uC-OS2 V2.93 STM32L476 移植:系统移植篇
前言
- 上一篇已经 通过
STM32CubeMX搭建了NUCLEO-L476RGSTM32L476RG 的 裸机工程,并且下载了uC-OS2 V2.93的源码,接下来,开始系统移植
开发环境
-
win10 64位
-
Keil uVision5,MDK V5.36
-
uC-OS2 V2.93
-
开发板:NUCLEO-L476RG ,MCU 为
STM32L476RG -
STM32CubeMX 6.9.1,用于生成 STM32的裸机工程
uC-OS2 目录裁剪
- 首先把 通过 Git 克隆的 uC-OS2 整个目录复制到 STM32 的工程下

-
开始裁剪 uC-OS2 的代码,首先移除 其他平台的 Port 文件,只留下
uC-OS2\Ports\ARM-Cortex-M\ARMv7-M -
如果包含 uC-OS2 下 包含
.git目录,也可以移除掉,当然也可以考虑 Git submodule 的管理

- 移除不使用的
TLS与Trace,则 uC-OS2 的代码目录如下:

添加 uC-OS2 到 Keil MDK5 工程
-
当前使用 Keil MDK5 工程管理,添加
uC-OS2PortCfg三个目录,分别对于uC-OS2目录下的三个目录,然后添加源文件,代码清单如下: -
注意不需要添加
ucos_ii.c,否则会引起编译重定义,查看这个文件,发现里面直接包含了 C 的源文件 -
注意不添加
os_dbg_r.c,否则会跟 Port 下的os_dgb.c重定义

配置头文件的路径
-
添加一下的路径到 Keil MDK5 工程
-
..\uC-OS2\Source -
..\uC-OS2\Ports\ARM-Cortex-M\ARMv7-M\ARM -
..\uC-OS2\Cfg\Template

解决编译问题
-
直接编译,发现有两个宏需要定义:
CPU_CFG_KA_IPL_BOUNDARY与CPU_CFG_NVIC_PRIO_BITS, -
修改
uC-OS2\Cfg\Template\app_cfg.h,新增这两个【宏定义】,如下
#ifndef CPU_CFG_KA_IPL_BOUNDARY
#define CPU_CFG_KA_IPL_BOUNDARY 4u
#endif#ifndef CPU_CFG_NVIC_PRIO_BITS
#define CPU_CFG_NVIC_PRIO_BITS 4u
#endif

- 经过以上的操作, uC-OS2 V2.93 在 STM32L476 上基本移植完成,接下来,可以创建几个任务,用于验证 uC-OS2 是否正常运行
小结
-
本篇注意记录 uC-OS2 V2.93 基于 Keil MDK5 ,移植到 STM32L476 平台上的操作,主要是工程的搭建,代码添加到工程
-
由于有了 Keil MDK5 的裸机工程,添加 uC-OS2 会比较的顺利,添加源文件,配置 uC-OS2 的头文件路径,定义所需的两个【宏定义】,就可以正常的编译通过
-
接下来编写 用户的任务,让 uC-OS2 运行起来,并使用 【Debug】工程,调试 uC-OS2 ,熟悉 uC-OS2 的启动流程、任务切换、各个模块的工作流程
相关文章:
uC-OS2 V2.93 STM32L476 移植:系统移植篇
前言 上一篇已经 通过 STM32CubeMX 搭建了 NUCLEO-L476RG STM32L476RG 的 裸机工程,并且下载了 uC-OS2 V2.93 的源码,接下来,开始系统移植 开发环境 win10 64位 Keil uVision5,MDK V5.36 uC-OS2 V2.93 开发板:NUC…...
gitee修改代码提交操作步骤说明
一,简介 本文主要介绍如何从gitee仓库下载文件,本地修改,本地提交,然后再push到远程服务器的操作步骤。供参考,欢迎一起讨论交流~ 二,操作步骤 总的操作步骤分为以下几步 1,远程服务器下载文…...
物联网|可变参数的使用技巧|不一样的点灯实验|访问外设的寄存器|操作寄存器实现点灯|硬件编程的基本流程-学习笔记(11)
文章目录 可变参数的使用技巧第三阶段-初级实验Lesson5:不一样的点灯实验---学习I/O的输出 ☆点灯的电路图分析1 一起看看点灯的电路图Tip1:另一种点灯的电路Tip1:如何访问外设的寄存器2 STM32F407中操作GPIO的方法 通过直接操作寄存器实现点灯实验Tip1:硬件编程的基本流程 2代…...
30. 利用linprog 解决 生产决策问题(matlab程序)
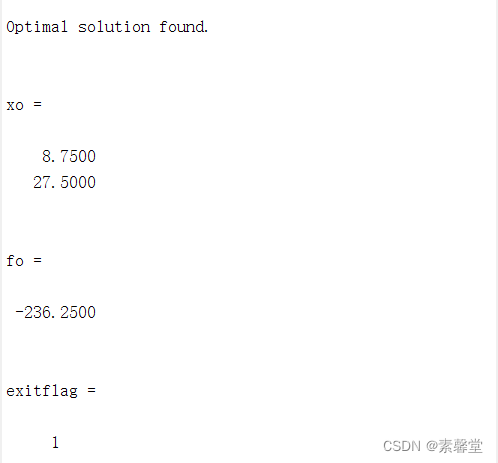
1.简述 线线规划的几个基本性质:【文献[1]第46页】 (1)线性规划问题的可行域如果非空,则是一个凸集-凸多面体; (2)如果线性规划问题有最优解,那么最优解可在可行域的顶点中确定; (3)如果可行域有界,且可行域…...
一百三十九、Kettle——Linux安装Kettle8.2
一、目的 为了方便海豚调度kettle任务,在Linux上安装kettle 二、kettle版本与前提 版本:kettle8.2 pdi-ce-8.2.0.0-342 前提:Linux已经安装好jdk 三、安装步骤 (一)打开安装包所在地 [roothurys22 ~]# cd …...

