GDAL OGR C++ API 学习之路 (5)OGRLayer篇 代码示例
GetStyleTable
virtual OGRStyleTable *GetStyleTable ()
返回图层样式表
返回: 指向不应由调用方修改或释放的样式表的指针
// 假设图层对象为 poLayer
OGRStyleTable* poStyleTable = poLayer->GetStyleTable();
if (poStyleTable != nullptr) {// 处理样式表信息// ...
} else {// 图层没有关联样式表// ...
}SetStyleTableDirect
virtual void SetStyleTableDirect(OGRStyleTable *poStyleTable )
设置图层样式表
参数:
poStyleTable -- 指向要设置的样式表的指针
// 假设图层对象为 poLayer,样式表对象为 poStyleTable
poLayer->SetStyleTableDirect(poStyleTable);StartTransaction
Virtual OGRErr StartTransaction()
对于支持事务的数据源,StartTransaction 会创建一个事务
返回: OGRERR_NONE成功
// 假设图层对象为 poLayer
if (poLayer->StartTransaction() == OGRERR_NONE) {// 在事务中进行一系列操作// ...// 提交事务poLayer->CommitTransaction();
} else {// 处理事务启动失败的情况
}在 OGR 中,图层可以支持事务,通过调用
StartTransaction()可以在图层中开始一个事务。在事务中,可以进行一系列的图层操作,例如添加要素、修改要素、删除要素等。当所有的操作都执行完成后,可以调用CommitTransaction()来提交事务,表示所有操作都成功执行。如果在事务过程中出现了错误,可以调用RollbackTransaction()来回滚事务,表示撤销之前的所有操作
CommitTransaction
virtual OGRErr CommitTransaction()
对于支持事务的数据源,提交事务提交事务
返回: OGRERR_NONE成功
RollbackTransaction
Virtual OGRErr RollbackTransaction()
对于支持事务的数据源,RollbackTransaction 会将数据源回滚到当前事务开始之前的状态
返回: OGRERR_NONE成功
// 获取第一个图层OGRLayer* poLayer = poDS->GetLayer(0);// 开始事务poDS->StartTransaction();// 创建新要素OGRFeature* poFeature = new OGRFeature(poLayer->GetLayerDefn());// 设置要素属性poFeature->SetField("name", "New Feature");poFeature->SetField("population", 10000);// 创建新几何图形并设置为要素的几何图形OGRPoint point(100, 200);poFeature->SetGeometry(&point);// 将新要素添加到图层中if (poLayer->CreateFeature(poFeature) != OGRERR_NONE) {printf("添加要素失败!\n");poDS->RollbackTransaction(); // 回滚事务,撤销之前的操作OGRDataSource::DestroyDataSource(poDS);delete poFeature;exit(1);}// 提交事务,保存更改poDS->CommitTransaction();GetFIDColumn
virtual const char *GetFIDColumn()
此方法返回用作 FID 列的基础数据库列的名称,如果不支持,则返回 ""
返回: FID 列名称
// 获取第一个图层OGRLayer* poLayer = poDS->GetLayer(0);// 获取用于唯一标识要素的字段的名称const char* fid_column = poLayer->GetFIDColumn();if (fid_column != nullptr) {printf("用于唯一标识要素的字段名称:%s\n", fid_column);} else {printf("图层中没有用于唯一标识要素的字段。\n");}GetGeometryColumn
virtual const char *GetGeometryColumn()
此方法返回用作几何列的基础数据库列的名称,如果不支持,则返回 “”
对于具有多个几何字段的图层,此方法仅返回第一个几何列的名称
返回: 几何列名称
// 获取第一个图层OGRLayer* poLayer = poDS->GetLayer(0);// 获取存储几何信息的字段的名称const char* geometry_column = poLayer->GetGeometryColumn();if (geometry_column != nullptr) {printf("存储几何信息的字段名称:%s\n", geometry_column);} else {printf("图层中没有存储几何信息的字段。\n");}SetIgnoredFields
virtual OGRErr SetIgnoredFields(const char **papszFields)
设置从图层检索要素时可以省略的字段
参数:
papszFields -- 以 NULL 项结尾的字段名称数组。如果传递 NULL,则清除忽略的列表。
返回: OGRERR_NONE是否已解析所有字段名称(即使驱动程序不支持此方法)
// 获取第一个图层OGRLayer* poLayer = poDS->GetLayer(0);// 定义要忽略的字段数组const char* papszFields[] = {"field1", "field2"};// 设置要忽略的字段OGRErr err = poLayer->SetIgnoredFields(papszFields);if (err != OGRERR_NONE) {// 处理设置忽略字段时发生的错误}// 其他处理代码...GetIgnoredFields可以拿到忽略字段列表
// 获取当前设置的忽略字段列表char** papszIgnoredFields = poLayer->GetIgnoredFields();// 打印忽略字段列表for (int i = 0; papszIgnoredFields[i] != nullptr; i++) {printf("Ignored Field: %s\n", papszIgnoredFields[i]);}GetGeometryTypes
virtual OGRGeometryTypeCounter *GetGeometryTypes(int iGeomField, int nFlagsGGT, int &nEntryCountOut, GDALProgressFunc pfnProgress, void *pProgressData)
