error: #5: cannot open source input file “core_cmInstr.h“
GD32F103VET6和STM32F103VET6引脚兼容。
GD32F103VET6工程模板需要包含头文件:core_cmInstr.h和core_cmFunc.h,这个和STM32F103还是有区别的,否则会报错,如下:
error: #5: cannot open source input file "core_cmInstr.h": No such file or directory
贴出来,以便大家去下载,还要积分,找得还辛苦。
/**************************************************************************//*** @file core_cmFunc.h* @brief CMSIS Cortex-M Core Function Access Header File* @version V3.02* @date 24. May 2012** @note* Copyright (C) 2009-2012 ARM Limited. All rights reserved.** @par* ARM Limited (ARM) is supplying this software for use with Cortex-M* processor based microcontrollers. This file can be freely distributed* within development tools that are supporting such ARM based processors.** @par* THIS SOFTWARE IS PROVIDED "AS IS". NO WARRANTIES, WHETHER EXPRESS, IMPLIED* OR STATUTORY, INCLUDING, BUT NOT LIMITED TO, IMPLIED WARRANTIES OF* MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE.* ARM SHALL NOT, IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR* CONSEQUENTIAL DAMAGES, FOR ANY REASON WHATSOEVER.*******************************************************************************/#ifndef __CORE_CMFUNC_H
#define __CORE_CMFUNC_H/* ########################### Core Function Access ########################### */
/** \ingroup CMSIS_Core_FunctionInterface\defgroup CMSIS_Core_RegAccFunctions CMSIS Core Register Access Functions@{*/#if defined ( __CC_ARM ) /*------------------RealView Compiler -----------------*/
/* ARM armcc specific functions */#if (__ARMCC_VERSION < 400677)#error "Please use ARM Compiler Toolchain V4.0.677 or later!"
#endif/* intrinsic void __enable_irq(); */
/* intrinsic void __disable_irq(); *//** \brief Get Control RegisterThis function returns the content of the Control Register.\return Control Register value*/
__STATIC_INLINE uint32_t __get_CONTROL(void)
{register uint32_t __regControl __ASM("control");return(__regControl);
}/** \brief Set Control RegisterThis function writes the given value to the Control Register.\param [in] control Control Register value to set*/
__STATIC_INLINE void __set_CONTROL(uint32_t control)
{register uint32_t __regControl __ASM("control");__regControl = control;
}/** \brief Get IPSR RegisterThis function returns the content of the IPSR Register.\return IPSR Register value*/
__STATIC_INLINE uint32_t __get_IPSR(void)
{register uint32_t __regIPSR __ASM("ipsr");return(__regIPSR);
}/** \brief Get APSR RegisterThis function returns the content of the APSR Register.\return APSR Register value*/
__STATIC_INLINE uint32_t __get_APSR(void)
{register uint32_t __regAPSR __ASM("apsr");return(__regAPSR);
}/** \brief Get xPSR RegisterThis function returns the content of the xPSR Register.\return xPSR Register value*/
__STATIC_INLINE uint32_t __get_xPSR(void)
{register uint32_t __regXPSR __ASM("xpsr");return(__regXPSR);
}/** \brief Get Process Stack PointerThis function returns the current value of the Process Stack Pointer (PSP).\return PSP Register value*/
__STATIC_INLINE uint32_t __get_PSP(void)
{register uint32_t __regProcessStackPointer __ASM("psp");return(__regProcessStackPointer);
}/** \brief Set Process Stack PointerThis function assigns the given value to the Process Stack Pointer (PSP).\param [in] topOfProcStack Process Stack Pointer value to set*/
__STATIC_INLINE void __set_PSP(uint32_t topOfProcStack)
{register uint32_t __regProcessStackPointer __ASM("psp");__regProcessStackPointer = topOfProcStack;
}/** \brief Get Main Stack PointerThis function returns the current value of the Main Stack Pointer (MSP).\return MSP Register value*/
__STATIC_INLINE uint32_t __get_MSP(void)
{register uint32_t __regMainStackPointer __ASM("msp");return(__regMainStackPointer);
}/** \brief Set Main Stack PointerThis function assigns the given value to the Main Stack Pointer (MSP).\param [in] topOfMainStack Main Stack Pointer value to set*/
__STATIC_INLINE void __set_MSP(uint32_t topOfMainStack)
{register uint32_t __regMainStackPointer __ASM("msp");__regMainStackPointer = topOfMainStack;
}/** \brief Get Priority MaskThis function returns the current state of the priority mask bit from the Priority Mask Register.\return Priority Mask value*/
__STATIC_INLINE uint32_t __get_PRIMASK(void)
{register uint32_t __regPriMask __ASM("primask");return(__regPriMask);
}/** \brief Set Priority MaskThis function assigns the given value to the Priority Mask Register.\param [in] priMask Priority Mask*/
__STATIC_INLINE void __set_PRIMASK(uint32_t priMask)
{register uint32_t __regPriMask __ASM("primask");__regPriMask = (priMask);
}#if (__CORTEX_M >= 0x03)/** \brief Enable FIQThis function enables FIQ interrupts by clearing the F-bit in the CPSR.Can only be executed in Privileged modes.*/
#define __enable_fault_irq __enable_fiq/** \brief Disable FIQThis function disables FIQ interrupts by setting the F-bit in the CPSR.Can only be executed in Privileged modes.*/
#define __disable_fault_irq __disable_fiq/** \brief Get Base PriorityThis function returns the current value of the Base Priority register.\return Base Priority register value*/
__STATIC_INLINE uint32_t __get_BASEPRI(void)
{register uint32_t __regBasePri __ASM("basepri");return(__regBasePri);
}/** \brief Set Base PriorityThis function assigns the given value to the Base Priority register.\param [in] basePri Base Priority value to set*/
__STATIC_INLINE void __set_BASEPRI(uint32_t basePri)
{register uint32_t __regBasePri __ASM("basepri");__regBasePri = (basePri & 0xff);
}/** \brief Get Fault MaskThis function returns the current value of the Fault Mask register.\return Fault Mask register value*/
__STATIC_INLINE uint32_t __get_FAULTMASK(void)
{register uint32_t __regFaultMask __ASM("faultmask");return(__regFaultMask);
}/** \brief Set Fault MaskThis function assigns the given value to the Fault Mask register.\param [in] faultMask Fault Mask value to set*/
__STATIC_INLINE void __set_FAULTMASK(uint32_t faultMask)
{register uint32_t __regFaultMask __ASM("faultmask");__regFaultMask = (faultMask & (uint32_t)1);
}#endif /* (__CORTEX_M >= 0x03) */#if (__CORTEX_M == 0x04)/** \brief Get FPSCRThis function returns the current value of the Floating Point Status/Control register.\return Floating Point Status/Control register value*/
__STATIC_INLINE uint32_t __get_FPSCR(void)
{
#if (__FPU_PRESENT == 1) && (__FPU_USED == 1)register uint32_t __regfpscr __ASM("fpscr");return(__regfpscr);
#elsereturn(0);
#endif
}/** \brief Set FPSCRThis function assigns the given value to the Floating Point Status/Control register.\param [in] fpscr Floating Point Status/Control value to set*/
__STATIC_INLINE void __set_FPSCR(uint32_t fpscr)
{
#if (__FPU_PRESENT == 1) && (__FPU_USED == 1)register uint32_t __regfpscr __ASM("fpscr");__regfpscr = (fpscr);
#endif
}#endif /* (__CORTEX_M == 0x04) */#elif defined ( __ICCARM__ ) /*------------------ ICC Compiler -------------------*/
/* IAR iccarm specific functions */#include <cmsis_iar.h>#elif defined ( __TMS470__ ) /*---------------- TI CCS Compiler ------------------*/
