基于FPGA的超声波测距——UART串口输出
文章目录
- 前言
- 一、超声波模块介绍
- 1、产品特点
- 2、超声波模块的时序图
- 二、系统设计
- 1、系统模块框图
- 2、RTL视图
- 三、源码
- 1、div_clk_us(1us的分频)
- 2、产生驱动超声波的信号
- 3、串口发送模块
- 4、HC_SR04_uart(顶层文件)
- 四、效果
- 五、总结
- 六、参考资料
前言
环境:
1、Quartus18.0
2、vscode
3、板子型号:EP4CE10F17C8
4、超声波模块:HC_SR04
要求:
使用 EP4CE10F17C8开发板驱动 超声波检测模块(HC_SR04 ),并将所测得数据显示到串口助手上。
一、超声波模块介绍
1、产品特点
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
(1)采用IO口 TRIG触发测距,给最少10us的高电平信呈。
(⑵)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;

2、超声波模块的时序图
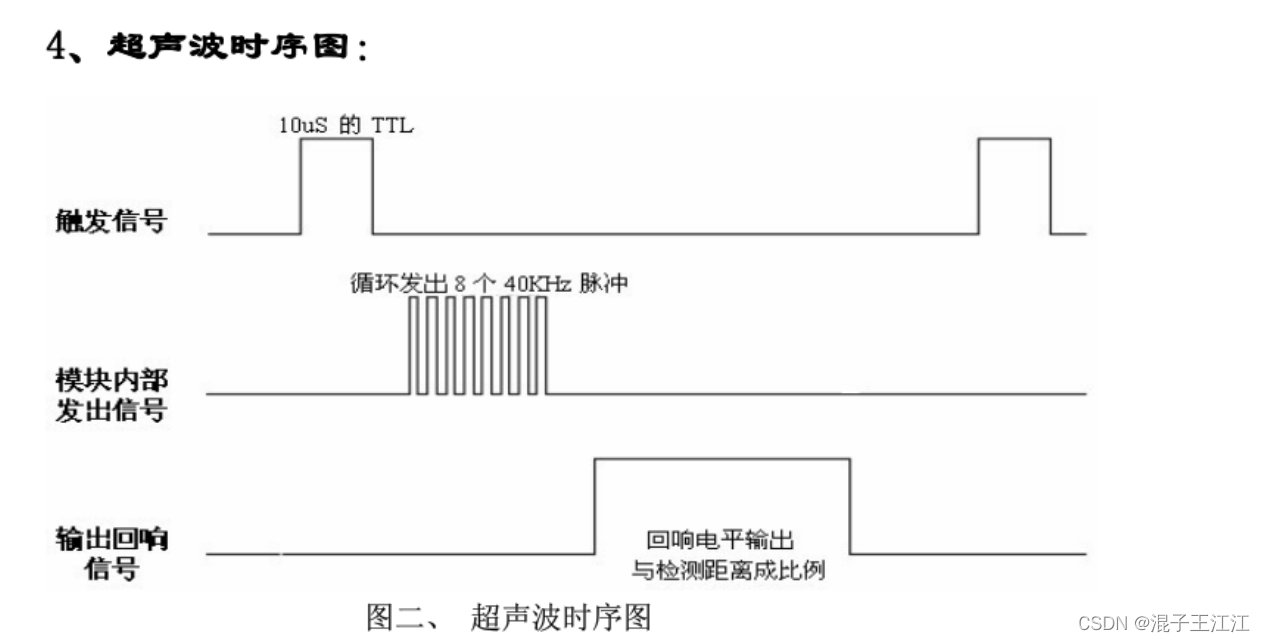
以上时序图表明你只需要提供一个10uS 以上脉冲触发信号,该模块内部将发出8个40kHz周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。
二、系统设计
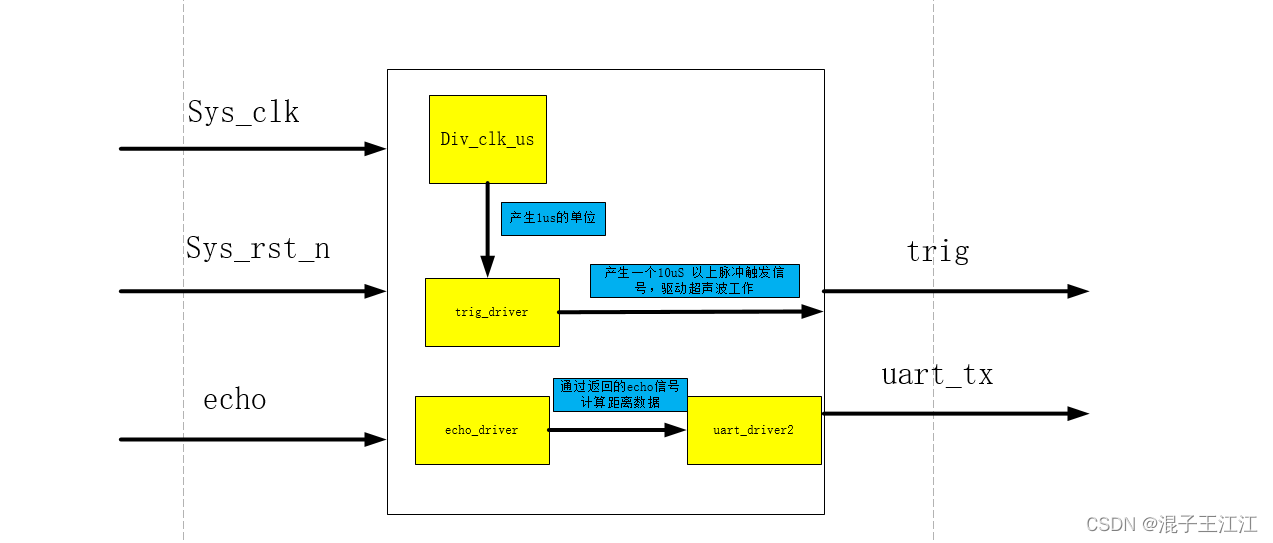
1、系统模块框图
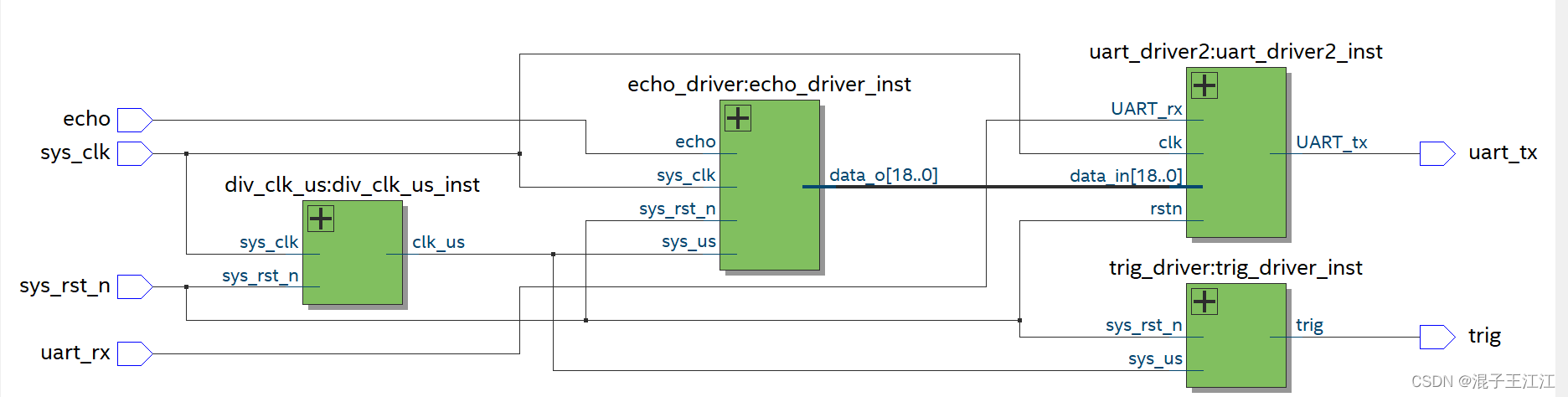
2、RTL视图
三、源码
1、div_clk_us(1us的分频)
/**************
芯片晶振为50MHZ,HC_SR04需要一个10us的以上脉冲触发信号
所以这里我们需要对系统时钟进行分频,方便我们产生10us的持续电平
**************/
module div_clk_us (input sys_clk,input sys_rst_n,output wire clk_us
);//根据晶振换算,1us只需要计数50次即可parameter [5:0] MAX_us = 6'd49;
reg [5:0] cnt;
always @(posedge sys_clk or negedge sys_rst_n) beginif(!sys_rst_n)begincnt <= 6'd0;endelse if(cnt == MAX_us)begincnt <= 6'd0;endelse begincnt <= cnt + 6'd1;end
end
assign clk_us = cnt >= MAX_us;
endmodule
2、产生驱动超声波的信号
/****************