react路由在layout中的监听
业务中需要在layout里来监听路由的变化,但是layout并不是一个路由组件,所以layout组件内的props并没有location,history等属性,(路由组件:由Route组件处理的才是路由组件)所以我们需要将layout组件转变成路…...
Java反射(三)
目录 1.反射与代理设计模式 2.反射与Annotation 3.自定义Annotation 4.Annotation整合工厂设计模式和代理设计模式 1.反射与代理设计模式 代理模式是指通过业务真实类实现业务接口,再通过设置代理类创建业务真实类子类从而间接访问业务真实类。但是这存在一个弊…...

ansible-playbook roles编写lnmp剧本
目录 集中式编写lnmp剧本 执行 分布式编写lnmp剧本 一定要设置ssh免交互 nginx mysql php 执行 集中式编写lnmp剧本 vim /etc/ansible/lnmp.yml - name: lnmp playhosts: dbserversremote_user: roottasks:- name: perpare condifurecopy: src/etc/yum.repos.d/nginx.r…...

相机可用性变化监听AvailabilityCallback流程分析
相机可用性变化监听及流程分析 一、接口说明 相机可用性变化监听可以通过CameraManager中的接口registerAvailabilityCallback()来设置回调,接口如下: /** *注册一个回调以获得有关相机设备可用性的通知。 * *<p>再次注册相同的回调将用提供…...

使用Python多线程实现生产者消费者模型
“Talk is cheap, show me the code.” 废话不多说,直接上代码: """ 生产者消费者模型 Python实现 """ import queue import threading import random import timeclass ConsProd:# 队列参数_que None # 队列# 生产者…...

Notepad++工具通过正则表达式批量替换内容
1.每行末尾新增特定字符串 CtrlH弹出小窗口;查找目标输入$,替换为输入特定字符串;选中循环查找,查找模式选正则表达式;最后点击全部替换 2.每行行首新增特定字符串 CtrlH弹出小窗口;查找目标输入^&…...
从零构建深度学习推理框架-3 手写算子relu
Relu介绍: relu是一个非线性激活函数,可以避免梯度消失,过拟合等情况。我们一般将thresh设为0。 operator类: #ifndef KUIPER_COURSE_INCLUDE_OPS_OP_HPP_ #define KUIPER_COURSE_INCLUDE_OPS_OP_HPP_ namespace kuiper_infer {…...