获取在要素中找到的实际几何类型
参数:
-
iGeomField -- 几何字段索引。
-
nFlagsGGT -- 提示标志。0 或 OGR_GGT_COUNT_NOT_NEEDED、OGR_GGT_STOP_IF_MIXED、OGR_GGT_GEOMCOLLECTIONZ_TINZ的组合
-
nEntryCountOut -- [out] 返回数组中的条目数。
-
pfnProgress-- 取消回调。可能为空。
-
pProgressData -- 取消回调的用户数据。可能为空。
返回: 一个 nEntryCount 数组,如果出现错误,必须使用 CPLFree() 或 NULL 释放
Intersection
OGRErr Intersection(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions = nullptr, GDALProgressFunc pfnProgress = nullptr, void *pProgressArg = nullptr)
两层的交集
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回:
如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
Union
OGRErr Union(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions = nullptr, GDALProgressFunc pfnProgress = nullptr, void *pProgressArg = nullptr)
两层并集
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL。
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回:
如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
// 获取输入图层和输出图层
OGRLayer* pLayer1 = poInputDS->GetLayer(0);
OGRLayer* pLayer2 = poInputDS->GetLayer(1);
OGRLayer* pLayerResult = poOutputDS->CreateLayer("SymDifference_Result", nullptr, wkbUnknown, nullptr);// 计算几何形状的对称差并将结果写入输出图层
OGRErr err = pLayer1->Union(pLayer2, pLayerResult, nullptr, nullptr, nullptr);// 保存并关闭结果图层
pLayerResult->SyncToDisk();SymDifference
OGRErr SymDifference(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions, GDALProgressFunc pfnProgress, void *pProgressArg)
两层对称差异(交集取反)
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL。
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回:
如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
// 获取输入图层和输出图层
OGRLayer* pLayer1 = poInputDS->GetLayer(0);
OGRLayer* pLayer2 = poInputDS->GetLayer(1);
OGRLayer* pLayerResult = poOutputDS->CreateLayer("SymDifference_Result", nullptr, wkbUnknown, nullptr);// 计算几何形状的对称差并将结果写入输出图层
OGRErr err = pLayer1->SymDifference(pLayer2, pLayerResult, nullptr, nullptr, nullptr);// 保存并关闭结果图层
pLayerResult->SyncToDisk();Identity
OGRErr Identity(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions = nullptr, GDALProgressFunc pfnProgress = nullptr, void *pProgressArg = nullptr)
将此图层的特征与标识层中的特征标识
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL。
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回:
如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
// 获取输入图层和输出图层
OGRLayer* pLayer1 = poInputDS->GetLayer(0);
OGRLayer* pLayer2 = poInputDS->GetLayer(1);
OGRLayer* pLayerResult = poOutputDS->CreateLayer("Identity_Result", nullptr, wkbUnknown, nullptr);// 计算几何形状的恒等并将结果写入输出图层
OGRErr err = pLayer1->Identity(pLayer2, pLayerResult, nullptr, nullptr, nullptr);// 保存并关闭结果图层
pLayerResult->SyncToDisk();Update
OGRErr Update(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions = nullptr, GDALProgressFunc pfnProgress = nullptr, void *pProgressArg = nullptr)
使用更新图层中的要素更新此图层
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL。
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回:
如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
// 获取输入图层和输出图层
OGRLayer* pLayer1 = poInputDS->GetLayer(0);
OGRLayer* pLayer2 = poInputDS->GetLayer(1);
