【BEV感知】3-BEV开源数据集
3-BEV开源数据集
- 1 KITTI
- 1.1 KITTI数据怎么采集?
- 1.2 KITTI数据规模有多大?
- 1.3 KITTI标注了哪些目标?
- 1.4 转换矩阵
- 1.5 标签文件
- 2 nuScenes
- 2.1 nuScenes Vs KITTI
- 2.2 标注文件
1 KITTI
KITTI
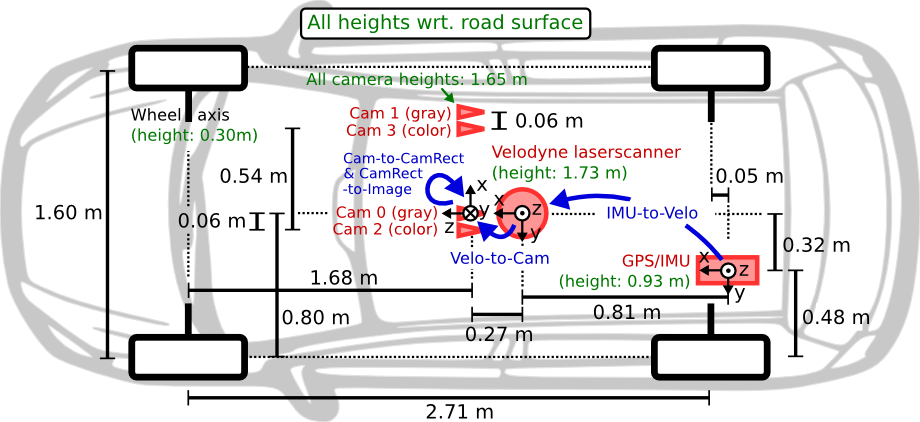
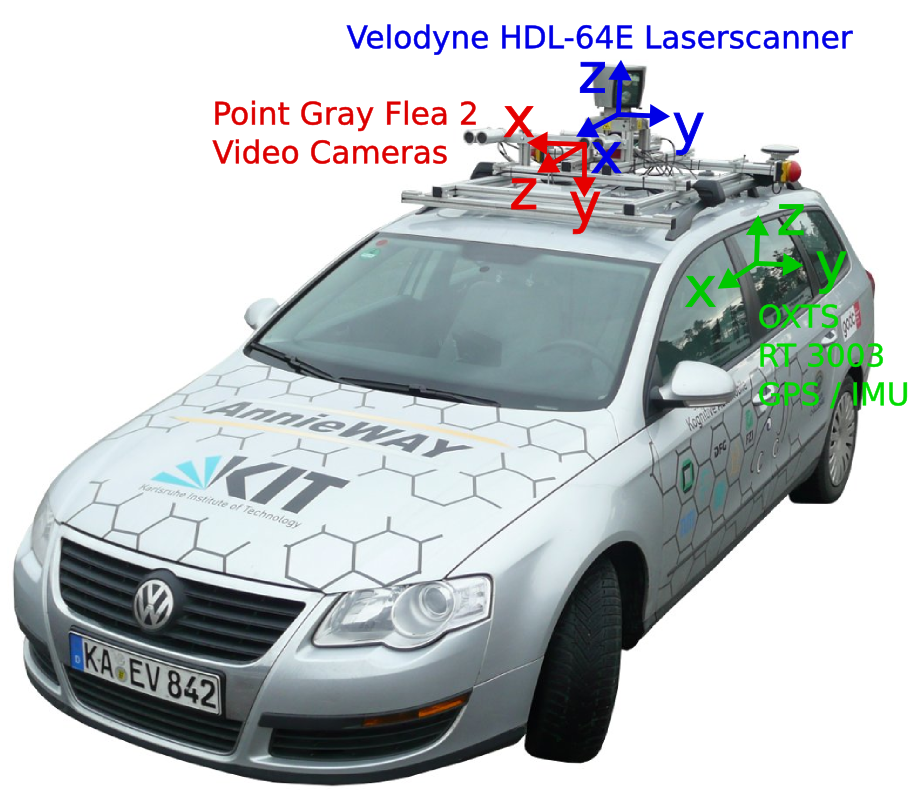
1.1 KITTI数据怎么采集?
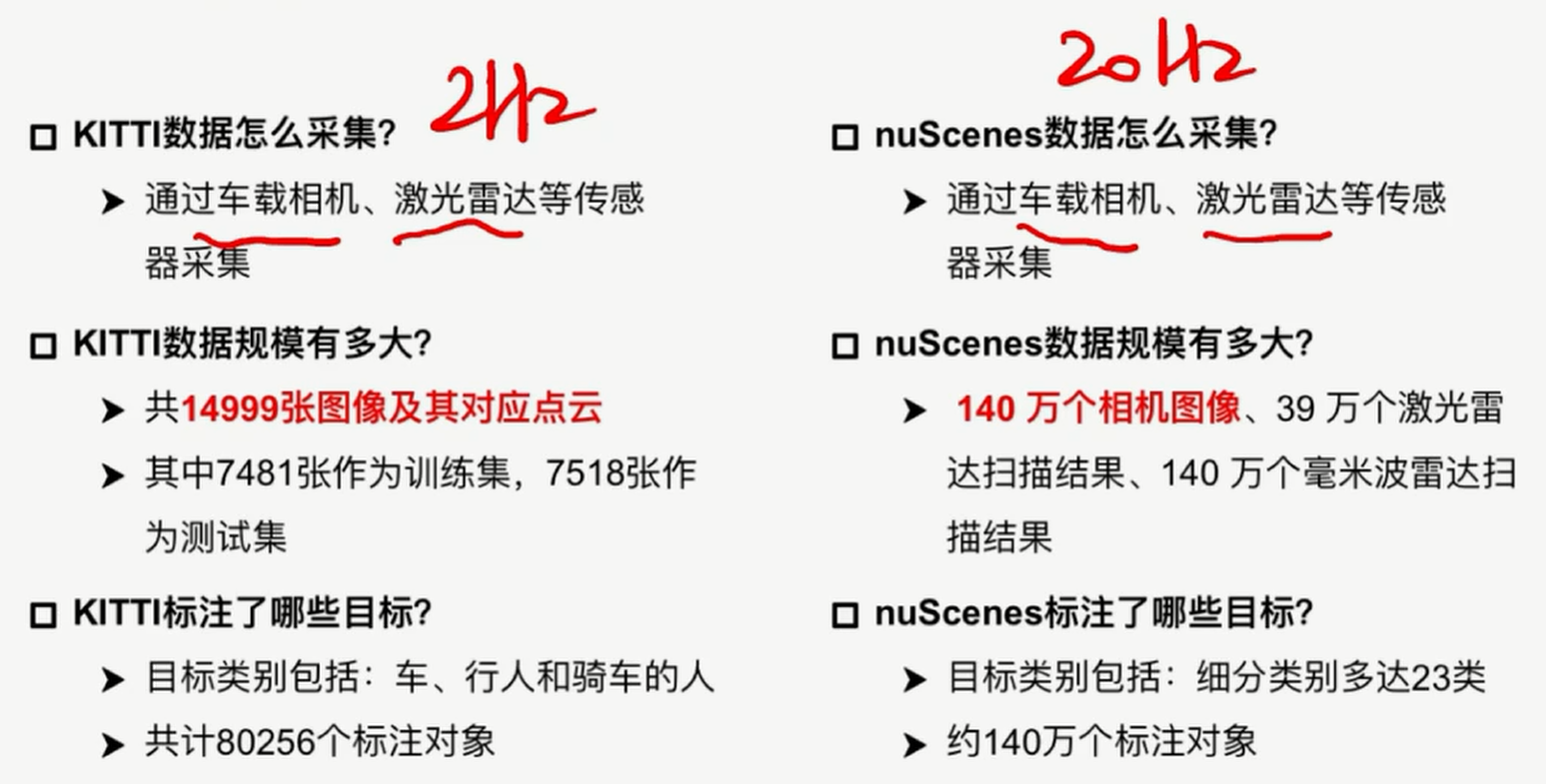
通过车载相机、激光雷达等传感器采集。
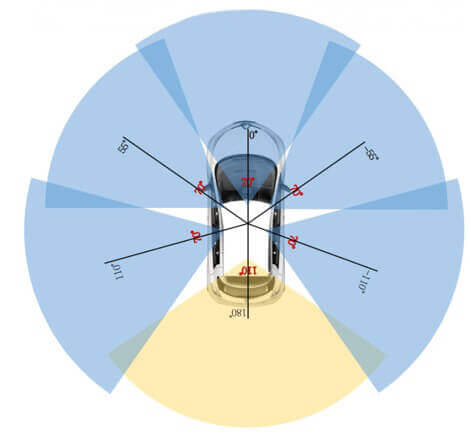
只提供了相机正视图90度范围内的标注数据。

