【点云处理教程】05-Python 中的点云分割
一、说明
这是我的“点云处理”教程的第 5 篇文章。“点云处理”教程对初学者友好,我们将在其中简单地介绍从数据准备到数据分割和分类的点云处理管道。
在上一教程中,我们看到了如何过滤点云以减少噪声或其密度。在本教程中,我们将应用一些聚类算法进行点云分割,即:K-means和DBSCAN。
【点云处理教程】00计算机视觉的Open3D简介
【点云处理教程】01如何创建和可视化点云
【点云处理教程】02从 Python 中的深度图像估计点云
【点云处理教程】03使用 Python 实现地面检测
【点云处理教程】04 Python 中的点云过滤
【点云处理教程】05-Python 中的点云分割
二、 简介
通常,数据分割旨在将数据重新分组为非重叠组。在点云分割中,这些组可能对应于区域:对象或其一部分、表面、平面等。点云分割方法可分为 3 大类:基于区域增长的方法、基于模型拟合的方法和基于聚类的方法。在本教程中,我们对基于聚类的方法感兴趣。聚类算法在许多机器学习API中实现,包括我们将在本教程中使用的Scikit-learn。
在引入一些聚类分析算法之前,请务必记住一些模型属性:
- 可扩展性。算法的可扩展性是它能够很好地处理大规模数据。关于聚类算法,它们的可扩展性取决于样本的数量(点云的点数)和聚类的数量。例如,K 均值和 DBSCAN 不能在大量集群中保持可伸缩性。
- 指标。为了创建样本组,聚类分析算法需要计算定义的指标,以查找同一组的点之间的相似性以及其他组的点之间的相似性。例如,K 均值计算点之间的距离,而 DBSCAN 计算最近点之间的距离。
- 运行。运行时间很重要,尤其是在实时应用程序中。它不仅取决于样本数量和组的数量,还取决于算法和计算指标。
- 超参数。该算法的超参数是一个需要考虑的非常重要的属性,尤其是组的数量。在许多应用程序中,集群的数量事先并不知道,因此固定组的数量可能会导致以后过程中的冲突。
- 行为。我认为重要的另一个重要因素是模型是确定性的还是随机的。确定性行为意味着算法每次执行都提供相同的输出,不涉及随机性。在这种情况下,聚类分析算法每次都会针对具有相同配置的相同点云返回具有相同点的相同聚类。相反,随机行为为具有相同配置的相同输入生成不同的输出;它具有一定的随机性。选择确定性模型还是随机模型取决于其应用。
这些是一些重要的属性,有关更多详细信息,您可以访问此链接。说够了,让我们开始练习吧!我们首先导入所需的库和我们的点云:
import numpy as np
import open3d as o3d
from sklearn.cluster import KMeans, DBSCAN, OPTICS
import matplotlib.pyplot as plt
from sklearn.preprocessing import StandardScaler# Read point cloud:
pcd = o3d.io.read_point_cloud("../data/depth_2_pcd_downsampled.ply")
# Get points and transform it to a numpy array:
points = np.asarray(pcd.points).copy() 为了可视化计算的群集,在调用该方法后添加了以下行:fit()
# Get labels:
labels = model.labels_
# Get the number of colors:
n_clusters = len(set(labels))# Mapping the labels classes to a color map:
colors = plt.get_cmap("tab20")(labels / (n_clusters if n_clusters > 0 else 1))
# Attribute to noise the black color:
colors[labels < 0] = 0
# Update points colors:
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])# Display:
o3d.visualization.draw_geometries([pcd])三、K均值
K-means是一种基于质心的算法。它将输入样本分成 K 个具有相等方差的独立组,同时最小化点之间的距离。
K 均值需要聚类数作为输入参数。可以将其他超参数设置为质心初始化的参数。修复此参数可使算法具有确定性。您可以在此处找到有关参数的更多信息。n_clustersrandom_state
为了分割点云,我们首先对点进行归一化,然后拟合。这里我们设置为 4。n_clusters
# Normalisation:
scaled_points = StandardScaler().fit_transform(points)
# Clustering:
model = KMeans(n_clusters=4)
model.fit(scaled_points)K 均值将输入点云分割为 4 个聚类:将墙分割成 3 组,其余点重新分组为单个聚类。