根据分频的1us时钟,产生一个持续10us的电平用于驱动HC_SR04
最好是稍微大于10us,这样稳妥一些
****************/
module trig_driver(input sys_us ,//1us时钟input sys_rst_n ,output trig //驱动超声波的信号
);parameter T = 19'd29_9999;//设置触发信号的周期,这里设置得越小,其触发越频繁,应该返回的距离更新更频繁reg [18:0] cnt;always @(posedge sys_us) begin// or negedge sys_rst_nif(!sys_rst_n)begincnt <= 19'd0;endelse if(cnt == T)begincnt <= 19'd0;endelse begincnt <= cnt + 1'd1;end
end
//15us的高电平
assign trig = (cnt <15 ) ? 1'b1 : 1'b0;//正确的,只是时间太短,观察不到,目前应该是串口问题
endmodule
3、串口发送模块
module uart_send
#(parameter CLK = 26'd50000000 , // 时钟频率parameter BAUD = 17'd115200 // 波特率
)
(input wire clk ,input wire rstn , input wire [7 : 0] data_in , // 需要发送的数据input wire flag_in , // 数据接收标志位,既发送标志位output wire tx_done , output reg UART_tx // 串口输出位
);localparam Baud_Clk = CLK/BAUD ; // 传输每个 Baud 需要的时钟数reg tx_en ; // 发送使能reg flag_bit ; // 比特标志位,采用下降沿发送reg [8 : 0] cnt_baud ; // 波特率计数器reg [3 : 0] cnt_bit ; // 比特计数器assign tx_done = cnt_bit == 4'd9 && flag_bit == 1'b1;// 发送使能always @(posedge clk or negedge rstn) beginif(!rstn) begintx_en <= 1'b0;end// 已经发送了十位 bit 并且到达下一个下降沿,输入只需要判断到数据位最后一位,输出则需要判断完整输出else if(cnt_bit == 4'd9 && flag_bit == 1'b1) begintx_en <= 1'b0;endelse if(flag_in == 1'b1) begintx_en <= 1'b1;endend// 波特计数器always @(posedge clk or negedge