/* TI CCS specific functions */#include <cmsis_ccs.h>#elif defined ( __GNUC__ ) /*------------------ GNU Compiler ---------------------*/
/* GNU gcc specific functions *//** \brief Enable IRQ InterruptsThis function enables IRQ interrupts by clearing the I-bit in the CPSR.Can only be executed in Privileged modes.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __enable_irq(void)
{__ASM volatile ("cpsie i" : : : "memory");
}/** \brief Disable IRQ InterruptsThis function disables IRQ interrupts by setting the I-bit in the CPSR.Can only be executed in Privileged modes.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __disable_irq(void)
{__ASM volatile ("cpsid i" : : : "memory");
}/** \brief Get Control RegisterThis function returns the content of the Control Register.\return Control Register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_CONTROL(void)
{uint32_t result;__ASM volatile ("MRS %0, control" : "=r" (result) );return(result);
}/** \brief Set Control RegisterThis function writes the given value to the Control Register.\param [in] control Control Register value to set*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_CONTROL(uint32_t control)
{__ASM volatile ("MSR control, %0" : : "r" (control) );
}/** \brief Get IPSR RegisterThis function returns the content of the IPSR Register.\return IPSR Register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_IPSR(void)
{uint32_t result;__ASM volatile ("MRS %0, ipsr" : "=r" (result) );return(result);
}/** \brief Get APSR RegisterThis function returns the content of the APSR Register.\return APSR Register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_APSR(void)
{uint32_t result;__ASM volatile ("MRS %0, apsr" : "=r" (result) );return(result);
}/** \brief Get xPSR RegisterThis function returns the content of the xPSR Register.\return xPSR Register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_xPSR(void)
{uint32_t result;__ASM volatile ("MRS %0, xpsr" : "=r" (result) );return(result);
}/** \brief Get Process Stack PointerThis function returns the current value of the Process Stack Pointer (PSP).\return PSP Register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_PSP(void)
{register uint32_t result;__ASM volatile ("MRS %0, psp\n" : "=r" (result) );return(result);
}/** \brief Set Process Stack PointerThis function assigns the given value to the Process Stack Pointer (PSP).\param [in] topOfProcStack Process Stack Pointer value to set*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_PSP(uint32_t topOfProcStack)
{__ASM volatile ("MSR psp, %0\n" : : "r" (topOfProcStack) );
}/** \brief Get Main Stack PointerThis function returns the current value of the Main Stack Pointer (MSP).\return MSP Register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_MSP(void)
{register uint32_t result;__ASM volatile ("MRS %0, msp\n" : "=r" (result) );return(result);
}/** \brief Set Main Stack PointerThis function assigns the given value to the Main Stack Pointer (MSP).\param [in] topOfMainStack Main Stack Pointer value to set*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_MSP(uint32_t topOfMainStack)
{__ASM volatile ("MSR msp, %0\n" : : "r" (topOfMainStack) );
}/** \brief Get Priority MaskThis function returns the current state of the priority mask bit from the Priority Mask Register.\return Priority Mask value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_PRIMASK(void)
{uint32_t result;__ASM volatile ("MRS %0, primask" : "=r" (result) );return(result);
}/** \brief Set Priority MaskThis function assigns the given value to the Priority Mask Register.\param [in] priMask Priority Mask*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_PRIMASK(uint32_t priMask)
{__ASM volatile ("MSR primask, %0" : : "r" (priMask) );
}#if (__CORTEX_M >= 0x03)/** \brief Enable FIQThis function enables FIQ interrupts by clearing the F-bit in the CPSR.Can only be executed in Privileged modes.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __enable_fault_irq(void)
{__ASM volatile ("cpsie f" : : : "memory");
}/** \brief Disable FIQThis function disables FIQ interrupts by setting the F-bit in the CPSR.Can only be executed in Privileged modes.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __disable_fault_irq(void)
{__ASM volatile ("cpsid f" : : : "memory");
}/** \brief Get Base PriorityThis function returns the current value of the Base Priority register.\return Base Priority register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_BASEPRI(void)
{uint32_t result;__ASM volatile ("MRS %0, basepri_max" : "=r" (result) );return(result);
}/** \brief Set Base PriorityThis function assigns the given value to the Base Priority register.\param [in] basePri Base Priority value to set*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_BASEPRI(uint32_t value)
{__ASM volatile ("MSR basepri, %0" : : "r" (value) );
}/** \brief Get Fault MaskThis function returns the current value of the Fault Mask register.\return Fault Mask register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_FAULTMASK(void)
{uint32_t result;__ASM volatile ("MRS %0, faultmask" : "=r" (result) );return(result);
}/** \brief Set Fault MaskThis function assigns the given value to the Fault Mask register.\param [in] faultMask Fault Mask value to set*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_FAULTMASK(uint32_t faultMask)
{__ASM volatile ("MSR faultmask, %0" : : "r" (faultMask) );
}#endif /* (__CORTEX_M >= 0x03) */#if (__CORTEX_M == 0x04)/** \brief Get FPSCRThis function returns the current value of the Floating Point Status/Control register.\return Floating Point Status/Control register value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __get_FPSCR(void)
{
#if (__FPU_PRESENT == 1) && (__FPU_USED == 1)uint32_t result;__ASM volatile ("VMRS %0, fpscr" : "=r" (result) );return(result);
#elsereturn(0);
#endif
}/** \brief Set FPSCRThis function assigns the given value to the Floating Point Status/Control register.\param [in] fpscr Floating Point Status/Control value to set*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __set_FPSCR(uint32_t fpscr)
{
#if (__FPU_PRESENT == 1) && (__FPU_USED == 1)__ASM volatile ("VMSR fpscr, %0" : : "r" (fpscr) );
#endif
}#endif /* (__CORTEX_M == 0x04) */#elif defined ( __TASKING__ ) /*------------------ TASKING Compiler --------------*/
/* TASKING carm specific functions *//** The CMSIS functions have been implemented as intrinsics in the compiler.* Please use "carm -?i" to get an up to date list of all instrinsics,* Including the CMSIS ones.*/#endif/*@} end of CMSIS_Core_RegAccFunctions */#endif /* __CORE_CMFUNC_H *//**************************************************************************//*** @file core_cmInstr.h* @brief CMSIS Cortex-M Core Instruction Access Header File* @version V3.02* @date 08. May 2012** @note* Copyright (C) 2009-2012 ARM Limited. All rights reserved.** @par* ARM Limited (ARM) is supplying this software for use with Cortex-M* processor based microcontrollers. This file can be freely distributed* within development tools that are supporting such ARM based processors.** @par* THIS SOFTWARE IS PROVIDED "AS IS". NO WARRANTIES, WHETHER EXPRESS, IMPLIED* OR STATUTORY, INCLUDING, BUT NOT LIMITED TO, IMPLIED WARRANTIES OF* MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE.* ARM SHALL NOT, IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR* CONSEQUENTIAL DAMAGES, FOR ANY REASON WHATSOEVER.*******************************************************************************/#ifndef __CORE_CMINSTR_H
