud map
- TSDF map
- ESDF map
- Free-space Roadmap
- Voronoi Diagram Map
- 图搜索基础
- 配置空间
- 图搜索基本概念
- Dijkstra
- AStar
- Astar的一些变种(次优算法)
- AStar在工程实践中的注意点
- Jump Point Search(JPS)
- Look Ahead Rule
- Jumping Rules
- 示例
- 伪代码
- 结论
- 一些问题与解决方案
- 问题1 PCL requires C++14 or above
前言
本文部分内容参考了深蓝学院的移动机器人运动规划,依此做相关的笔记与整理。
相关代码整理:
- https://gitee.com/lxyclara/motion-plan-homework/
- https://github.com/KailinTong/Motion-Planning-for-Mobile-Robots/blob/master
相关文章:
- 自动驾驶路径规划——Dijkstra算法
- 自动驾驶路径规划——A*(Astar)算法
- 【ROS-Navigation】—— Astar路径规划算法解析
- 【Apollo学习笔记】—— Routing模块
可视化网址:
- http://qiao.github.io/PathFinding.js/visual/
- https://github.com/daohu527/osm-pathfinding或https://daohu527.github.io/
常用地图基础
规划时需要对环境信息进行处理,构建相应的数学模型,依据不同的策略处理环境信息,以便于对环境进行分析和计算,对路径进行搜索和优化。合理的地图建模方法有利于减少路径规划的计算量,从而加快运算速度,减少存储空间。下面将会介绍常用的地图。
Occupancy grid map
占据栅格地图
GitHub地址: https://github.com/ANYbotics/grid_map
地图特点:
- Most Dense稠密
- Structural结构化
- Direct Index Query可以直接进行坐标索引查询
- 栅格划分越细,所占用的内存空间越大
在进行路径规划时采用栅格表示地图,处理障碍物的边界时,避免了复杂的计算。它具有表示不规则障碍物的能力,并适用于所有类型的传统或智能路径搜索算法。
具体细节可参考:自动驾驶路径规划——基于MATLAB的栅格地图

Octo-map
八叉树地图
github地址: https://octomap.github.io/
地图特点:
• Sparse 稀疏
• Structural 结构化
• Indirect Index Query 非直接的查询,递归查询


Voxel hashing
哈希建图
github: https://github.com/niessner/VoxelHashing
地图特点:
• Most Sparse
• Structural
• Indirect Index Query
具体细节详见:Voxel Hashing阅读笔记

Point cloud map
点云地图
地址:http://pointclouds.org/
地图特点:
• Un-ordered 无序
• No Index Query

TSDF map
Truncated Signed Distance Functions
截断符号距离
地址: https://github.com/personalrobotics/OpenChisel
地图特点:
- 障碍物之外距离场值为正,反之为负。
- 只关注视锥之内
可以参考这篇博客:截断符号距离 | TSDF, Truncated Signed Distance以及这篇论文《Truncated Signed Distance Function: Experiments on Voxel Size》

ESDF map
欧几里得符号距离场
Euclidean Signed Distance Functions Incremental Update, Global Map
参考地址:
voxblox https://github.com/ethz-asl/voxblox
地图特点:
与TSDF相比不仅仅只关注视锥内。

Free-space Roadmap
地址:https://github.com/HKUST-Aerial-Robotics/Teach-Repeat-Replan

Voronoi Diagram Map
地址:https://github.com/ethz-asl/mav_voxblox_planning
图搜索基础
配置空间
机器人配置:对机器人一系列点的位置的描述
自由度(DOF):用最少的坐标数量 n n n去描述机器人配置
机器人配置空间:一个 n n n维的空间包括了所有机器人配置的可能,被表示为 C-space ,任何一个可能的位姿在C-space中表述为一个点。
为什么需要配置空间呢?如下图所示,不同的机器人有着不同的形状和大小,若在一般的工作空间中进行碰撞检测,需要知道机器人的几何信息,这是十分浪费时间、算力且复杂的。

在配置空间C-space中,机器人被描述为一个质点(位置 p o s i t i o n position position被描述为 R 3 R^3 R3空间中的一个点,位姿 p o s e pose pose被描述为 S O ( 3 ) SO(3) SO(3)空间中的一个点)。通过将机器人视为一个质点,同时对障碍物按照机器人的形状进行适当碰撞,可以得到配置障碍空间,称为C-obstacle。C-obstacle需要在规划之前完成设置,且是一次性的。其余没有障碍物的空间,描述为自由空间C-free。显然, C s p a c e = C o b s t a c l e ∪ C f r e e C_{space}=C_{obstacle} \cup C_{free} Cspace=Cobstacle∪Cfree。
因此规划可以直接在C-free空间中进行,而不用考虑机器人自身的几何信息。

图搜索基本概念
图、有向图、无向图等等概念在图论、数据结构中已有不少阐述,这里就不赘述了。
对于图搜索问题,首先便是要构造图用以状态描述。在栅格地图中,每个栅格可以用作节点,栅格之间的连接距离可以用作边;在采样图中,通常将采样点作为节点,节点之间的连接被认为边。
有了图之后,便可以进行搜索。对于图搜索问题,其实就是从起点到终点寻得一条代价值最小的路径的问题。图搜索可以产生一个搜索树,二者是等效的。通过回溯(back-tracing)终点到起点的节点,便可以得到相应的路径。但通常图搜索问题难以被完全描述,搜索树也难以被完全建立,因此如何快速、有效地搜索到路径便是图搜索算法所面临的问题。

图搜索算法大体有如下一个框架:设置一个集合用以存储待访问的节点,集合首先会初始化,将起点作为第一个节点,接着会进入以下循环:
- 移出节点:节点被访问过后,移出这个节点
- 扩展:搜索这个节点的邻居
- 放入节点:将这些邻居节点放入集合中
不断进行以上循环,直到达到目标或相应的判断条件。循环终止条件可以是当上述集合为空时;对于已访问过的节点,通常加入到closed集中,防止再次访问。
经典的搜索算法有BFS、DFS、Dijkstra等等,可以参考这篇博客自动驾驶路径规划——Dijkstra算法。Greedy Best First Search和AStar可以参考这篇博客自动驾驶路径规划——A*(Astar)算法
Dijkstra
算法伪代码

PS1:设置一个优先队列(小顶堆应该也行)
PS2:Cnm为从n到m的cost
示例:
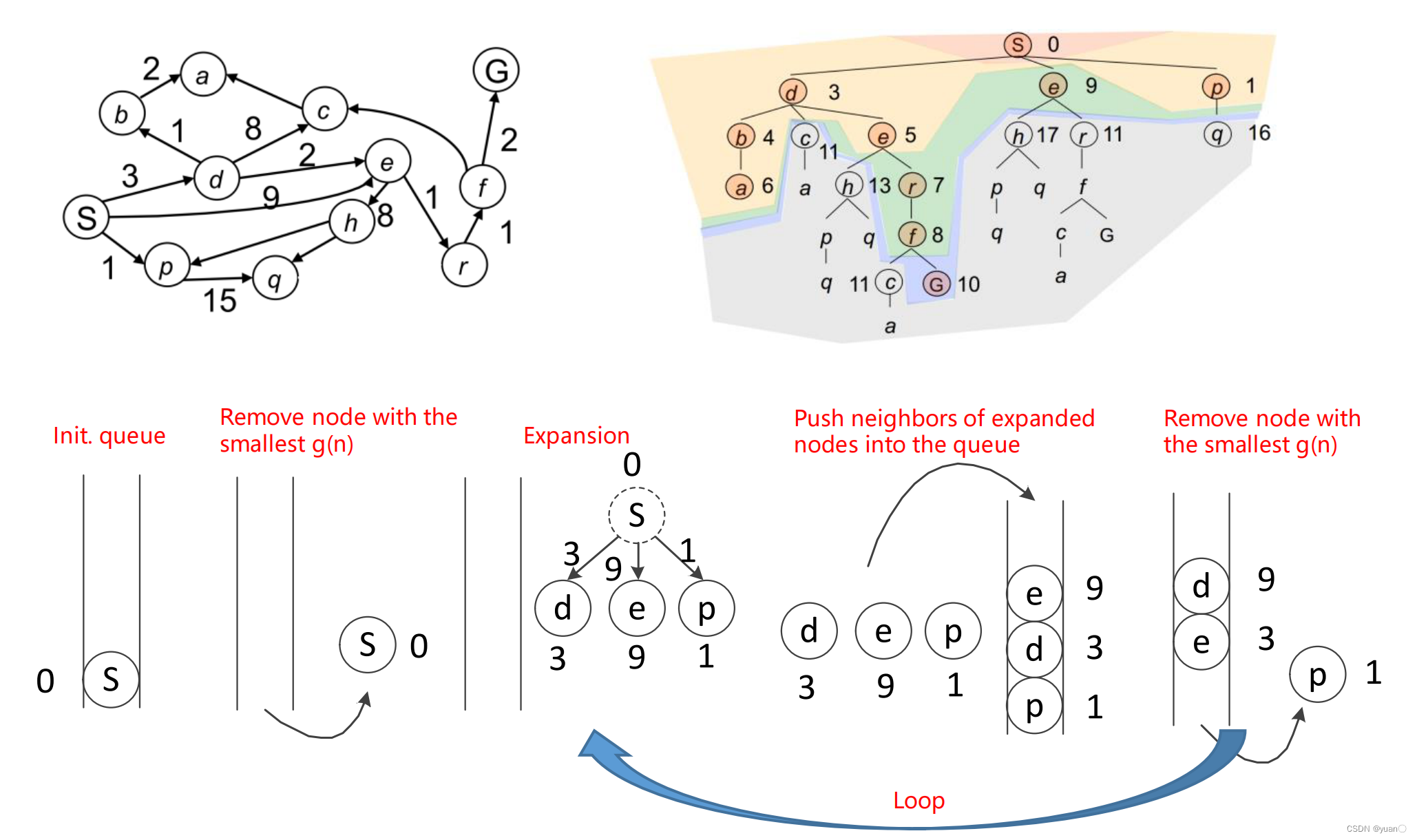
优点:完备性且最优
缺点:1. 均匀扩散性地搜索;2. 没有目标点的信息,盲目性。

