容灾独家技术揭秘:HyperBDR无主机数据同步技术
01、一对一单机热备-传统灾备方式
单机热备是一种备份解决方案,它使用两台服务器来确保高可用性,是市场上最为常见的灾备模式。 在单机热备中,一台主服务器和一台备用服务器保持同步,以确保在主服务器出现故障或宕机时可以立即切换到备用服务器上。这可以确保系统的连续性和可靠性,并降低业务中断和数据丢失的风险。
具体来说,立即接管的时间取决于备用系统的准备情况和自动化程度。在一些高度自动化的备份系统中,立即接管可能只需要几秒钟时间,而在一些较少自动化的备份系统中,可能需要几分钟到几小时的时间。总体来说,立即接管的目标是尽可能快地将备份系统转换为先前故障的系统,以确保业务的连续性和用户体验。
02、多对一/无主机热备-HyperBDR独家技术
多对一主机热备和无主机热备是万博智云独有的云原生自动化容灾技术,和单机热备相比,在数据同步阶段,它不再需要在目标平台1:1配置备用主机用于数据同步,只需要利用云平台接口能力及原生资源特性,将源端数据通过点到点加密网络传输至目标云侧,只有在业务接管时才利用云原生能力创建备份主机资源,在满足业务连续性要求的同时,大幅降低计算资源消耗,使得容灾普惠成为可能。
具体来说,HyperBDR针对不同的业务需求,可选择采用块存储或者对象存储作为备份介质,满足不同级别的灾备需求。当然,因此也会使得云端存储的费用不同。
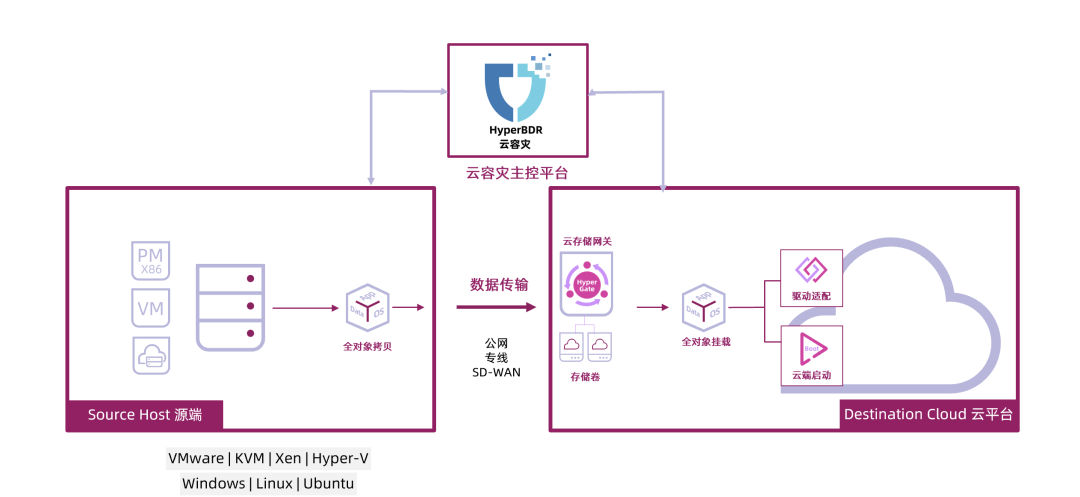
1、多对一主机热备-云硬盘模式
万博智云HyperBDR容灾软件通过调用云平台自身提供的原生API接口,以及通过调度源端Agent、Agentless程序来捕获块级别全量、增量数据,通过点到点加密网络传输至目标云侧「云存储网关」,本地没有数据留存,安全高效,再由云存储网关将数据写入目标端云盘进行备份。
当生产系统的数据出现损坏时,用户选择待恢复还原的历史时间,找到云盘中对应的副本数据,生成虚拟克隆卷,分钟级挂载恢复到容灾主机,快速恢复业务。
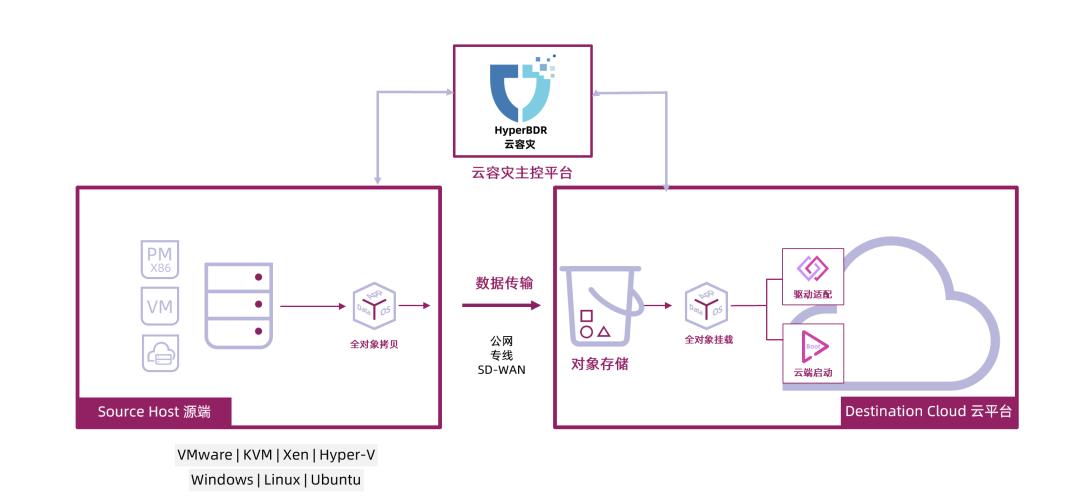
2、多对一主机热备-对象存储模式
万博智云HyperBDR容灾产品也支持将块级别全量和差量数据切片备份至对象存储方式,在这种场景下,HyperBDR不再需要利用容灾平台的任何计算资源。通过调用对象存储标准S3 API接口,将全量和增量数据存储于对象存储的指定存储桶(Bucket)中,同时,可以根据设置的备份策略,产生多个带有时间点属性的副本,用户可以利用这些快照时间点进行业务系统整体恢复。
当生产系统出现故障后,用户选择待恢复的时间点,利用云平台API的编排能力将数据从对象存储中还原至块存储后,再挂载恢复到容灾主机,快速恢复业务。
3、多对一主机热备和无主机热备模式的差异
1)RTO差异:
在备份和恢复过程中,数据的压缩和存储处理也会影响RTO,由于对象存储模式需要将数据从块存储转换为对象存储进行存储,在启动业务恢复时才还原至块存储,这个还原过程这势必会增加数据处理的时间,从而延长恢复时间。
2)成本差异:
| 块存储模式 | 备份成本 | 云存储网关(ECS主机)的订阅费 | 云硬盘的订阅费用 |
| 恢复和演练成本 | 恢复和演练所按需订阅的ECS主机费用 | ||
| 对象存储模式 | 备份成本 | 对象存储的订阅费用 | |
| 恢复和演练成本 | 恢复和演练所按需订阅的ECS主机费用 | ||
可以看出,两种模式下,主要的差异在备份成本部分,由于对象存储的低廉成本,模式二的备份(存储)成本比模式一下降90%左右。
03、无主机热备的市场机会
对比传统单机设备,万博智云的两种灾备模式,在灾备数据存储成本上实现了大幅降低,而RTO时间仍然可以保持较高水平。
| 灾备模式 | 云灾备数据存储成本 | 业务恢复RTO时间 |
| 单机热备 | 约为生产环境150% | 秒级~分钟级别 |
| 多对一主机热备 | 约为生产环境30% | 分钟级别(与云平台有关,最低为5分钟) |
| 无主机热备 | 约为生产环境3% | 分钟级别(与数据量相关,500G有效数据约为30分钟) |
容灾总体成本过高一直是客户的主要痛点,在成本大规模下降的情况下,企业可以有更多的业务系统实现更高级别的灾备,以保证业务连续性并满足相关生产合规要求。随着企业用云比例的攀升,未来利用无主机热备方式进行云上灾备,会成为一个新的业务增长机遇。
并且由于HyperBDR与云的强适配,灾备在云端的对象存储数据副本,可以实现在云上一键拉起,这也给灾备数据带来了更多的利用场景,例如云上演练,测试验证,大数据分析等等。