想做上位机,学C#还是QT?
学习C#还是Qt,取决于你的具体需求和偏好。 如果你计划开发跨平台的桌面应用程序,并且希望使用一种更轻量级、直观的界面框架,那么Qt可能是一个不错的选择。Qt是一个功能丰富且成熟的跨平台框架,支持多种开发语言(包括…...
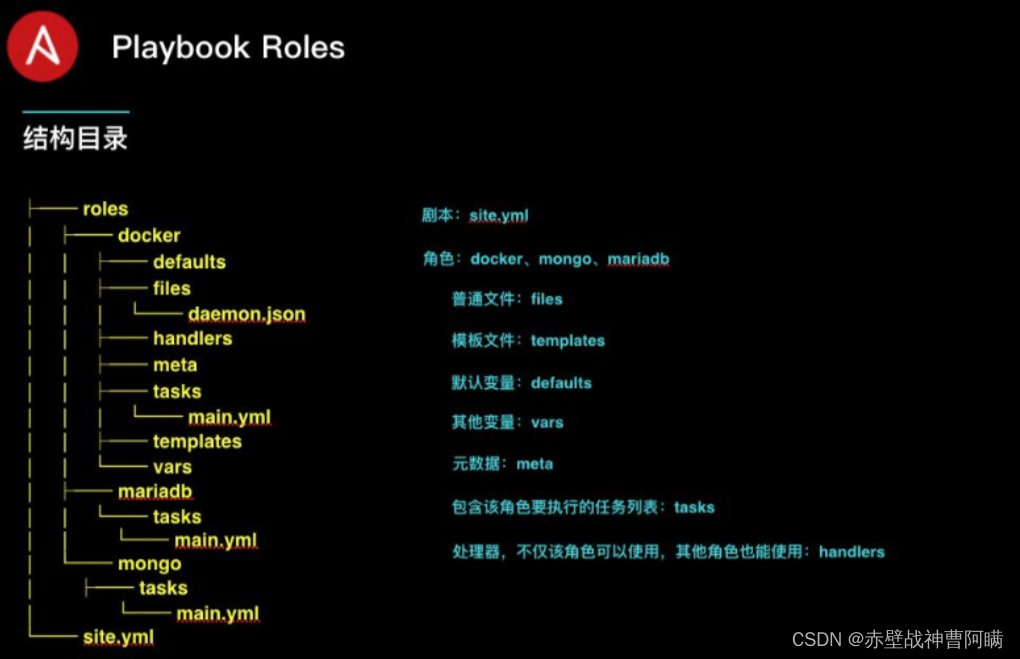
Ansible —— playbook 剧本
Ansible —— playbook 剧本 一、playbook的概述1.playbook简介2.什么是Ansible playbook剧本?3.Ansible playbook剧本的特点4.如何使用Ansible playbook剧本?5.playbooks 本身由以下各部分组成 二、playbook示例1.运行playbook2.定义、引用变量3.指定远…...

ARM寻址方式
寻址方式 寻址方式是根据指令中给出的地址码字段来实现寻找操作数地址的方式,ARM中有以下8种基本的寻址方式。 1、寄存器寻址 将寄存器中的值作为操作数,指令中的地址码字段是寄存器编号。 MOV R1,R2 ;R1 R2 ADD R0,R1,R2 ;R0 R1 R22、立即寻…...

【JAVA】String ,StringBuffer 和 StringBuilder 三者有何联系?
个人主页:【😊个人主页】 系列专栏:【❤️初识JAVA】 文章目录 前言StringBufferStringBuffer方法 StringBuilderStringBuilder方法 String ,StringBuffer 和 StringBuilder的区别String和StringBuffer互相转换 前言 在之前的文章…...
)
关于计数以及Index返回订单号升级版(控制字符长度,控制年月标记)
数据库表操作: EXEC sys.sp_dropextendedproperty nameNName , level0typeNSCHEMA,level0nameNdbo, level1typeNTABLE,level1nameNSetNoIndexGOEXEC sys.sp_dropextendedproperty nameNMS_Description , level0typeNSCHEMA,level0nameNdbo, level1typeNTABLE,level…...
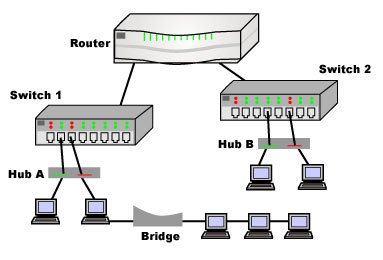
【计算机网络】11、网桥(bridge)、集线器(hub)、交换机(switch)、路由器(router)、网关(gateway)
文章目录 一、网桥(bridge)二、集线器(hub)三、交换机(switch)四、路由器(router)五、网关(gateway) 对于hub,一个包过来后,直接将包转发到其他口。 对于桥&…...