AStar

伪代码

示例:
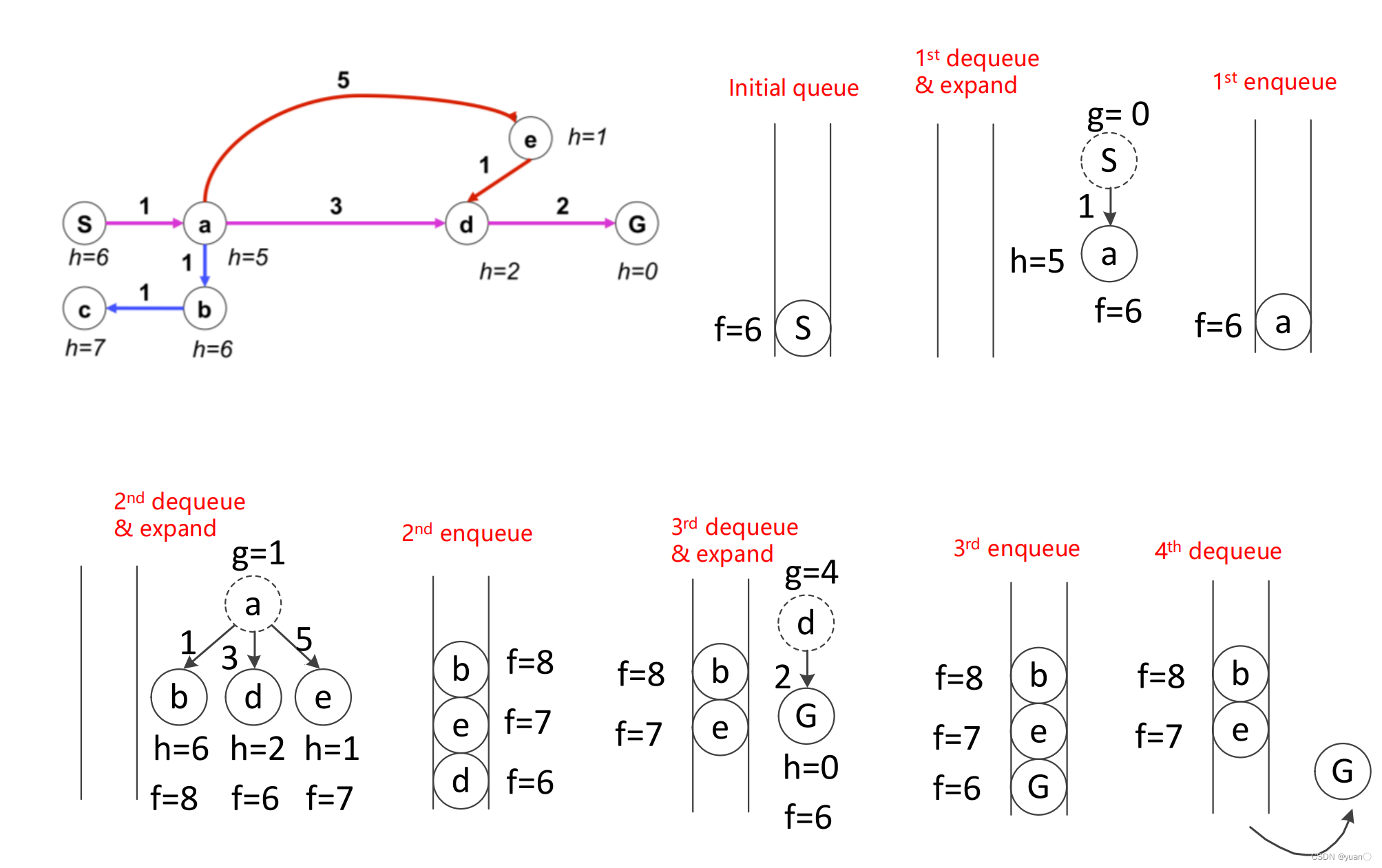
PS:AStar的重点在于启发函数的设计,估计值需要满足小于等于实际值
| 启发函数 | 可行性 |
|---|---|
| Euclidean distance (L2 norm) | 可行 |
| Manhattan distance (L1 norm) | 不一定,依据机器人运动学具体情况 |
| L∞ norm distance | 可行 |
| 0 distanc | 可行 |
Astar的一些变种(次优算法)
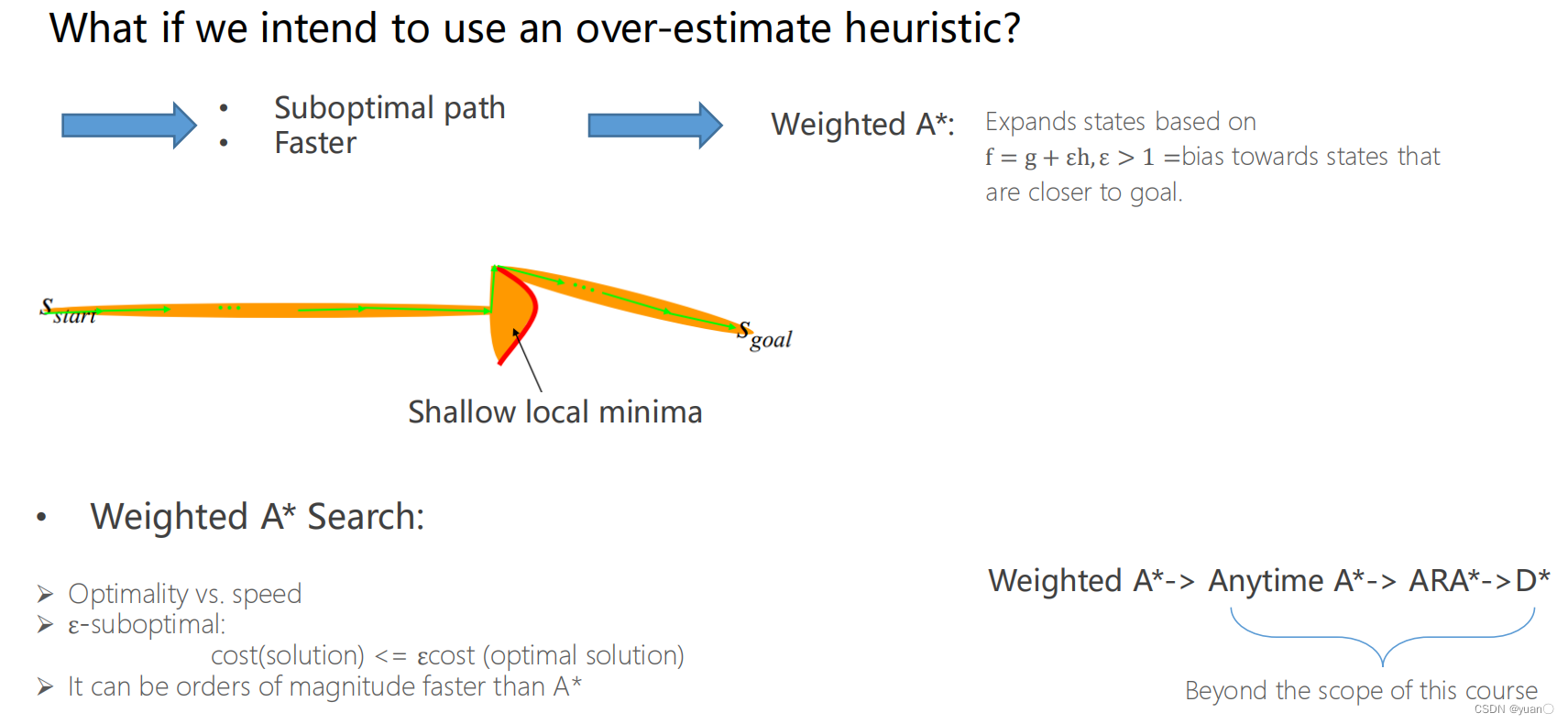
Weighted AStar: 代价函数 f ( n ) = g ( n ) + ε h ( n ) , ε > 1 f(n)=g(n)+εh(n),ε>1 f(n)=g(n)+εh(n),ε>1
用最优换速度:得到次优解,但速度提升大
其代价值大致可估算为:cost(solution)<=εcost(optimal solution)
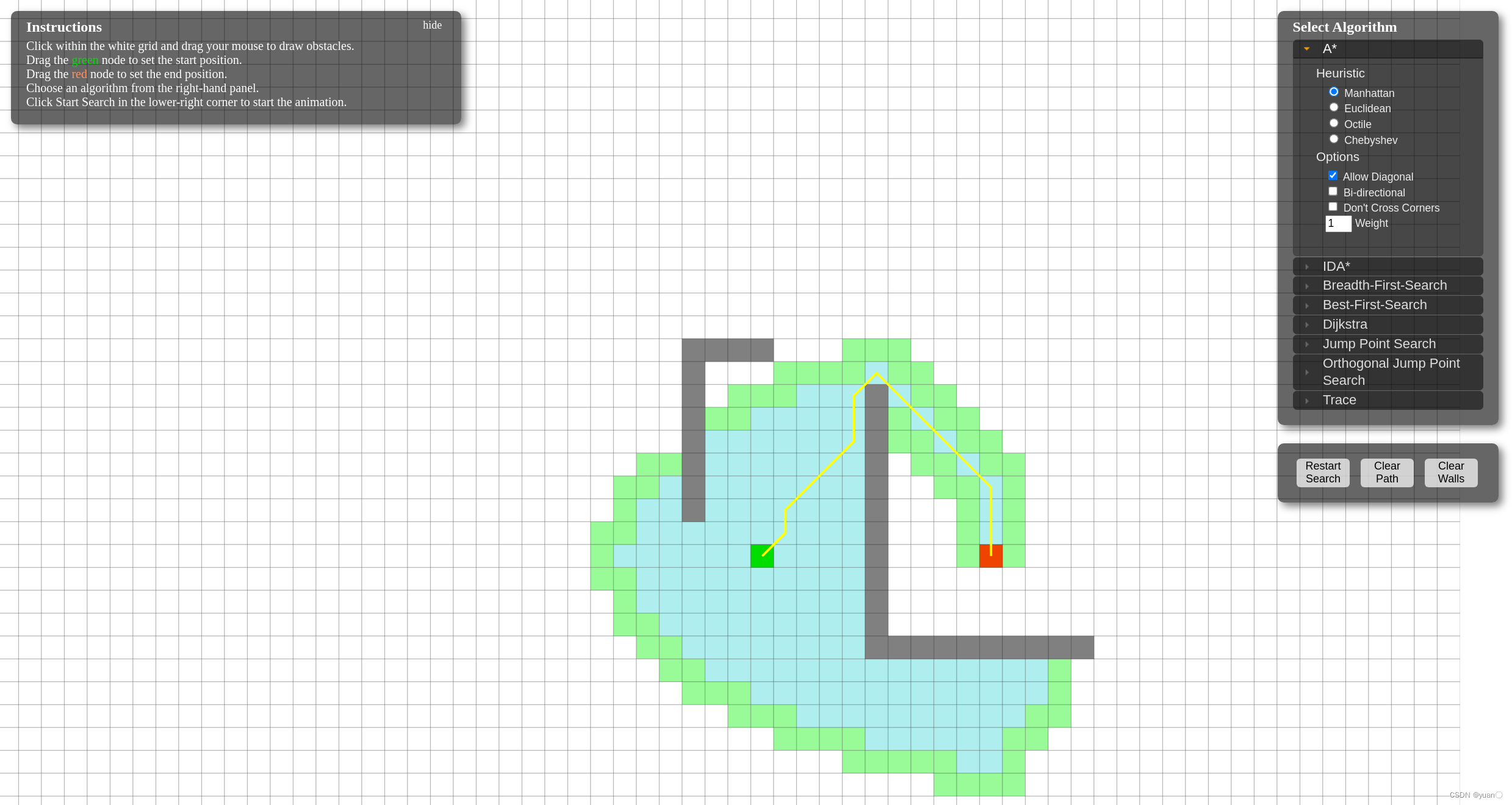
可视化的一个网站:http://qiao.github.io/PathFinding.js/visual/
AStar在工程实践中的注意点
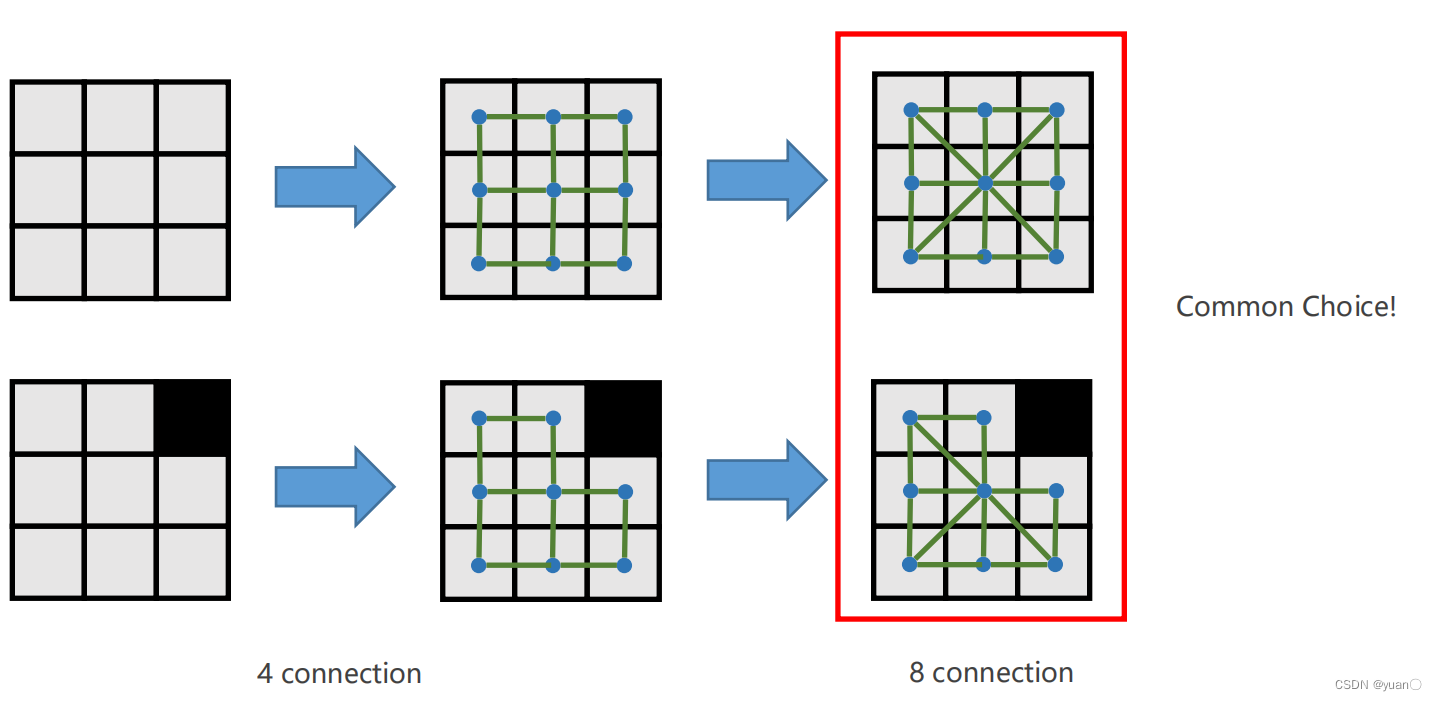
- 如何将栅格地图描述为图(4邻域/8邻域)
- Priority queue in C++的构造技巧
• std::priority_queue
• std::make_heap
• std::multimap - 合适的启发函数(尽可能贴近实际值)