这可能对某些应用程序有好处,但对其他应用程序则不然。在我们的例子中,我们想要墙作为一个整体,椅子,等等。换句话说,我们希望将它们分组到一个由非密集区域隔开的密集区域中。
四、数据库扫描
DBSCAN算法旨在将样本分离为具有低密度区域的高密度簇。不必事先定义聚类数。DBSCAN对噪声具有鲁棒性:在聚类过程中,异常值被检测并忽略,因此聚类过程不受它们的影响。
DBSCAN 需要两个超参数:分别表示形成聚类的最小点数和用于定位相邻要素的距离测量值。您可以在此处找到有关DBSCAN的更多信息。min_sampleseps
为了分割点云,我们首先对点进行归一化,然后拟合。在这里,我们设置为 10 点和 0.15。min_sampleseps
# Normalisation:
scaled_points = StandardScaler().fit_transform(points)
# Clustering:
model = DBSCAN(eps=0.15, min_samples=10)
model.fit(scaled_points)对于固定参数,DBSCAN将输入点云分成8个簇:墙被分割成4组,椅子被分成2组,桌子被分割成一组。这是由于传感器的性质:噪声产生了一些间隙。

五、投影点云
正如我们从前面的例子中看到的,墙和椅子上的一些部分是分开重新组合的。这没关系,但是,如果我们只对地面上占用的空间感兴趣怎么办?例如,找到自由行走的空间。
在这种情况下,我们不关心高度,就像我们关心地面上的被占领区域一样。因此,我们可以将所有点投影到地平面上。这样,所有点将具有相同的高度(y 坐标),这不会影响聚类。在地平面上投影点云需要估计地平面方程,然后找到投影矩阵。我知道,这有很多工作要做!但是,如果我们只忽略 y 坐标呢?后者甚至会减少运行时间,因为在聚类过程中只考虑两个属性!
让我们尝试一下,从可视化投影点云开始。这里所有点都投影在平面 OXZ (y=0) 上:
# Project points on OXZ plane:
points[:, 1] = 0
pcd_projected = o3d.geometry.PointCloud() # create point cloud object
pcd_projected.points = o3d.utility.Vector3dVector(points) # set pcd_np as the point cloud points
o3d.visualization.draw_geometries([pcd_projected])
在平面 OXZ 上投影点云。
现在,我们可以分割投影点云。请注意,为此,我们只考虑 x 和 z 坐标:
# projection: caonsider the x and z coordinates (y=0)
points_xz = points[:, [0, 2]]# Normalisation:
scaled_points = StandardScaler().fit_transform(points_xz)# Clustering:
model = DBSCAN(eps=0.15, min_samples=10)
model.fit(scaled_points)投影点云上的分割如下图所示:

或者在原始点云上:

通过投影,我们可以看到点云根据占用的空间进行分割,这对于许多应用程序来说更好。但是,对于其他应用程序,这可能不像精细分割那样工作,或者当有物体最初不在地面上时,例如投射路过的鸟!
六、结论
在本教程中,我们学习了如何使用 K 均值和 DBSCAN 分割点云。聚类算法的挑战是设置良好的超参数,这对于实际应用程序并不明显。作为练习,您可以针对不同的超参数值测试这些算法,也可以测试Scikit-learn提供的其他聚类算法。
谢谢,我希望你喜欢阅读这篇文章。您可以在我的 GitHub 存储库中找到示例。如果您有任何问题或建议,请随时在下面给我留言。
相关文章:
【点云处理教程】05-Python 中的点云分割
一、说明 这是我的“点云处理”教程的第 5 篇文章。“点云处理”教程对初学者友好,我们将在其中简单地介绍从数据准备到数据分割和分类的点云处理管道。 在上一教程中,我们看到了如何过滤点云以减少噪声或其密度。在本教程中,我们将应用一些聚…...
代码随想录算法训练营之JAVA|第十七天| 654. 最大二叉树
今天是第17天刷leetcode,立个flag,打卡60天。 算法挑战链接 654. 最大二叉树https://leetcode.cn/problems/maximum-binary-tree/description/ 第一想法 错误的想法,就不说了。 看完代码随想录之后的想法 用递归模拟真实的过程 如果我…...

C++重写函数、隐藏函数、重载函数的区别对比
目录 1.函数重载 1.1定义 1.2函数重载的规则: 1.3函数重载的作用: 2.函数重写: 2.1定义 2.2例子: 3.函数隐藏 3.1定义 3.2举个例子: 1.函数重载 1.1定义 我们在学类和对象的封装特性时学过一个词叫重载,…...

