micro-ros IMU ML 代码
示例代码:
#include <micro_ros_arduino.h>#include "LSM6DSOXSensor.h"
#include "lsm6dsox_activity_recognition_for_mobile.h"#include <stdio.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <micro_ros_utilities/type_utilities.h>
#include <micro_ros_utilities/string_utilities.h>#include <std_msgs/msg/int32.h>
#include <std_msgs/msg/string.h>#if !defined(ARDUINO_NANO_RP2040_CONNECT)
#error This example is only avaible for Arduino Nano RP2040 Connect
#endifrcl_publisher_t string_publisher;
rcl_publisher_t pedometer_publisher;
std_msgs__msg__String string_msg;
std_msgs__msg__Int32 pedometer_msg;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;#define LED_PIN 13#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}}//Interrupts.
volatile int mems_event = 0;// Components
LSM6DSOXSensor AccGyr(&Wire, LSM6DSOX_I2C_ADD_L);// MLC
ucf_line_t *ProgramPointer;
int32_t LineCounter;
int32_t TotalNumberOfLine;void error_loop(){while(1){digitalWrite(LED_PIN, !digitalRead(LED_PIN));delay(100);}
}void setup() {set_microros_wifi_transports("WIFI SSID", "WIFI PASS", "192.168.1.57", 8888);pinMode(LED_PIN, OUTPUT);digitalWrite(LED_PIN, HIGH);delay(100);allocator = rcl_get_default_allocator();// create init_optionsRCCHECK(rclc_support_init(&support, 0, NULL, &allocator));// create nodeRCCHECK(rclc_node_init_default(&node, "IMU_node", "", &support));// create publisherRCCHECK(rclc_publisher_init_default(&string_publisher,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, String),"detection"));// create publisherRCCHECK(rclc_publisher_init_default(&pedometer_publisher,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),"pedometer"));micro_ros_utilities_create_message_memory(ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, String),&string_msg,(micro_ros_utilities_memory_conf_t) {});// Init IMU coreWire.begin();AccGyr.begin();AccGyr.Enable_X();AccGyr.Enable_G();ProgramPointer = (ucf_line_t *)lsm6dsox_activity_recognition_for_mobile;TotalNumberOfLine = sizeof(lsm6dsox_activity_recognition_for_mobile) / sizeof(ucf_line_t);for (LineCounter=0; LineCounter<TotalNumberOfLine; LineCounter++) {AccGyr.Write_Reg(ProgramPointer[LineCounter].address, ProgramPointer[LineCounter].data);}AccGyr.Enable_Pedometer();//Interrupts.pinMode(INT_IMU, INPUT);attachInterrupt(INT_IMU, INT1Event_cb, RISING);
}void INT1Event_cb() {mems_event = 1;
}void loop() {if (mems_event) {mems_event=0;LSM6DSOX_MLC_Status_t status;AccGyr.Get_MLC_Status(&status);LSM6DSOX_Event_Status_t event_status;AccGyr.Get_X_Event_Status(&event_status);if (status.is_mlc1) {uint8_t mlc_out[8];AccGyr.Get_MLC_Output(mlc_out);switch(mlc_out[0]) {case 0:string_msg.data = micro_ros_string_utilities_set(string_msg.data, "Stationary");break;case 1:string_msg.data = micro_ros_string_utilities_set(string_msg.data, "Walking");break;case 4:string_msg.data = micro_ros_string_utilities_set(string_msg.data, "Jogging");break;case 8:string_msg.data = micro_ros_string_utilities_set(string_msg.data, "Biking");break;case 12:string_msg.data = micro_ros_string_utilities_set(string_msg.data, "Driving");break;default:string_msg.data = micro_ros_string_utilities_set(string_msg.data, "Unknown");break;}RCSOFTCHECK(rcl_publish(&string_publisher, &string_msg, NULL));}if (event_status.StepStatus){uint16_t step_count = 0;AccGyr.Get_Step_Count(&step_count);pedometer_msg.data = step_count;RCSOFTCHECK(rcl_publish(&pedometer_publisher, &pedometer_msg, NULL));}}