栅格地图高度结构化,可以计算出最近的距离,设计最tight的启发函数(对角启发函数)。
d x = a b s ( n o d e . x − g o a l . x ) dx=abs(node.x −goal.x) dx=abs(node.x−goal.x)
d y = a b s ( n o d e . y − g o a l . y ) dy=abs(node.y −goal.y) dy=abs(node.y−goal.y)
h = ( d x + d y ) + ( √ 2 − 2 ) ∗ m i n ( d x , d y ) h=(dx+dy)+(√2−2)∗min(dx,dy) h=(dx+dy)+(√2−2)∗min(dx,dy)
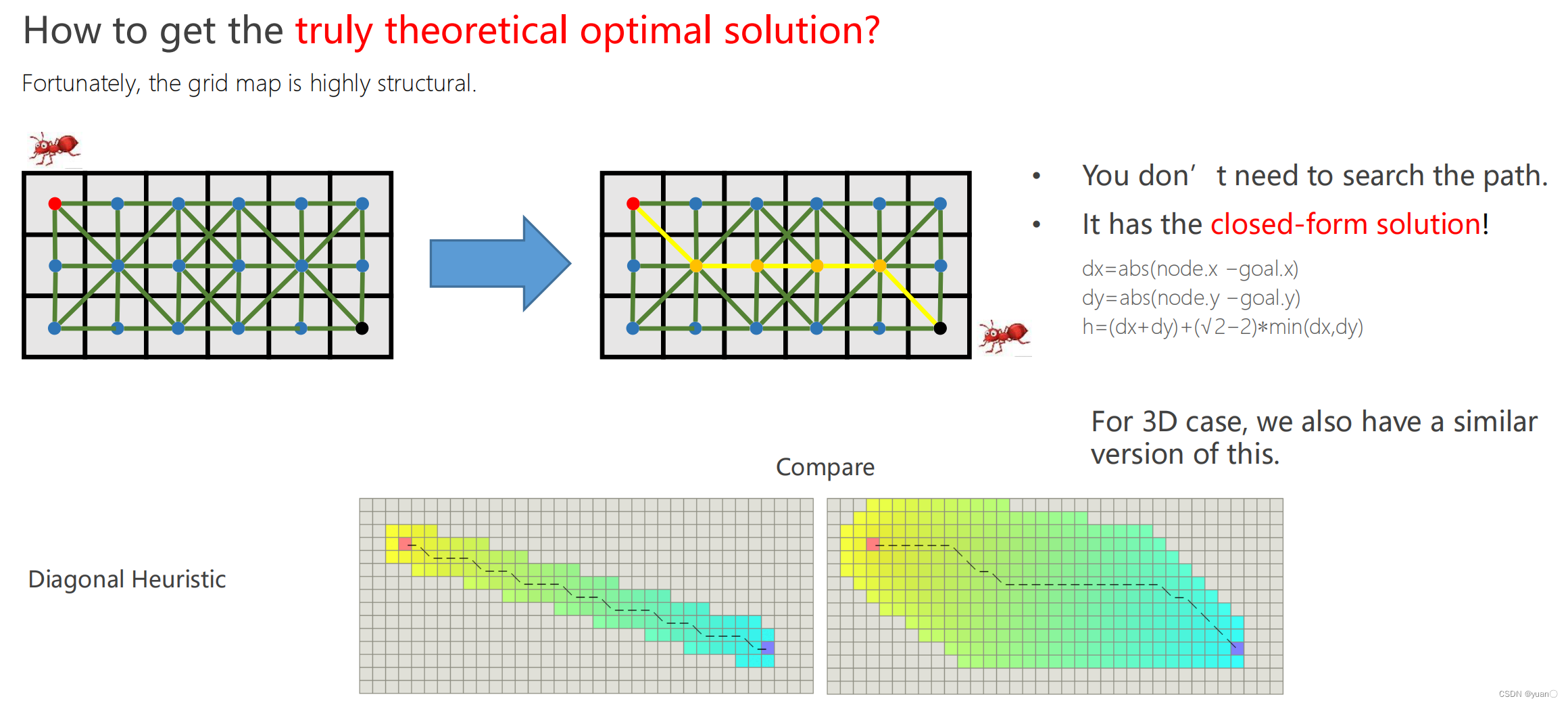
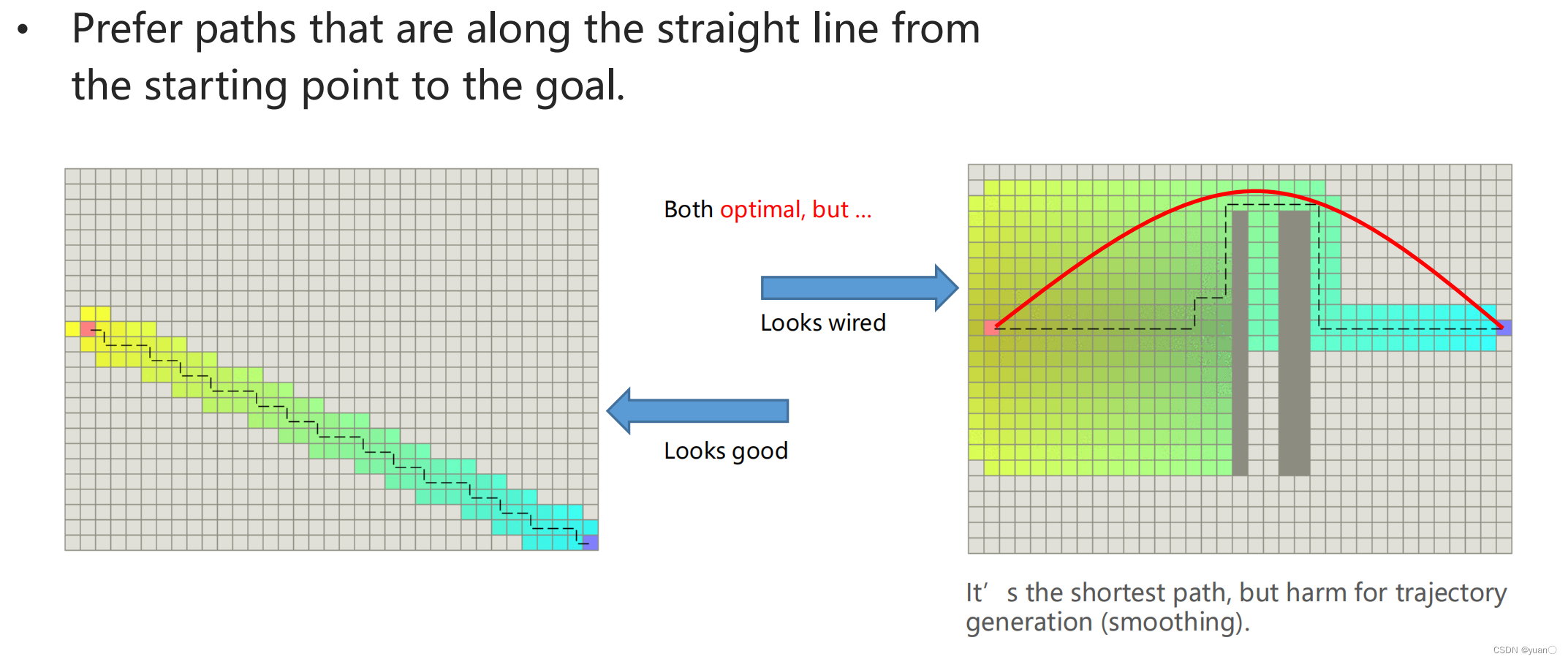
path具有对称性 - Tie Breaker(打破平衡)
轻微放大启发函数。理论上可能会出现非完备性,实际上轻微的放大几乎不会有影响。
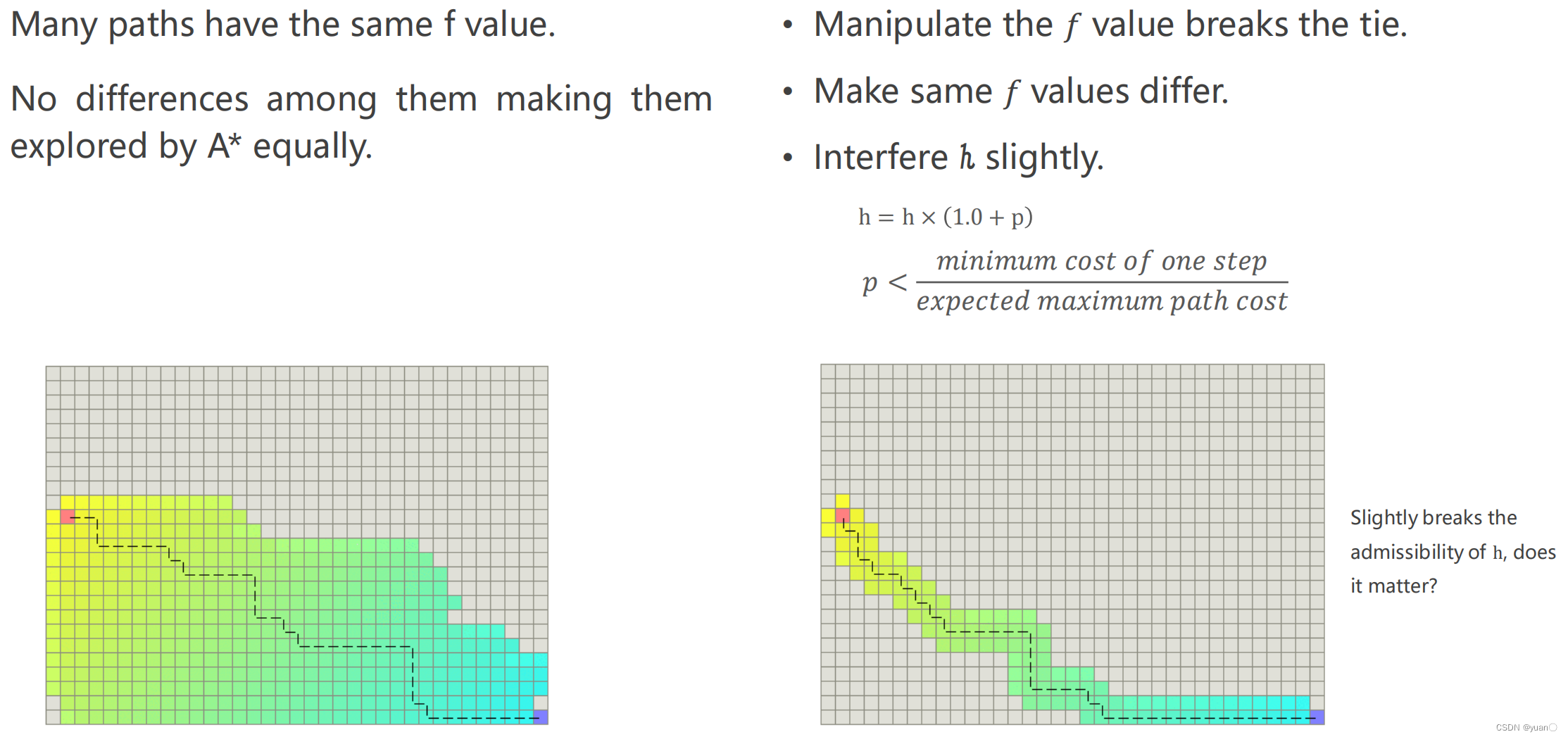
相同f比较h/增加固定的随机cost,并用哈希表实现/增加倾向性