OGRLayer* pLayerResult = poOutputDS->CreateLayer("SymDifference_Result", nullptr, wkbUnknown, nullptr);// 计算几何形状的对称差并将结果写入输出图层
OGRErr err = pLayer1->Update(pLayer2, pLayerResult, nullptr, nullptr, nullptr);// 保存并关闭结果图层
pLayerResult->SyncToDisk();Clip
OGRErr Clip(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions = nullptr, GDALProgressFunc pfnProgress = nullptr, void *pProgressArg = nullptr)
裁剪方法图层未覆盖的区域
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL。
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回:如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
// 获取输入图层和输出图层
OGRLayer* pLayer1 = poInputDS->GetLayer(0);
OGRLayer* pLayer2 = poInputDS->GetLayer(1);
OGRLayer* pLayerResult = poOutputDS->CreateLayer("SymDifference_Result", nullptr, wkbUnknown, nullptr);// 计算几何形状的对称差并将结果写入输出图层
OGRErr err = pLayer1->Clip(pLayer2, pLayerResult, nullptr, nullptr, nullptr);// 保存并关闭结果图层
pLayerResult->SyncToDisk();Erase
OGRErr Erase(OGRLayer *pLayerMethod, OGRLayer *pLayerResult, char **papszOptions = nullptr, GDALProgressFunc pfnProgress = nullptr, void *pProgressArg = nullptr)
移除方法图层覆盖的区域
参数:
-
pLayerMethod -- 方法层。不应为 NULL。
-
pLayerResult -- 插入操作生成的要素的图层。不应为 NULL。
-
papszOptions -- NULL 终止的选项列表(可能为 NULL)。
-
pfnProgress -- 一个与 GDALProgressFunc() 兼容的回调函数,用于报告进度或 NULL。
-
pProgressArg -- 要传递给 pfnProgress 的参数。可能为空。
返回: 如果出现错误或执行中断,则为错误代码,否则OGRERR_NONE
// 获取输入图层和输出图层
OGRLayer* pLayer1 = poInputDS->GetLayer(0);
OGRLayer* pLayer2 = poInputDS->GetLayer(1);
OGRLayer* pLayerResult = poOutputDS->CreateLayer("SymDifference_Result", nullptr, wkbUnknown, nullptr);// 计算几何形状的对称差并将结果写入输出图层
OGRErr err = pLayer1->Erase(pLayer2, pLayerResult, nullptr, nullptr, nullptr);// 保存并关闭结果图层
pLayerResult->SyncToDisk();Reference
int Reference()
递增图层引用计数
返回:递增后的引用计数
Dereference
int Dereference()
递减图层参考计数
返回:递减后的引用计数
ReorderField
OGRErr ReorderField(int iOldFieldPos, int iNewFieldPos)
对图层上的现有字段重新排序
参数:
-
iOldFieldPos -- 要移动的字段的先前位置。必须在 [0,GetFieldCount()-1] 范围内。
-
iNewFieldPos -- 要移动的字段的新位置。必须在 [0,GetFieldCount()-1] 范围内。
返回: OGRERR_NONE成功
// 获取输入图层
OGRLayer* pLayer = poInputDS->GetLayer(0);// 获取字段总数
int fieldCount = pLayer->GetLayerDefn()->GetFieldCount();// 假设我们要将第1个字段移动到第3个位置
int oldFieldPos = 0; // 第1个字段的位置(索引从0开始)
int newFieldPos = 2; // 新的位置(索引从0开始)if (oldFieldPos < 0 || oldFieldPos >= fieldCount || newFieldPos < 0 || newFieldPos >= fieldCount) {// 检查字段位置是否有效// 可以根据需要添加其他错误处理逻辑return OGRERR_FAILURE;
}// 重新排列字段
OGRErr err = pLayer->ReorderField(oldFieldPos, newFieldPos);
if (err != OGRERR_NONE) {// 重新排列失败,可以根据需要添加错误处理逻辑return err;
}// 保存并关闭数据源
pLayer->SyncToDisk();相关文章:
OGRLayer篇 代码示例)
GDAL OGR C++ API 学习之路 (5)OGRLayer篇 代码示例
GetStyleTable virtual OGRStyleTable *GetStyleTable () 返回图层样式表 返回: 指向不应由调用方修改或释放的样式表的指针 // 假设图层对象为 poLayer OGRStyleTable* poStyleTable poLayer->GetStyleTable(); if (poStyleTable ! nullptr) {// 处理样式表信息// ..…...
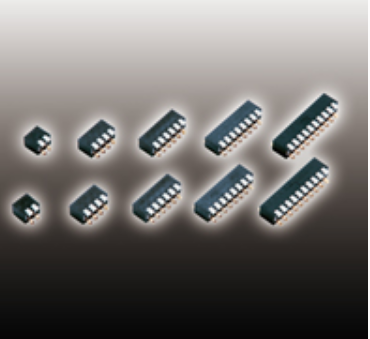
NIDEC COMPONENTS尼得科科宝滑动型DIP开关各系列介绍
今天AMEYA360对尼得科科宝电子滑动型DIP开关各系列参数进行详细介绍,方便大家选择适合自己的型号。 系列一、滑动型DIP开关 CVS 针脚数:1, 2, 3, 4, 8 安装类型:表面贴装,通孔 可水洗:无 端子类型:PC引脚(只…...
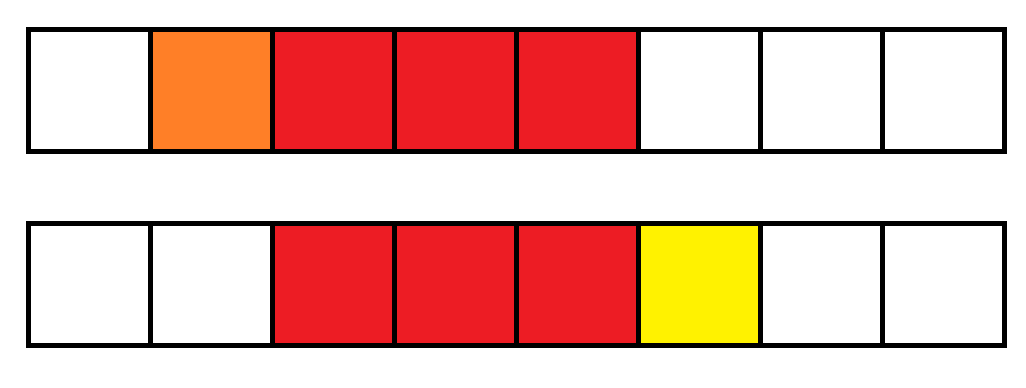
一起学算法(滑动窗口篇)
前言: 对于滑动窗口,有长度固定的窗口,也有长度可变的窗口,一般是基于数组进行求解,对于一个数组中两个相邻的窗口,势必会有一大部分重叠,这部分重叠的内容是不需要重复计算的,所以我…...

