webrtc的线程模型
目录
线程的声明
线程创建过程
向线程中投递消息
从消息队列中取消息的具体实现
处理线程消息
webrtc线程模块的实现逻辑在 rtc_base\thread.h 文件中
比如想创建一个线程:
//声明要创建的线程指针,通过智能指针管理
std::unique_ptr<rtc::Thread> video_thread_;
// 创建线程
video_thread_ = rtc::Thread::Create();
//设置新创建的线程名
video_thread_->SetName("video_thread_", video_thread_.get());
//开启线程
video_thread_->Start();
//向线程投递要处理的消息video_thread_->Post(RTC_FROM_HERE, this, MESSAGE_ID);// MESSAGE_ID 自定义的消息id//向线程投入带有消息体的消息video_thread_->Post(RTC_FROM_HERE, this, VIDEO_INFO,new rtc::TypedMessageData<VIDEO_INFO_MEESAGE>(r));//其中RTC_FROM_HERE 是个宏定义,标记线程调用的原位置
// Define a macro to record the current source location.
#define RTC_FROM_HERE RTC_FROM_HERE_WITH_FUNCTION(__FUNCTION__)下面看下线程的具体实现
线程的声明
//线程继承自一个任务队列,并且有两个存储消息的消息队列
//普通消息 messages_,延时消息 delayed_messages_
class RTC_LOCKABLE RTC_EXPORT Thread : public webrtc::TaskQueueBase {explicit Thread(SocketServer* ss);explicit Thread(std::unique_ptr<SocketServer> ss);privateMessage msgPeek_;//声明对应的消息//MessageList 具体的定义://typedef std::list<Message> MessageList;MessageList messages_ RTC_GUARDED_BY(crit_); //延时队列继承自 std::priority_queue<DelayedMessage> PriorityQueue delayed_messages_ RTC_GUARDED_BY(crit_); uint32_t delayed_next_num_ RTC_GUARDED_BY(crit_);
}创建线程的实现
//具体的创建函数
//构造中传入一个 NullSocketServer() 作为参数
std::unique_ptr<Thread> Thread::Create() {return std::unique_ptr<Thread>(new Thread(std::unique_ptr<SocketServer>(new NullSocketServer())));
}//最终调用到这里,线程构造函数
Thread::Thread(SocketServer* ss, bool do_init): fPeekKeep_(false),delayed_next_num_(0),fInitialized_(false),fDestroyed_(false),stop_(0),ss_(ss) {RTC_DCHECK(ss);//把当前线程的this指针传给 NullSocketServerss_->SetMessageQueue(this);
//设置线程的初始名字SetName("Thread", this); // default nameif (do_init) {DoInit();}
}void Thread::DoInit() {if (fInitialized_) {return;}fInitialized_ = true;//把当前线程的this指针对象传给ThreadManagerThreadManager::Add(this);
}
//ThreadManager会把当前线程,放到一个 message_queues_ 中统一管理
void ThreadManager::AddInternal(Thread* message_queue) {CritScope cs(&crit_);// Prevent changes while the list of message queues is processed.RTC_DCHECK_EQ(processing_, 0);message_queues_.push_back(message_queue);
}引入了一个新的对象 ThreadManager
//ThreadManager是线程管理类,是一个单例,
//保存创建的所有线程对象
class RTC_EXPORT ThreadManager {// Singleton, constructor and destructor are private.static ThreadManager* Instance();//保存线程的消息队列,其实是个vector,不是queue。//很多服务都喜欢用vector代替queue,srs也是把vector当queue用// This list contains all live Threads.std::vector<Thread*> message_queues_ RTC_GUARDED_BY(crit_);}
//创建单例 ThreadManager,饿汉模式
ThreadManager* ThreadManager::Instance() {static ThreadManager* const thread_manager = new ThreadManager();return thread_manager;
}
//把线程指针加入到消息队列中
void ThreadManager::Add(Thread* message_queue) {return Instance()->AddInternal(message_queue);
}
void ThreadManager::AddInternal(Thread* message_queue) {CritScope cs(&crit_);// Prevent changes while the list of message queues is processed.RTC_DCHECK_EQ(processing_, 0);message_queues_.push_back(message_queue);
}线程创建过程
线程的Start()函数才是真正创建线程的地方,只看android(即linux)端。
具体的实现是用的pthread,而没有用标准的std::thread
bool Thread::Start() {pthread_attr_t attr;pthread_attr_init(&attr);//创建线程调用的是pthread_create,//并传入线程函数 PreRunint error_code = pthread_create(&thread_, &attr, PreRun, this);if (0 != error_code) {RTC_LOG(LS_ERROR) << "Unable to create pthread, error " << error_code;thread_ = 0;return false;}