1.2 KITTI数据规模有多大?
共14999张图像及其对应点云。其中7481张作为训练集,7518张作为测试集
1.3 KITTI标注了哪些目标?
目标类别包括:车、行人和骑车的人共计80256个标注对象
1.4 转换矩阵
y = P r e c t ( i ) R r e c t ( 0 ) T v e l o c a m x y=P_{rect}^{(i)}R_{rect}^{(0)}T_{velo}^{cam}x y=Prect(i)Rrect(0)Tvelocamx
x x x:表示点云坐标x,y,z。 y y y:表示像素坐标, T v e l o c a m T_{velo}^{cam} Tvelocam :表示从LiDar坐标系转换到相机坐标系。 R r e c t ( 0 ) R_{rect}^{(0)} Rrect(0) :表示相机畸变矫正参数。 P r e c t ( i ) P_{rect}^{(i)} Prect(i) :表示相机内参,将图像从相机坐标系转换到像素坐标系。
该转换矩阵可以实现点云坐标和像素坐标之间的双向转换。
1.5 标签文件
每个txt文件代表一个场景,场景用六位数字编号。
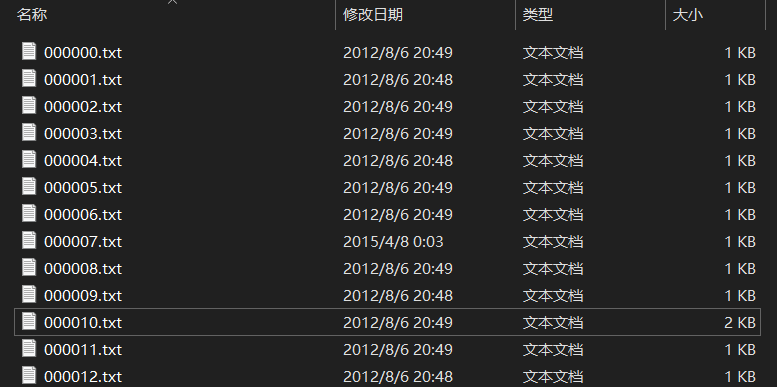
文件内容如下,每一行标识一个物体。
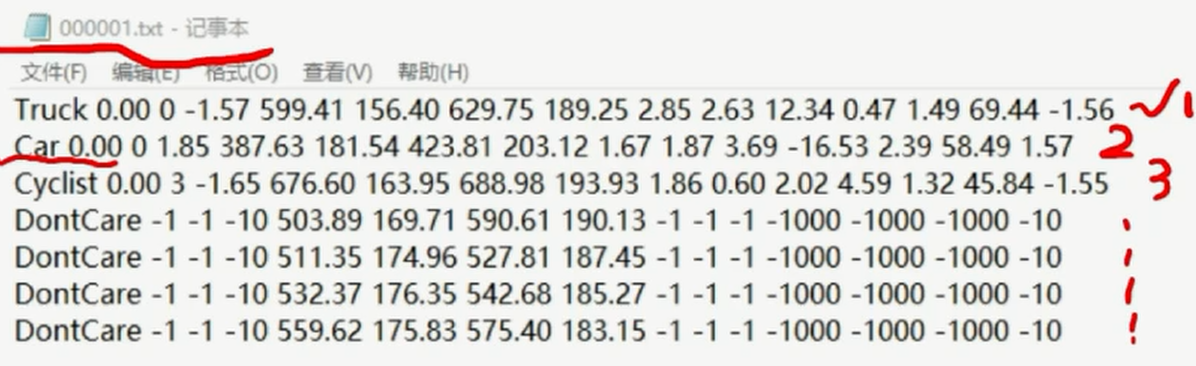