}
智能解析
文档中的代码是用于在Arduino 上使用Micro ROS进行步数检测和活动识别的示例。
代码中包含以下重要部分:
- 包含所需的头文件:代码中包含了所需的头文件,包括Micro ROS和传感器库的头文件,以及标准输入输出库等。
- 定义了ROS节点句柄和发布器:代码中定义了ROS节点句柄(node handle)和两个发布器(publisher),一个用于发布字符串消息,另一个用于发布整型消息。
- 初始化传感器和ROS节点:在
setup()函数中,代码初始化了LSM6DSOX传感器并配置其寄存器,同时也初始化了ROS节点和发布器。 - 在
loop()函数中进行数据读取和发布:在每次循环中,代码从传感器读取数据,并根据传感器数据判断人的运动状态,将运动状态以字符串形式保存在string_msg中。同时,代码通过调用AccGyr.Get_Step_Count()函数获取步数,将步数保存在pedometer_msg.data中。然后,代码通过调用rcl_publish()函数发布这两个消息。
其中,RCCHECK()和RCSOFTCHECK()是两个用于检查函数返回值的宏定义。RCCHECK()会在函数返回不正确时调用error_loop()函数,而RCSOFTCHECK()仅会在函数返回不正确时进行断言。
此外,代码中还使用了中断来处理传感器的中断事件。当传感器产生中断时,会将mems_event变量置为1,在循环中可以通过检查此变量来得知是否有中断事件发生。
代码的最核心部分是用于检测传感器数据并发布到ROS的代码。这包括初始化传感器和ROS节点,读取传感器数据,以及通过调用rcl_publish函数发布消息。
其中,初始化部分包括设置LED引脚为输出模式,创建ROS节点句柄和发布器,并初始化了LSM6DSOX传感器。
在每次循环中,代码从传感器读取数据,并根据传感器数据判断人的运动状态,将运动状态以字符串形式保存在string_msg中。同时,代码通过调用AccGyr.Get_Step_Count()函数获取步数,将步数保存在pedometer_msg.data中。然后,代码通过调用rcl_publish()函数发布这两个消息。
此外,代码还使用了中断来处理传感器的中断事件。当传感器产生中断时,会将mems_event变量置为1,在循环中可以通过检查此变量来得知是否有中断事件发生。
// 引入所需的头文件 #include <micro_ros_arduino.h> // 引入Micro ROS的Arduino库 #include "LSM6DSOXSensor.h" // 引入LSM6DSOX传感器库 #include "lsm6dsox_activity_recognition_for_mobile.h" // 引入用于移动设备上的LSM6DSOX传感器活动识别库 #include <stdio.h> // 引入标准输入输出库 #include <rcl/rcl.h> // 引入ROS C库 #include <rcl/error_handling.h> // 引入ROS C的错误处理库 #include <rclc/rclc.h> // 引入ROS C的轻量级节点库 #include <rclc/executor.h> // 引入ROS C的执行器库 #include <micro_ros_utilities/type_utilities.h> // 引入Micro ROS的实用程序库 #include <micro_ros_utilities/string_utilities.h> // 引入Micro ROS的字符串实用程序库 #include <std_msgs/msg/int32.h> // 引入整数消息类型库 #include <std_msgs/msg/string.h> // 引入字符串消息类型库 // 判断是否定义了特定宏,如果没有则报错 #if !defined(ARDUINO_NANO_RP2040_CONNECT) #error This example is only avaible for Arduino Nano RP2040 Connect #endif // 定义发布器变量 rcl_publisher_t string_publisher; // 字符串消息发布器 rcl_publisher_t pedometer_publisher; // 步数消息发布器 // 定义消息变量 std_msgs__msg__String string_msg; // 字符串消息 std_msgs__msg__Int32 pedometer_msg; // 步数消息 // 定义支持、分配器和节点变量 rclc_support_t support; // ROS C的执行器支持 rcl_allocator_t allocator; // ROS C的内存分配器 rcl_node_t node; // ROS C节点 // 定义LED引脚和宏定义 #define LED_PIN 13 // LED引脚定义 #define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}} // 用于检查函数返回值的宏定义,如果不成功则进入错误循环 #define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}} // 与RCCHECK相反,不进行错误处理,直接忽略错误 // 中断变量和组件初始化 volatile int mems_event = 0; // 中断标志变量 LSM6DSOXSensor AccGyr(&Wire, LSM6DSOX_I2C_ADD_L); // LSM6DSOX传感器初始化 // MLC和其他变量初始化 ucf_line_t *ProgramPointer; // MLC指针变量,用于指向程序指针 int32_t LineCounter; // 行计数器变量,用于计数行数 int32_t TotalNumberOfLine; // 总行数变量,用于存储总行数 // 定义错误循环函数,用于不断翻转LED灯的状态直到程序停止运行 void error_loop(){ while(1){ digitalWrite(LED_PIN, !digitalRead(LED_PIN)); delay(100); }} // 设置函数,用于设置Micro ROS和Arduino相关的参数和初始化硬件设备等操作 void setup() { set_microros_wifi_transports("WIFI SSID", "WIFI PASS", "192.168.1.57", 8888); // 设置Micro ROS的传输方式,包括WiFi的SSID、密码、IP地址和端口号等参数 pinMode(LED_PIN, OUTPUT); // 设置LED引脚为输出模式 digitalWrite(LED_PIN, HIGH); // 将LED灯打开,点亮LED灯 delay(100); // 延迟100毫秒,给硬件设备留出初始化时间 allocator = rcl_get_default_allocator(); // 获取默认的内存分配器; // 获取默认的内存分配器rcl_ret_t rc = rclc_support_init(&support, "nano_ros_arduino", &rcl_get_default_context(), &allocator); // 初始化执行器支持,传入节点名和上下文指针以及内存分配器指针