}void* Thread::PreRun(void* pv) {Thread* thread = static_cast<Thread*>(pv);ThreadManager::Instance()->SetCurrentThread(thread);rtc::SetCurrentThreadName(thread->name_.c_str());//调用一个Run()函数thread->Run();}void Thread::Run()
{
// Forever 模式,一直轮训处理ProcessMessages(kForever);
}
//真正处理消息的函数,下文会详细介绍
bool Thread::ProcessMessages(int cmsLoop)
{while (true) {Message msg;// Get()函数从消息队列中取消息 if (!Get(&msg, cmsNext))return !IsQuitting();//取出消息后调用Dispatch()进行处理Dispatch(&msg);if (cmsLoop != kForever){cmsNext = static_cast<int>(TimeUntil(msEnd));if (cmsNext < 0)return true;}} }
向线程中投递消息
// |time_sensitive| is deprecated and should always be false.virtual void Post(const Location& posted_from,//是从哪个函数向线程中投递消息MessageHandler* phandler,//消息处理的类,一般是向线程抛消息的类的this指针,当线程轮训到该消息时通过该this指针再回调对应的处理函数uint32_t id = 0,//消息idMessageData* pdata = nullptr, //消息体bool time_sensitive = false);//废弃的参数virtual void PostDelayed(const Location& posted_from, //支持向线程抛入延迟消息int delay_ms,MessageHandler* phandler,uint32_t id = 0,MessageData* pdata = nullptr);virtual void PostAt(const Location& posted_from, int64_t run_at_ms,MessageHandler* phandler,uint32_t id = 0,MessageData* pdata = nullptr);// 看下Post的具体实现void Thread::Post(const Location& posted_from,MessageHandler* phandler,uint32_t id,MessageData* pdata,bool time_sensitive) {RTC_DCHECK(!time_sensitive);if (IsQuitting()) {delete pdata;return;}// Keep thread safe// Add the message to the end of the queue// Signal for the multiplexer to return{//注意这个大括号哈//数据进队列加锁,内部用的 pthread_mutex_lock(mutex_)//CritScope对 mutex_进行了封装,构造函数加锁、析构函数解锁CritScope cs(&crit_);Message msg;//构造消息体msg.posted_from = posted_from;msg.phandler = phandler;msg.message_id = id;msg.pdata = pdata;messages_.push_back(msg);}//CritScope退出作用区域后,调用对应的析构函数解锁//即pthread_mutex_unlock(&mutex_);函数//这种实现方式一方面缩小了锁的范围,锁的范围仅仅局限于大括号内部,而不是整个Post()函数//同时,退出临界区后自动调用析构函数释放锁,也避免了死锁的可能性//这个WakeUp* 函数是重点,它会唤醒当前等待的线程WakeUpSocketServer();
}
//看一下 WakeUpSocketServer()的实现
//最终是通过 pthread_cond_broadcast()
//唤醒当前所有处于pthread_cond_wait()的线程void Thread::WakeUpSocketServer() {ss_->WakeUp();
}
void NullSocketServer::WakeUp() {event_.Set();
} void Event::Set() {pthread_mutex_lock(&event_mutex_);event_status_ = true;//广播唤醒所有处于 pthread_cond_wait()的线程pthread_cond_broadcast(&event_cond_);pthread_mutex_unlock(&event_mutex_);
}从消息队列中取消息的具体实现
//消息处理是从 Thread 的Run()函数开始
void Thread::Run() {// KForever字段,一直轮训取数据,//没有数据时会 wait() 阻塞等待ProcessMessages(kForever);
}
bool Thread::ProcessMessages(int cmsLoop) {int cmsNext = cmsLoop;while (true) {Message msg;//从消息队列中取消,//取出来后交给 Dispatch()进行处理if (!Get(&msg, cmsNext))return !IsQuitting();Dispatch(&msg);if (cmsLoop != kForever) {cmsNext = static_cast<int>(TimeUntil(msEnd));if (cmsNext < 0)return true;}}
}
//取消息的过程
bool Thread::Get(Message* pmsg, int cmsWait, bool process_io) {// Return and clear peek if present// Always return the peek if it exists so there is Peek/Get symmetryif (fPeekKeep_) {*pmsg = msgPeek_;fPeekKeep_ = false;return true;}// Get w/wait + timer scan / dispatch + socket / event multiplexer dispatchint64_t cmsTotal = cmsWait;int64_t cmsElapsed = 0;int64_t msStart = TimeMillis();int64_t msCurrent = msStart;while (true) {// Check for posted eventsint64_t cmsDelayNext = kForever; //一直训练bool first_pass = true;//具体实现是两层while(true)。