rstn) beginif(!rstn) begincnt_baud <= 9'd0;end// 传输完成所有波特或者使能失效,表示发送结束else if(cnt_baud == Baud_Clk - 1'b1 || tx_en == 1'b0) begincnt_baud <= 9'd0;endelse begincnt_baud <= cnt_baud + 9'd1;endendalways @(posedge clk or negedge rstn) beginif(!rstn) beginflag_bit <= 1'b0;end// 只有刚开始发送的一瞬间会产生一个时钟周期上升沿和下降沿else if(cnt_baud == 9'd1) beginflag_bit <= 1'b1;endelse beginflag_bit <= 1'b0;endend// 计数10分有效数据位always @(posedge clk or negedge rstn) beginif(!rstn) begincnt_bit <= 4'd0;end// 已经发送了十位 bit 并且到达下一个下降沿else if(cnt_bit == 4'd9 && flag_bit == 1'b1) begincnt_bit <= 4'd0;end// 使能有效,下降沿发送数据else if(flag_bit == 1'b1 && tx_en == 1'b1) begincnt_bit <= cnt_bit + 4'd1;endelse begincnt_bit <= cnt_bit;endend// 满足 RS232 协议 起始位为 0,停止位为 1,并按位输出always @(posedge clk or negedge rstn) beginif(!rstn) beginUART_tx <= 1'd1;end// 下降沿发送数据else if(flag_bit == 1'b1) begincase (cnt_bit)0: UART_tx <= 1'd0 ;1: UART_tx <= data_in[0] ;2: UART_tx <= data_in[1] ;3: UART_tx <= data_in[2] ;4: UART_tx <= data_in[3] ;5: UART_tx <= data_in[4] ;6: UART_tx <= data_in[5] ;7: UART_tx <= data_in[6] ;8: UART_tx <= data_in[7] ;9: UART_tx <= 1'd1 ;default: UART_tx <= 1'd1 ;endcaseendend
endmodule //UART_send
4、HC_SR04_uart(顶层文件)