RCCHECK(rc); // 检查函数返回值
rcl_node_options_t node_options = rclc_node_get_default_options(); // 获取默认的节点选项
node_options.use_sim_time = false; // 不使用模拟时间
rc = rclc_node_init(&node, "nano_ros_node", "1", &support, &node_options); // 初始化ROS节点,传入节点名、支持、上下文指针和节点选项指针
RCCHECK(rc); // 检查函数返回值
rclc_publisher_init(&string_publisher, &node, std_msgs__msg__String::type_support, 10); // 初始化字符串消息发布器,传入节点指针、消息类型支持、最大发布者数量
rclc_publisher_init(&pedometer_publisher, &node, std_msgs__msg__Int32::type_support, 10); // 初始化步数消息发布器,传入节点指针、消息类型支持、最大发布者数量
ProgramPointer = (ucf_line_t *) &lsm6dsoxaccgyro_ucf; // 将指针变量ProgramPointer指向LSM6DSOX传感器的用户配置表
TotalNumberOfLine = sizeof(lsm6dsoxaccgyro_ucf) / sizeof(ucf_line_t); // 计算用户配置表的总行数
AccGyr.Init(); // 初始化LSM6DSOX传感器
}// 循环函数,用于不断读取传感器数据并发布到ROS中 void loop() { std_msgs__msg__String string_msg; string_msg.data = ""; std_msgs__msg__Int32 pedometer_msg; pedometer_msg.data = 0; uint8_t buffer[64]; int8_t interrupt = 0; AccGyr.ReadData(); // 读取LSM6DSOX传感器数据 if (AccGyr.CheckEvent(LSM6DSOX_EVENT)) { // 如果传感器产生事件 interrupt = AccGyr.GetEvent(); // 获取事件类型 if (interrupt == LSM6DSOX_INTERRUPT) { // 如果事件类型为中断事件 mems_event = 1; // 将中断标志变量置为1 } } if (AccGyr.CheckODR(LSM6DSOX_ODR)) { // 如果传感器产生ODR事件 AccGyr.GetStepCount(pedometer_msg.data); // 获取步数并保存在pedometer_msg中 pedometer_msg.data /= 2; // 将步数除以2,因为传感器检测到的是两步为一跳的步数 pedometer_msg.data = constrain(pedometer_msg.data, -500, 500); // 将步数限制在-500到500之间 string_msg.data = (const char *) &buffer[0]; // 将字符串消息的数据指针指向buffer数组的首地址 sprintf((char *) string_msg.data, "Step: %d", pedometer_msg.data); // 将步数格式化为字符串保存在buffer数组中,并作为字符串消息的数据 rclc_publisher_publish(&string_publisher, &string_msg); // 发布字符串消息 rclc_publisher_publish(&pedometer_publisher, &pedometer_msg); // 发布步数消息 } if (mems_event == 1) { // 如果中断标志变量为1 mems_event = 0; // 将中断标志变量置为0 AccGyr.ReadData(); // 读取LSM6DSOX传感器数据 AccGyr.GetStepCount(pedometer_msg.data); // 获取步数并保存在pedometer_msg中 pedometer_msg.data /= 2; // 将步数除以2,因为传感器检测到的是两步为一跳的步数 pedometer_msg.data = constrain(pedometer_msg.data, -500 , 500); // 将步数限制在-500到500之间
string_msg.data = (const char *) &buffer[0]; // 将字符串消息的数据指针指向buffer数组的首地址
sprintf((char *) string_msg.data, "Step: %d", pedometer_msg.data); // 将步数格式化为字符串保存在buffer数组中,并作为字符串消息的数据
rclc_publisher_publish(&string_publisher, &string_msg); // 发布字符串消息
rclc_publisher_publish(&pedometer_publisher, &pedometer_msg); // 发布步数消息
}
delay(100); // 延迟100毫秒,给传感器留出时间处理数据
}
}在代码中,首先引入了所需的头文件,包括Micro ROS和传感器库的头文件,以及标准输入输出库等。然后,定义了ROS节点句柄和两个发布器,一个用于发布字符串消息,另一个用于发布整型消息。
在setup()函数中,初始化了LSM6DSOX传感器并配置其寄存器,同时也初始化了ROS节点和发布器。然后,在每次循环中,从传感器读取数据,并根据传感器数据判断人的运动状态,将运动状态以字符串形式保存在string_msg中。同时,通过调用AccGyr.Get_Step_Count()函数获取步数,将步数保存在pedometer_msg.data中。最后,通过调用rcl_publish()函数发布这两个消息。
其中,RCCHECK()和RCSOFTCHECK()是两个用于检查函数返回值的宏定义。RCCHECK()会在函数返回不正确时调用error_loop()函数,而RCSOFTCHECK()仅会在函数返回不正确时进行断言。
此外,代码中还使用了中断来处理传感器的中断事件。当传感器产生中断时,会将mems_event变量置为1,在循环中可以通过检查此变量来得知是否有中断事件发生。
整个程序的流程是:在setup()函数中进行初始化,然后在每次循环中读取传感器数据、判断运动状态、获取步数、发布消息,并使用中断处理传感器中断事件。最后,通过delay()函数给传感器留出时间处理数据。
然后让ai写代码,写出来的也不怎么样呢。
看来程序还是太新了。