15.python设计模式【函数工厂模式】
1.知识讲解 内容:定义一个字典,在python中一切皆对象,将所有的函数进行封装,然后定一个分发函数进行分发,将原来if…else全部干掉。角色: 函数(function)函数工厂(funct…...
Redis主从复制、哨兵、cluster集群原理+实验
目录 一、Redis 主从复制 1、主从复制的作用 2、主从复制流程 3、搭建Redis 主从复制 安装Redis(所有主机) 修改Master节点Redis配置文件 修改Slave节点Redis配置文件 验证主从效果 一、Redis 主从复制 主从复制,是指将一台Redis服务器的数据&am…...

微信小程序如何实现页面传参?
前言 只要你的小程序超过一个页面那么可能会需要涉及到页面参数的传递,下面我总结了 4 种页面方法。 路径传递 通过在url后面拼接参数,参数与路径之间使用 ? 分隔,参数键与参数值用 相连,不同参数用 & 分隔;如…...
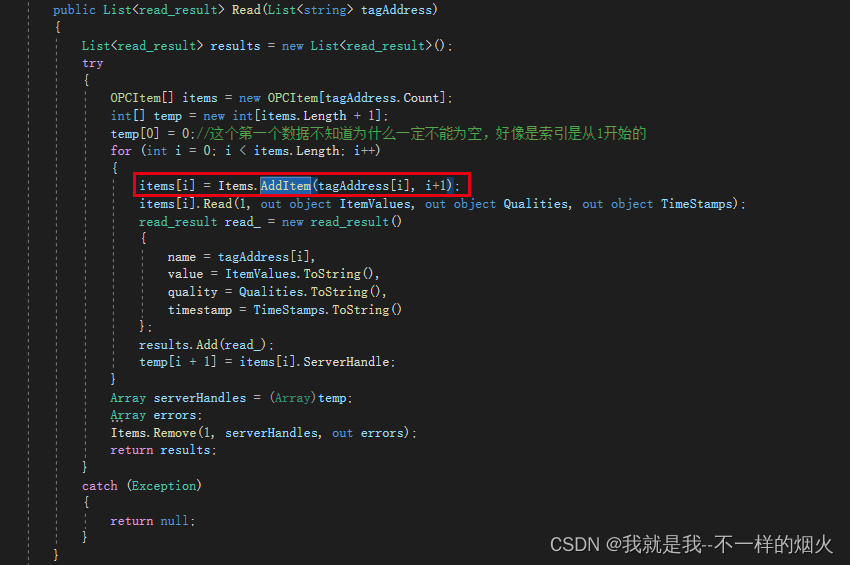
OPC DA 客户端与服务器的那点事
C#开发OPC客户端,使用OPCDAAuto.dll。在开发过程中偶遇小坎坷,主要记录一下问题解决办法。 1、建立客户端,参考链接。建立WinFrom工程,将博客中代码全部复制即可运行: https://www.cnblogs.com/kjgagaga/p/17011730.…...
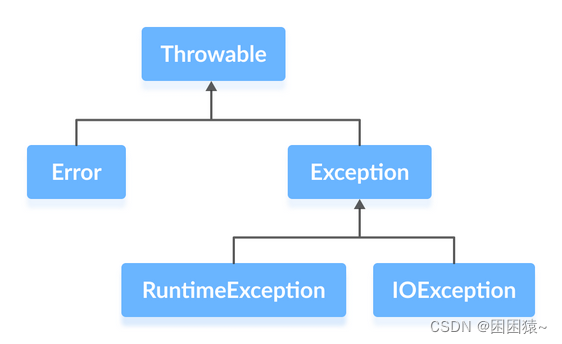
Java 错误异常介绍(Exceptions)
1、异常介绍 异常是程序执行期间发生的意外事件。它影响程序指令流,从而导致程序异常终止。 发生异常的原因有很多。其中包括: 无效的用户输入 设备故障 网络连接丢失 物理限制(磁盘内存不足) 代码错误 打开一个不可用的文…...

每日一题——旋转数组的最小数字
题目 有一个长度为 n 的非降序数组,比如[1,2,3,4,5],将它进行旋转,即把一个数组最开始的若干个元素搬到数组的末尾,变成一个旋转数组,比如变成了[3,4,5,1,2],或者[4,5,1,2,3]这样的。请问,给定这…...