以000000.txt文件及其对应的图像为例。
Pedestrian 0.00 0 -0.20 712.40 143.00 810.73 307.92 1.89 0.48 1.20 1.84 1.47 8.41 0.01
| 参数名 | 参数值 | 参数值类型 | 参数值范围 | 备注 |
|---|---|---|---|---|
| 目标类别 | Pedestrian | |||
| 截断程度 | 0.00 | 连续值 | [0.0,1.0] | 截断是指目标只有一部分出现在图片中 |
| 遮挡程度 | 0 | 整数,离散值 | {0,1,2,3} | 0无遮挡,1部分遮挡,2严重遮挡,3无法辨识是否遮挡 |
| 观测角度 | -0.20 | 弧度值 | [-π,π] | 当前标注物体与相机之间夹角 |
| 2d label | 712.40 143.00 810.73 307.92 | 坐标值 | 2d目标框的坐标位置,前两个值表示左上角点坐标,后两个值表示右下角点坐标 | |
| 3d label | 1.89 0.48 1.20 1.84 1.47 8.41 | 坐标值 | 单位:米 | 前三个值表示高h宽w长l,后三个值表示中心点位置坐标,与观测角度组成7个3d目标检测量 |
| 置信度 | 0.01 | 概率值 | 表示当前目标以该位置以类别存在的概率有多大,通常在测试时网络预测后使用的值 |