#define __CORE_CMINSTR_H/* ########################## Core Instruction Access ######################### */
/** \defgroup CMSIS_Core_InstructionInterface CMSIS Core Instruction InterfaceAccess to dedicated instructions@{
*/#if defined ( __CC_ARM ) /*------------------RealView Compiler -----------------*/
/* ARM armcc specific functions */#if (__ARMCC_VERSION < 400677)#error "Please use ARM Compiler Toolchain V4.0.677 or later!"
#endif/** \brief No OperationNo Operation does nothing. This instruction can be used for code alignment purposes.*/
#define __NOP __nop/** \brief Wait For InterruptWait For Interrupt is a hint instruction that suspends executionuntil one of a number of events occurs.*/
#define __WFI __wfi/** \brief Wait For EventWait For Event is a hint instruction that permits the processor to entera low-power state until one of a number of events occurs.*/
#define __WFE __wfe/** \brief Send EventSend Event is a hint instruction. It causes an event to be signaled to the CPU.*/
#define __SEV __sev/** \brief Instruction Synchronization BarrierInstruction Synchronization Barrier flushes the pipeline in the processor,so that all instructions following the ISB are fetched from cache ormemory, after the instruction has been completed.*/
#define __ISB() __isb(0xF)/** \brief Data Synchronization BarrierThis function acts as a special kind of Data Memory Barrier.It completes when all explicit memory accesses before this instruction complete.*/
#define __DSB() __dsb(0xF)/** \brief Data Memory BarrierThis function ensures the apparent order of the explicit memory operations beforeand after the instruction, without ensuring their completion.*/
#define __DMB() __dmb(0xF)/** \brief Reverse byte order (32 bit)This function reverses the byte order in integer value.\param [in] value Value to reverse\return Reversed value*/
#define __REV __rev/** \brief Reverse byte order (16 bit)This function reverses the byte order in two unsigned short values.\param [in] value Value to reverse\return Reversed value*/
#ifndef __NO_EMBEDDED_ASM
__attribute__((section(".rev16_text"))) __STATIC_INLINE __ASM uint32_t __REV16(uint32_t value)
{rev16 r0, r0bx lr
}
#endif/** \brief Reverse byte order in signed short valueThis function reverses the byte order in a signed short value with sign extension to integer.\param [in] value Value to reverse\return Reversed value*/
#ifndef __NO_EMBEDDED_ASM
__attribute__((section(".revsh_text"))) __STATIC_INLINE __ASM int32_t __REVSH(int32_t value)
{revsh r0, r0bx lr
}
#endif/** \brief Rotate Right in unsigned value (32 bit)This function Rotate Right (immediate) provides the value of the contents of a register rotated by a variable number of bits.\param [in] value Value to rotate\param [in] value Number of Bits to rotate\return Rotated value*/
#define __ROR __ror#if (__CORTEX_M >= 0x03)/** \brief Reverse bit order of valueThis function reverses the bit order of the given value.\param [in] value Value to reverse\return Reversed value*/
#define __RBIT __rbit/** \brief LDR Exclusive (8 bit)This function performs a exclusive LDR command for 8 bit value.\param [in] ptr Pointer to data\return value of type uint8_t at (*ptr)*/
#define __LDREXB(ptr) ((uint8_t ) __ldrex(ptr))/** \brief LDR Exclusive (16 bit)This function performs a exclusive LDR command for 16 bit values.\param [in] ptr Pointer to data\return value of type uint16_t at (*ptr)*/
#define __LDREXH(ptr) ((uint16_t) __ldrex(ptr))/** \brief LDR Exclusive (32 bit)This function performs a exclusive LDR command for 32 bit values.\param [in] ptr Pointer to data\return value of type uint32_t at (*ptr)*/
#define __LDREXW(ptr) ((uint32_t ) __ldrex(ptr))/** \brief STR Exclusive (8 bit)This function performs a exclusive STR command for 8 bit values.\param [in] value Value to store\param [in] ptr Pointer to location\return 0 Function succeeded\return 1 Function failed*/
#define __STREXB(value, ptr) __strex(value, ptr)/** \brief STR Exclusive (16 bit)This function performs a exclusive STR command for 16 bit values.\param [in] value Value to store\param [in] ptr Pointer to location\return 0 Function succeeded\return 1 Function failed*/
#define __STREXH(value, ptr) __strex(value, ptr)/** \brief STR Exclusive (32 bit)This function performs a exclusive STR command for 32 bit values.\param [in] value Value to store\param [in] ptr Pointer to location\return 0 Function succeeded\return 1 Function failed*/
#define __STREXW(value, ptr) __strex(value, ptr)/** \brief Remove the exclusive lockThis function removes the exclusive lock which is created by LDREX.*/
#define __CLREX __clrex/** \brief Signed SaturateThis function saturates a signed value.\param [in] value Value to be saturated\param [in] sat Bit position to saturate to (1..32)\return Saturated value*/
#define __SSAT __ssat/** \brief Unsigned SaturateThis function saturates an unsigned value.\param [in] value Value to be saturated\param [in] sat Bit position to saturate to (0..31)\return Saturated value*/
#define __USAT __usat/** \brief Count leading zerosThis function counts the number of leading zeros of a data value.\param [in] value Value to count the leading zeros\return number of leading zeros in value*/
#define __CLZ __clz#endif /* (__CORTEX_M >= 0x03) */#elif defined ( __ICCARM__ ) /*------------------ ICC Compiler -------------------*/
/* IAR iccarm specific functions */#include <cmsis_iar.h>#elif defined ( __TMS470__ ) /*---------------- TI CCS Compiler ------------------*/
/* TI CCS specific functions */#include <cmsis_ccs.h>#elif defined ( __GNUC__ ) /*------------------ GNU Compiler ---------------------*/
/* GNU gcc specific functions *//** \brief No OperationNo Operation does nothing. This instruction can be used for code alignment purposes.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __NOP(void)
{__ASM volatile ("nop");
}/** \brief Wait For InterruptWait For Interrupt is a hint instruction that suspends executionuntil one of a number of events occurs.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __WFI(void)
{__ASM volatile ("wfi");
}/** \brief Wait For EventWait For Event is a hint instruction that permits the processor to entera low-power state until one of a number of events occurs.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __WFE(void)
{__ASM volatile ("wfe");
}/** \brief Send EventSend Event is a hint instruction. It causes an event to be signaled to the CPU.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __SEV(void)