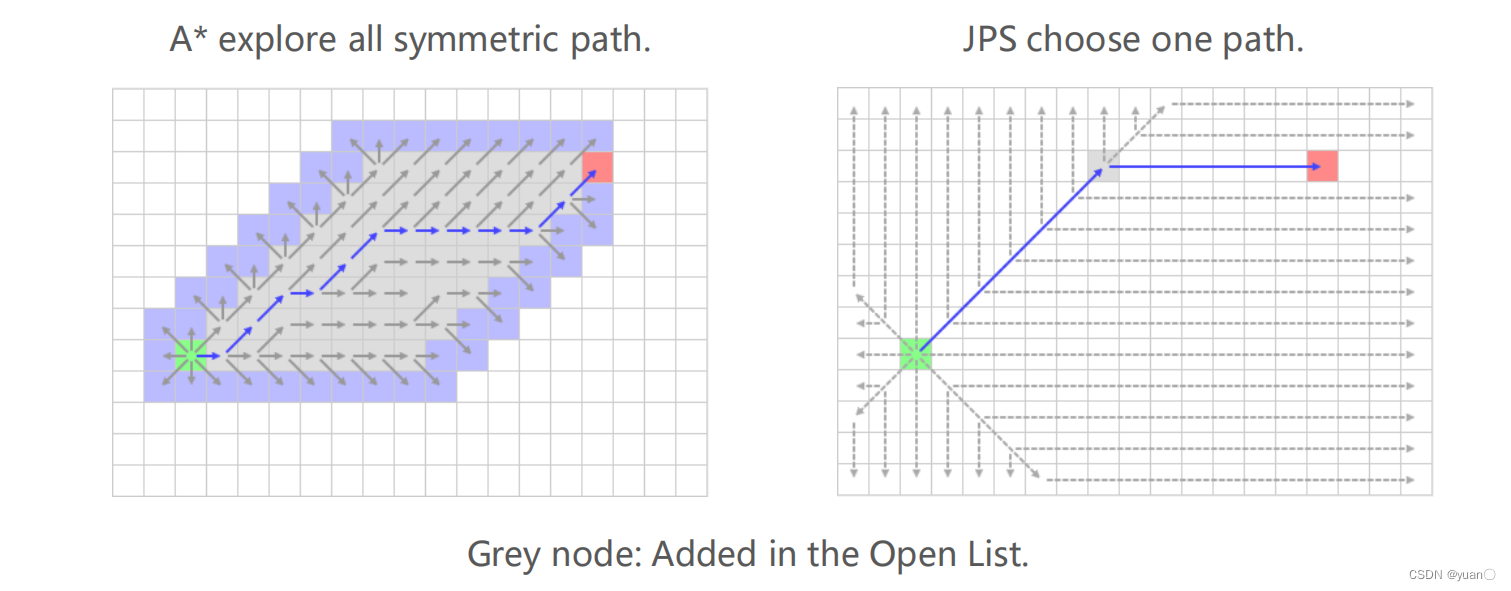
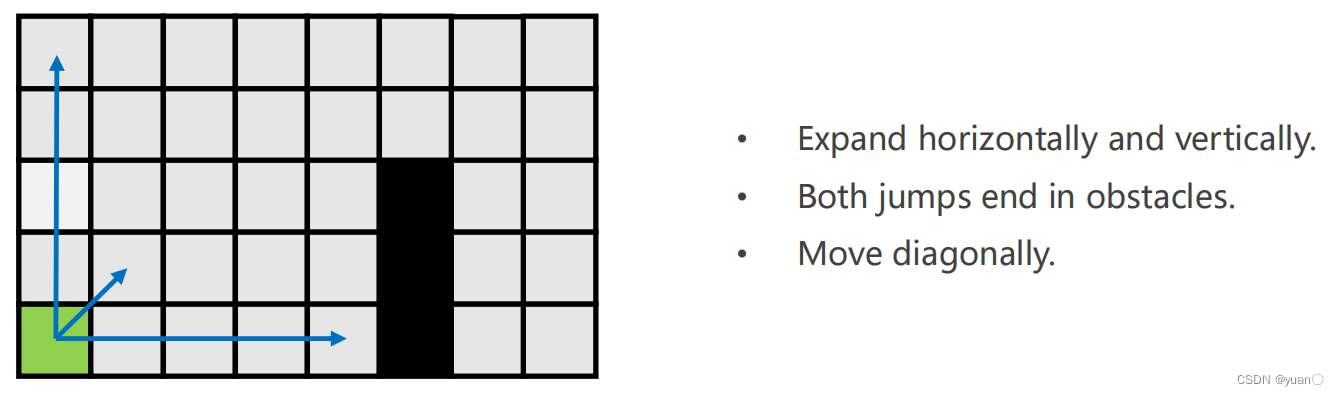
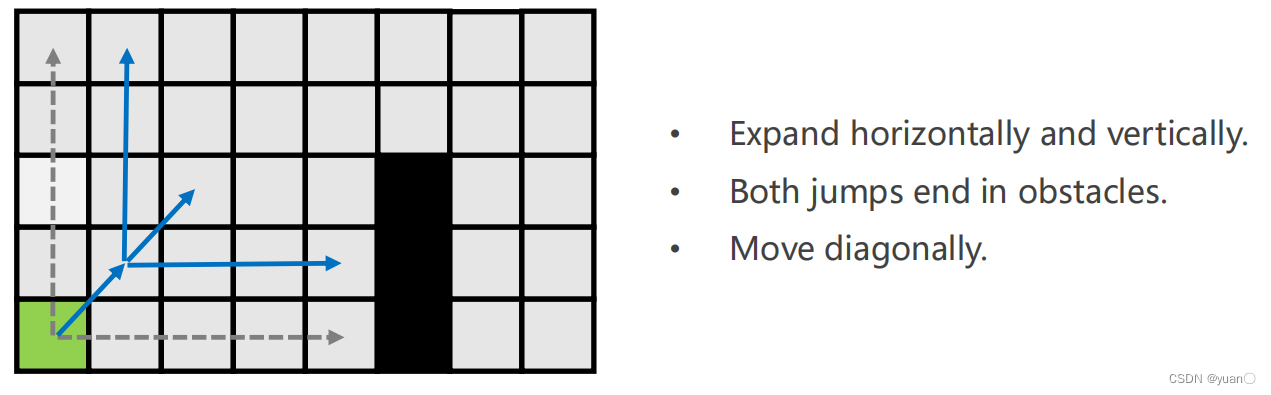
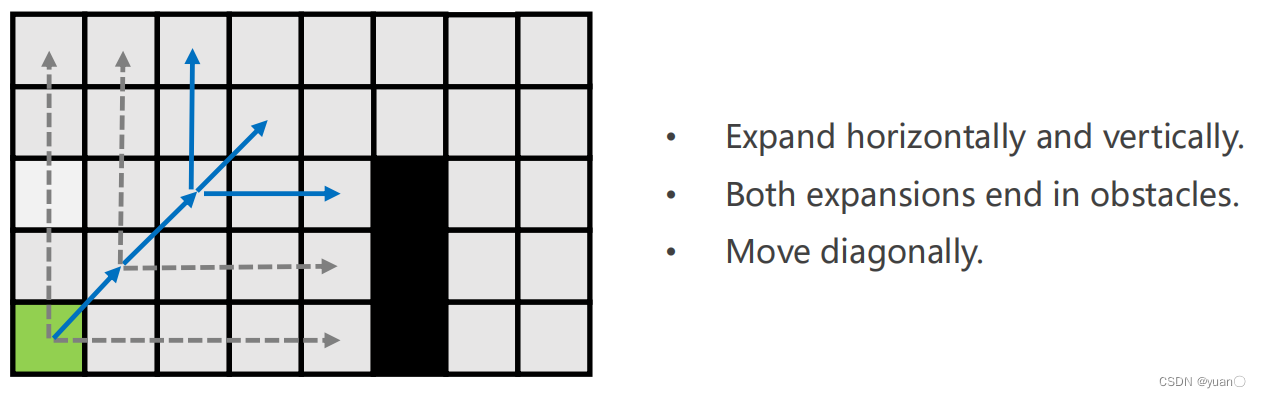
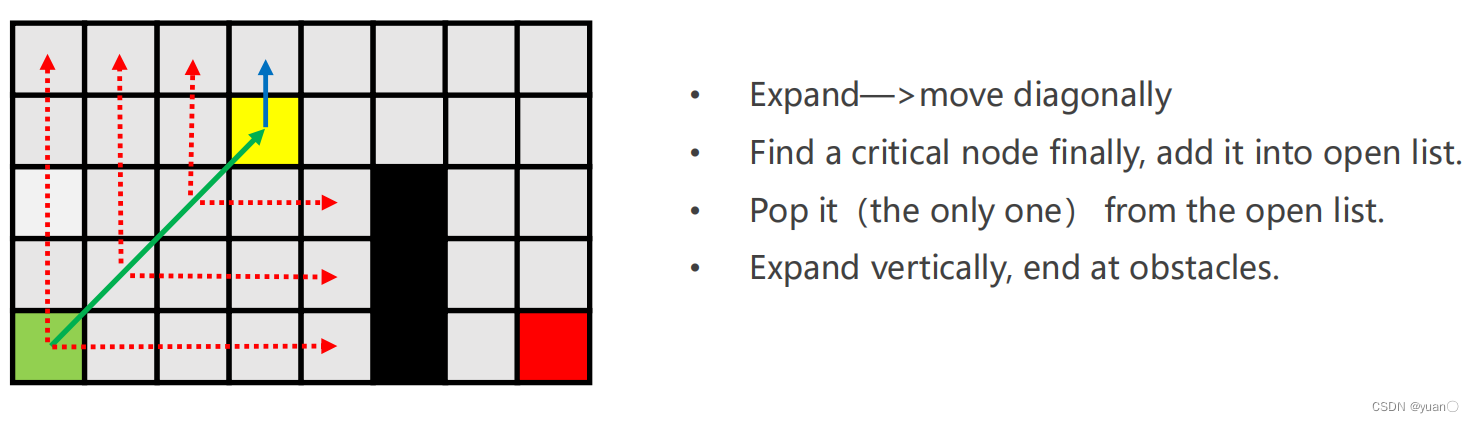
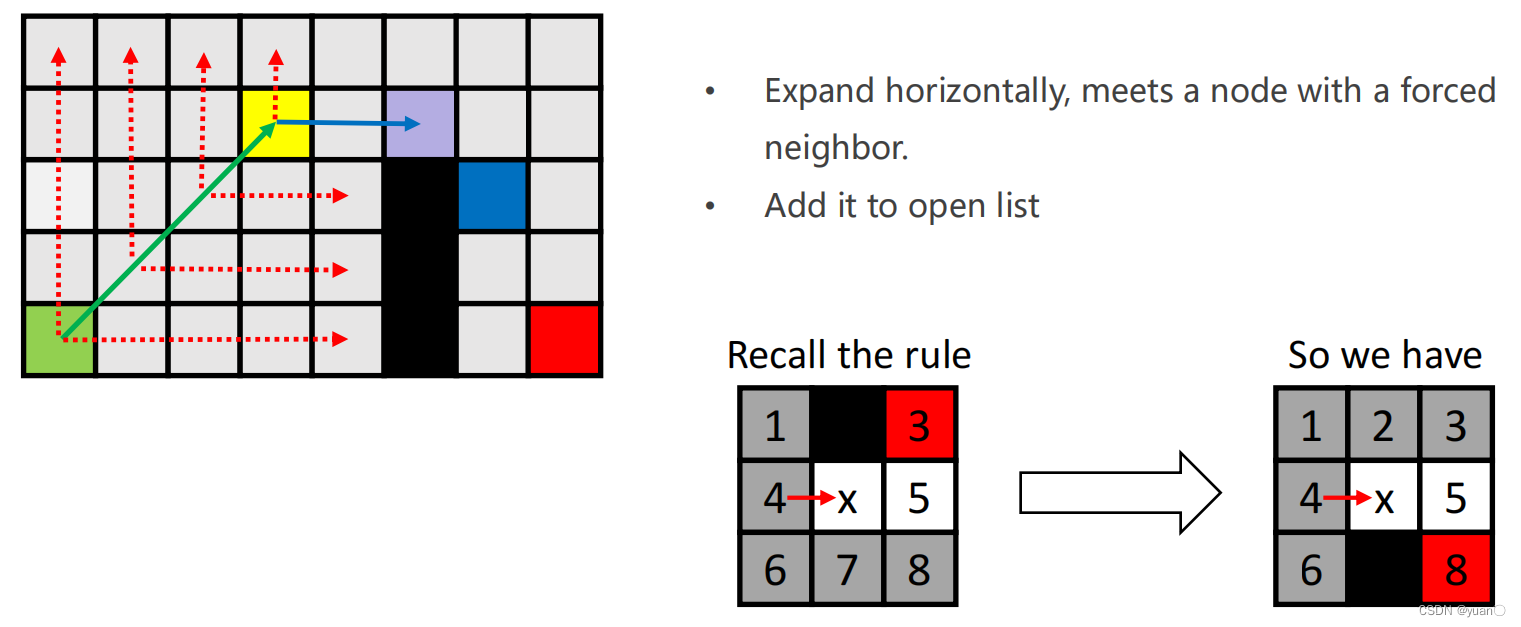
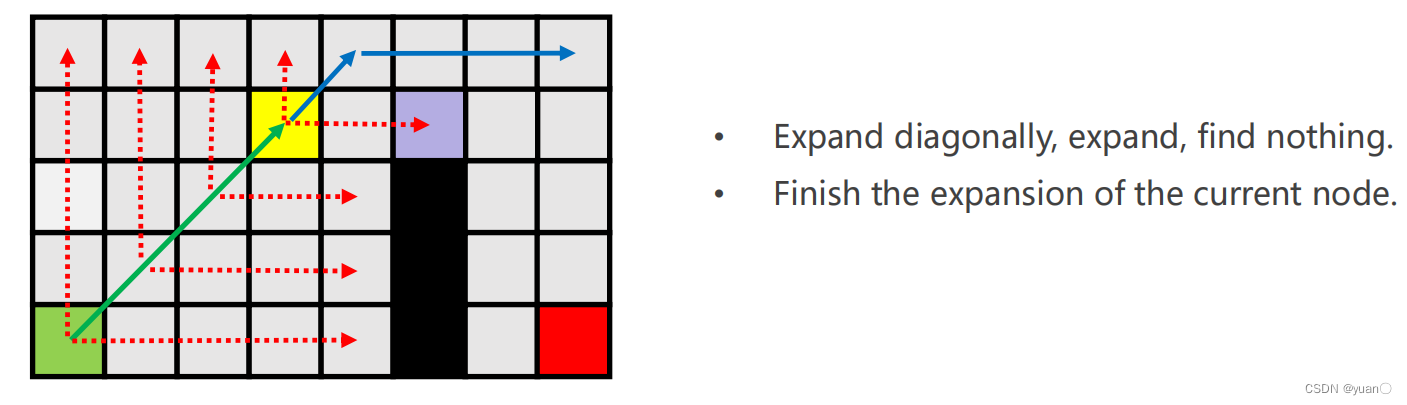
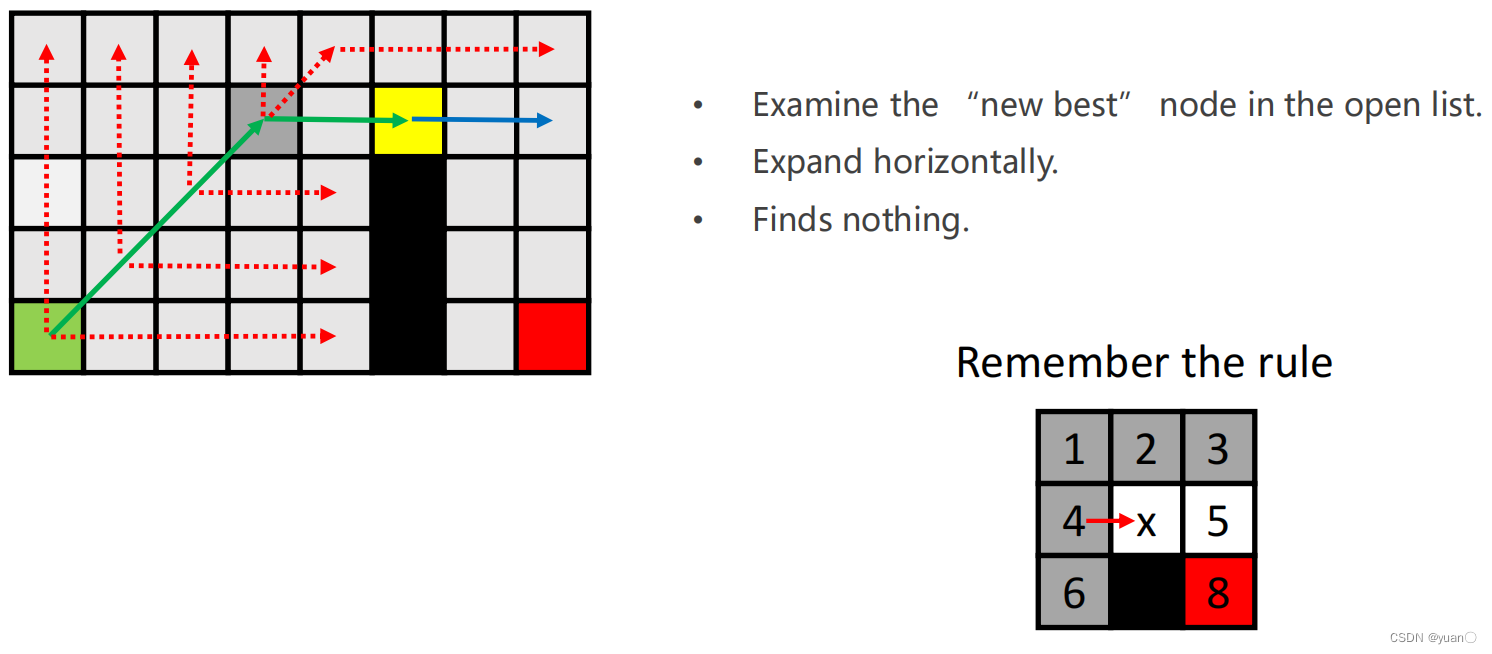
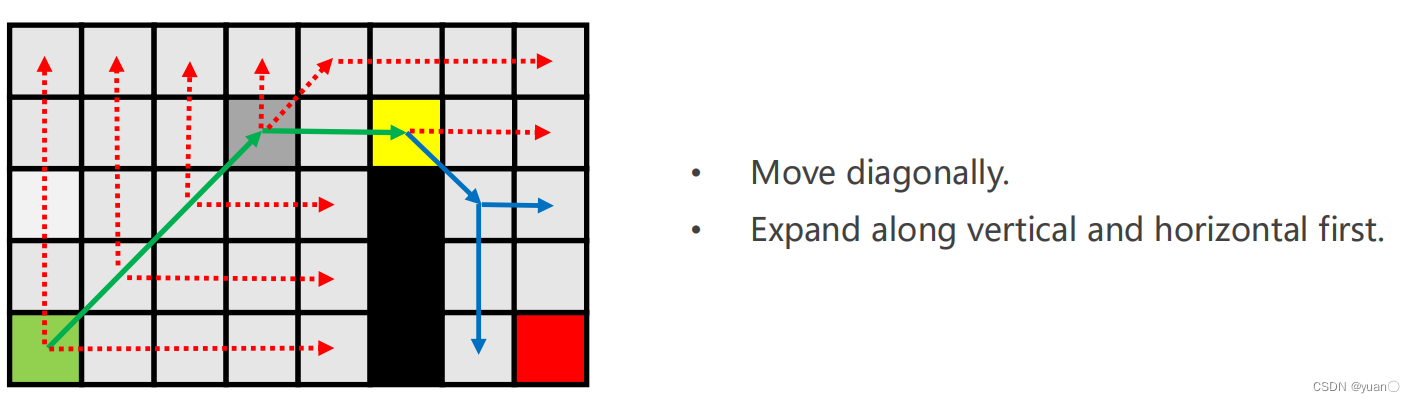
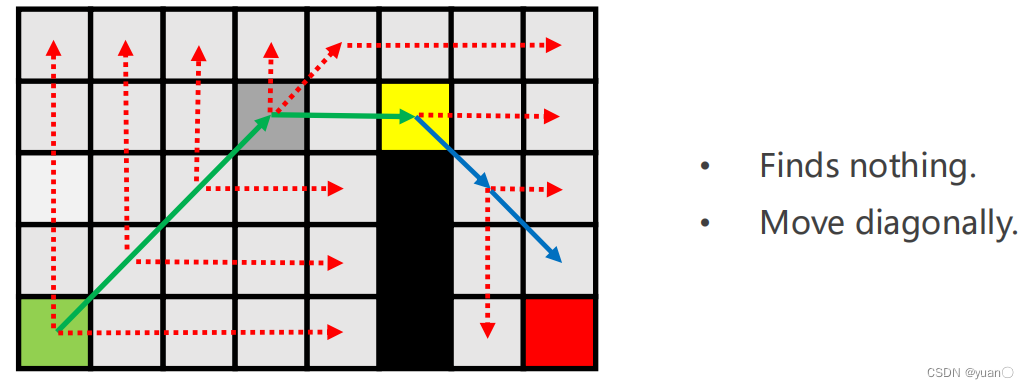
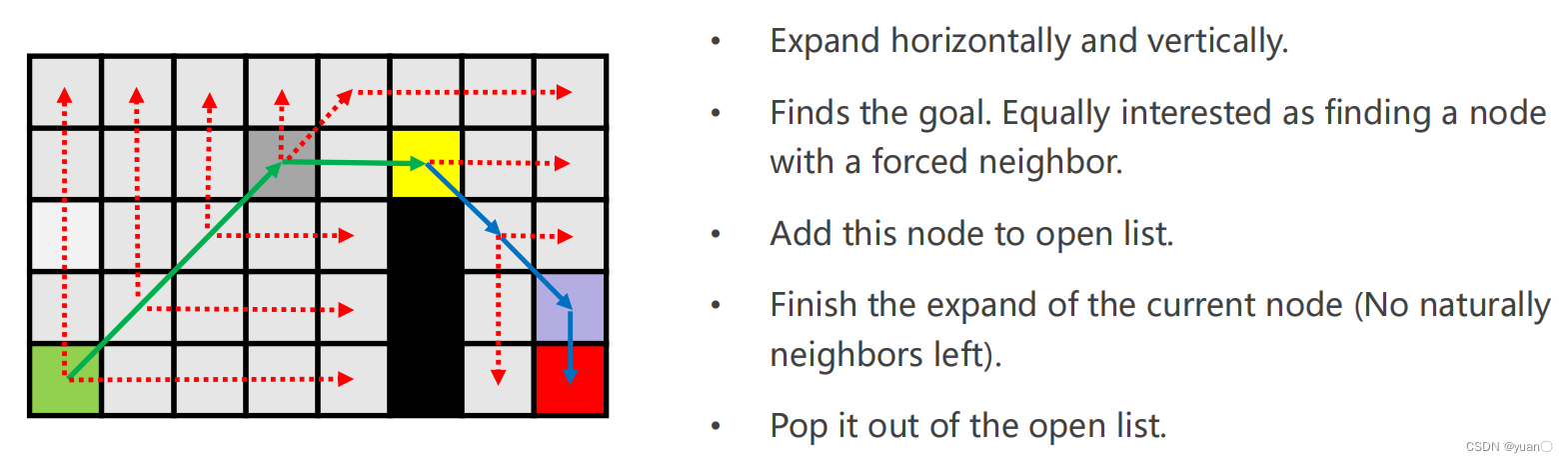
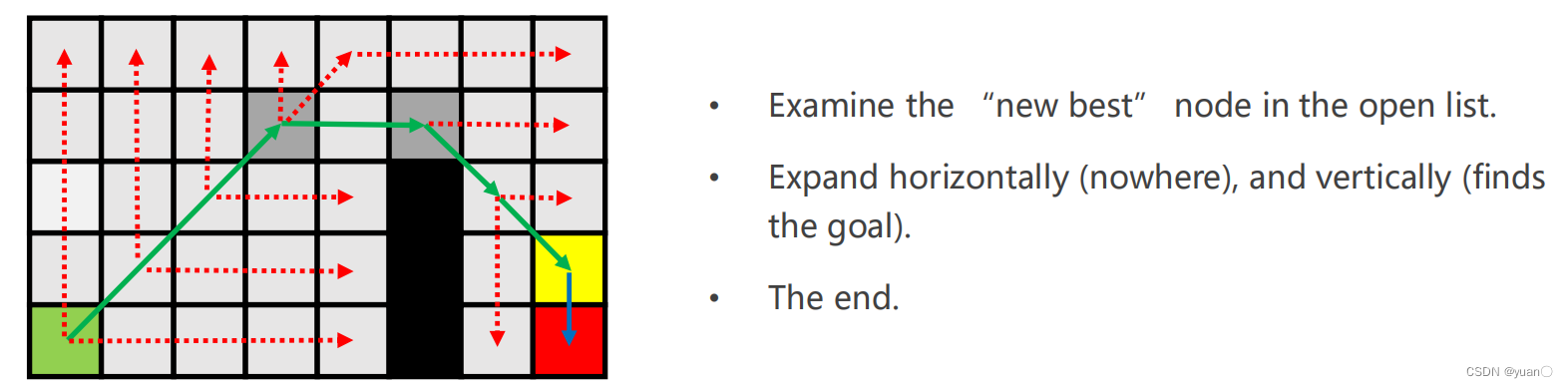
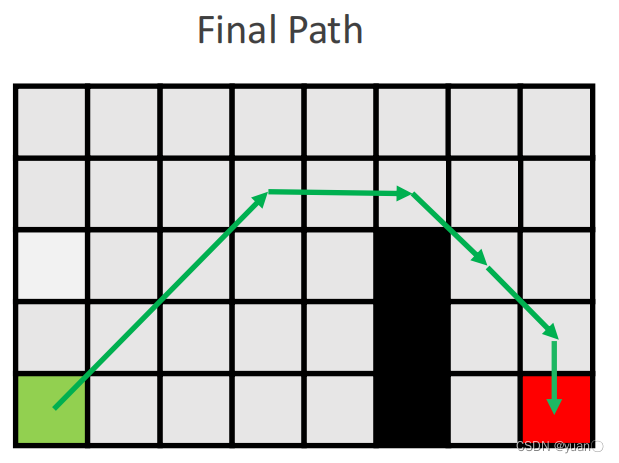
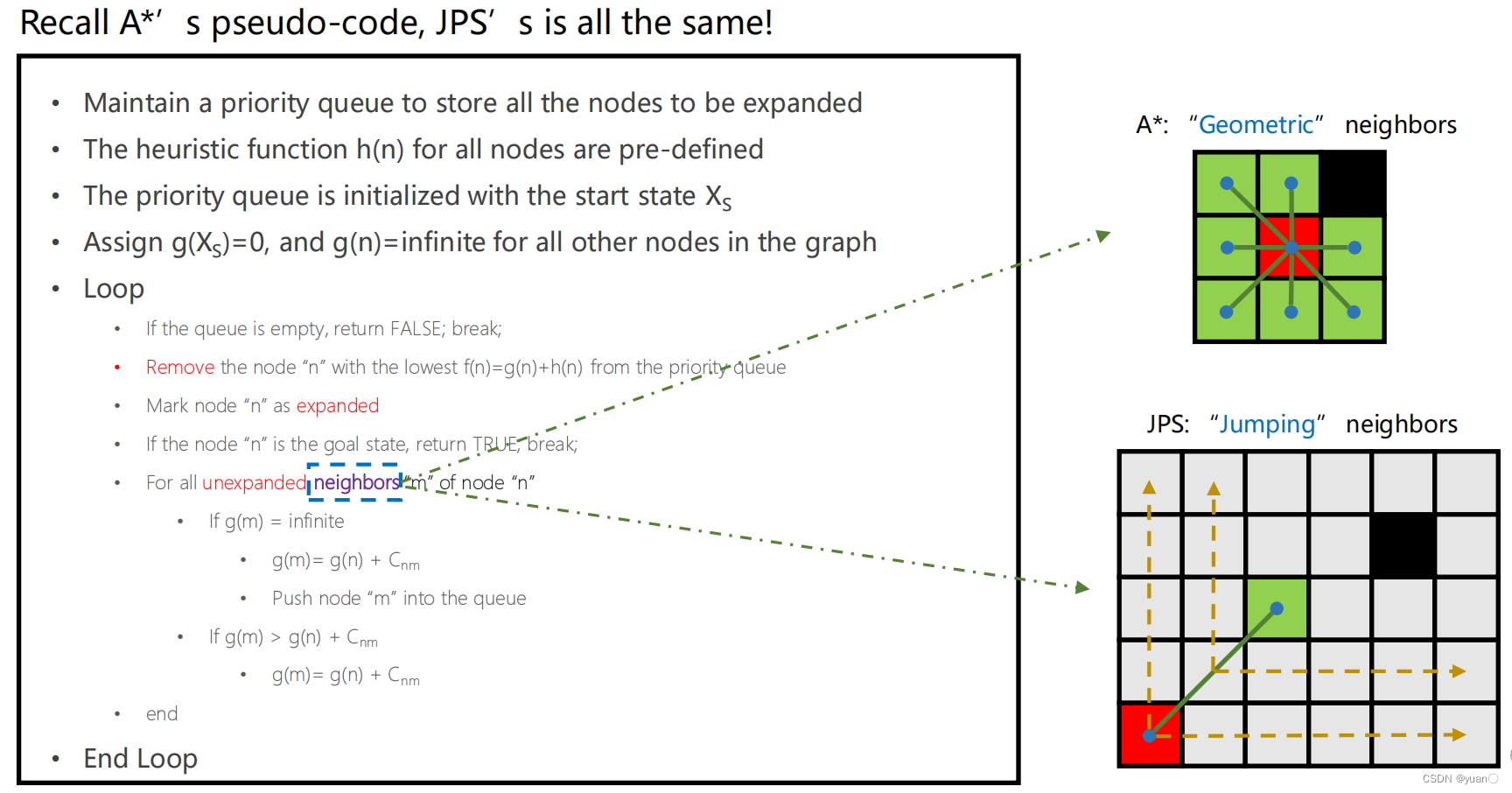