2 nuScenes
nuScenes
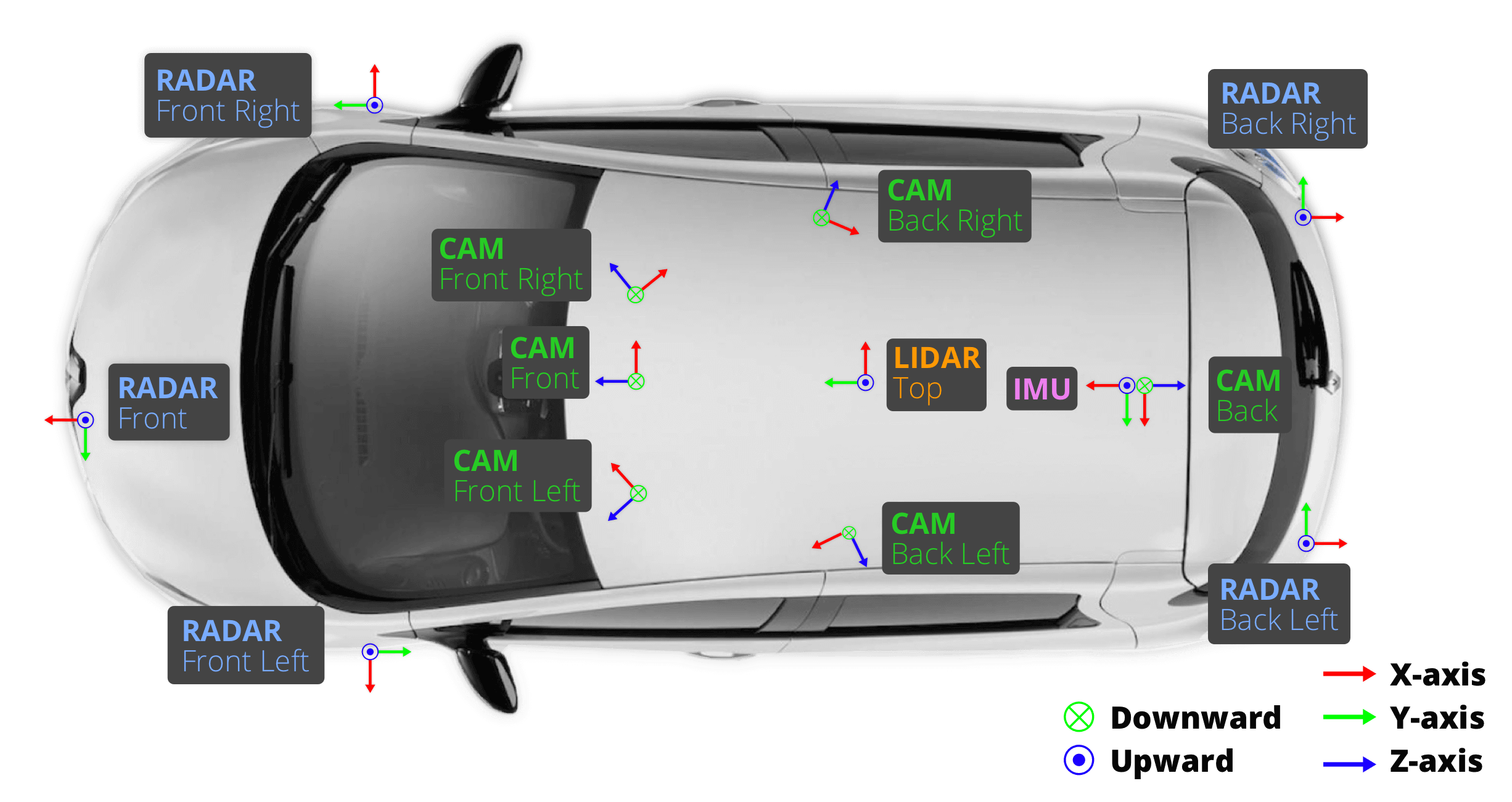
6个相机,车顶LiDAR,5个毫米波雷达。可提供 图像数据、点云数据、目标标注(转换矩阵)。
2.1 nuScenes Vs KITTI
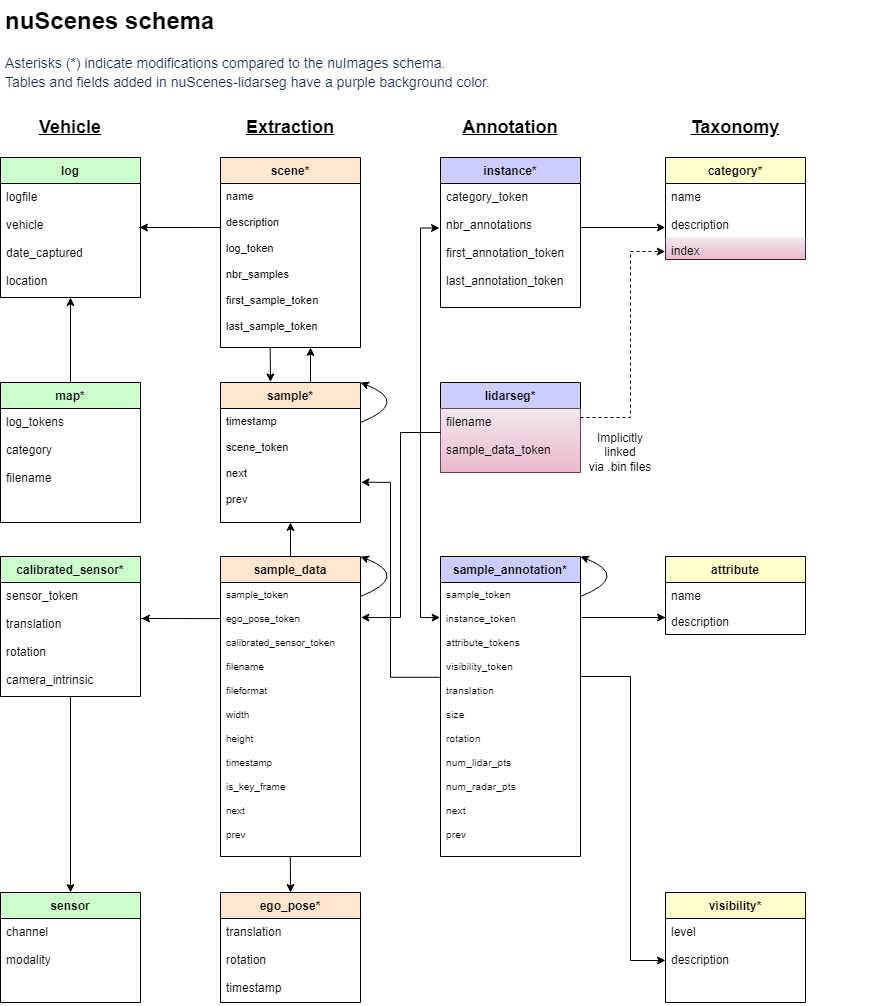
2.2 标注文件
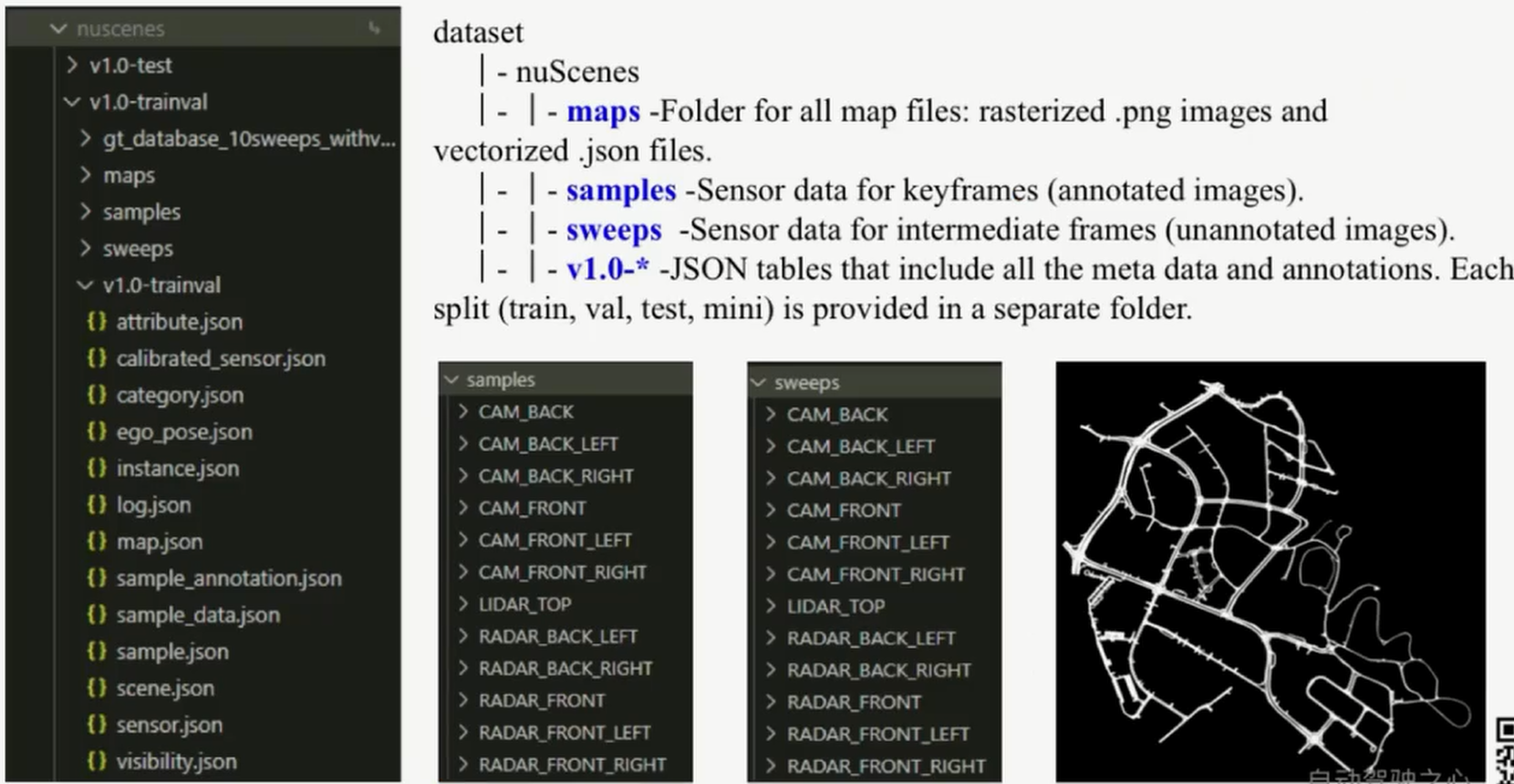
| -nuSecenes
| - | - maps:后继规划任务使用,目标检测中用不到。
| - | - samples:抽取的关键帧,已标注。
| - | - sweeps:未被抽取为关键帧的其余帧,未标注。
| - | - v1.0-*:json标注文件,*表示train,val,test,mini不同文件夹。
| - | - | - attribute.json:描绘了一个实例的属性。
| - | - | - calibrated_sensorjson:车辆上已经校准的特定传感器(激光雷达/雷达/摄像机)的标定数据,其实就是转换矩阵。
| - | - | - category.json:对象类别的分类。
| - | - | - ego_pose.json:车辆在特定时刻的一个姿态。
| - | - | - instancejson:一个物体的实例。
| - | - | - log.json:提取数据的日志的信息。
| - | - | - map.json:用二值分割掩膜所保存的地图数据口,规划中常用目标检测中不常用。