HTML <q> 标签
实例 标记短的引用: <q>Here is a short quotation here is a short quotation</q>浏览器支持 元素ChromeIEFirefoxSafariOpera<q>YesYesYesYesYes所有浏览器都支持 <q> 标签。 定义和用法 <q> 标签定义短的引用。 浏览器经常在引用的内容…...

机器学习02-再识K邻近算法(自定义数据集训练及测试)
定义: 如果一个样本在特征空间中的k个最相似(即特征空间中最邻近)的样本中的大多数属于某一个类别,则该样本也属于这个类别。简单的说就是根据你的“邻居”来推断出你的类别。 用个成语就是物以类聚 思想: 如果一个样本在特征空间中的K个最…...

github使用笔记及git协作常用命令
1.Github有一个主库,每个人自己也有一个库,称为分支。 2.Github的协作流程:先从主库fork出自己的分支, 然后进行代码的修改等操作, 操作完之后从本地库上推到自己的服务器分支,然后 服务器分支Pull Request到 主库。 3.本地仓库由git维护的三棵“树"组成:第1个…...

iOS - Apple开发者账户添加新测试设备
获取UUID 首先将设备连接XCode,打开Window -> Devices and Simulators,通过下方位置查看 之后登录(苹果开发者网站)[https://developer.apple.com/account/] ,点击设备 点击加号添加新设备 填写信息之后点击Continue,并一路继续…...

vue 前端 邮箱、密码、手机号码等输入验证规则
最近在写前端表单验证的时候,发现一篇文章质量很好,所以写下这篇文章记录 原文章链接:vue 邮箱、密码、手机号码等输入验证规则 1.手机号 const checkPhone (rule, value, callback) > {const phoneReg /^1[34578]\d{9}$$/;if (!value…...

如何看待前端已死这个问题(大学生篇)
小编刚大学毕业,还记得是大三的时候选择的前端开发方向,那个时候行情其实并没有这么差,最近互联网上讨论这一个很火的话题,叫前端已死。那么我就说说我的看法吧,虽然可能比起行业的大佬会比较短浅,但我想就…...
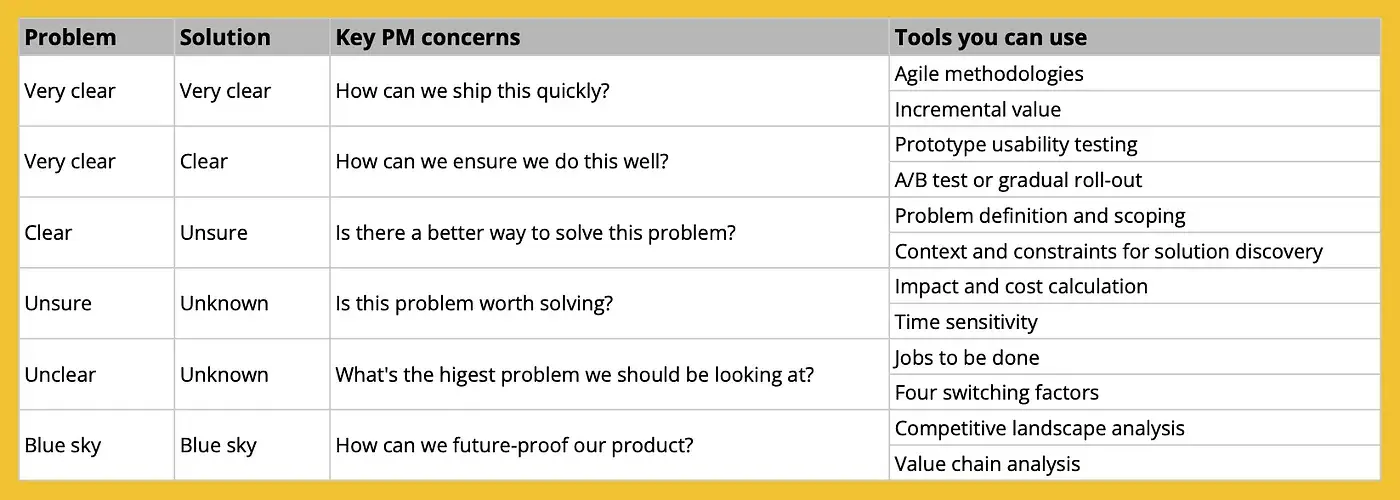
揭开高级产品经理思维的秘密
我经常被问到产品经理如何晋升到更高级别。事实上,获得晋升往往是一场复杂的游戏。是的,你的技能和成就很重要,但其他因素也很重要,比如你的经理对人才培养的关心程度、你的同事有多优秀、任期有多长、公司的政治氛围如何等等。 所…...

Java 学习路线图
以下是 Java 学习路线图的大致概述: Java 基础语法和面向对象编程(OOP):包括数据类型、控制流、数组、类和对象、继承、多态、抽象类和接口等。 Java 集合框架:包括集合和 Map 等常用数据结构的使用和操作。 Java I/…...