{__ASM volatile ("sev");
}/** \brief Instruction Synchronization BarrierInstruction Synchronization Barrier flushes the pipeline in the processor,so that all instructions following the ISB are fetched from cache ormemory, after the instruction has been completed.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __ISB(void)
{__ASM volatile ("isb");
}/** \brief Data Synchronization BarrierThis function acts as a special kind of Data Memory Barrier.It completes when all explicit memory accesses before this instruction complete.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __DSB(void)
{__ASM volatile ("dsb");
}/** \brief Data Memory BarrierThis function ensures the apparent order of the explicit memory operations beforeand after the instruction, without ensuring their completion.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __DMB(void)
{__ASM volatile ("dmb");
}/** \brief Reverse byte order (32 bit)This function reverses the byte order in integer value.\param [in] value Value to reverse\return Reversed value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __REV(uint32_t value)
{uint32_t result;__ASM volatile ("rev %0, %1" : "=r" (result) : "r" (value) );return(result);
}/** \brief Reverse byte order (16 bit)This function reverses the byte order in two unsigned short values.\param [in] value Value to reverse\return Reversed value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __REV16(uint32_t value)
{uint32_t result;__ASM volatile ("rev16 %0, %1" : "=r" (result) : "r" (value) );return(result);
}/** \brief Reverse byte order in signed short valueThis function reverses the byte order in a signed short value with sign extension to integer.\param [in] value Value to reverse\return Reversed value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE int32_t __REVSH(int32_t value)
{uint32_t result;__ASM volatile ("revsh %0, %1" : "=r" (result) : "r" (value) );return(result);
}/** \brief Rotate Right in unsigned value (32 bit)This function Rotate Right (immediate) provides the value of the contents of a register rotated by a variable number of bits.\param [in] value Value to rotate\param [in] value Number of Bits to rotate\return Rotated value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __ROR(uint32_t op1, uint32_t op2)
{__ASM volatile ("ror %0, %0, %1" : "+r" (op1) : "r" (op2) );return(op1);
}#if (__CORTEX_M >= 0x03)/** \brief Reverse bit order of valueThis function reverses the bit order of the given value.\param [in] value Value to reverse\return Reversed value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __RBIT(uint32_t value)
{uint32_t result;__ASM volatile ("rbit %0, %1" : "=r" (result) : "r" (value) );return(result);
}/** \brief LDR Exclusive (8 bit)This function performs a exclusive LDR command for 8 bit value.\param [in] ptr Pointer to data\return value of type uint8_t at (*ptr)*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint8_t __LDREXB(volatile uint8_t *addr)
{uint8_t result;__ASM volatile ("ldrexb %0, [%1]" : "=r" (result) : "r" (addr) );return(result);
}/** \brief LDR Exclusive (16 bit)This function performs a exclusive LDR command for 16 bit values.\param [in] ptr Pointer to data\return value of type uint16_t at (*ptr)*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint16_t __LDREXH(volatile uint16_t *addr)
{uint16_t result;__ASM volatile ("ldrexh %0, [%1]" : "=r" (result) : "r" (addr) );return(result);
}/** \brief LDR Exclusive (32 bit)This function performs a exclusive LDR command for 32 bit values.\param [in] ptr Pointer to data\return value of type uint32_t at (*ptr)*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __LDREXW(volatile uint32_t *addr)
{uint32_t result;__ASM volatile ("ldrex %0, [%1]" : "=r" (result) : "r" (addr) );return(result);
}/** \brief STR Exclusive (8 bit)This function performs a exclusive STR command for 8 bit values.\param [in] value Value to store\param [in] ptr Pointer to location\return 0 Function succeeded\return 1 Function failed*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __STREXB(uint8_t value, volatile uint8_t *addr)
{uint32_t result;__ASM volatile ("strexb %0, %2, [%1]" : "=&r" (result) : "r" (addr), "r" (value) );return(result);
}/** \brief STR Exclusive (16 bit)This function performs a exclusive STR command for 16 bit values.\param [in] value Value to store\param [in] ptr Pointer to location\return 0 Function succeeded\return 1 Function failed*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __STREXH(uint16_t value, volatile uint16_t *addr)
{uint32_t result;__ASM volatile ("strexh %0, %2, [%1]" : "=&r" (result) : "r" (addr), "r" (value) );return(result);
}/** \brief STR Exclusive (32 bit)This function performs a exclusive STR command for 32 bit values.\param [in] value Value to store\param [in] ptr Pointer to location\return 0 Function succeeded\return 1 Function failed*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint32_t __STREXW(uint32_t value, volatile uint32_t *addr)
{uint32_t result;__ASM volatile ("strex %0, %2, [%1]" : "=&r" (result) : "r" (addr), "r" (value) );return(result);
}/** \brief Remove the exclusive lockThis function removes the exclusive lock which is created by LDREX.*/
__attribute__( ( always_inline ) ) __STATIC_INLINE void __CLREX(void)
{__ASM volatile ("clrex");
}/** \brief Signed SaturateThis function saturates a signed value.\param [in] value Value to be saturated\param [in] sat Bit position to saturate to (1..32)\return Saturated value*/
#define __SSAT(ARG1,ARG2) \
({ \uint32_t __RES, __ARG1 = (ARG1); \__ASM ("ssat %0, %1, %2" : "=r" (__RES) : "I" (ARG2), "r" (__ARG1) ); \__RES; \})/** \brief Unsigned SaturateThis function saturates an unsigned value.\param [in] value Value to be saturated\param [in] sat Bit position to saturate to (0..31)\return Saturated value*/
#define __USAT(ARG1,ARG2) \
({ \uint32_t __RES, __ARG1 = (ARG1); \__ASM ("usat %0, %1, %2" : "=r" (__RES) : "I" (ARG2), "r" (__ARG1) ); \__RES; \})/** \brief Count leading zerosThis function counts the number of leading zeros of a data value.\param [in] value Value to count the leading zeros\return number of leading zeros in value*/
__attribute__( ( always_inline ) ) __STATIC_INLINE uint8_t __CLZ(uint32_t value)
{uint8_t result;__ASM volatile ("clz %0, %1" : "=r" (result) : "r" (value) );return(result);
}#endif /* (__CORTEX_M >= 0x03) */#elif defined ( __TASKING__ ) /*------------------ TASKING Compiler --------------*/
/* TASKING carm specific functions *//** The CMSIS functions have been implemented as intrinsics in the compiler.* Please use "carm -?i" to get an up to date list of all intrinsics,* Including the CMSIS ones.*/#endif/*@}*/ /* end of group CMSIS_Core_InstructionInterface */#endif /* __CORE_CMINSTR_H */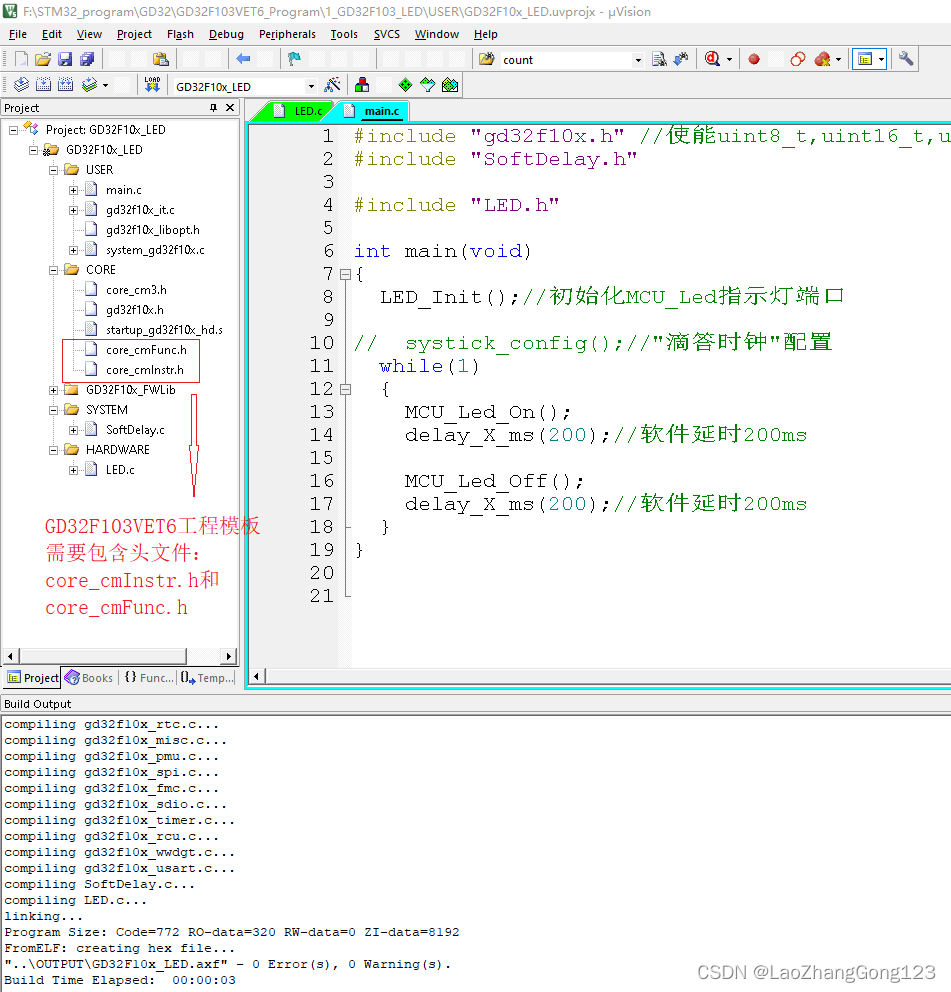
相关文章:
error: #5: cannot open source input file “core_cmInstr.h“
GD32F103VET6和STM32F103VET6引脚兼容。 GD32F103VET6工程模板需要包含头文件:core_cmInstr.h和core_cmFunc.h,这个和STM32F103还是有区别的,否则会报错,如下: error: #5: cannot open source input file "core…...