| - | - | - sample.json:样例。指出哪些帧是关键帧。
| - | - | - sample_annotation.json:3d bounding box,关键帧中的目标信息。
| - | - | - sample_data.json:所有的传感器数据。除关键帧外的其他帧。
| - | - | - scene.json:场景数据
| - | - | - sensor.json:传感器的种类
| - | - | - visibility.json:实例的可见性
相关文章:
【BEV感知】3-BEV开源数据集
3-BEV开源数据集 1 KITTI1.1 KITTI数据怎么采集?1.2 KITTI数据规模有多大?1.3 KITTI标注了哪些目标?1.4 转换矩阵1.5 标签文件 2 nuScenes2.1 nuScenes Vs KITTI2.2 标注文件 1 KITTI KITTI 1.1 KITTI数据怎么采集? 通过车载相机、激光雷达等传感器采集。 只提供了相机正…...
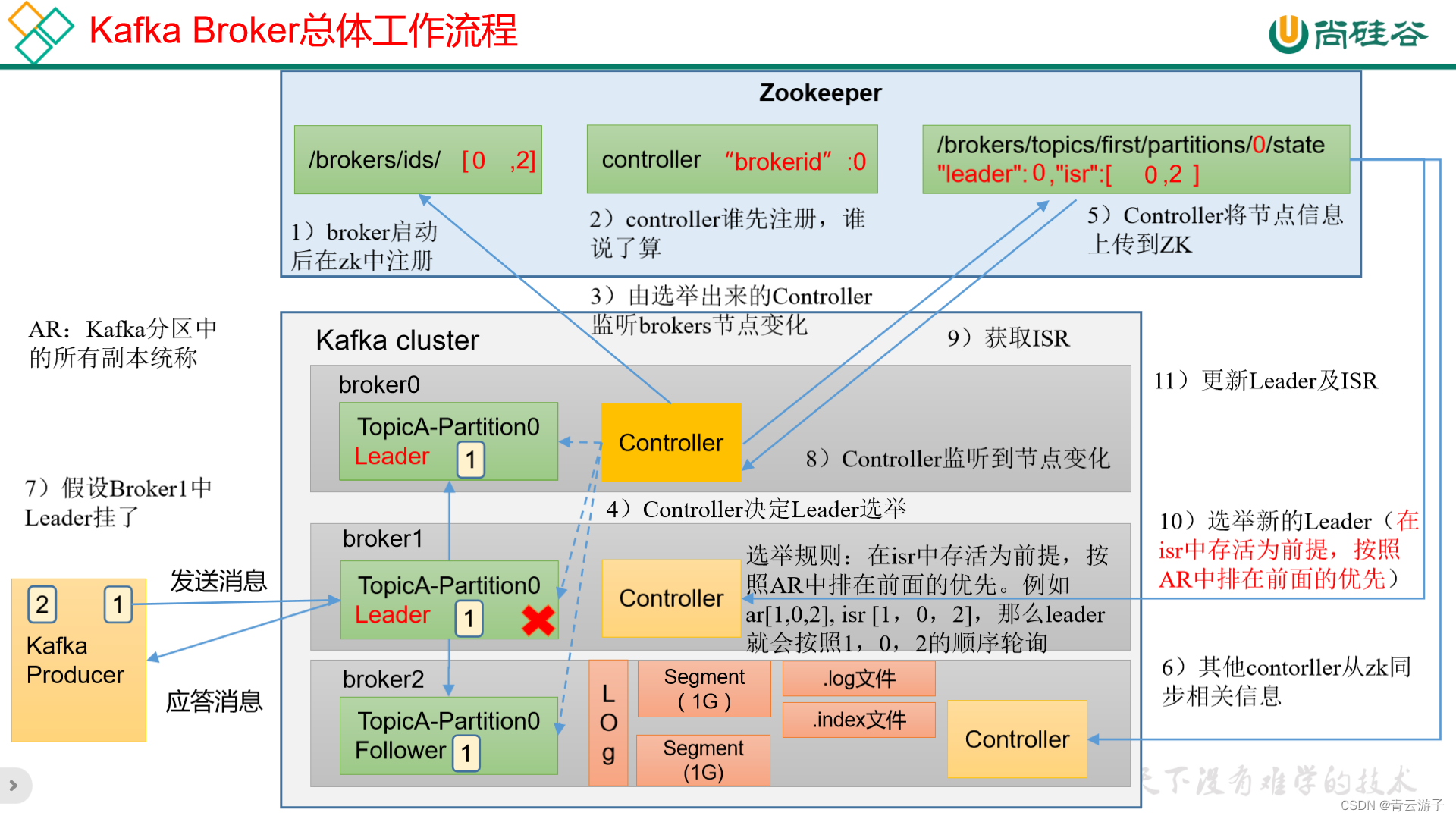
Kafka-Broker工作流程
kafka集群在启动时,会将每个broker节点注册到zookeeper中,每个broker节点都有一个controller,哪个controller先在zookeeper中注册,哪个controller就负责监听brokers节点变化,当有分区的leader挂掉时,contro…...