相关文章:
容灾独家技术揭秘:HyperBDR无主机数据同步技术
01、一对一单机热备-传统灾备方式 单机热备是一种备份解决方案,它使用两台服务器来确保高可用性,是市场上最为常见的灾备模式。 在单机热备中,一台主服务器和一台备用服务器保持同步,以确保在主服务器出现故障或宕机时可以立即切换…...

FANUC机器人SRVO-050碰撞检测报警和SRVO-053干扰值过大故障报警总结
FANUC机器人SRVO-050碰撞检测报警和SRVO-053干扰值过大故障报警总结 前面和大家分享了关于SRVO-050碰撞检测报警和SRVO-053干扰值过大的原因分析以及处理方法,感兴趣的朋友可以参考以下链接中的内容: FANUC机器人SRVO-050碰撞检测报警原因分析及处理对策...
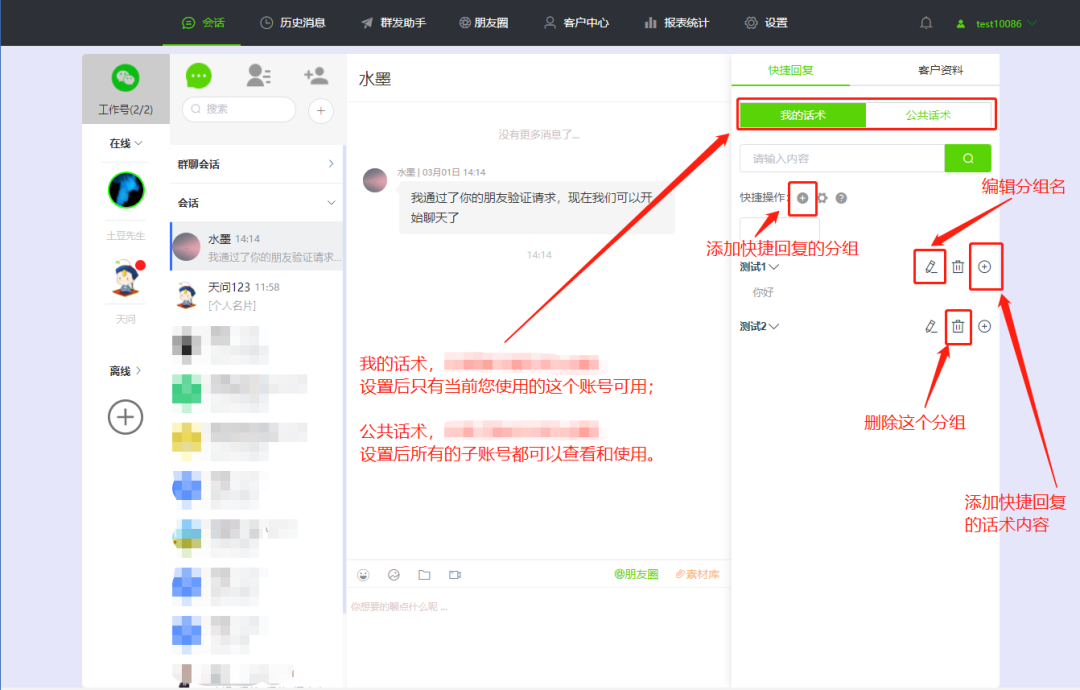
微信如何提高回复信息速度?
规范流程话术有什么用?为了提高回复客户的效率和质量,可以事先设计好的一套标准化的对话模板。它通常包括多个环节和问题,帮助客服人员或销售人员在与客户沟通时,按照标准化的流程进行,以提高工作效率和客户满意度。 如…...
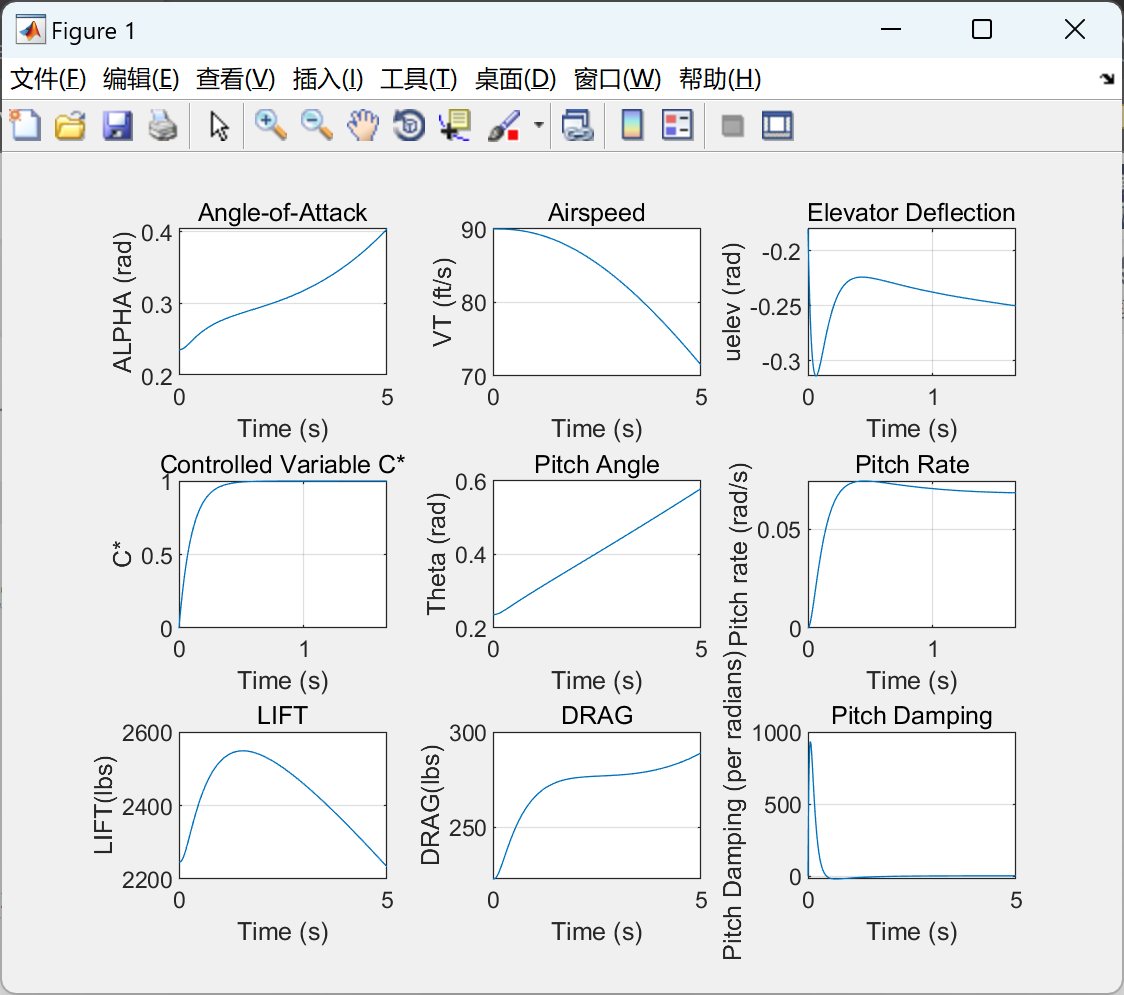