在springboot项目中使用策略工厂模式
在springboot项目中使用策略工厂模式 策略接口类 package cn.test.ext;public interface ITestStrategy {void execTestMethod(); }策略实现类 package cn.test.ext.beanlife;import cn.test.ext.ITestStrategy; import cn.test.ext.MyStrategyFactory; import lombok.exter…...
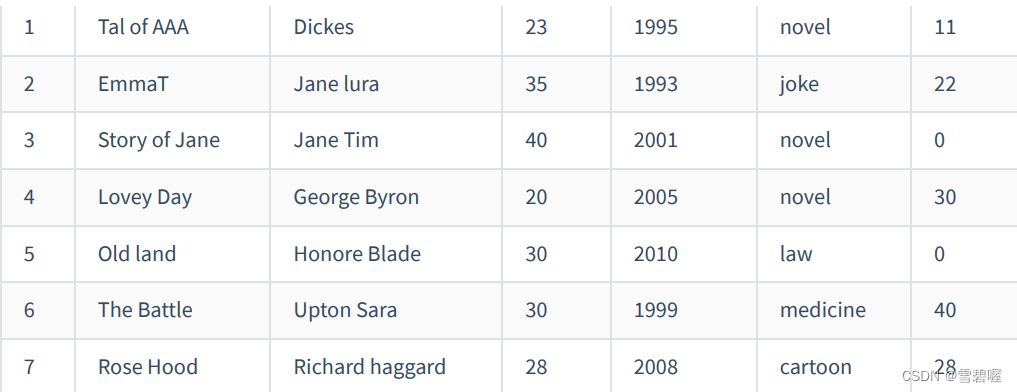
mysql综合练习语法总结
mysql综合练习 用于 小白练手的主要用于以后语法忘了回来看 题目 # 1、创建数据库test01_library # 2、创建表 books,表结构如下:# 3、向books表中插入记录 # 1)不指定字段名称,插入第一条记录 # 2)指定所有字段名…...