第八篇-Tesla P40+ChatGLM2+LoRA
部署环境 系统:CentOS-7CPU: 14C28T显卡:Tesla P40 24G驱动: 515CUDA: 11.7cuDNN: 8.9.2.26目的 验证P40部署可行性,只做验证学习lora方式微调创建环境 conda create --name glm-tuning python3.10 conda activate glm-tuning克隆项目 git clone http…...

调用feign返回错误的数据
bug描述: 在一个请求方法中会调用到feign去获取其他的数据。 List<Demo> list aaaFeignApi.getData(personSelectGetParam);在调用的时候,打断点到feign的地方,数据是存在的,并且有15条。但是返回到上面代码的时候数据就…...
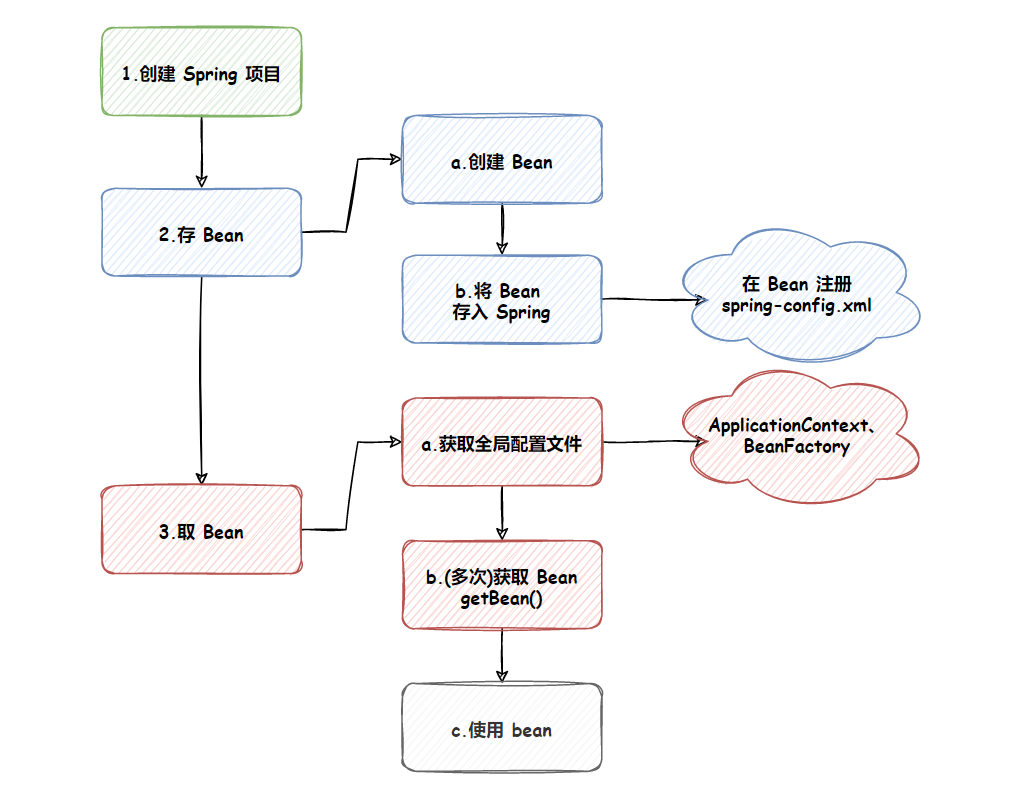
【Spring】(二)从零开始的 Spring 项目搭建与使用
文章目录 前言一、Spring 项目的创建1.1 创建 Maven 项目1.2 添加 Spring 框架支持1.3 添加启动类 二、储存 Bean 对象2.1 创建 Bean2.1 将 Bean 注册到 Spring 容器 三、获取并使用 Bean 对象3.1 获取Spring 上下文3.2 ApplicationContext 和 BeanFactory 的区别3.3 获取指定的…...

redis五种数据类型介绍
、string(字符串) 它师最基本的类型,可以理解为Memcached一模一样的类型,一个key对应一个value。 注意:一个键最大能存储 512MB。 特性:可以包含任何数据,比如jpg图片或者序列化的对象,一个键最大能存储512…...
【JavaEE】Spring Boot - 项目的创建和使用
【JavaEE】Spring Boot 开发要点总结(1) 文章目录 【JavaEE】Spring Boot 开发要点总结(1)1. Spring Boot 的优点2. Spring Boot 项目创建2.1 下载安装插件2.2 创建项目过程2.3 加载项目2.4 启动项目2.5 删除一些没用的文件 3. Sp…...

Git reset、revert用法
reset reset是删除之前的提交记录,所有的提交点都会被清除,我们看下执行前后的git log区别 D:\workspace\android>git log commit 87c1277a57544c53c603b04110e3dde100da8f57 (HEAD -> develop_main) Author: test <test.com> Date: Wed…...