模拟Stevens Lewis描述的小型飞机纵向动力学的非线性动态反演控制器研究(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 🌈4 Matlab代码实现 💥1 概述 针对Stevens和Lewis描述的小型飞机纵向动力学的非线性动态,研究非线性动态反演控制器可以是一个有趣的课题。动态反演控制器的目标…...
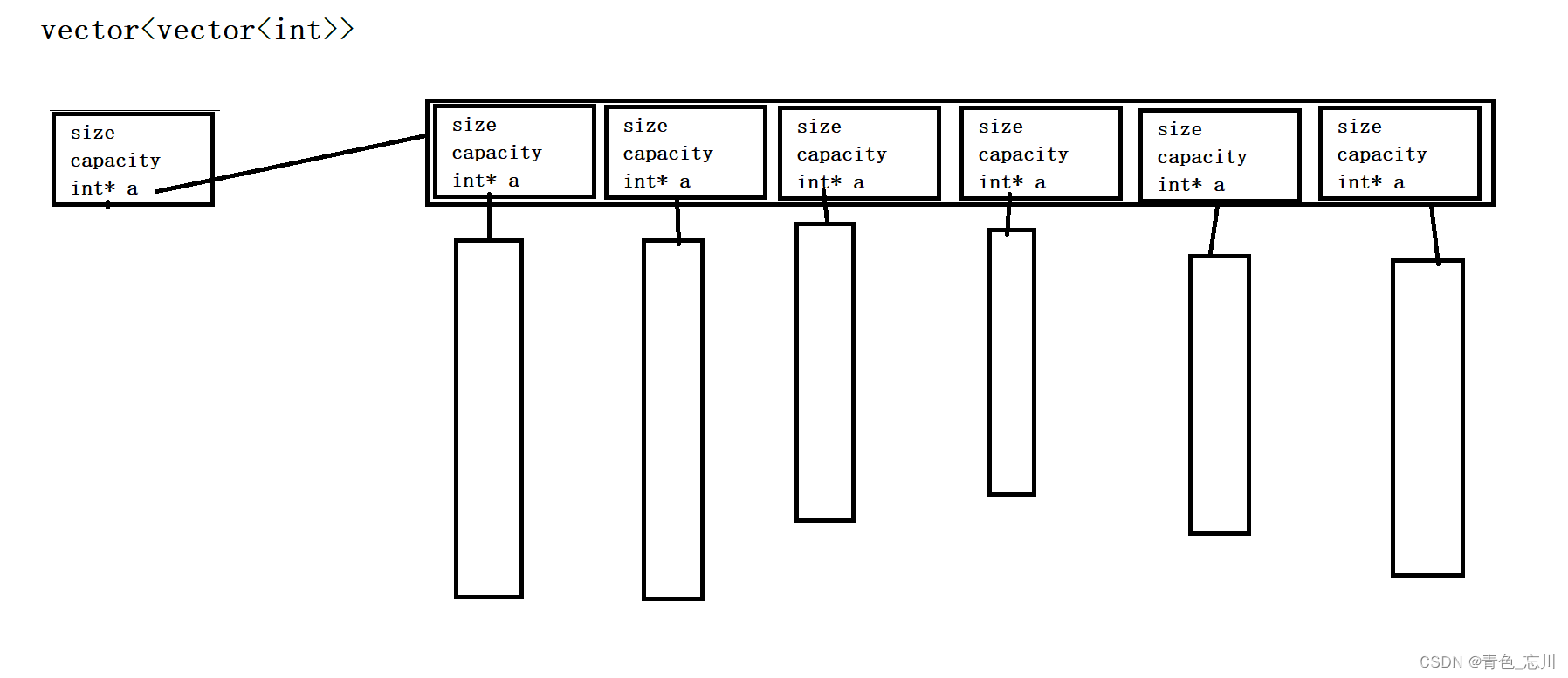
【C++从0到王者】第十二站:vector基本使用
文章目录 一、vector基本介绍二、vector的基本使用三、vector\<char> 和string的区别四、vector接口介绍1.vector的模板参数2.构造函数3.迭代器4.size和max_size5.resize和reserve6.operator[]和at7.front和back8.data9.push_back和pop_back10.insert和erase11.assign12.…...
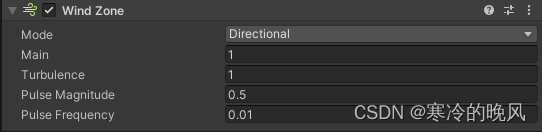
了解Unity编辑器之组件篇Miscellaneous(九)
一、Aim Constraint:是一种动画约束,用于使一个对象朝向另一个对象或一个指定的矢量方向 Activate按钮:用于激活或停用Aim Constraint。当Aim Constraint处于激活状态时,其约束效果将应用于目标对象。 Zero按钮:用于将…...