FastAPI 教程、结合vue实现前后端分离
英文版文档:https://fastapi.tiangolo.com/ 中文版文档:https://fastapi.tiangolo.com/zh/ 1、FastAPI 教程 简 介 FastAPI 和 Sanic 类似,都是 Python 中的异步 web 框架。相比 Sanic,FastAPI 更加的成熟、社区也更加的活跃。 …...
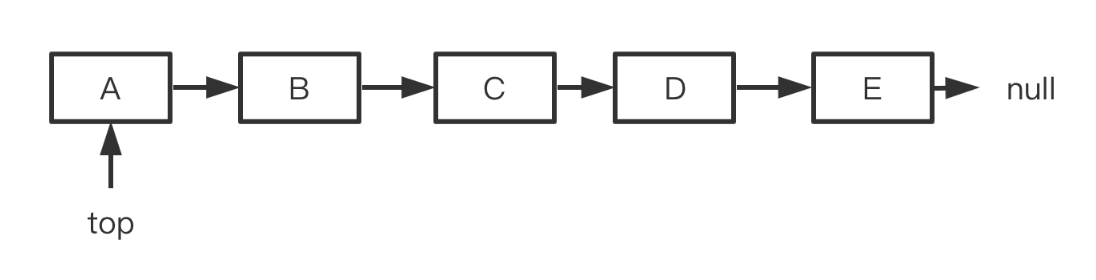
算法通关村第四关——如何基于数组(链表)实现栈
栈的基础知识 栈的特征 特征1 栈和队列是比较特殊的线性表,又被称为 访问受限的线性表。栈是很多表达式、符号等运算的基础,也是递归的底层实现(递归就是方法自己调用自己,在JVM的虚拟机栈中,一个线程中的栈帧就是…...