Jump Point Search(JPS)
找到对称性并打破它们
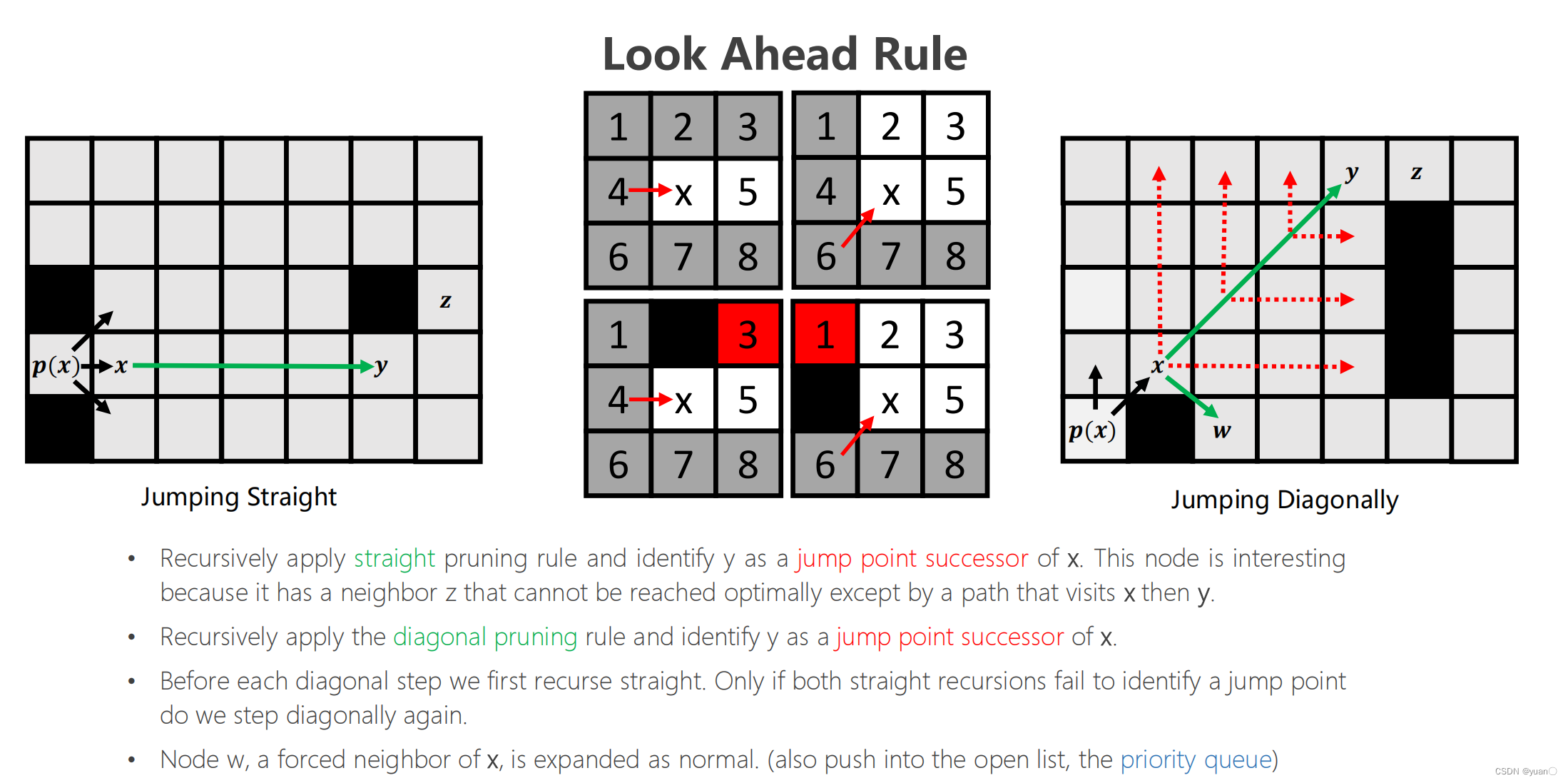
Look Ahead Rule
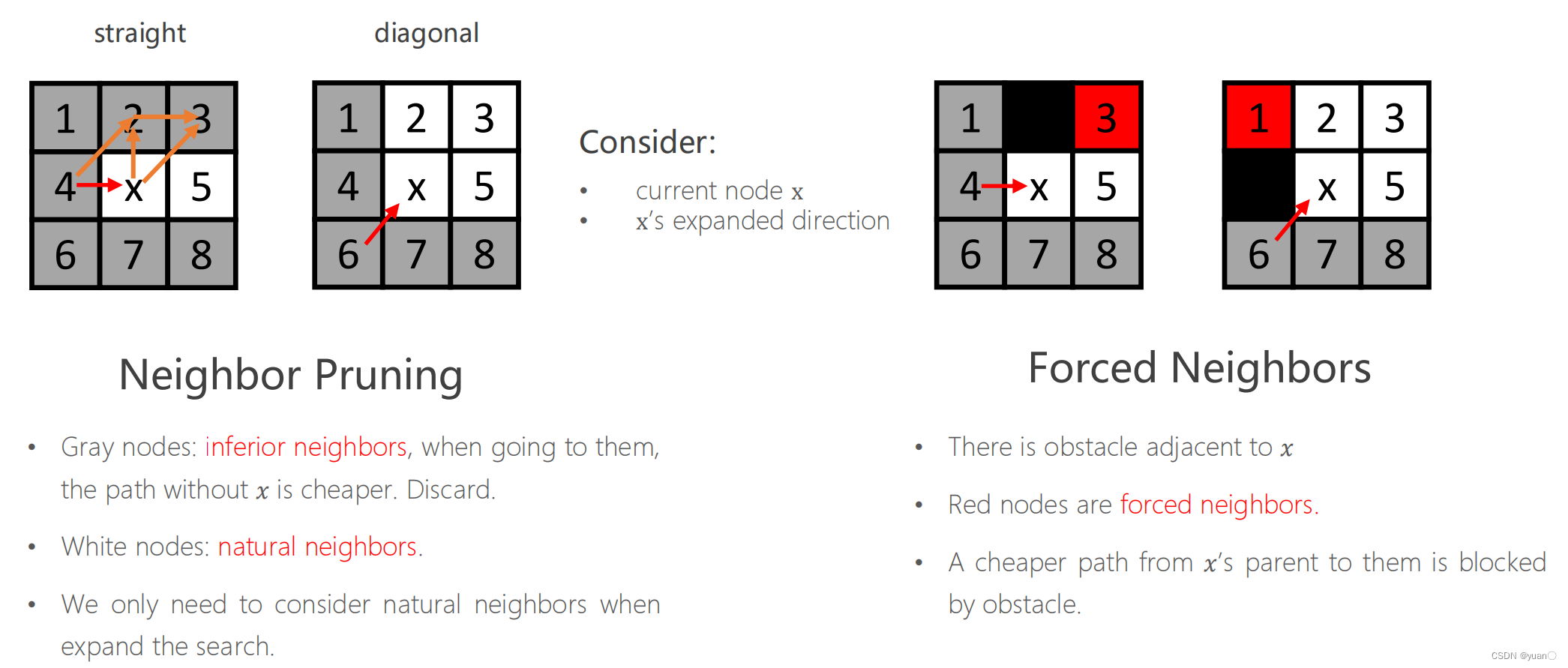
Jumping Rules
PS1:pruning rule就是 Look Ahead Rule
PS2:先走垂直方向,再走对角线
PS3:Jumping Straight情况下,移动到y时,z是y的force neighbor,可以认定y节点是关键节点,加入到openlist中;Jumping Diagonally情况下,z是一个特殊节点,具有force neighbor,返回到上一节点y,将y加入到openlist中。
示例
伪代码
与AStar的唯一的区别在于如何寻找邻居
结论
- 大多数情况下,JPS要比AStar快
- JPS减少了OpenList的节点,但增加了节点查询的代价,在部分场景会比AStar慢不少。
- JPS大多只能在结构化的地图上进行搜索。
一些问题与解决方案
本文基于ROS neotic进行相关实验(本来机子是Ubuntu18.04的,因为显卡驱动的问题,重新安装了Ubuntu20.04),和原教程相比会遇到一些问题,现给出可能遇到的问题以及相应的解决方案,也期待与大家一同解决棘手的问题,共同探讨与进步。