Redis-1
Redis 理论部分 redis 速度快的原因 1、纯内存操作 2、单线程操作,避免了频繁的上下文切换和资源争用问题,多线程需要占用更多的 CPU 资源 3、采用了非阻塞 I/O 多路复用机制 4、提供了非常高效的数据结构,例如双向链表、压缩页表和跳跃…...

【Linux】Linux服务器连接百度网盘:实现上传下载
【Linux】Linux服务器连接百度网盘:实现上传下载 文章目录 【Linux】Linux服务器连接百度网盘:实现上传下载1. 前言2. 具体过程2.1 pip 安装所需包2.2 认证(第一次连接需要认证)2.3 下载所需文件或者目录2.4 其他指令使用2.5 注意…...
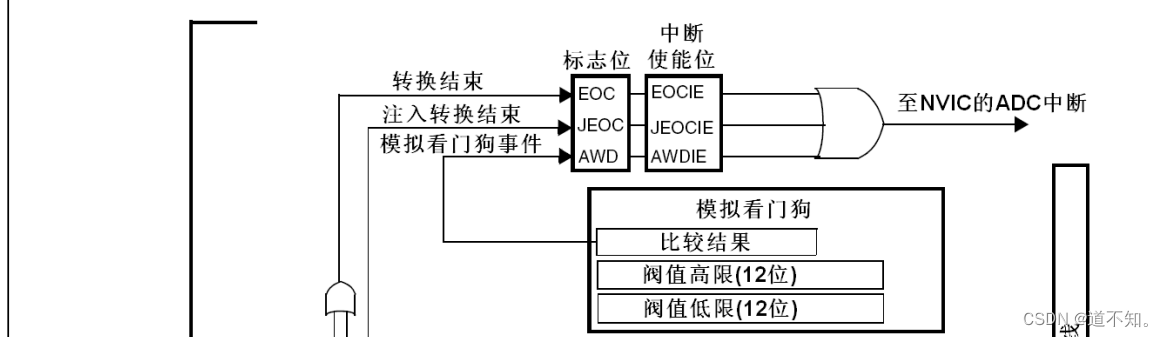
ADC模拟看门狗
如果被ADC转换的模拟电压低于低阀值或高于高阀值,AWD模拟看门狗状态位被设置。阀值位 于ADC_HTR和ADC_LTR寄存器的最低12个有效位中。通过设置ADC_CR1寄存器的AWDIE位 以允许产生相应中断。通过以下函数可以进行配置 void ADC_AnalogWatchdogCmd(ADC_TypeDef* ADCx…...

google谷歌gmail邮箱账号注册手机号无法进行验证怎么办?此电话号码无法用于进行验证 或 此电话号码验证次数太多
谷歌gmail邮箱账号注册手机号无法进行验证怎么办? 使用手机号码注册谷歌gmail邮箱账号时会遇到:此电话号码无法用于进行验证 或 此电话号码验证次数太多。造成注册google谷歌gmail邮箱账号受阻,无法正常完成注册。 谷歌Gmail邮箱账号正确的注册方法与教…...

Spring:IOC技术、Bean、DI
前言 Spring是一个开源的项目,并不是单单的一个技术,发展至今已形成一种开发生态圈。也就是说我们可以完全使用Spring技术完成整个项目的构建、设计与开发。Spring是一个基于IOC和AOP的架构多层j2ee系统的架构。 SpringFramework:Spring框架…...

目标检测与跟踪 (2)- YOLO V8配置与测试
系列文章目录 第一章 目标检测与跟踪 (1)- 机器人视觉与YOLO V8 目标检测与跟踪 (1)- 机器人视觉与YOLO V8_Techblog of HaoWANG的博客-CSDN博客3D物体实时检测、三维目标识别、6D位姿估计一直是机器人视觉领域的核心研究课题&a…...

【Leetcode】56.合并区间
一、题目 1、题目描述 以数组 intervals 表示若干个区间的集合,其中单个区间为 intervals[i] = [ s t a r t i start_i start...
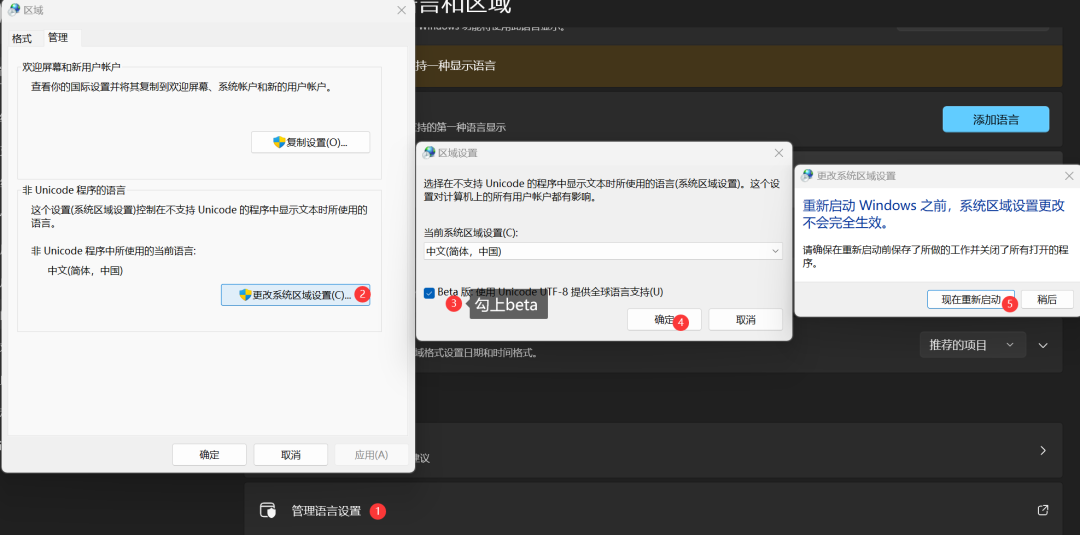
设置系统编码 Beta
在yolov5环境搭建过程中会遇到如下的编码错误警告: 这时,按住“ctrlc”中止进程,然后设置系统编码: 电脑右键属性打开: 重启之后等安装好了,记得回去把bae键取消。...