第九篇-自我任务数据准备
格式化自我意识数据用于ChatGLM微调 准备数据源 https://github.com/hiyouga/ChatGLM-Efficient-Tuning cd data self_cognition.json代码self_process.py #!/usr/bin/python # -*- coding: UTF-8 -*- # 读取self_cognition自我认知解析并写入转换新文件import json# 读取se…...
2023.8.1号论文阅读
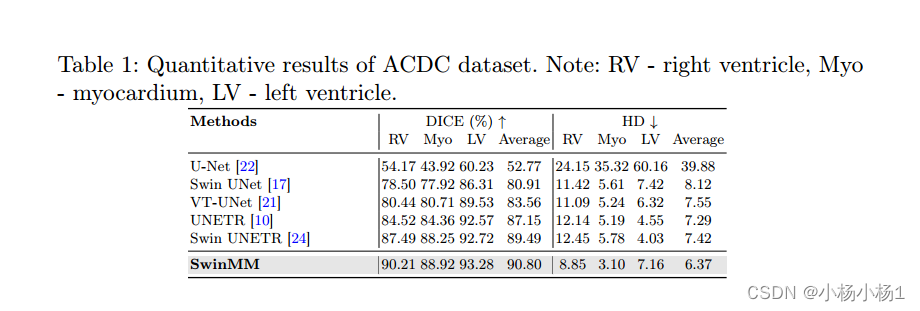
文章目录 MCPA: Multi-scale Cross Perceptron Attention Network for 2D Medical Image Segmentation摘要本文方法实验结果 SwinMM: Masked Multi-view with SwinTransformers for 3D Medical Image Segmentation摘要本文方法实验结果 MCPA: Multi-scale Cross Perceptron Att…...

不止于仿真:用MATLAB分析OFDM-QPSK系统抗噪声性能,这张误码率曲线图能告诉你什么?
从误码率曲线到系统优化:MATLAB深度解析OFDM-QPSK抗噪性能 在无线通信系统的设计与评估中,仿真分析是不可或缺的一环。当我们完成基础OFDM-QPSK系统的搭建后,如何从仿真结果中提取有价值的信息,进而指导系统优化?本文…...

手把手教你用SPI配置AD9253寄存器:从芯片手册到FPGA驱动的完整避坑指南
手把手教你用SPI配置AD9253寄存器:从芯片手册到FPGA驱动的完整避坑指南 当第一次拿到AD9253这款四通道14位高速ADC芯片时,许多工程师会被其丰富的功能和复杂的寄存器配置所困扰。本文将从一个实战工程师的角度,带你一步步完成从SPI配置到FPGA…...

不止是部署:深入webrtc-streamer容器,聊聊WebRTC网关的配置、监控与生产环境实践
不止是部署:深入webrtc-streamer容器,聊聊WebRTC网关的配置、监控与生产环境实践 当你已经成功运行了基础版的webrtc-streamer容器,看着浏览器里跳动的视频流,那种成就感不言而喻。但很快你会发现,这仅仅是WebRTC世界的…...
)
从靶场到实战:用Vulhub在Docker里一键复现Struts2全系列漏洞(S2-001到S2-053)
从靶场到实战:用Vulhub在Docker里一键复现Struts2全系列漏洞 在安全研究领域,能够快速搭建可复现的漏洞环境是每个从业者的基本功。传统方式需要手动配置Java环境、下载特定版本的Struts2框架、部署Web服务器,整个过程耗时费力且容易出错。而…...

SAE J1939请求与响应实战:用PCAN-View抓包分析‘要转速’的全过程
SAE J1939实战解析:从请求转速到数据解码的全链路操作指南 在车载诊断和商用车通信领域,SAE J1939协议如同神经系统般贯穿整个车辆架构。当工程师需要获取发动机转速这类关键参数时,协议中PGN(参数组编号)的请求与响应…...

3分钟搞定音乐格式转换:你的私人音乐解锁神器使用全攻略
3分钟搞定音乐格式转换:你的私人音乐解锁神器使用全攻略 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: htt…...

Flutter代码混淆实战指南:原理、配置与常见问题解决方案
1. 项目概述:为什么Flutter代码混淆是开发者的必修课?在Flutter应用开发中,我们常常将精力倾注于UI的丝滑流畅、功能的丰富强大,却容易忽视一个至关重要的环节——代码安全。当你的应用发布到各大应用商店,那些辛苦编写…...

实习前自我培训-Day3学习
Day3学习–MySQL 企业开发使用方式 使用命令mysql -hip地址 -P端口号 -uroot -p来连接远程的数据库 数据模型关系型数据库:建立在关系模型基础上,由多张相互连接的二维表组成的数据库特点:使用表存储数据,格式同意,便于…...

机器学习核心术语全解析:从评估指标到TensorFlow实战避坑指南
1. 项目概述与核心价值刚接触机器学习,尤其是像TensorFlow这样庞大框架的朋友,最头疼的莫过于满屏的英文术语。什么“Backpropagation”、“Softmax”、“Embedding”,每个词都认识,但组合在一起就让人云里雾里。更别提那些缩写&a…...

给企业主机穿上安全防护“黄金甲”,打造金城汤池
主机安全主要的风险来源——漏洞众所周知,软件是构成数字世界的基础,但是软件都是人为编写的,与一切皆可编程相对应的是,一切软件都存在漏洞。平均每千行代码就有4-6个安全缺陷,漏洞是网络安全的命门。但是,…...