Postgresql警告日志的配置
文章目录 1.postgresql与日志有关的参数2.开启日志3.指定日志目录4.設置文件名format5.設置日志文件產出模式6.設置日志记录格式7.日誌輪換7.1非截斷式輪換7.2 截斷式輪換 8.日誌記錄內容8.1 log_statement8.2 log_min_duration_statement 9 輸出範本 1.postgresql与日志有关的…...

Java、JSAPI、 ssm架构 微信支付demo
1.前端 index.html <%page import"com.tenpay.configure.WxPayConfig"%> <% page language"java" contentType"text/html; charsetUTF-8" pageEncoding"UTF-8"%> <html><style>#fukuan{font-size: 50px;marg…...
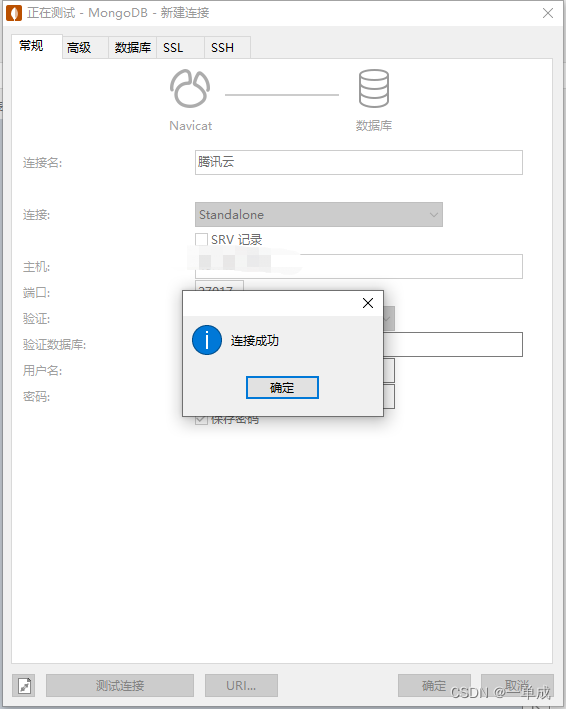
MongoDB文档--基本安装-linux安装(mongodb环境搭建)-docker安装(挂载数据卷)-以及详细版本对比
阿丹: 前面了解了mongodb的一些基本概念。本节文章对安装mongodb进行讲解以及汇总。 官网教程如下: 安装 MongoDB - MongoDB-CN-Manual 版本特性 下面是各个版本的选择请在安装以及选择版本的时候参考一下: MongoDB 2.x 版本:…...
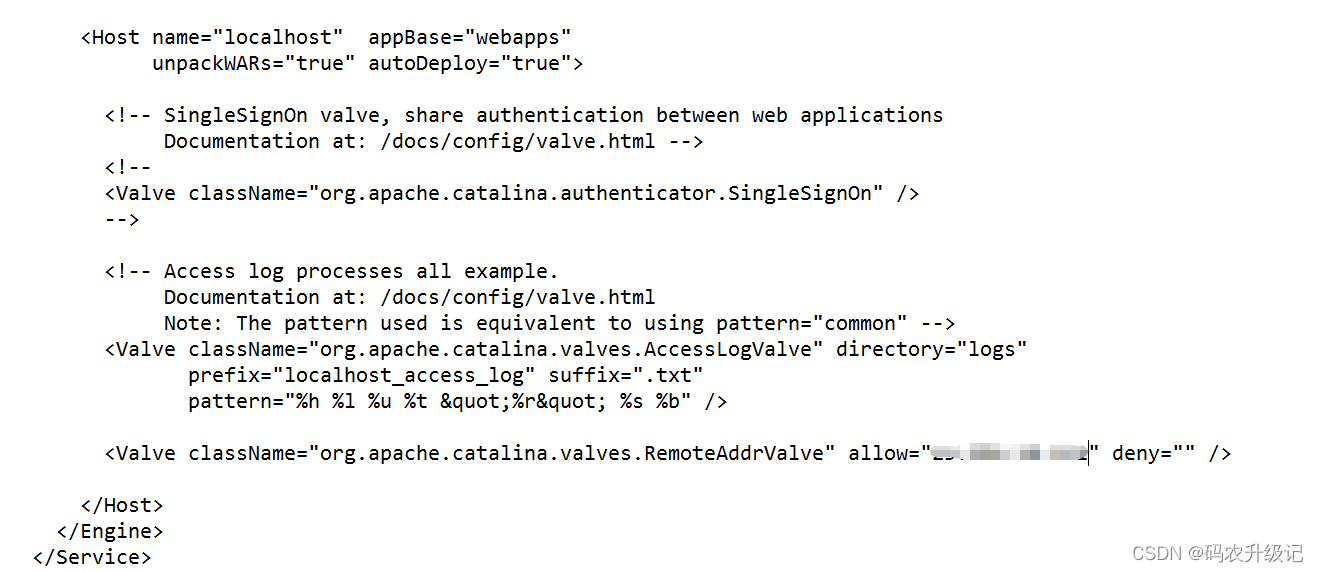
tomcat限制IP访问
tomcat可以通过增加配置,来对来源ip进行限制,即只允许某些ip访问或禁止某些来源ip访问。 配置路径:server.xml 文件下 标签下。与同级 <Valve className"org.apache.catalina.valves.RemoteAddrValve" allow"192.168.x.x&…...