module HC_SR04_uart(input sys_clk ,input sys_rst_n ,input echo ,input uart_rx , // 串口输入 output trig , output uart_tx //串口发送端口
);
wire clk_us;
wire [18:0] data_o_r;//待发送的数据
//时钟分频
div_clk_us div_clk_us_inst(/*input */ .sys_clk (sys_clk ),/*input */ .sys_rst_n (sys_rst_n),/*output*/ .clk_us (clk_us)
);
//产生驱动超声波信号
trig_driver trig_driver_inst(/*input */ .sys_us (clk_us),//1us时钟/*input */ .sys_rst_n (sys_rst_n),/*output*/ .trig (trig)//驱动超声波的信号
);
//对返回来的echo信号进行计算得出距离
echo_driver echo_driver_inst(/*input */ .sys_clk (sys_clk),/*input */ .sys_us (clk_us),/*input */ .sys_rst_n (sys_rst_n),/*input */ .echo (echo),/*output [18:0]*/ .data_o (data_o_r)//检测距离,保留三位小数,*1000实现
);
//初步想法是使用串口发送模块直接操作,不需要串口回环,否则需要发送到接收,接收模块再发送给发送模块,发送模块再发送给PC
uart_driver2 uart_driver2_inst(.clk (sys_clk ),.rstn (sys_rst_n),.data_in (data_o_r ),.UART_rx (uart_rx),.UART_tx (uart_tx )
);
endmodule
四、效果
FPGA串口输出测距信息
五、总结
前面写过FPGA测距的数码管显示,STM32的测距串口输出,其实这篇文章的内容之前完成过。由于前面又学习了一边串口回环,所以又敲了一遍,实现一下FPGA的串口输出。虽然做过,但是还是折腾了一天,仿真、SignalTap II 抓了一下午的信号。但这次比上一次的理解更加深刻,收获更多。
六、参考资料
1、基于FPGA的超声波测距——数码管显示
2、源码:https://github.com/no1jiangjiang/HC-SR04_uart_FPGA
相关文章:
基于FPGA的超声波测距——UART串口输出
文章目录 前言一、超声波模块介绍1、产品特点2、超声波模块的时序图 二、系统设计1、系统模块框图2、RTL视图 三、源码1、div_clk_us(1us的分频)2、产生驱动超声波的信号3、串口发送模块4、HC_SR04_uart(顶层文件) 四、效果五、总结六、参考资料 前言 环境: 1、Quar…...