相关文章:
micro-ros IMU ML 代码
示例代码: #include <micro_ros_arduino.h>#include "LSM6DSOXSensor.h" #include "lsm6dsox_activity_recognition_for_mobile.h"#include <stdio.h> #include <rcl/rcl.h> #include <rcl/error_handling.h> #inclu…...

二十三种设计模式第二十四篇--访问者模式(完结撒花)
在访问者模式(Visitor Pattern)中,我们使用了一个访问者类,它改变了元素类的执行算法。 通过这种方式,元素的执行算法可以随着访问者改变而改变。 这种类型的设计模式属于行为型模式。根据模式,元素对象已接…...

月报总结|Moonbeam 7月份大事一览
炎炎夏日,Moonbeam于越南举办了线下交流会,在EthCC 2023和以太坊社区成员共同讨论多链应用,在Polkadot Decoded中分享了Moonbeam的与众不同之处。 Bear Necessities Hackathon也于本月圆满结束,选出了每个赛道最杰出的项目&#…...

【2023.8】docker一键部署wvp-GB28181-pro和ZLMediaKit过程全记录
安装docker 使用的操作系统是ubuntu20.04 如何在 Ubuntu 20.04 上安装和使用 Docker https://developer.aliyun.com/article/762674 docker拉取配置好的ZLMediaKIt和wvp-GB28181-pro docker pull 648540858/wvp_pro第一次运行 docker一键运行ZLMediaKIt和wvp-GB28181-pro …...