互联网宠物医院系统开发:数字化时代下宠物医疗的革新之路
随着人们对宠物关爱意识的提高,宠物医疗服务的需求也日益增加。传统的宠物医院存在排队等待、预约难、信息不透明等问题,给宠物主人带来了诸多不便。而互联网宠物医院系统的开发,则可以带来许多便利和好处。下面将介绍互联网宠物医院系统开发…...

docker镜像批量导出导入
docker镜像批量导出导入 image_tar为存储镜像目录 删除所有容器 一、首先需要停止所有运行中的容器 docker stopdocker ps -a -q docker ps -a -q 意思是列出所有容器(包括未运行的),只显示容器编号,其中 -a : 显示所有的容器&…...
宇凡微2.4g遥控船开发方案,采用合封芯片
2.4GHz遥控船的开发方案是一个有趣且具有挑战性的项目。这样的遥控船可以通过无线2.4GHz频率进行远程控制,让用户在池塘或湖泊上畅游。以下是一个简要的2.4GHz遥控船开发方案: 基本构想如下 mcu驱动两个小电机,小电机上安装两个螺旋桨&#…...
RPC框架引入zookeeper服务注册与服务发现
Zookeeper概念及其作用 ZooKeeper是一个分布式的,开放源码的分布式应用程序协调服务,是Google的Chubby一个开源的实现,是大数据生态中的重要组件。它是集群的管理者,监视着集群中各个节点的状态根据节点提交的反馈进行下一步合理…...
MySQL用通配符过滤数据
简单的不使用通配符过滤数据的方式使用的值都是已知的,但是当搜索产品名中包含ashui的所有产品时,用简单的比较操作符肯定不行,必须使用通配符。利用通配符可以创建比较特定数据的搜索模式。 通配符:用来匹配值的一部分的特殊字符…...