自动驾驶小车
开发自动驾驶小车涉及多个方面,包括硬件和软件。下面是一般情况下开发自动驾驶小车的主要步骤: 确定需求和功能:明确您的自动驾驶小车的目标和应用场景,确定需要的功能和特性,例如感知、决策、控制等。 硬件选择和安…...
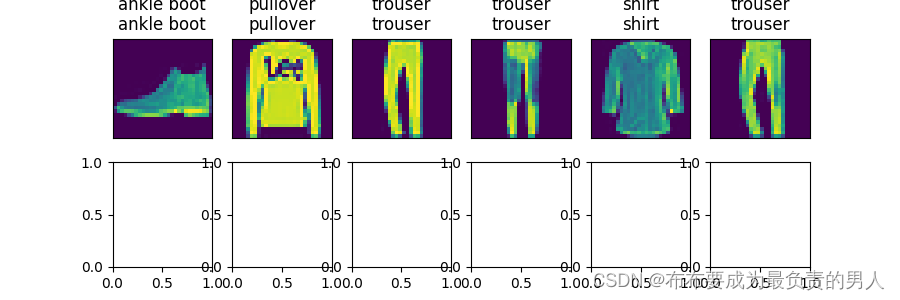
机器学习深度学习——多层感知机的从零开始实现
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——多层感知机 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 为…...

Redis的基本使用命令
Redis的使用命令 Redis是一个开源的使用ANSI C编写、遵守BSD协议、支持网络、可基于内存亦可持久化的日志型、Key-Value数据库,并提供多种语言的API。它通常被称为数据结构服务器,因为值(value)可以是 字符串(String), 哈希(Hash…...

Ts入门到放弃
TS 的核心能力在于给 JS 提供静态类型检查,是有类型定义的 JS 的超集,包括 ES5、ES5 和其他一些诸如泛型、类型定义、命名空间等特征的集合。 本次仅会针对类型声明部分配合示例进行着重介绍,更详细的内容以及特性可以查看 Typescript handb…...

黑客技术(网络安全)学习笔记
一、网络安全基础知识 1.计算机基础知识 了解了计算机的硬件、软件、操作系统和网络结构等基础知识,可以帮助您更好地理解网络安全的概念和技术。 2.网络基础知识 了解了网络的结构、协议、服务和安全问题,可以帮助您更好地解决网络安全的原理和技术…...