【2023】字节跳动 10 日心动计划——第四关
目录 1. 买卖股票的最佳时机2. 打家劫舍 II 1. 买卖股票的最佳时机 🔗 原题链接:121. 买卖股票的最佳时机 假设在第 i i i 天卖出股票可获得最大利润,那么买入股票必然是在前 i − 1 i-1 i−1 天中的某一天。更进一步,买入股票应…...
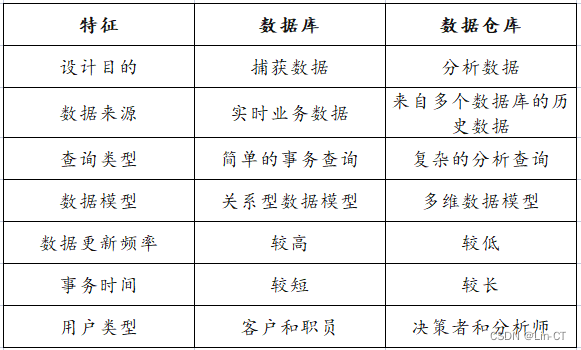
数据库与数据仓库的区别及关系
数据库与数据仓库的区别及关系 数据库数据仓库异同差异联系例子 数据库 数据库是结构化信息或数据的有序集合,一般以电子形式存储在计算机系统中。通常由数据库管理系统 (DBMS) 来控制。它是一个长期存储在计算机内的、有组织的、可共享的、统一管理的大量数据的集…...
Emacs之设置行号前景颜色(字体颜色)/背景颜色/光标颜色/背景透明度(一百二十七)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 人生格言: 人生…...

【hive经典指标,离线数仓指标,ADS层指标分析】最近7日内连续3日下单用户数
1.建表语句 DROP TABLE IF EXISTS ads_order_continuously_user_count; CREATE EXTERNAL TABLE ads_order_continuously_user_count (dt STRING COMMENT 统计日期,recent_days BIGINT COMMENT 最近天数,7:最近7天,order_continu…...

线上java程序CPU及内存占用过高问题排查总结
背景 最近发现线上的一个JAVA程序总是过段时间慢慢卡死,最后导致无法提供服务,外部请求接口超时。 经排查发现,该程序CPU及内存占用都很高,导致整个系统负载很高。 到这里,就想到了对程序内存进行分析。排查过程 查询…...

c高级:day3
作业: 1. 整理思维导图 2.判断家目录下,普通文件的个数和目录文件的个数 #!/bin/bash ######################################################################## # File Name: zy1.sh # Created Time: 2023年08月04日 星期五 19时13分08秒 ##############################…...