统计神经网络参数量、MAC、FLOPs等信息
0、基础提示 1、FLOPS是用来衡量硬件算力的指标,FLOPs用来衡量模型复杂度。 2、MAC 一般为 FLOPs的2倍 3、并非FLOPs越小在硬件上就一定运行更快,还与模型占用的内存,带宽,等有关 1、FLOPs计算 神经网络参数量。用于衡量模型大…...
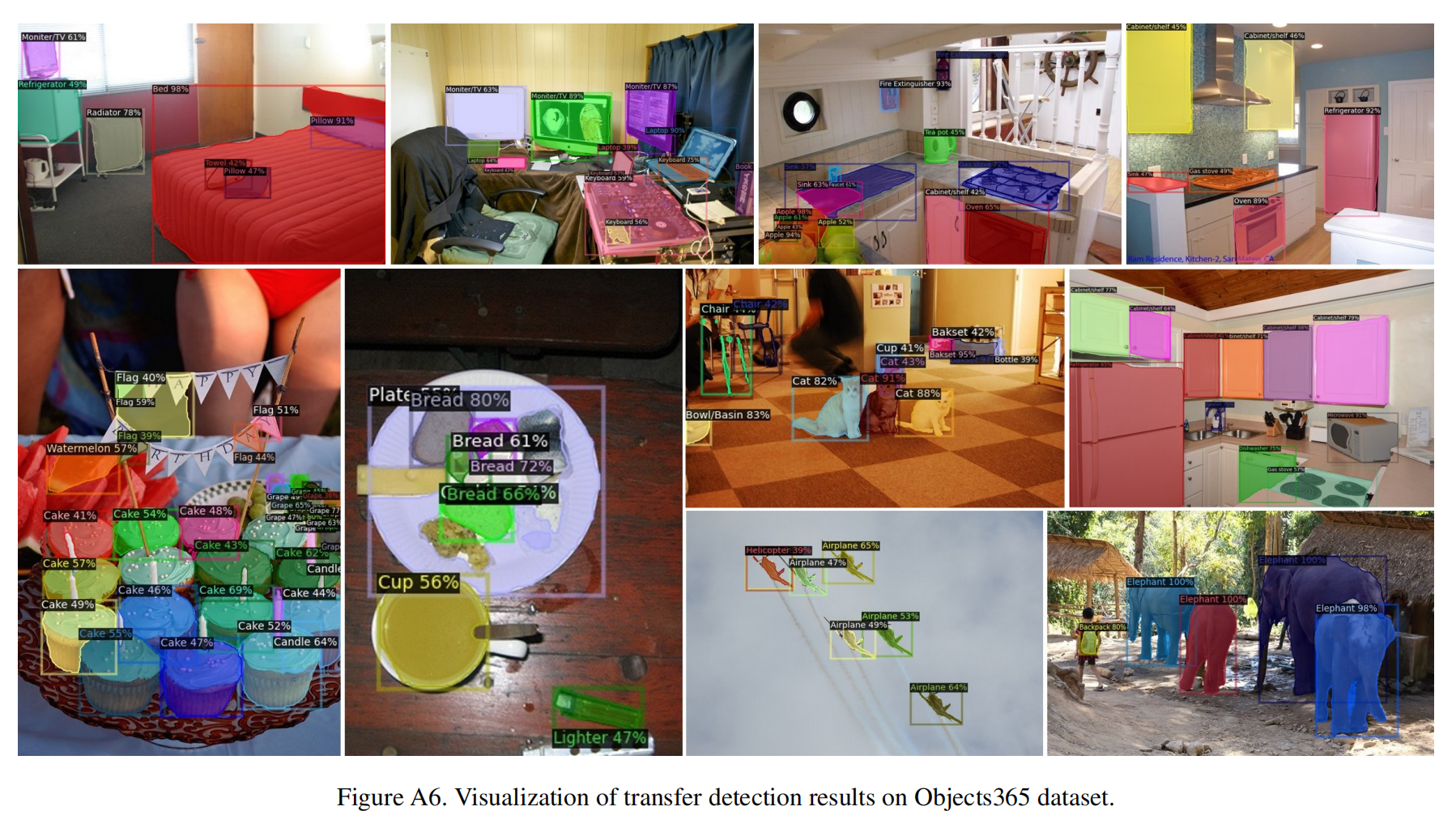
【多模态】21、BARON | 通过引入大量 regions 来提升模型开放词汇目标检测能力(CVPR2021)
文章目录 一、背景二、方法2.1 主要过程2.2 Forming Bag of Regions2.3 Representing Bag of Regions2.4 Aligning bag of regions 三、效果 论文:Aligning Bag of Regions for Open-Vocabulary Object Detection 代码:https://github.com/wusize/ovdet…...
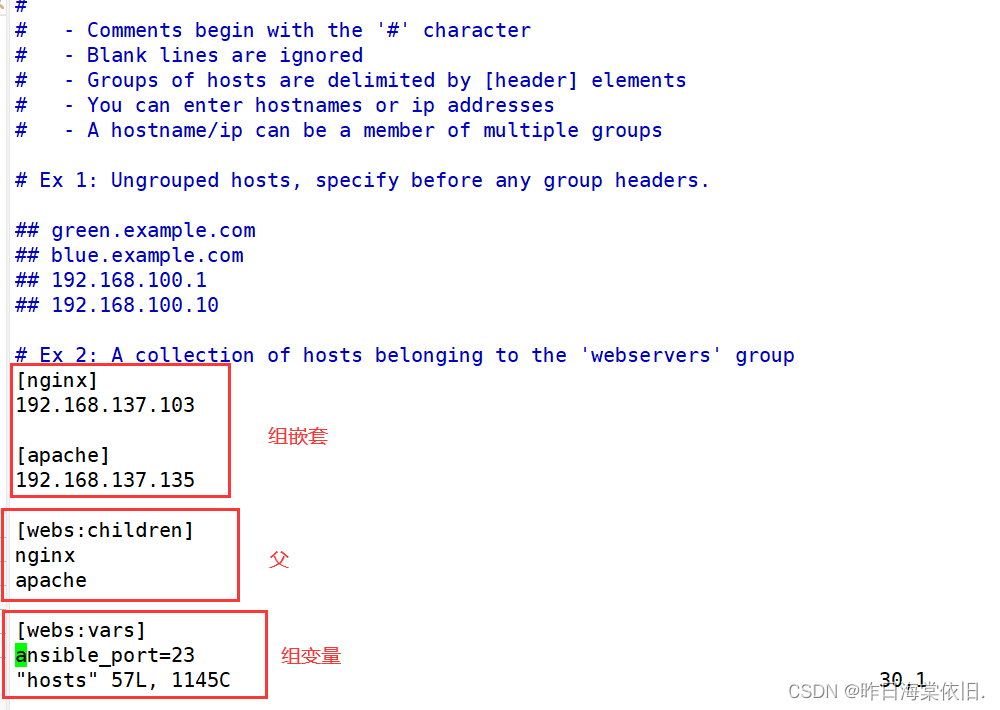
Ansible 自动化运维
目录 ansible 环境安装部署ansible 命令行模块inventory 主机清单 Ansible是一个基于Python开发的配置管理和应用部署工具,现在也在自动化管理领域大放异彩。它融合了众多老牌运维工具的优点,Pubbet和Saltstack能实现的功能,Ansible基本上都可…...