内部的while负责取消息,//取不到时,外部while负责wait()阻塞等待while (true) {// All queue operations need to be locked, but nothing else in this loop// (specifically handling disposed message) can happen inside the crit.// Otherwise, disposed MessageHandlers will cause deadlocks.{//和像线程中投递消息类似,取消息时也先加锁CritScope cs(&crit_);// On the first pass, check for delayed messages that have been// triggered and calculate the next trigger time.if (first_pass) {//线程被唤醒后,只从延时队列中取一次//并且这一次会把所有到时需要处理的延时消息取完,//取出的延时消息放到messages_队列和普通消息一样进行处理first_pass = false;while (!delayed_messages_.empty()) {//当前时间,小于延时队列中第一条消息时间,//说明还没有到需要处理延时消息的时间,if (msCurrent < delayed_messages_.top().run_time_ms_) {//cmsDelayNext计算出需要等待的时间,//也是后面线程wait()时需要等待的最大时间,//因为到了这个时间,即便没有普通消息到来//延时队列中的消息也到时间需要处理了cmsDelayNext =TimeDiff(delayed_messages_.top().run_time_ms_, msCurrent);break;}//把到时需要处理的延时消息,放到普通队列中一起处理messages_.push_back(delayed_messages_.top().msg_);//延时消息出队列delayed_messages_.pop();}}// Pull a message off the message queue, if available.if (messages_.empty()) {break;} else {//真正获得需要处理消息的地方*pmsg = messages_.front();messages_.pop_front();}} // crit_ is released here.// If this was a dispose message, delete it and skip it.//如果是dispose废除的消息就会删除,//然后 continue()继续去取if (MQID_DISPOSE == pmsg->message_id) {RTC_DCHECK(nullptr == pmsg->phandler);delete pmsg->pdata;*pmsg = Message();continue;}//如果是需要处理的消息就return退出当前 Get()函数,//进行后面的Disptch()处理return true;}if (IsQuitting())break;// Which is shorter, the delay wait or the asked wait?int64_t cmsNext;if (cmsWait == kForever) {cmsNext = cmsDelayNext;} else {cmsNext = std::max<int64_t>(0, cmsTotal - cmsElapsed);if ((cmsDelayNext != kForever) && (cmsDelayNext < cmsNext))cmsNext = cmsDelayNext;}// 如果延时消息队列和普通的消息队列中都没有消息,//内部while(true)会调用 break退出//然后就调用到这里,因为我们是 KForever一直轮训模式,//所以当队列中没有消息时,防止一直遍历查询,//会通过wait()挂起当前线程让出时间片{// Wait and multiplex in the meantime//内部调用的是 pthread_cond_wait,//并且在wait()时也加了锁if (!ss_->Wait(static_cast<int>(cmsNext), process_io))return false;}// If the specified timeout expired, returnmsCurrent = TimeMillis();cmsElapsed = TimeDiff(msCurrent, msStart);if (cmsWait != kForever) {if (cmsElapsed >= cmsWait)return false;}}return false;
}处理线程消息
从消息队列中Get()获取消息后,会调用 Dispatch()处理消息。具体实现就是回调向线程中抛消息的类的OnMessage(pmg)函数,然后进行具体消息的处理:
void Thread::Dispatch(Message* pmsg) {TRACE_EVENT2("webrtc", "Thread::Dispatch", "src_file",pmsg->posted_from.file_name(), "src_func",pmsg->posted_from.function_name());int64_t start_time = TimeMillis();//回调对应OnMessage(pmsg)函数进行消息处理pmsg->phandler->OnMessage(pmsg);int64_t end_time = TimeMillis();int64_t diff = TimeDiff(end_time, start_time);if (diff >= kSlowDispatchLoggingThreshold) {RTC_LOG(LS_INFO) << "Message took " << diff<< "ms to dispatch. Posted from: "<< pmsg->posted_from.ToString();}
}而我们的处理类继承 rtc::MessageHandler,并实现了 OnMessage()函数,就可以基于对应的MessageID类型,处理不同的消息了
CVideoThread::OnMessage(rtc::Message* msg) {switch case:Message_id:handlerMessage();case VIDEO_INFO: //假如向线程中传入了 MessageData,//在线程回调时会把这个消息体带出来方便我们处理if(msg->pdata){rtc::TypedMessageData<VideoMessageData>* data = static_cast<rtc::TypedMessageData<VideoMessageData>*>(msg->pdata);string message = data->data();delete data;data = nullptr;}default:break;
}以上就是webrtc的线程模块了,下一篇会介绍webrtc的 TaskQueue 任务队列
相关文章:

webrtc的线程模型
目录 线程的声明 线程创建过程 向线程中投递消息 从消息队列中取消息的具体实现 处理线程消息 webrtc线程模块的实现逻辑在 rtc_base\thread.h 文件中 比如想创建一个线程: //声明要创建的线程指针,通过智能指针管理 std::unique_ptr<rtc::Thr…...

数据库备份还原-mysqldump、mydumper、xtrabackup、压缩
目录 数据库备份,数据库为school,素材如下 一、创建student和score表 二、为student表和score表增加记录 三、练习题 数据库备份,数据库为school,素材如下 一、创建student和score表 CREATE TABLE student ( id INT(10) NOT…...
【黑马程序员前端】JavaScript入门到精通--20230801
B站链接 理论 HTML相关知识【黑马程序员前端】 https://blog.csdn.net/m0_48964052/article/details/125951658 CSS相关知识【黑马程序员前端】 https://blog.csdn.net/m0_48964052/article/details/125951788 黑马程序员——JavaScript基础1(初识 JavaS…...
)
100道Java多线程面试题(上)
线程创建方式? 线程有哪些基本状态? 如何停止一个正在运行的线程? 有三个线程T1,T2,T3,如何保证顺序执行? 在线程中你怎么处理不可控制异常? 如何创建线程池? 以下情况如何使用线程池?高并发、任务时间短;…...
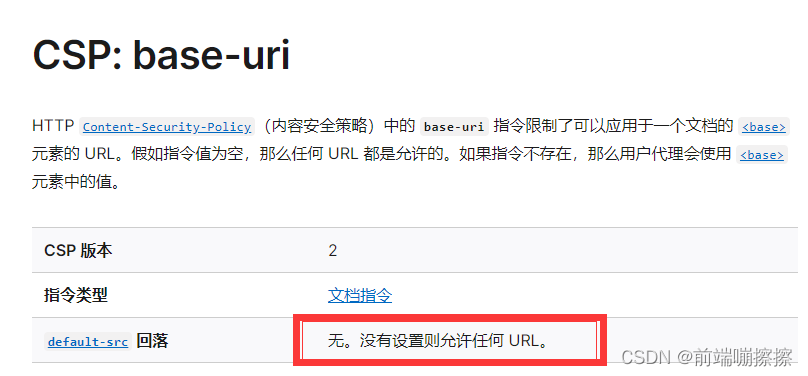
web开发中的安全和防御入门——csp (content-security-policy内容安全策略)
偶然碰到iframe跨域加载被拒绝的问题,原因是父页面默认不允许加载跨域的子页面,也就是的content-security-policy中没有设置允许跨域加载。 简单地说,content-security-policy能限制页面允许和不允许加载的所有资源,常见的包括&a…...