Java检查值是否存在于数组中的3种方法
在 Java 中,有许多方法可以检查此数组中是否存在特定元素。 1)使用线性搜索方法 时间复杂度:O(N) 辅助空间:O(1) for (int element : arr) { if (element toCheckValue) { return true; } } 示例代码: import java.ut…...
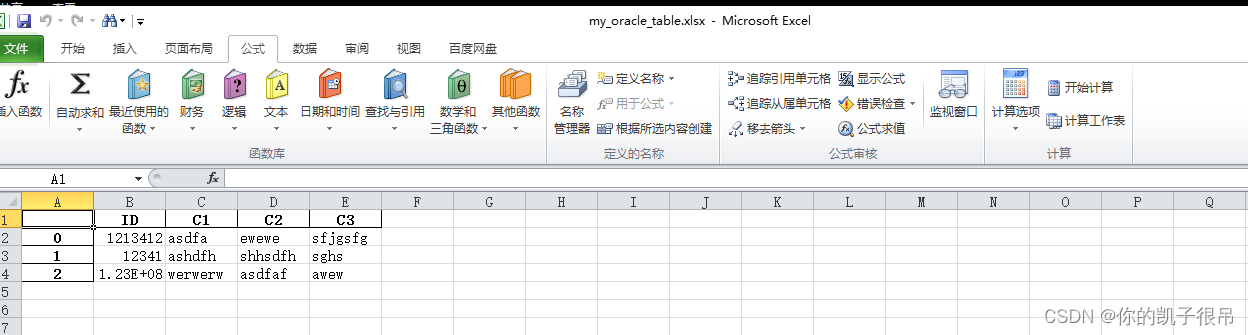
python 连接oracle pandas以简化excel的编写和数据操作
python代码 Author: liukai 2810248865qq.com Date: 2022-08-18 04:28:52 LastEditors: liukai 2810248865qq.com LastEditTime: 2023-07-06 22:12:56 FilePath: \PythonProject02\pandas以简化excel的编写和数据操作.py Description: 这是默认设置,请设置customMade, 打开koro…...
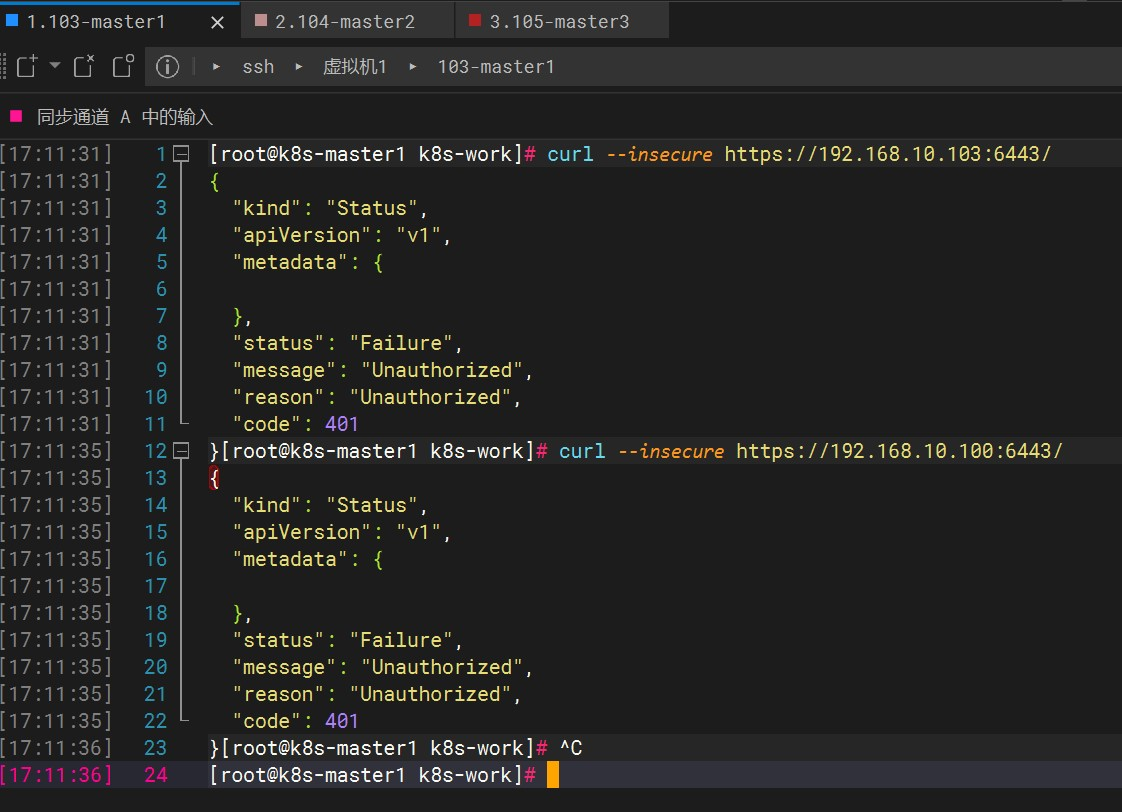
Kubernetes高可用集群二进制部署(三)部署api-server
Kubernetes概述 使用kubeadm快速部署一个k8s集群 Kubernetes高可用集群二进制部署(一)主机准备和负载均衡器安装 Kubernetes高可用集群二进制部署(二)ETCD集群部署 Kubernetes高可用集群二进制部署(三)部署…...