Python web实战之 Django 的 MVC 设计模式详解
技术栈:Python、Django、HTML、CSS、JavaScript。 概要 在 Web 开发中,MVC(Model-View-Controller)模式是一种非常常见的设计模式,它可以帮助我们更好地管理代码,提高代码的可维护性。今天就介绍如何使用 …...
Stable Diffusion VAE:改善图像质量的原理、选型与使用指南
VAE Stable Diffusion(稳定扩散)是一种用于生成模型的算法,结合了变分自编码器(Variational Autoencoder,VAE)和扩散生成网络(Diffusion Generative Network)的思想。它通过对变分自…...

maven里面没有plugins dependence问题解决
说明:今天在做Nacos、Dubbo整合的时候,在父模块中做了版本限制,出错后就又把版本控制什么都删掉,回退到最开始的状态,此时父模块下面的服务右侧的 maven里面没有plugins dependence ,然后项目全都报错。 问…...

Wi-Fi 6技术详解
1. 介绍 Wi-Fi 6,也称为802.11ax,是Wi-Fi技术的最新标准。它是对之前标准Wi-Fi 5(802.11ac)的升级和改进,旨在提供更高的速度、更大的容量、更好的性能和更高的可靠性。Wi-Fi 6技术的引入为无线网络带来了革命性的变化…...
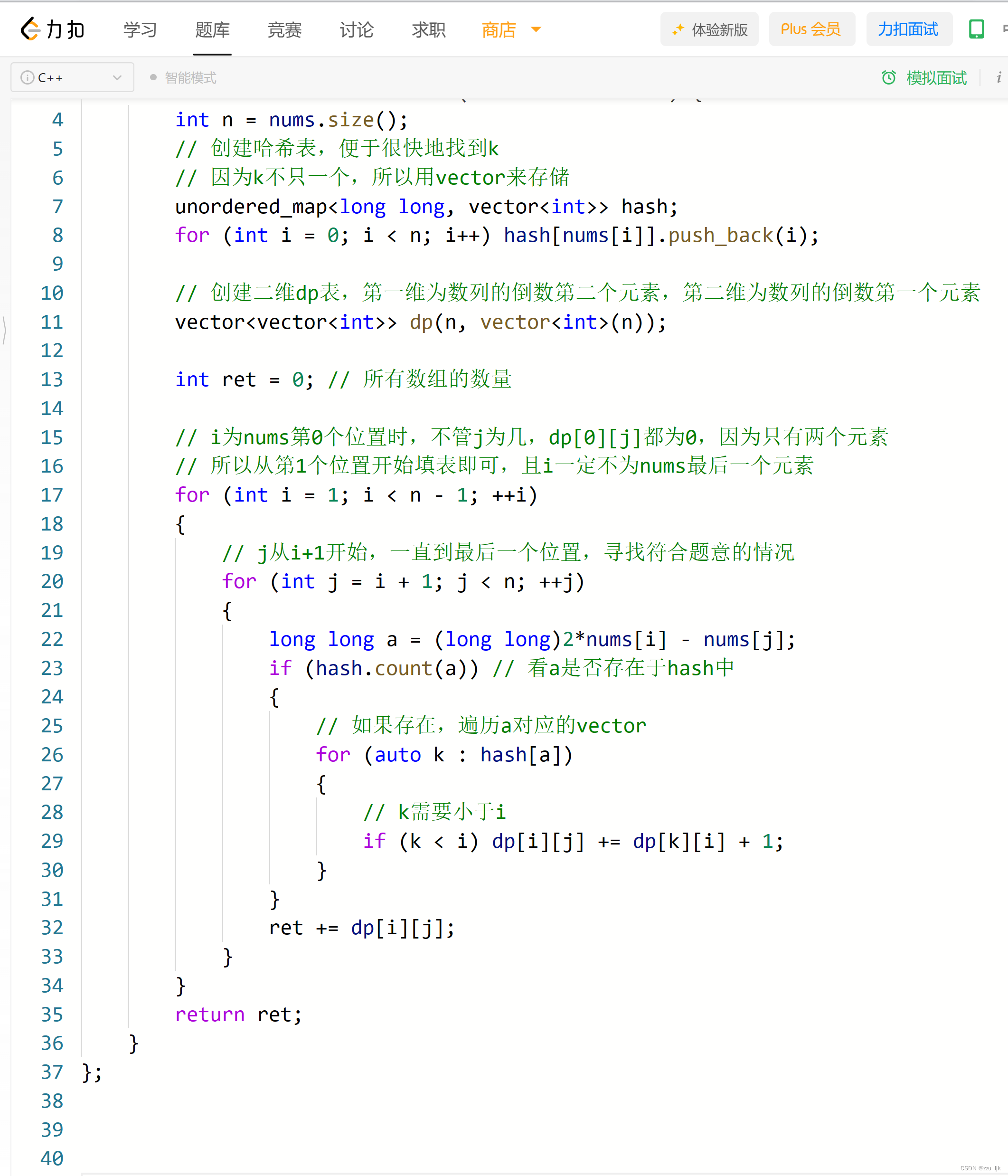
【LeetCode】446. 等差数列划分II -- 子序列
题目链接 文章目录 1. 思路讲解1.1 dp表的创建1.2 状态转移方程1.3 使用哈希表找到k1.4 初始化1.5 返回值1.6 该题坑爹的一点 2. 代码编写 1. 思路讲解 我们要知道以某个位置为结尾的子序列的数量,可以通过它的以上一位置的为结尾的子序列的数量得知,也…...