定了!全国2023下半年软考(高级、中级、初级)报名时间汇总
截止到2023年8月2日,有以下地区公布了软考报名时间: 安徽软考2023下半年报名时间:8月15日9:00至8月21日16:00 黑龙江软考2023下半年报名时间:8月16日至8月22日 甘肃软考2023下半年报名时间:8月28日9:00至9月6日18:00…...

Linux下安装配置Redis
文章目录 安装依赖库上传安装包并解压 启动默认启动指定配置启动开机自启 安装 依赖库 Redis是基于C语言编写的,因此首先需要安装Redis所需要的gcc依赖: yum install -y gcc tcl上传安装包并解压 将Redis安装包上传到服务器的任意目录,例…...
深度学习(33)——CycleGAN(2)
深度学习(33)——CycleGAN(2) 完整项目在在这里:欢迎造访 文章目录 深度学习(33)——CycleGAN(2)1. Generator2. Discriminator3. fake pool4. loss定义5. 模型参数量6…...
)
WeakMap and WeakSet(弱映射和弱集合)
在垃圾回收中了解JavaScript 引擎在值“可达”和可能被使用时会将其保持在内存中 let john { name: "John" }; // 该对象能被访问,john 是它的引用 // 覆盖引用 john null; // 该对象将会被从内存中清除通常,当对象、数组之类的数据结构在内…...
【Vue3基础】组件保持存活、异步加载组件
一、组件保持存活 1、需求描述 点击按钮跳转到其他组件后,原组件不会被销毁 2、知识整理 1)组件生命周期 创建期:beforeCreate、created 挂载期:beforeMount、mounted 更新期:beforeUpdate、updated 销毁期&am…...
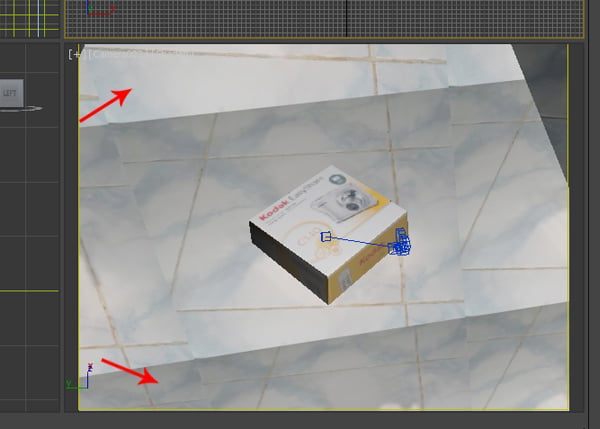
在 3ds Max 中使用相机映射将静止图像转换为实时素材
推荐: NSDT场景编辑器 助你快速搭建可二次开发的3D应用场景 1. 在 Photoshop 中准备图像 步骤 1 这是我将在教程中使用的静止图像。 这是我的静态相机纸箱的快照。 静止图像 步骤 2 打开 Photoshop。将图像导入 Photoshop。 打开 Photoshop 步骤 3 单击套索工…...

如何使用GIL解决Python多线程性能瓶颈
如何使用GIL解决Python多线程性能瓶颈 引言: Python是一种使用广泛的编程语言,但其在多线程方面存在一个性能瓶颈,即全局解释器锁(Global Interpreter Lock,简称GIL)。GIL会限制Python的多线程并行能力&am…...

k8s概念-深入pod
回到目录 工作负载(workloads) 工作负载(workload)是在kubernetes集群中运行的应用程序。无论你的工作负载是单一服务还是多个一同工作的服务构成,在kubernetes中都可以使用pod来运行它 workloads分为pod与control…...

Web服务器实验案例
目录 关闭或放行防火墙和selinux 1 搭建静态网站 2 建立两个基于ip地址访问的网站 思路: 简单配置 编写httpd额外文件 3 建立两个基于不同端口访问的网站 思路 创建文件(与之前一致) 额外文件配置 4 基于虚拟目录和用户控制的web网…...

预警 项目经验BUG
文章目录 定时任务 定时任务 在方法上使用Scheduled注解 cron参数: cron是一个表达式,最多接收7个参数从左到右分别表示:秒 分 时 天 月 周 年参数以空格隔开,其中年不是必须参数,可以省略。示例:Schedule…...

基于RFID技术的猪舍门读卡器
随着科技的发展和普及,智能化管理在各个领域的应用越来越广泛。在畜牧业中,将RFID技术应用在养殖管理中的企业也越来越多,为养殖企业的智能化管理提供了有力的支持,本文将介绍RFID技术的猪舍门读卡器的应用。 一、RFID技术简介 …...

亚马逊店铺的回款周期是多久?
现如今,开亚马逊店铺可是一个技术活,一旦有一个环节,或者是一件事情没有做好,对整个亚马逊店铺过程中影响都是十分巨大的,不少亚马逊卖家就吃过这方面的亏。 很多亚马逊卖家就是吃亏在这些方面,现在要想开…...
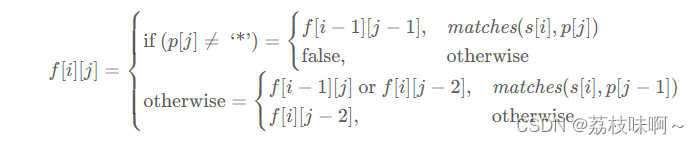
剑指offer19.正则表达式
这道题我一看就有印象,我室友算法课设抽到这题,他当时有个bug让我帮他看一下,然后我就大概看了一下他的算法,他是用动态规划写的,用了一个二维数组,然后我就试着按照这个思路去写,想了一会还是没…...