指纹浏览器能为TikTok运营提供哪些便利?
TikTok是一个非常垂直的平台,每个账号的内容都应尽可能保持垂直,这样平台才会给予更多的流量。有运营经验的TikTok用户一般会经营多个账号,从而获取更多的收益。指纹浏览器作为一种新型浏览器,它的优势不可否认。那么指纹浏览器能…...
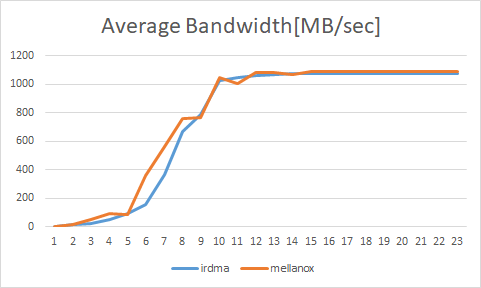
关于远程直接内存访问技术 RDMA 的高性能架构设计介绍 | 龙蜥技术
编者按:传统以太网方案存在系统调用消耗大量时间、增加数据传输延时、对 CPU 造成很重的负担三个缺点,而 RDMA 技术可以解决以上三个缺点。那 RDMA 究竟是什么?它的方案的设计思路是什么?今天,浪潮信息驱动工程师刘伟带…...
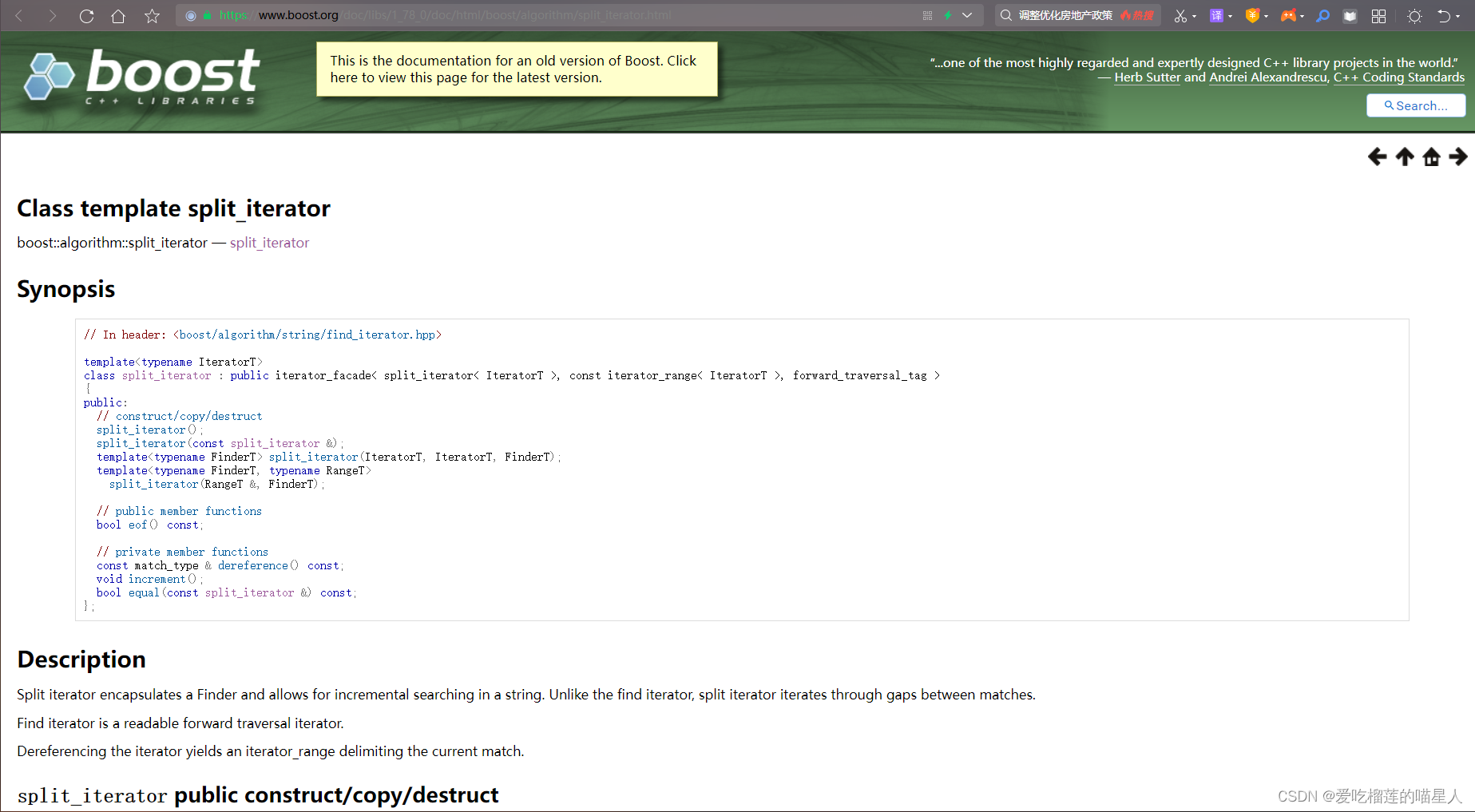
【Boost搜索引擎项目】
文章目录 一、项目流程二、项目展示 一、项目流程 1.编写数据去标签模块–parser.cc 将去标签之后干净文档以title\3content\3url\ntitle\3content\3url\n格式放入同一文件中。 2.建立索引模块–index.hpp 读取处理好的行文本文件进行分词、权重计算等操作,在内存中…...
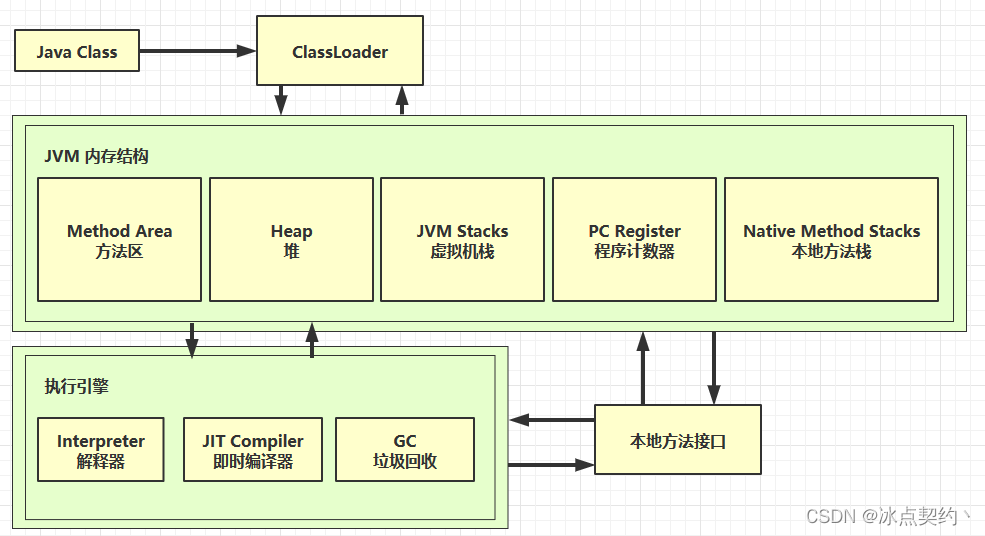
JVM入门篇-JVM的概念与学习路线
JVM入门篇-JVM的概念与学习路线 什么是 JVM 定义 Java Virtual Machine - java 程序的运行环境(java 二进制字节码的运行环境) 好处 一次编写,到处运行自动内存管理,垃圾回收功能数组下标越界检查多态 比较 jvm jre jdk 常…...