几个似非而是的注释问题
C 语言的注释可以出现在 C 语言代码的任何地方。这句话对不对?这是我当学生时我 老师问的一个问题。我当时回答是不对。好,那我们就看看下面的例子: A ), int/*...*/i; B ), char* s"…...

【设计模式|上】创建型模式
every blog every motto: You can do more than you think. https://blog.csdn.net/weixin_39190382?typeblog 0. 前言 设计模式(上): 简单工厂模式工厂模式抽象工厂模式建造者模式单例模式 1. 正文 1.1 创建型(Creational Patterns) …...

【JS】类 class
【JS】类 class 定义类类的方法类继承静态方法 类(class)是用于创建对象的模板。 我们使用 class 关键字来创建一个类,类体在一对大括号 {} 中,我们可以在大括号 {} 中定义类成员的位置,如方法或构造函数。 每个类中…...

Ubuntu安装harbor(http模式)并随便上传一个
Ubuntu安装harbor(http模式) docker和harbor的介绍就免了,都不知道啥东西,还安装搞毛 先安装docker环境 不要问,软件源之类的配置,挨个梭就行 sudo apt update sudo apt install apt-transport-https ca…...

《向量数据库指南》——腾讯云向量数据库Tencent Cloud Vector DB正式上线公测!提供10亿级向量检索能力
8月1日,腾讯云向量数据库(Tencent Cloud Vector DB)已正式上线公测。在腾讯云官网上搜索“向量数据库”,就可以正式体验该产品。 腾讯云向量数据库不仅能为大模型提供外部知识库,提高大模型回答的准确性,还可广泛应用于推荐系统、文本图像检索、自然语言处理等 AI 领域。…...
1分钟解决github push/pull报错443
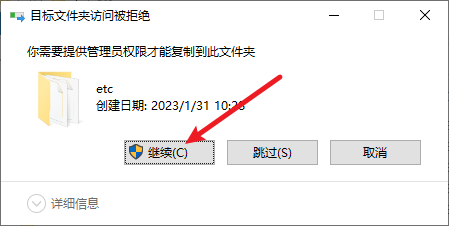
1.打开https://www.ipaddress.com/ 2.复制如图IP地址 3.文件夹打开C:\Windows\System32\drivers\etc,复制hosts文件,粘贴到桌面 4.在桌面用记事本打开复制过来的hosts 5.在末尾加上一行,IP写刚才复制的 6.复制桌面的hosts,粘贴回C:\Window…...