低通、高通、带通、阻通滤波器
目录 低通、高通、带通、阻通滤波器 低通、高通、带通、带阻滤波器的区别 通俗理解: 1、低通滤波器 2、高通滤波器 3、带通滤波器 4、带阻滤波器 5、全通滤波器 低通、高通、带通、阻通滤波器 低通、高通、带通、带阻滤波器的区别 低通滤波器:只…...

IDEA SpringBoot Maven profiles 配置
IDEA SpringBoot Maven profiles 配置 IDEA版本: IntelliJ IDEA 2022.2.3 注意:切换环境之后务必点击一下刷新,推荐点击耗时更短。 application.yaml spring:profiles:active: env多环境文件名: application-dev.yaml、 applicat…...

微信小程序 背景图片如何占满整个屏幕
1. 在页面的wxss文件中,设置背景图片的样式: page{background-image: url(图片路径);background-size: 100% 100%;background-repeat: no-repeat; } 2. 在页面的json文件中,设置背景图片的样式: {"backgroundTextStyle&qu…...

邪恶版ChatGPT来了!
「邪恶版」ChatGPT 出现:每月 60 欧元,毫无道德限制,专为“网络罪犯”而生。 WormGPT 并不是一个人工智能聊天机器人,它的开发目的不是为了有趣地提供无脊椎动物的人工智能帮助,就像专注于猫科动物的CatGPT一样。相反&…...
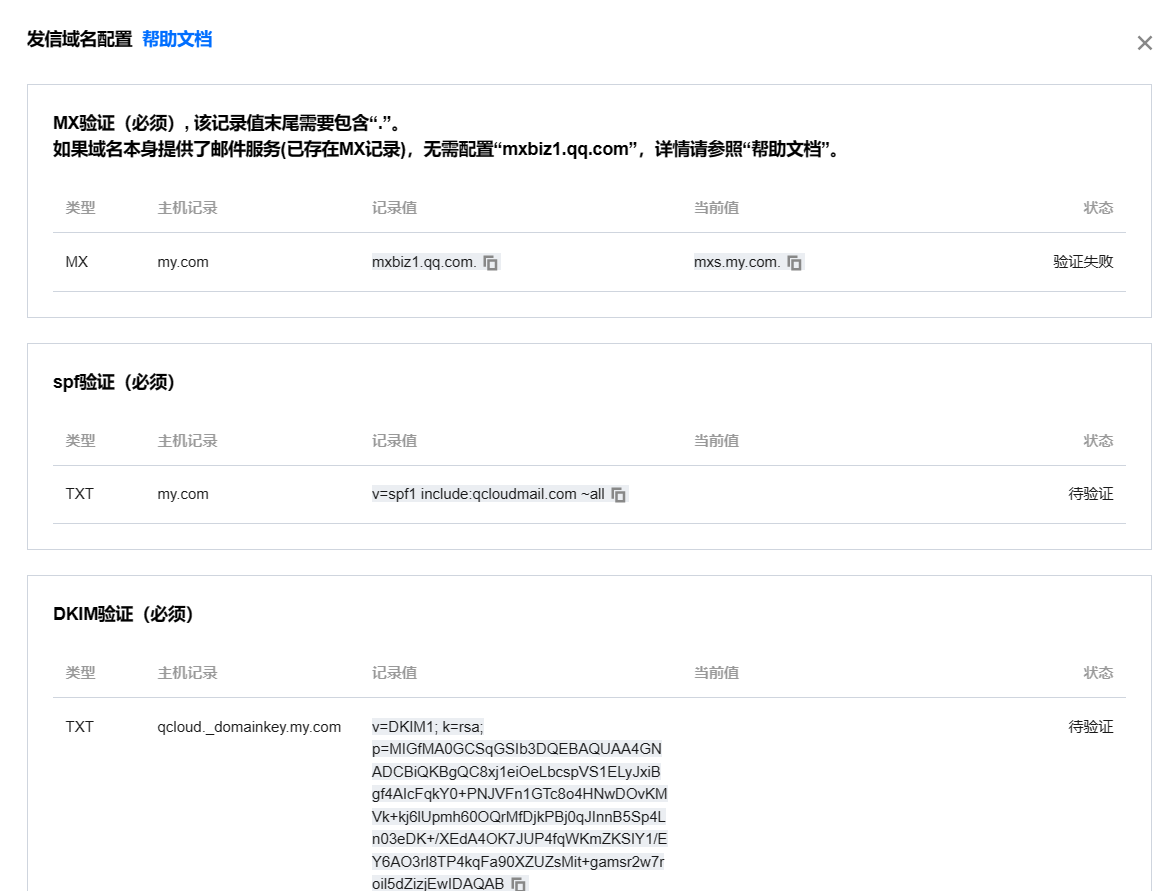
一、Postfix[安装与配置、smtp认证、Python发送邮件以及防垃圾邮件方法、使用腾讯云邮件服务]
Debian 11 一、安装 apt install postfix 二、配置 1.dns配置 解释:搭建真实的邮件服务器需要在DNS提供商那里配置下面的dns 配置A记录mail.www.com-1.x.x.x配置MX记录www.com-mail.www.com 解释:按照上面的配置通常邮件格式就是adminwww.com其通过…...
React哲学——官方示例
在本篇技术博客中,我们将介绍React官方示例:React哲学。我们将深入探讨这个示例中使用的组件化、状态管理和数据流等核心概念。让我们一起开始吧! 项目概览 React是一个流行的JavaScript库,用于构建用户界面。React的设计理念是…...
设计模式之开闭原则
什么是开闭原则? 开放封闭原则称为OCP原则(Open Closed Principle)是所有面向对象原则的核心。 “开闭原则”是面向对象编程中最基础和最重要的设计原则之一。 软件设计本身所追求的目标就是封装变化、降低耦合,而开放封闭原则正是对这一…...

Linux中的file命令:查看文件类型
2023年8月1日,周二上午 目录 简要说明使用方法MIME类型举例说明 简要说明 在Linux中,file命令用于识别文件类型。 file命令可以识别各种类型的文件,包括普通文件、目录、符号链接、设备文件、压缩文件、二进制可执行文件等。 它是一个非常…...

Unity-MCP协议:可嵌入、可协商的AI上下文通信标准
1. 这不是又一个“AI插件”,而是Unity开发工作流的底层重定义你有没有过这样的时刻:在Unity里反复调整Animator Controller的过渡条件,只为让角色转身动画不穿模;写完一段NavMesh寻路逻辑,却要花两小时调试Agent卡在斜…...

强化学习在并行机构人形机器人控制中的应用
1. 项目概述在机器人控制领域,强化学习(RL)正逐渐成为解决复杂动力学系统问题的有力工具。然而,当面对具有并行驱动机构的人形机器人时,传统RL训练方法往往面临一个关键挑战:大多数仿真环境无法准确模拟闭环运动链(Closed Kinemat…...

Python合并Excel文档
有若干个Excel文档,每个文档格式一致,及第一行为文件标题,第二行为表格表头(表头不完全一致)。现需要将他们合并。合并规则为:去掉每个文档的第一行,以第二行为表头,将每个文档的第三…...
 第五篇:声明时的键值设计技巧:结构与内表的主键、非主键配置指南)
SAP-ABAP:变量、常量、结构与内表声明(10篇博客合集) 第五篇:声明时的键值设计技巧:结构与内表的主键、非主键配置指南
变量、常量、结构与内表声明(10篇博客合集) 第五篇:声明时的键值设计技巧:结构与内表的主键、非主键配置指南如果把内表比作一张内存中的“数据库表”,那么键就是这张表的索引甚至主键。键的设计直接决定了数据的唯一性…...

可解释AI新突破:基于局部帕累托最优的模型解释框架
1. 项目概述:当AI模型成为“黑箱”,我们如何撬开它?在机器学习项目里摸爬滚打十几年,我见过太多这样的场景:团队花大力气训练出一个准确率高达95%的复杂模型(比如深度神经网络),业务…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

Office RibbonX Editor:简单三步打造你的专属Office界面
Office RibbonX Editor:简单三步打造你的专属Office界面 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-edit…...

收藏干货|2026 版企业 AI 落地实操指南,程序员小白入门避坑必备
如今人工智能早已脱离概念炒作阶段,全面扎根企业实际业务场景,成为技术从业者与企业管理者无法回避的发展课题。各行各业都加速布局AI赛道,行业心态也从初期观望试探,彻底转变为实打实的落地攻坚。 不少企业高层主动牵头统筹AI规划…...

基于MAX78000与CNN的智能螺栓巡检小车:嵌入式AI实战解析
1. 项目概述与核心思路在轨道交通的日常运维中,螺栓的紧固状态检查是一项繁重且关键的任务。无论是轨道上的紧固螺栓,还是列车转向架、轮对轴承上的关键螺栓,其松动或失效都可能引发严重的安全事故。传统的人工巡检方式不仅效率低下ÿ…...

AI专著生成必备工具,轻松撰写20万字专著,质量与效率双保障!
学术专著的写作是一个严谨的过程,其背后需要大量的资料和数据作为基础。搜集和整理这些资料与数据往往是写作过程中最繁琐且耗时的部分。研究人员需要广泛收集国内外的前沿文献,确保所用文献不仅具备权威性,还要与研究主题密切相关。同时&…...