Mac Navicat 16试用脚本
一、无限试用脚本如下 #!/bin/bash #/usr/libexec/PlistBuddy -c "print" ~/Library/Preferences/com.navicat.NavicatPremium.plist /usr/libexec/PlistBuddy -c "Delete :91F6C435D172C8163E0689D3DAD3F3E9" ~/Library/Preferences/com.navicat.Navica…...

什么是 webpack?
Webpack 介绍 什么是 webpack? :::tip 官方描述 webpack 是一个用于现代 JavaScript 应用程序的静态模块打包工具。当 webpack 处理应用程序时,它会在内部从一个或多个入口点构建一个 依赖图(dependency graph),然后将你项目中所需的每一个…...

2026在线测评系统十大量表对比:信效度与场景全解析
【30s 核心摘要】2026 年在线测评成人才管理刚需,信效度与场景适配成选型核心。本文聚焦十大量表,从信度、效度、适配场景等维度深度对比,重点解析问卷星、北森、金数据等主流平台的量表能力与落地效果,为企业、高校及机构提供科学…...

如何在macOS上免费解锁QQ音乐加密文件:完整指南
如何在macOS上免费解锁QQ音乐加密文件:完整指南 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默认转换结果…...

2026 新视角:化妆品开发的底层逻辑,做好一款产品,从选对原料开始
在化妆品研发链条中,配方架构、生产工艺、包装设计固然重要,但决定一款产品上限的,永远是原料。一款稳定、安全、表现优异的护肤成品,离不开纯净、达标、批次一致的优质原料。对于品牌方、配方师、代工企业而言,原料不…...

贵阳婚礼西服定制攻略:面料、工艺、版型避坑指南
婚礼西装是男士婚礼造型的核心,区别于日常商务正装,婚礼西服更看重版型精致度、面料质感、上身挺拔感以及镜头适配度。在贵阳备婚的新人,大多会放弃成品西装,选择专属定制服务。但本地婚礼西服定制市场参差不齐,很多新…...

新能源车轻量化为什么开始盯上高强镁合金?
续航,是悬在每一台纯电动汽车头上的达摩克利斯之剑。多充一度电、多堆一些正极材料,是一条路;但还有另一条路——把车造得更轻。 SAE(美国汽车工程师学会)的测算已经被反复引用:整车每减重100千克ÿ…...

同步带装配工艺要点与损伤防控策略
一、引言在工业精密传动系统中,盖茨同步带凭借高精度、高效率、无滑差的优势,成为自动化设备、精密机床、输送产线的核心传动部件。多数企业在运维中,普遍将同步带异常磨损、断齿、断带等故障归咎于工况恶劣或产品质量问题,却忽略…...

INT8量化下TVA注意力对齐精度保障方案
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

LVGL多页面开发避坑:用内部Timer替代轮询,解决页面切换时的内存踩踏问题
LVGL多页面开发中的内存安全实践:用Timer机制替代轮询的工程解决方案 在嵌入式UI开发中,LVGL因其轻量级和跨平台特性成为热门选择。但当项目复杂度提升到多页面交互时,开发者往往会遇到一个棘手问题:如何在频繁切换页面的同时保证…...

我们公司全员把 Cursor 换成了自研的 全开源AtomCode
【引子】这是一篇实录——一位 CTO 用 28 天,用 Claude GLM 双模型调度,造出了一个让全公司放弃 Cursor 的工具。然后我意识到我们正在经历的事情,比"换工具"大得多。【读者承诺】接下来 15 分钟,你会拿到三件东西:一个真实案例(28 天 1,146 commits 是怎么做出来的…...

JWT弱密钥爆破实战:从HS256签名原理到CTF权限提升
1. 这不是密码学考试,而是一场“密钥猜谜”实战JWT(JSON Web Token)在现代Web系统中早已不是可选项,而是默认配置。登录成功后返回一串形如eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJ1c2VyX2lkIjoxMjMsIm5hbWUiOiLnlKjliYkiLCJpYX…...