Cloud Kernel SIG 月度动态:支持龙芯和申威架构,合入两个内存新特性
Cloud Kernel SIG(Special Interest Group):支撑龙蜥内核版本的研发、发布和服务,提供生产可用的高性价比内核产品。 01 SIG 整体进展 Cloud Kernel 开始支持龙芯和申威架构。 合入两个内存新特性:MEMCG LRU LOCK 和…...
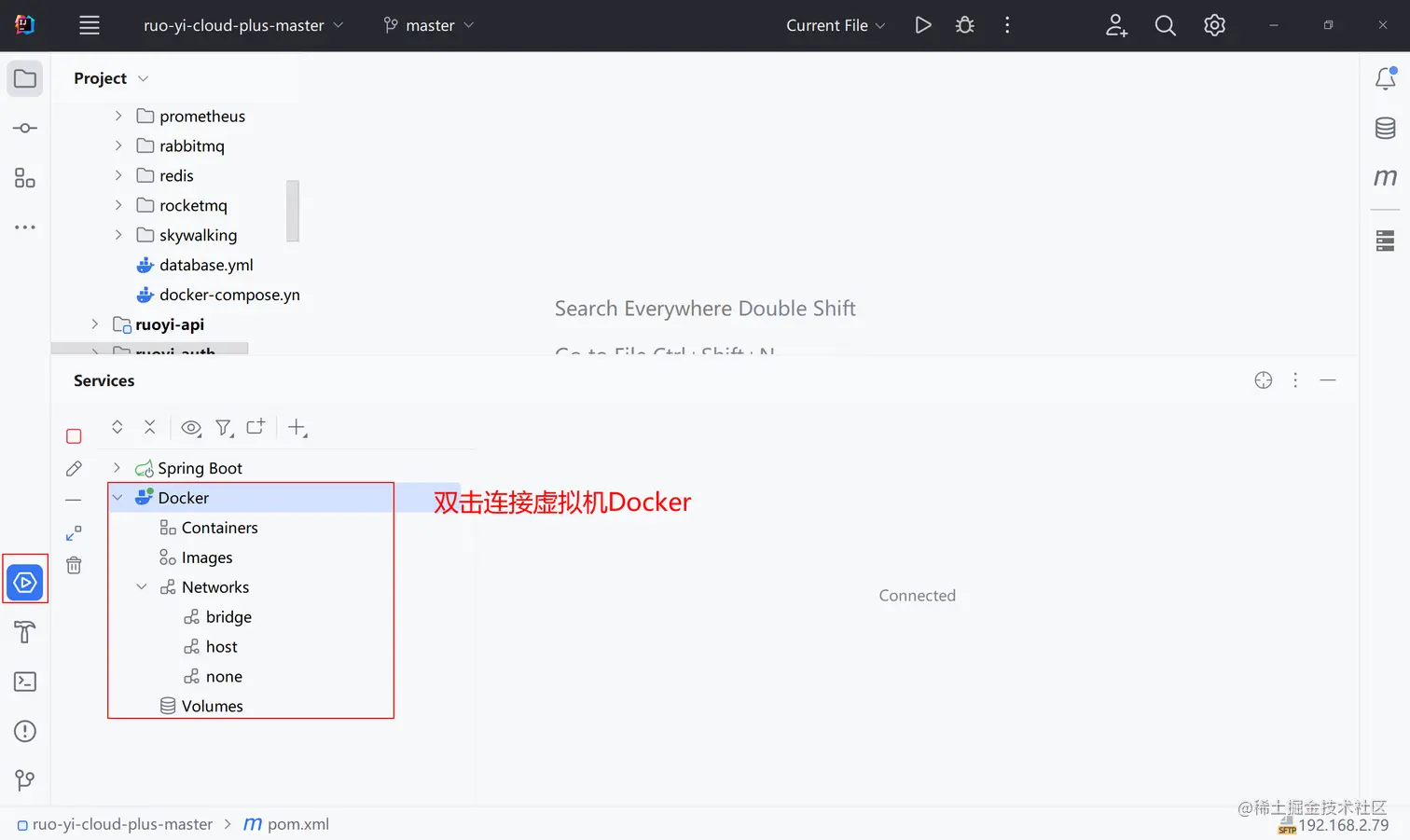
IDEA中连接虚拟机 管理Docker
IDEA中连接虚拟机 管理Docker 📔 千寻简笔记介绍 千寻简笔记已开源,Gitee与GitHub搜索chihiro-notes,包含笔记源文件.md,以及PDF版本方便阅读,且是用了精美主题,阅读体验更佳,如果文章对你有帮…...
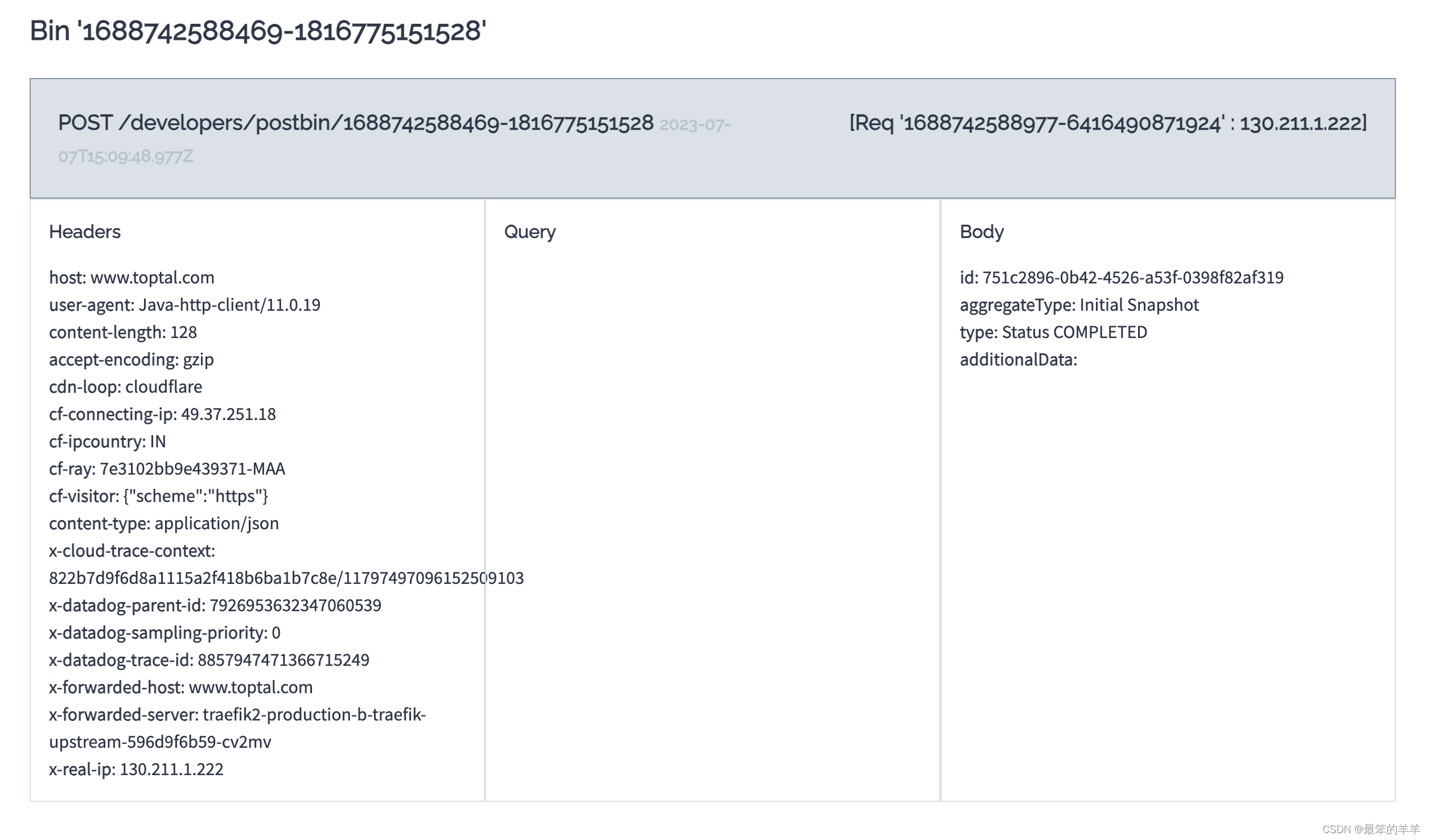
Debezium日常分享系列之:定制Debezium 信号发送和通知
Debezium日常分享系列之:定制Debezium 信号发送和通知 一、自定义信号和通知通道二、结论 Debezium 2.3 在信号和通知功能方面引入了新的改进。除了 Debezium 提供的预定义信号和通知通道之外,您还可以设置新的信号和通知通道。此功能使用户能够自定义系…...