SpringBoot Jackson 日期格式化统一配置
目录 1.在全局配置文件配置 2.通过JavaBean方式配置 1.在全局配置文件配置 spring:jackson:date-format: yyyy-MM-dd HH:mm:sstime-zone: GMT8 该配置方式仅支持 Date 类型的日期格式化,不支持LocalDate 及 LocalDateTime 的格式化。 2.通过JavaBean方式配置 …...
)
剑指 Offer 38. 字符串的排列 / LeetCode 47. 全排列 II(回溯法)
题目: 链接:剑指 Offer 38. 字符串的排列 难度:中等 输入一个字符串,打印出该字符串中字符的所有排列。 你可以以任意顺序返回这个字符串数组,但里面不能有重复元素。 示例: 输入:s “abc” 输出&…...

【前端知识】React 基础巩固(四十三)——Effect Hook
React 基础巩固(四十三)——Effect Hook 一、Effect Hook的基本使用 Effect Hook 用来完成一些类似class中生命周期的功能。 在使用类组件时,不管是渲染、网路请求还是操作DOM,其逻辑和代码是杂糅在一起的。例如我们希望把计数器结果显示在标签上&…...
一百三十八、ClickHouse——使用clickhouse-backup备份ClickHouse库表
一、目标 使用clickhouse-backup在本地全库备份ClickHouse的数据库 二、前提 已经安装好clickhouse-backup 注意:由于之前同事已经按照好clickhouse-backup,所以我就没有安装 如有需要请参考其他人的博客安装一下,下面是我认为比较好的一…...

【无标题】使用Debate Dynamics在知识图谱上进行推理(2020)7.31
使用Debate Dynamics在知识图谱上进行推理 摘要介绍背景与相关工作我们的方法 摘要 我们提出了一种新的基于 Debate Dynamics 的知识图谱自动推理方法。 其主要思想是将三重分类任务定义为两个强化学习主体之间的辩论游戏,这两个主体提取论点(知识图中…...

windows下若依vue项目部署
下载若依项目,前端后端项目本地启动前端打包,后端打包配置nginx.conf 需要注意的是:路径别用中文,要不然报错 #前台访问地址及端口80,在vue.config.js中可查看server {listen 80;server_name localhost; #后台…...
【目标检测】基于yolov5的水下垃圾检测(附代码和数据集,7684张图片)
写在前面: 首先感谢兄弟们的订阅,让我有创作的动力,在创作过程我会尽最大能力,保证作品的质量,如果有问题,可以私信我,让我们携手共进,共创辉煌。 路虽远,行则将至;事虽难,做则必成。只要有愚公移山的志气、滴水穿石的毅力,脚踏实地,埋头苦干,积跬步以至千里,就…...

P1734 最大约数和
题目描述 选取和不超过 S 的若干个不同的正整数,使得所有数的约数(不含它本身)之和最大。 输入格式 输入一个正整数 S。 输出格式 输出最大的约数之和。 输入输出样例 输入 11 输出 9 说明/提示 【样例说明】 取数字 4 和 6&a…...

Excel将单元格中的json本文格式化
打开Excel文件并按下ALT F11打开Visual Basic for Applications(VBA)编辑器。 输入下面的代码 Sub FormatJSONCells()Dim cell As RangeDim jsonString As StringDim json As ObjectDim formattedJSON As String 循环遍历选定的单元格范围For Each ce…...
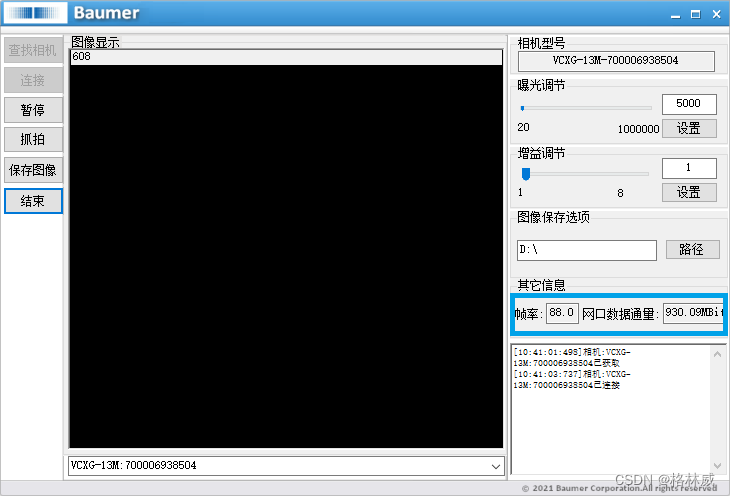
Baumer工业相机堡盟工业相机如何通过BGAPI SDK获取相机当前实时帧率(C#)
Baumer工业相机堡盟工业相机如何通过BGAPISDK里函数来计算相机的实时帧率(C#) Baumer工业相机Baumer工业相机的帧率的技术背景Baumer工业相机的帧率获取方式CameraExplorer如何查看相机帧率信息在BGAPI SDK里通过函数获取相机帧率 Baumer工业相机通过BGA…...
XGBoost的基础思想与实现
目录 1. XGBoost VS 梯度提升树 1.1 XGBoost实现精确性与复杂度之间的平衡 1.2 XGBoost极大程度地降低模型复杂度、提升模型运行效率 1.3 保留了部分与梯度提升树类似的属性 2. XGBoost回归的sklearnAPI实现 2.1 sklearn API 实现回归 2.2 sklearn API 实现分类 3. XGBo…...