【网络|TCP】三次握手、四次握手
TCP是一种面向连接的可靠的传输协议,建立和断开TCP连接时需要进行握手的过程。其中,TCP的连接建立需要进行三次握手,而连接断开则需要进行四次握手。 解释 三次握手 第一次握手:客户端发送一个SYN(同步)报…...
刷题笔记 day7
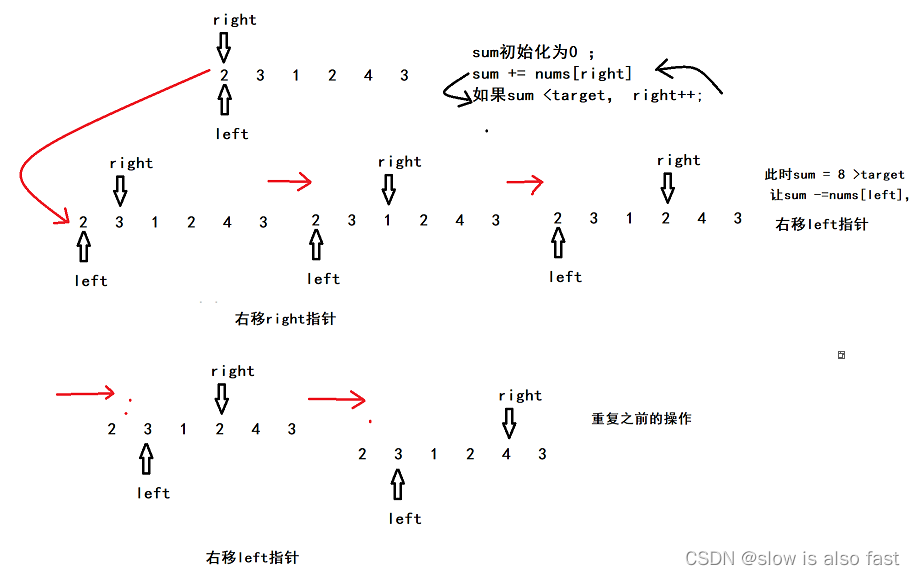
力扣 209 长度最小的子数组 解法:滑动指针(对同向双指针区间内的数据处理) 1)先初始化 两个指针 left ,right。 2)右移指针right的同时使用sum记录指针right处的值,并判断sum的值是否满足要求&…...

Tuxera NTFS2023Mac强大的Mac读写工具
Mac用户在使用NTFS格式移动硬盘时,会遇到无法写入硬盘的情况。要想解决无法写入的问题,很多人选择使用Mac读写软件。面对市面上“众多”的读写硬盘软件,用户应该怎么选择呢?初次接触移动硬盘的伙伴可能不知道移动硬盘怎么和电脑连…...

ARM64 常见汇编指令学习 11 -- ARM 汇编宏 .macro 的学习
文章目录 ARM 汇编宏介绍ARM 汇编宏的使用 下篇文章:ARM64 常见汇编指令学习 12 – ARM 汇编函数 的学习 上篇文章:ARM64 常见汇编指令学习 10 – 无符号位域提取指令 BFXIL ARM 汇编宏介绍 在 ARM 汇编中,“.macro” 是用来定义一个宏的指…...