vue3学习-ref引用
模板引用 使用特殊的 refattribute 允许再特定的Dom或组件被挂在后,获取他的直接引用。 import { ref } form vue const input ref(null) <input ref"input"/>注意:只可以在组件挂载后才能访问模板引用 #如果你需要侦听一个模板引用 r…...
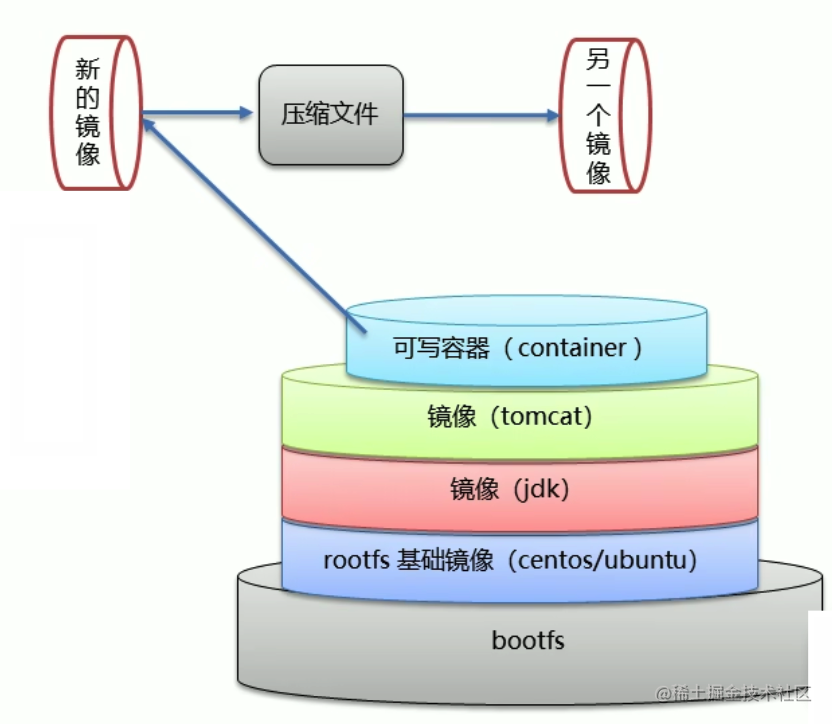
Docker 容器转为镜像
# 容器转成镜像并指定镜像名称与版本号 # commit 时原有容器挂载的目录是不会被写入到新的镜像中去的,数据卷相关的都不会生效 # 但是 root 目录下新建的内容会写入到新的镜像中去 $ docker commit 容器ID 新镜像名称:版本号 $ docker commit -m"描述信息"…...
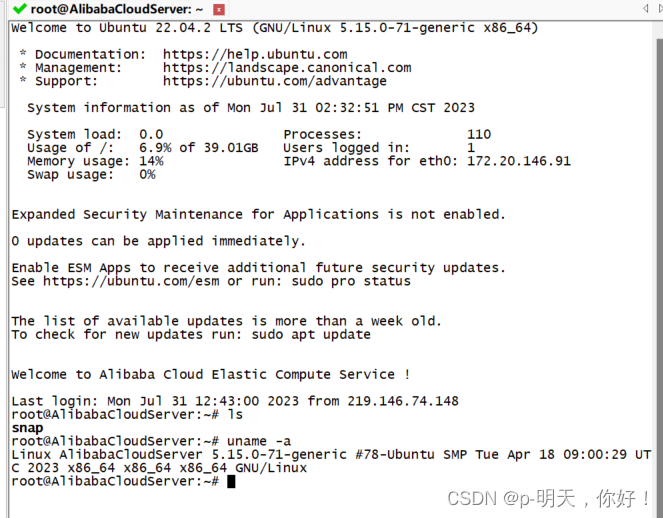
阿里云服务器免费试用及搭建WordPress网站
文章目录 前言一、免费试用1、选择使用产品2、进行产品配置3、远程连接阿里云服务器①、重置实例密码②、SecureCRT 远程链接③、Workbench 远程链接二、搭建 WordPress 网站1、开放搭建 WordPress 需要的端口2、搭建 LAMP 环境①、Linux 系统升级和更新源②、安装 Apache2③、…...
整流二极管型号汇总,超齐全
整流二极管是什么二极管?查看资料可知,整流二极管是一种将交流电能转变为直流电能的半导体器件,可见整流二极管的作用重在“整流”。整流二极管主要用于各种低频半波整流电路,如需达到全波整流需连成整流桥使用。近日,…...

MongoDB 操作命令
创建database 有就切换没有创建 useMydatabase 显示数据库:show dbs显示该database下的 bson对象 show collections 显示该bson下的具体内容**mydatabase.mycollection.find()**查询该bson对象内容**且查询****mydatabase.mycollection.find({a:,b:})****或查询****…...

markdown高级写作技巧汇总
文章目录 1 代码diff2 待办事项3 图片设置宽高4 折叠5 锚点链接实现方式① Markdown 原始写法 [名称](#id)② HTML 语法 名称 6 目录树7 换行 1 代码diff 如果你做过代码 Code Review,对下面这种效果肯定很熟悉 // 数组去重 const unique (arr)>{ - return A…...