问题1 PCL requires C++14 or above
初次编译,遇到一系列报错,其中不乏类似于以下的内容。
/usr/include/pcl-1.10/pcl/........
error: #error PCL requires C++14 or above
问题原因:PCL版本产生的问题。对功能包CmakeLists中C++11的部分替换为C++14。主要替换的文件有 grid_path_searcher、waypoint_generator的CmakeLists.txt
# 如grid_path_searcher的CmakeLists中
set(CMAKE_CXX_FLAGS "-std=c++11 ${CMAKE_CXX_FLAGS} -O3 -Wall") # -# # Wextra -Werror
# 替换为
set(CMAKE_CXX_FLAGS "-std=c++14 ${CMAKE_CXX_FLAGS} -O3 -Wall") # -# # Wextra -Werror
再次编译,抛了一个warning
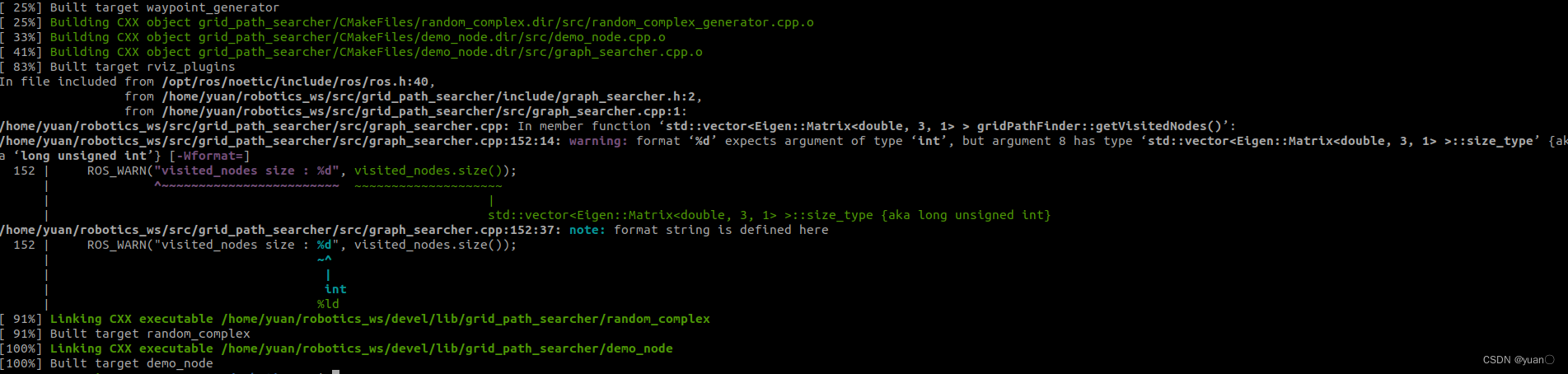
不做更改,再次编译,无误
按照步骤加载地图,如下