ChatGPT资源宝库:从提示工程到项目实践的完整指南
1. 项目概述:一份关于ChatGPT的“Awesome”清单意味着什么?如果你最近在GitHub上搜索过任何与ChatGPT、AI或提示工程相关的内容,那么你大概率见过一个以“awesome-”开头的仓库。而sindresorhus/awesome-chatgpt无疑是这个领域里最知名、最常…...

我的Claude Code不再被封号,Taotoken提供了稳定可靠的替代方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 我的Claude Code不再被封号,Taotoken提供了稳定可靠的替代方案 作为一名频繁使用Claude Code进行代码生成和审查的个人…...

解锁端侧智能:基于BigDL-LLM与Qwen-1.8B-Chat的CPU高效推理实践
1. 为什么要在CPU上部署大模型? 最近两年大模型技术发展迅猛,但大多数应用都依赖昂贵的GPU服务器。我在实际项目中发现,很多中小企业和个人开发者其实更需要能在普通电脑上运行的轻量化方案。这就是为什么基于CPU的大模型部署方案变得越来越…...

安全聚合技术:原理、实现与多场景应用
1. 安全聚合技术概述安全聚合(Secure Aggregation)是一种多方安全计算技术,它允许多个互不信任的参与方在不泄露各自私有数据的前提下,共同计算出一个聚合结果。这项技术的核心价值在于解决了数据隐私与数据共享之间的矛盾&#x…...

智慧树自动刷课神器Autovisor:3分钟极速上手的完整指南
智慧树自动刷课神器Autovisor:3分钟极速上手的完整指南 【免费下载链接】Autovisor 2025智慧树刷课脚本 基于Python Playwright的自动化程序 [有免安装版] 项目地址: https://gitcode.com/gh_mirrors/au/Autovisor 还在为智慧树平台的繁琐操作而烦恼吗&#…...

技术解构:逆向工程视角下的百度网盘下载链接解析机制
技术解构:逆向工程视角下的百度网盘下载链接解析机制 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 想象一下,当你收到朋友分享的百度网盘链接时&…...

Windows上运行Swift代码的三种实战路径
1. 为什么Windows开发者需要Swift? Swift作为苹果生态的主力编程语言,近年来在服务端开发、机器学习等领域的应用越来越广泛。但很多刚接触Swift的Windows开发者会发现:官方文档里压根没提Windows支持!这其实是因为Swift最初就是…...

DIY蓝牙游戏手柄:基于Bluefruit EZ-Key的免编程硬件制作全攻略
1. 项目概述与设计思路几年前,我还在用有线手柄在电脑上打游戏,那根线总是缠来缠去,桌面也乱糟糟的。后来市面上无线手柄选择多了,但总感觉少了点自己动手的乐趣,功能也千篇一律。直到我开始接触像Adafruit Bluefruit …...

嵌入式动画优化:DMA驱动位图渲染在SAMD21上的实现
1. 项目概述与核心思路如果你玩过嵌入式开发,尤其是想在小小的微控制器屏幕上搞点流畅的动画,大概率会被“卡顿”和“闪屏”折磨过。传统的逐像素绘制,在需要全屏更新时,CPU时间几乎全耗在了等待屏幕刷新上,用户体验大…...

CircuitPython REPL与库管理:嵌入式开发的效率利器
1. CircuitPython REPL:你的嵌入式开发“瑞士军刀” 如果你玩过Arduino,肯定对“上传-编译-看结果”这个循环不陌生。每次改一行代码,都得重新编译、上传,然后盯着串口看输出,效率低得让人抓狂。CircuitPython带来的R…...