蒙特卡洛学习:基于完整轨迹的无偏强化学习方法
1. 这不是数学推导课,而是一次“试错式决策”的实战复盘你有没有过这种体验:第一次进一家陌生餐厅,菜单没看懂,服务员语速太快,你点完菜后心里直打鼓——这道招牌菜到底合不合口味?等上菜、尝第一口、皱眉或…...

Java编程入门科普:从“一杯咖啡”到亿万应用
在数字化时代,我们每天都在与Java打交道:刷手机时的Android APP、逛电商时的后台系统、银行转账的安全校验、甚至智能家居的控制程序,背后都有Java的身影。作为一门诞生近30年仍稳居热门的编程语言,它不仅是程序员的“入门优选”&…...

Nexus Mods App终极指南:5分钟掌握专业游戏模组管理
Nexus Mods App终极指南:5分钟掌握专业游戏模组管理 【免费下载链接】NexusMods.App Home of the development of the Nexus Mods App 项目地址: https://gitcode.com/gh_mirrors/ne/NexusMods.App Nexus Mods App是一款革命性的游戏模组管理工具,…...

告别手动对照!用OrCAD Design Sync功能,5分钟自动化同步你的原理图与Allegro PCB变更
告别手动对照!用OrCAD Design Sync功能,5分钟自动化同步你的原理图与Allegro PCB变更 在高速迭代的电子设计领域,每一次原理图修改都可能引发PCB布局的连锁反应。传统手动同步方式不仅耗时费力,还容易遗漏关键变更。OrCAD Design…...

Tensor Comprehensions部署指南:Docker、Conda和源码编译三种方式
Tensor Comprehensions部署指南:Docker、Conda和源码编译三种方式 【免费下载链接】TensorComprehensions A domain specific language to express machine learning workloads. 项目地址: https://gitcode.com/gh_mirrors/te/TensorComprehensions Tensor C…...
)
【Game】Powerful——Martial Arts Challenge(6)
文章目录攻略关卡一(虎子)关卡二关卡三关卡四关卡五关卡六——奇穷妖魔羽灵火地仙人雷攻略 关卡一(虎子) 参战选手 出手顺序 关卡二 参战选手 出手顺序 关卡三 参战选手 出手顺序 上面是追求极限,但是没有容错率&…...

终极指南:如何使用qmc-decoder快速解密QMC音频文件 [特殊字符]
终极指南:如何使用qmc-decoder快速解密QMC音频文件 🎵 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder qmc-decoder是一款专为QQ音乐用户设计的QMC音…...

如何高效批量下载抖音无水印视频:开源工具完整实战指南
如何高效批量下载抖音无水印视频:开源工具完整实战指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback supp…...

终极指南:ViGEmBus虚拟游戏控制器驱动,Windows游戏输入革命性解决方案
终极指南:ViGEmBus虚拟游戏控制器驱动,Windows游戏输入革命性解决方案 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 想要在Windows…...

Unity场景文件本质解析:YAML序列化与Git工程化实践
1. 场景文件不是“点开就跑”的黑盒子,而是 Unity 项目的数据心脏很多人刚接触 Unity,把 .unity 场景文件当成一个“打包好的游戏画面快照”——双击就打开,拖拽就编辑,保存就生效。直到某天场景打不开、Prefab 变成粉红色、或者 …...