相关文章:
【移动机器人运动规划】01 —— 常见地图基础 |图搜索基础
文章目录 前言相关代码整理:相关文章: 可视化网址:常用地图基础Occupancy grid mapOcto-mapVoxel hashingPoint cloud mapTSDF mapESDF mapFree-space RoadmapVoronoi Diagram Map 图搜索基础配置空间图搜索基本概念DijkstraAStarAstar的一些变种&#x…...

mongotop跟踪Mongodb集合读取和写入数据
版本控制 从 MongoDB 4.4 开始,MongoDB 数据库工具现在与 MongoDB 服务器分开发布,并使用自己的版本控制,初始版本为100.0.0. 此前,这些工具与 MongoDB 服务器一起发布,并使用匹配的版本控制。 兼容性 mongotop 版本…...

Linux中使用du命令来查看目录的大小
在Linux中,你可以使用du命令来查看目录的大小。下面是一些常用的du命令选项: -h:以人类可读的格式显示文件大小。-s:仅显示总大小,而不显示每个子目录的大小。-c:显示总大小,并在最后一行显示总…...
【Linux】进程篇Ⅰ:进程信息、进程状态、环境变量、进程地址空间
文章目录 一、概述二、查看进程信息1. 系统文件夹 /proc2. 用户级工具 ps3. getpid() 函数:查看进程 PID4. 用 kill 杀进程5. 进程优先级 二、进程状态分析0. 1. R (running) 运行状态2. S (sleeping) 休眠状态3. D (disk sleep) 不可中断的休眠状态4. T (stopped) …...

保护 TDengine 查询性能——3.0 如何大幅降低乱序数据干扰?
在时序数据库(Time Series Database)场景下,乱序数据的定义为:“时间戳(timestamp)不按照递增顺序到达数据库的数据。”虽然它的定义很简单,但时序数据库需要有相应的处理逻辑来保证数据存储时的…...
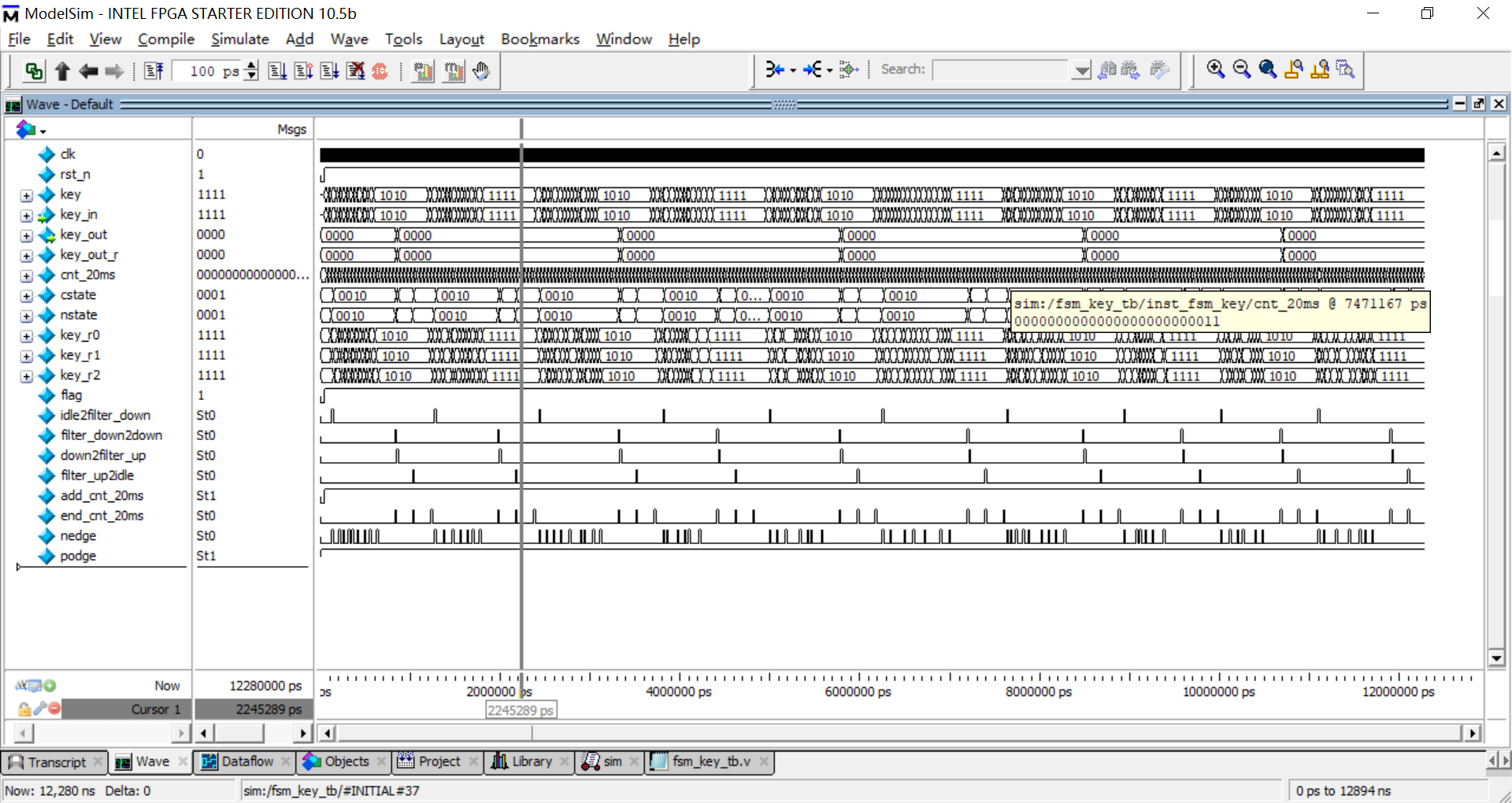
状态机实现N位按键消抖
状态机实现N位按键消抖 1、原理 利用状态机实现按键的消抖,具体的原理可参考 (50条消息) 基于FPGA的按键消抖_fpga 按键消抖_辣子鸡味的橘子的博客-CSDN博客 状态机简介: 状态机分类可以主要分为两类:moore和mealy 根据三段式状态机最后…...
uniapp自定义消息语音
需求是后端推送的消息APP要响自定义语音,利用官方插件,总结下整体流程 uniapp后台配置 因为2.0只支持uniapp自己的后台发送消息,所以要自己的后台发送消息只能用1.0 插件地址和代码 插件地址: link let isIos (plus.os.name "iOS&qu…...
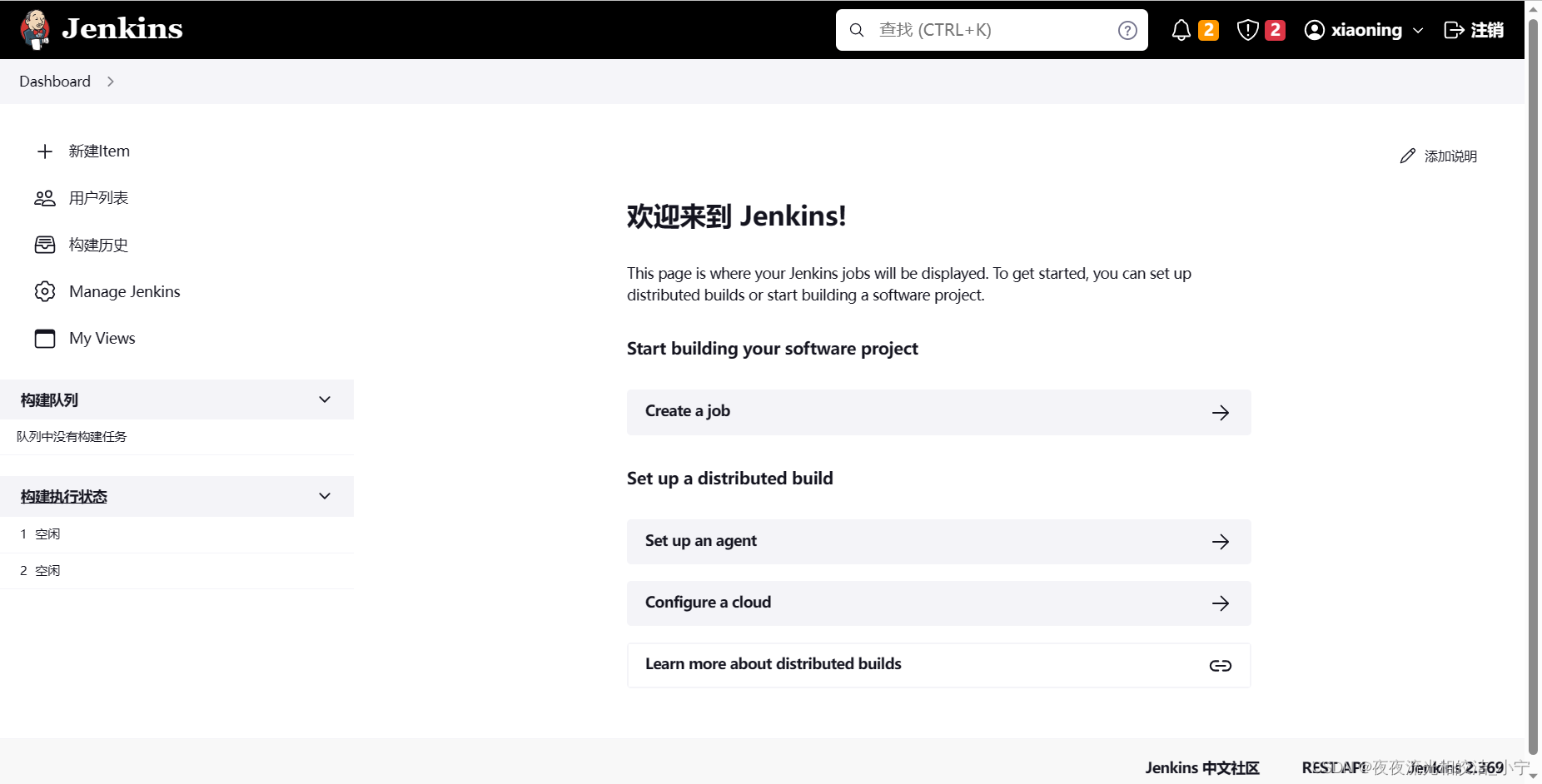
k8s安装Jenkins
目录 编辑 一、环境准备 1.1 环境说明 二、安装nfs 2.1 安装NFS 2.2 创建NFS共享文件夹 2.3 配置共享文件夹 2.4 使配置生效 2.5 查看所有共享目录 2.6 启动nfs 2.7 其他节点安装nfs-utils 三、创建PVC卷 3.1 创建namespace 3.2 创建nfs 客户端sa授权 3.3 创建…...