实现思路)
RpcProvider(rpc服务提供者)实现思路
RpcProvider(服务提供者)实现思路 上一节说到,如何将一个本地服务发布成远程服务,但没有说明一个rpc框架怎么进行调用的,看看上节代码 #include <iostream> #include <string> #include "user.pb.h…...
GNSS技术知识你知道多少?这些你或许还未掌握
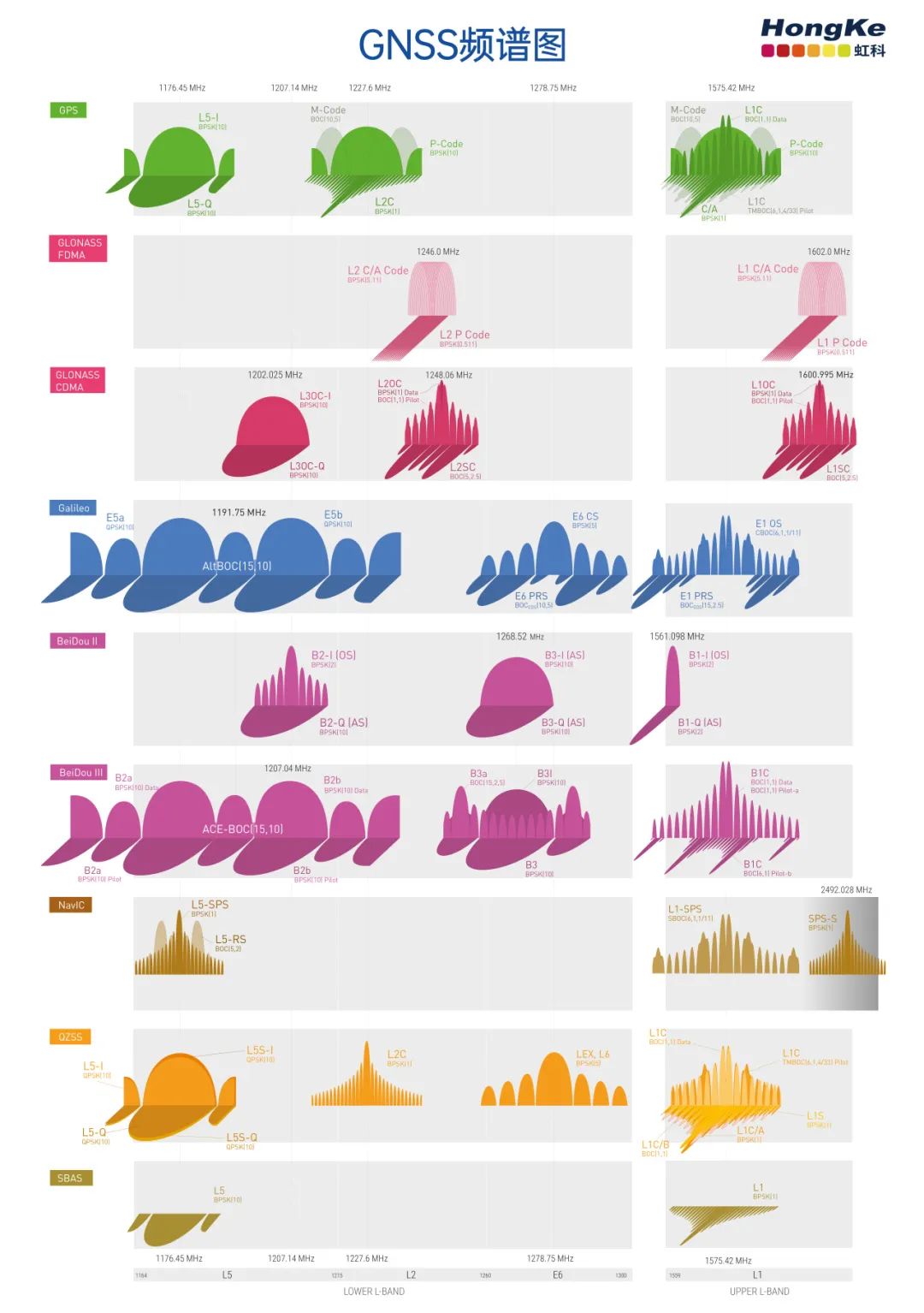
GNSS信号频段 GNSS频谱图展示了不同的GNSS信号及其星座、载波频率、调制方案,以及所有这些信号在同一L波段频段内如何相互关联,是GNSS专业人员的必备工具,包括设计和开发GNSS系统的工程师,以及测试GNSS系统的工程师。 GNSS术语 …...
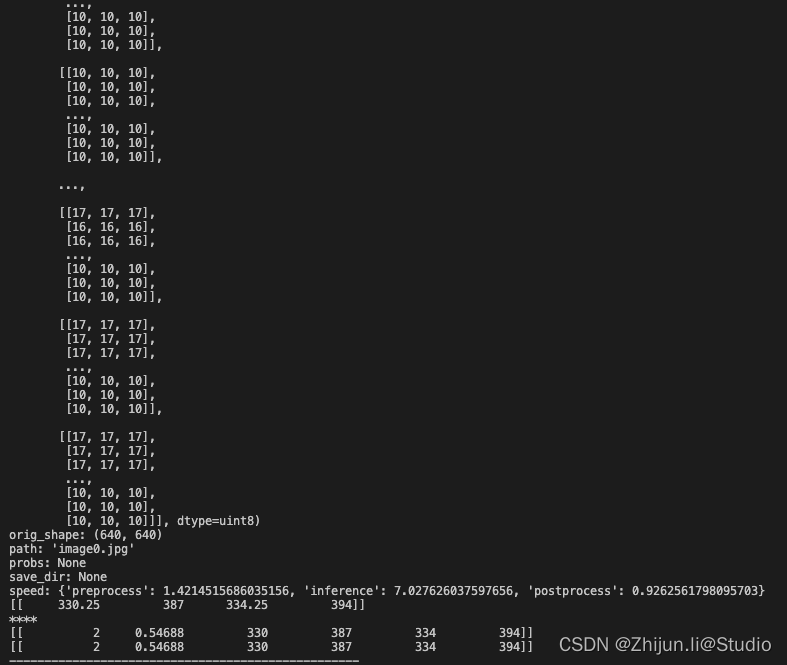
YOLOv8教程系列:三、使用YOLOv8模型进行自定义数据集半自动标注
YOLOv8半自动标注 目标检测半自动标注的优点包括: 1.提高标注效率:算法能够自动标注部分数据,减少了人工标注的工作量,节省时间和资源。 2.降低成本:自动标注可以减少人工标注的成本,特别是对于大规模数据…...