phpunit
composer地址:phpunit/phpunit - Packagist 官方文档:PHPUnit文档 – PHP测试框架 PHPUnit是一个框架,最为hyperf学习的补充学习,就不写这么细了。 估计写下安装和使用,具体学习内容看文档。 一、安装 需安装扩展:…...
html学习9(脚本)
1、<script>标签用于定义客户端脚本,比如JavaScript,既可包含脚本语句,也可通过src属性指向外部文件。 2、JavaScript最常用于图片操作、表单验证及内容动图更新。 3、<noscript>标签用于在浏览器禁用脚本或浏览器不支持脚本&a…...
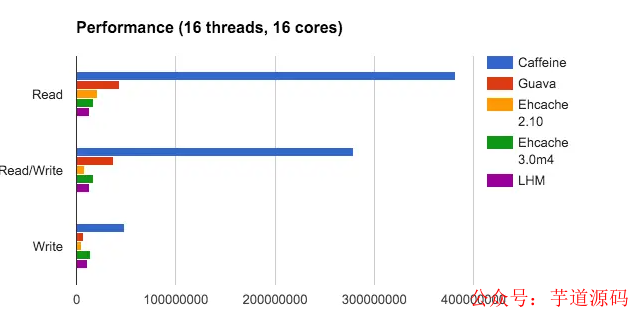
SpringBoot整合Caffeine
一、Caffeine介绍 1、缓存介绍 缓存(Cache)在代码世界中无处不在。从底层的CPU多级缓存,到客户端的页面缓存,处处都存在着缓存的身影。缓存从本质上来说,是一种空间换时间的手段,通过对数据进行一定的空间安排,使得下…...

元宇宙虚拟展厅的特点是什么呢?优势有哪些?
元宇宙是一个很广阔的虚拟世界,它可以创造出更为丰富、沉浸式的体验,这种全新的体验为展览和艺术领域带来了更多的可能性,元宇宙虚拟展厅以其多样化、互动性、沉浸式展示的特点,带领大家进入一个虚拟现实的全新世界。 元宇宙虚拟展…...

魔兽争霸III现代兼容性终极指南:用Warcraft Helper重获完美体验
魔兽争霸III现代兼容性终极指南:用Warcraft Helper重获完美体验 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸III在现代电…...

4步实现专业黑苹果配置:OpCore-Simplify零代码自动化解决方案
4步实现专业黑苹果配置:OpCore-Simplify零代码自动化解决方案 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify OpCore-Simplify是一款革命性…...

旧设备升级指南:用OpenCore Legacy Patcher让Mac重获新生的5个实用步骤
旧设备升级指南:用OpenCore Legacy Patcher让Mac重获新生的5个实用步骤 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 随着苹果系统的不断更新&a…...

WechatBakTool终极指南:如何安全备份与恢复微信聊天记录
WechatBakTool终极指南:如何安全备份与恢复微信聊天记录 【免费下载链接】WechatBakTool 基于C#的微信PC版聊天记录备份工具,提供图形界面,解密微信数据库并导出聊天记录。 项目地址: https://gitcode.com/gh_mirrors/we/WechatBakTool …...

避坑指南:Vue2中xlsx-style设置行高无效?手把手教你修改源码并封装通用导出函数
Vue2中xlsx-style行高设置失效的深度解决方案与工程化封装 在Vue2项目中处理Excel导出时,很多开发者会遇到一个令人困惑的问题:明明按照xlsx-style的文档设置了row.hpx属性,导出的Excel文件却依然保持默认行高。这背后其实隐藏着xlsx.js源码中…...

C++的std--chrono时间库与steady_clock在性能测量中的正确使用
在C高性能程序开发中,精确测量代码执行时间是优化和调试的关键环节。std::chrono时间库作为现代C的标准工具,提供了高精度、类型安全的计时能力,其中steady_clock因其单调递增的特性成为性能测量的首选。本文将深入解析其正确使用方式&#x…...

Keil5开发环境为STM32移植水墨江南模型生成的精简字库
Keil5开发环境为STM32移植水墨江南模型生成的精简字库 最近在做一个有点意思的硬件项目,想在一块小小的OLED屏幕上,显示一些有中国风韵味的汉字,比如“风”、“雅”、“颂”这类字。直接用系统自带的宋体、黑体,总觉得差点意思&a…...

GLM-4.1V-9B-Base零基础入门:5分钟学会上传图片智能问答
GLM-4.1V-9B-Base零基础入门:5分钟学会上传图片智能问答 1. 认识GLM-4.1V-9B-Base GLM-4.1V-9B-Base是智谱开源的一款视觉多模态理解模型,专门用于处理图像内容识别、场景描述和目标问答等任务。与普通聊天模型不同,它专注于视觉理解能力&a…...

Socket.IO-Client-Swift终极安全指南:TLS/SSL配置和证书认证详解
Socket.IO-Client-Swift终极安全指南:TLS/SSL配置和证书认证详解 【免费下载链接】socket.io-client-swift 项目地址: https://gitcode.com/gh_mirrors/so/socket.io-client-swift Socket.IO-Client-Swift是一款功能强大的Swift客户端库,用于与S…...

OpenClaw+Qwen2.5-VL-7B:个人社交媒体自动化图文创作
OpenClawQwen2.5-VL-7B:个人社交媒体自动化图文创作 1. 为什么选择OpenClaw做社交媒体自动化 去年我开始运营一个科技类自媒体账号,最初每天花3小时手动找素材、写文案、配图。直到发现OpenClaw这个开源框架,我的工作流彻底改变了——现在9…...