共筑开源新长城 龙蜥社区走进开放原子校源行-清华大学站
6 月 28 日,以“聚缘于校,开源共行”为主题的 2023 年开放原子校源行活动在清华大学成功举行。本次活动由开放原子开源基金会和清华大学共同主办,来自各行业的 22 位大咖共聚校园共话开源。龙蜥社区技术专家边子政受邀进行技术分享࿰…...
、新建分支、切换分支、代码提交))
Jgit 工具类 (代码检出、删除分支(本地、远程)、新建分支、切换分支、代码提交)
https://blog.csdn.net/qq_37203082/article/details/120327084 Jgit 工具类 (代码检出、删除分支(本地、远程)、新建分支、切换分支、代码提交)_jgit删除远程分支_CJ点的博客-CSDN博客 <!--JAVA操作GIT--><dependency><groupId>org.…...

什么是redux?如何在react 项目中使用redux?
redux 概念 redux是一种用于管理JavaScript应用程序的状态管理库。它可以与React、Augular、Vue等前端框架结合使用,但也可以纯在JavaScript应用程序中独立使用。redux遵循单项数据流的原则,通过一个全局的状态树来管理应用程序的状态,从而使…...
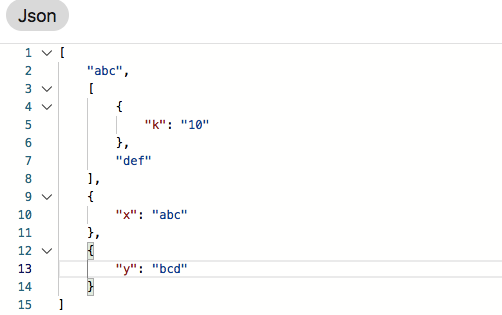
mysql的json处理
写在前面 需要注意,5.7以上版本才支持,但如果是生产环境需要使用的话,尽量使用8.0版本,因为8.0版本对json处理做了比较大的性能优化。你你可以使用select version();来查看版本信息。 本文看下MySQL的json处理。在正式开始让我们先…...
前端学习——Vue (Day8)
Vue3 create-vue搭建Vue3项目 注意要使用nodejs16.0版本以上,windows升级node可以西安使用where node查看本地node位置,然后到官网下载msi文件,在本地路径下安装即可 安装完可以使用node -v检查版本信息 项目目录和关键文件 组合式API - s…...
Windows环境下安装及部署Nginx
一、安装Nginx教程 1、官网下载地址:https://nginx.org/en/download.html 2、下载教程:选择Stable version版本下载到本地 3、下载完成后,解压放入本地非中文的文件夹中: 4、启动nginx:双击nginx.exe,若双击…...

使用AOP切面对返回的数据进行脱敏的问题
1.注解类 import java.lang.annotation.ElementType; import java.lang.annotation.Retention; import java.lang.annotation.RetentionPolicy; import java.lang.annotation.Target;/*** Author: xiaoxin* Date: 2023/7/21 17:15*/ Retention(RetentionPolicy.RUNTIME) Targe…...
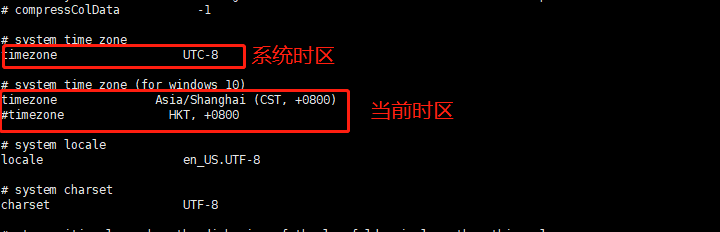
TDengine时区设置
一般来说,时序数据就是带有时间序列属性的数据。在处理时序数据时,TDengine有着自己独特的方式。但是如果没有正确理解TDengine在写入和查询上的行为,极可能会因为配置了错误的时区(timezone),而导致写入和…...

站外引流效果差?一文带你搞懂解海外主流社交媒体算法!
在流量成本越来越高的当下,无论是平台卖家还是独立站卖家都在努力拓展流量渠道。站外引流是推动业务增长的关键策略,很多卖家会把重点放在内容营销上,但其实除了做好内容之前,了解社交媒体的算法才能让营销效果最大化。 01.Faceb…...
css 动画之旋转视差
序:网上看到的一个例子,做一下 效果图: 代码: <style>.content{width: 300px;height: 300px;margin: 139px auto;display: grid;grid-template-columns: repeat(3,1fr);grid-template-rows: repeat(3,1fr);grid-template:…...
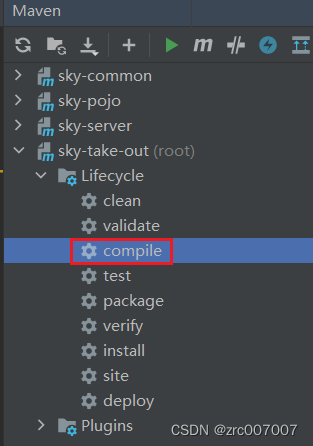
maven项目、springboot项目复制文件进来后没反应、不编译解决方法
问题如下 把文件复制进springboot项目后,没反应,不编译。 解决 在maven工具框中选择compile工具,运行即可。...
)
android jetpack App Startup 应用启动时初始化组件(java)
有什么用? 应用启动时初始化组件。 怎么用 添加依赖 dependencies {implementation "androidx.startup:startup-runtime:1.1.1" }创建类,继承Initializer。 public class AppInit implements Initializer<String> {NonNullOverride…...
)
当ESB遇上CXF:一次由Jar包冲突引发的“血案”与彻底解决指南(基于JDK rt.jar)
当ESB遇上CXF:一次由Jar包冲突引发的“血案”与彻底解决指南(基于JDK rt.jar) 在企业级系统集成领域,ESB(企业服务总线)作为核心基础设施,承担着服务解耦与协议转换的重要职责。而当我们尝试在E…...

数据治理:数据质量与元数据管理
数据治理:数据质量与元数据管理 大家好,我是欧阳瑞(Rich Own)。今天想和大家聊聊数据治理这个重要话题。作为一个全栈开发者,数据治理是确保数据资产价值的关键。今天就来分享一下数据质量和元数据管理的实战经验。 数…...
)
麦嘉昕商城软件开发(模式介绍)
编辑:SJ520it黄华麦嘉昕商城软件开发麦嘉昕商城是一个综合性电商平台,涉及商品展示、交易、支付、物流等功能。开发此类系统需要前端、后端、数据库及第三方服务(如支付、短信)的集成。技术栈建议:前端:Vue…...

3分钟搞定!GetQzonehistory教你永久保存QQ空间青春回忆
3分钟搞定!GetQzonehistory教你永久保存QQ空间青春回忆 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 还在担心那些承载着青春记忆的QQ空间说说会消失吗?GetQzo…...

RTB点击率预估中的长尾失衡与价值重标定
1. 项目概述:当广告竞价遇上“长尾陷阱”——为什么实时竞价系统里99%的流量不说话,却决定着100%的效果你有没有遇到过这样的情况:训练了一个看起来AUC高达0.92的点击率预估模型,上线后CTR却比老模型还低0.3个百分点?或…...

DataRoom开源大屏设计器:零代码打造专业数据可视化大屏的终极指南
DataRoom开源大屏设计器:零代码打造专业数据可视化大屏的终极指南 【免费下载链接】DataRoom 🔥基于SpringBoot、MyBatisPlus、ElementUI、G2Plot、Echarts等技术栈的大屏设计器,具备目录管理、DashBoard设计、预览能力,支持MySQL…...

SNK施努卡铜箔包装线:从拔轴到入库,全流程自动化怎么实现?
在锂电铜箔生产中,生箔机产出的铜箔卷需要经过裁切、拔轴、包装、入库等多个环节。传统方式下,拔轴依靠人力或简易机械,包装过程需要多人配合搬运、开箱、投干燥剂、合盖捆扎,不仅效率低,而且容易损伤铜箔边缘…...

暗黑2存档编辑器实战指南:免费Web工具深度解析与操作手册
暗黑2存档编辑器实战指南:免费Web工具深度解析与操作手册 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor 想要在暗黑破坏神2中测试各种强力Build,却不想花费数百小时刷装备?渴望体验不同角色配…...

利用 Taotoken 用量看板精细化追踪与管理 API 成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用 Taotoken 用量看板精细化追踪与管理 API 成本 对于依赖大模型 API 进行开发的项目管理者或独立开发者而言,成本控…...

QMCDecode:3步解锁QQ音乐加密音频的终极macOS工具
QMCDecode:3步解锁QQ音乐加密音频的终极macOS工具 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默认转换结…...