SpringBoot自动配置原理入门级理解
简单理解 spring中,我们配置一个bean有两种方式,一种是xml标签的形式,一种是通过java类的形式。那么自动装配就是通过java类的形式来配置bean。 不同的是,springboot将这些我们需要的bean提前配置好了以java类的形式存放在META-I…...

2023 08.02 小记与展望
碎碎念系列更新 算是坚持的第一个月(每个月更新一次,上次是6.29) 主要对上月工作进行总结,并对后续学习内容进行规划。 一、关于工作 7月工作主要涉及以下方面: 1、公司自研APP维护(主要是接口更新和修改…...

微信聊天记录永久保存指南:5分钟掌握WeChatMsg完整备份方案
微信聊天记录永久保存指南:5分钟掌握WeChatMsg完整备份方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/…...
)
毕业设计 深度学习车道线检测(源码+论文)
文章目录 0 前言1 项目运行效果2 课题背景3 卷积神经网络3.1卷积层3.2 池化层3.3 激活函数:3.4 全连接层3.5 使用tensorflow中keras模块实现卷积神经网络 4 YOLOV56 数据集处理7 模型训练8 最后 0 前言 🔥这两年开始毕业设计和毕业答辩的要求和难度不断…...

Sequin实战教程:构建企业级变更数据捕获管道
Sequin实战教程:构建企业级变更数据捕获管道 【免费下载链接】sequin Postgres change data capture to streams, queues, and search indexes like Kafka, SQS, Elasticsearch, HTTP endpoints, and more 项目地址: https://gitcode.com/gh_mirrors/se/sequin …...

Python初学者项目练习23--计算圆的面积
一、练习题目 定义一个函数,这个函数用于计算并返回给定半径的圆的面积(要求结果保留两位小数) 二、代码 1.初始版本 代码如下: def area(r):"""作用:用于计算并返回给定半径的圆的面积(要求…...

Android NDK/JNI开发深度指南:从基础到实战
引言 在移动应用开发领域,Android平台以其开放性和灵活性著称。然而,当应用需要处理高性能计算、图像处理、游戏引擎或重用现有C/C++库时,纯Java实现可能面临性能瓶颈。这时,Native Development Kit(NDK)和Java Native Interface(JNI)成为关键工具。NDK允许开发者使用…...

Taotoken官方折扣活动如何切实降低模型调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken官方折扣活动如何切实降低模型调用成本 1. 成本感知:从按需付费到计划性支出 对于个人开发者或中小型团队而言…...

告别本科论文 “从零焦虑”:okbiye AI 写作如何用 “全流程定制” 终结熬夜改稿循环
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 本科论文写到崩溃,是每个毕业生都懂的痛。 我见过凌晨三点的宿舍走廊,有人对着 Word 文档掉眼泪;也见过…...

别再死记硬背二进制转换了!用Python写个自动转换工具,顺便搞懂CPU是怎么算的
用Python打造二进制转换工具:从代码实践理解CPU运算本质 当我们在编程中遇到需要处理二进制数据时,是否曾对背后的计算机原理产生好奇?本文将通过构建一个Python数制转换工具,带你穿透代码表层,深入理解CPU如何处理二…...

YimMenu:GTA V终极开源菜单的完整实战指南
YimMenu:GTA V终极开源菜单的完整实战指南 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMenu Yi…...

告别手动排班!明日方舟智能基建助手Arknights-Mower五分钟上手指南
告别手动排班!明日方舟智能基建助手Arknights-Mower五分钟上手指南 【免费下载链接】arknights-mower 《明日方舟》长草助手 项目地址: https://gitcode.com/gh_mirrors/ar/arknights-mower 还在为《明日方舟》繁琐的基建管理而头疼吗?每天重复的…...