AI聊天GPT三步上篮!
1、是什么? CHATGPT是OpenAI开发的基于GPT(Generative Pre-trained Transformer)架构的聊天型人工智能模型。也就是你问它答,根据网络抓去训练 2、怎么用? 清晰表达自己诉求,因为它就是一个AI助手&#…...

如何彻底卸载VMware
目录 第一章、停止并卸载VMware程序1.1)停止VMware有关的服务1.2)打开任务管理器停止进程1.3)卸载VMware程序 第二章、残留文件删除2.1)打开注册表2.2)删除注册表残留文件2.3)C盘文件删除 友情提醒…...
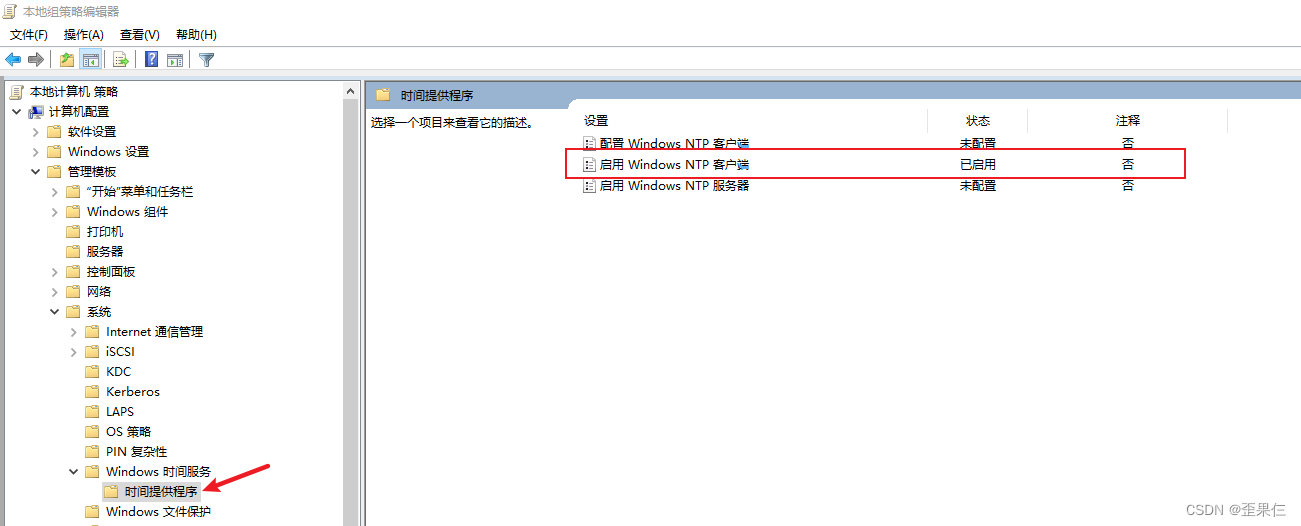
[个人笔记] Windows配置NTP时间同步
Windows - 运维篇 第六章 Windows配置NTP时间同步 Windows - 运维篇系列文章回顾Windows配置NTP时间同步域控环境的NTP配置工作组环境的NTP配置Windows的CMD部分命令集 参考来源 系列文章回顾 第一章 迁移WinSrv系统到虚拟机 第二章 本地安全策略xcopy实现实时备份文件夹内容 …...

Material File Picker深度解析:从设计理念到Android文件选择器的系统构建
Material File Picker深度解析:从设计理念到Android文件选择器的系统构建 【免费下载链接】MaterialFilePicker Picking files since 2015 项目地址: https://gitcode.com/gh_mirrors/ma/MaterialFilePicker 如何在Android应用中构建一个既美观又实用的文件选…...

【笔记】HarmonyOS核心设计理念
HarmonyOS初衷不是为了平替,是看到了万物智联时代,对智能终端操作系统有许多新的诉求; 本内容主要帮助理解HarmonyOS核心设计理念的关键背景与创新驱动力; 第一节:回顾操作系统的发展历史 第一台通用计算机诞生于1946年…...

西门子PLC对接须知:从通信到编程的实战指南
在工业自动化领域,西门子S7系列PLC凭借强大的功能和广泛的兼容性,成为众多企业的首选。无论是设备集成、数据采集还是系统升级,掌握PLC对接的核心要点,是保障项目高效落地的关键。本文将从通信连接、编程架构、数据处理三个维度&a…...

RT-Trace升级:集成GDB Server与一键烧录,打造嵌入式开发调试平台
1. 项目概述:嵌入式开发的“瑞士军刀”再进化如果你是一名嵌入式开发者,最近可能被一个词刷屏了——RT-Trace。这已经不是它第一次带来惊喜了。最初,它以非侵入式的实时追踪和性能分析能力,在RT-Thread社区里掀起了一阵热潮&#…...

Go 内存优化骚操作
1. 零内存占位符:struct{}{}原理:struct{} 是空结构体,Go 编译器对其做了特殊处理,它在内存中不占任何空间(大小为 0 字节)。场景 A:实现集合 (Set)map[string]struct{}。比起 map[string]bool&…...
:从sref灰度映射到氯化银颗粒模拟全链路拆解)
Midjourney范戴克印相实战手册(2024唯一认证工作流):从sref灰度映射到氯化银颗粒模拟全链路拆解
更多请点击: https://intelliparadigm.com 第一章:范戴克印相的历史溯源与数字再生哲学 范戴克印相(Van Dyke Brown printing)诞生于19世纪末,是铁银盐印相工艺的重要分支,以荷兰画家安东尼范戴克命名&am…...

SSH密钥不能直接访问phpMyAdmin:正确使用隧道方案
1. 这个标题里藏着三个根本性误解,先说清楚再动手 “如何安全的使用ssh秘钥访问phpmyadmin”——这句话本身就是一个典型的认知错位组合。我第一次在客户现场看到这个需求时,花了一整个下午才把技术逻辑理顺。 phpMyAdmin 本质上是一个运行在 Web 服务器…...

为内部知识库问答系统集成 Taotoken 多模型增强回答多样性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部知识库问答系统集成 Taotoken 多模型增强回答多样性 在企业内部知识库中构建智能问答系统,核心目标之一是提供准…...

微信单向好友检测:3分钟找出谁悄悄删了你
微信单向好友检测:3分钟找出谁悄悄删了你 【免费下载链接】WechatRealFriends 微信好友关系一键检测,基于微信ipad协议,看看有没有朋友偷偷删掉或者拉黑你 项目地址: https://gitcode.com/gh_mirrors/we/WechatRealFriends 你是否曾经…...

PyQt5串口上位机开发指南:从环境搭建到数据可视化实战
1. 项目概述与核心价值最近在做一个嵌入式项目,调试阶段需要频繁地和下位机进行数据交互。每次改个参数、读个状态,都得打开串口调试助手,手动输入十六进制命令,再盯着返回的数据一个个换算,效率低不说,还容…...