数据库的分库分表
#!/bin/bash ######################### #File name:db_fen.sh #Version:v1.0 #Email:admintest.com #Created time:2023-07-29 09:18:52 #Description: ########################## MySQL连接信息 db_user"root" db_password"RedHat123" db_cmd"-u${…...
[Docker实现测试部署CI/CD----相关服务器的安装配置(2)]
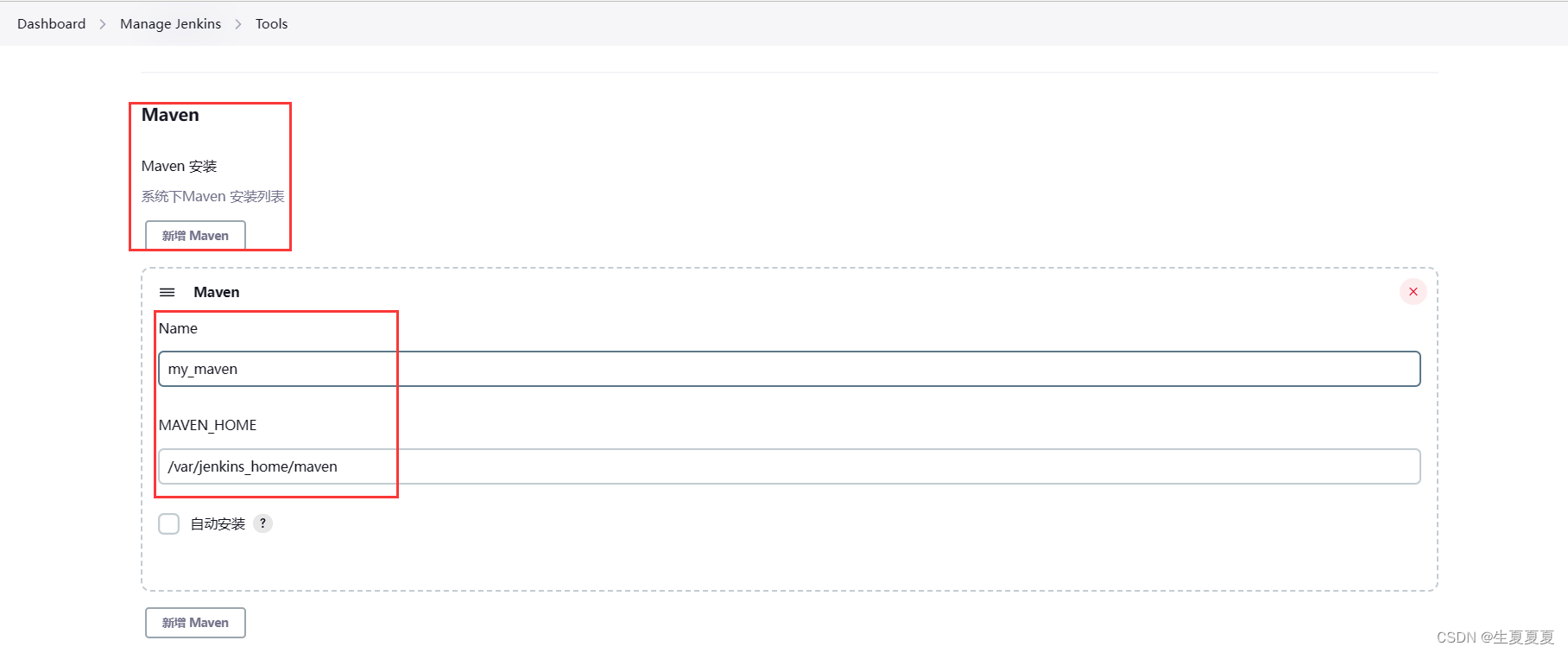
目录 6、Jenkins安装配置安装jdk安装maven拉取镜像启动jenkins修改数据卷权限浏览器访问安装插件配置jenkins移动JDK和Maven配置JDK和Maven 6、Jenkins安装配置 Jenkins 是一个开源软件项目,是基于 Java 开发的一种持续集成工具,用于监控持续重复的工作&…...
)
LC-980. 不同路径 III(回溯)
980. 不同路径 III 难度困难291 在二维网格 grid 上,有 4 种类型的方格: 1 表示起始方格。且只有一个起始方格。 2 表示结束方格,且只有一个结束方格。 0 表示我们可以走过的空方格。 -1 表示我们无法跨越的障碍。 返回在四个方向&…...

5分钟搞定AI摄影:Realistic Vision V5.1快速部署与参数调优全攻略
5分钟搞定AI摄影:Realistic Vision V5.1快速部署与参数调优全攻略 1. 认识Realistic Vision V5.1:你的虚拟摄影师 Realistic Vision V5.1是目前Stable Diffusion生态中最强大的写实风格图像生成模型之一。它就像一个24小时待命的专业摄影师,…...

2026 年 Java 学习网站深度评测|为什么首选慕课网?
Java 稳居企业级开发语言榜首,2026 年国内 Java 岗位超 120 万个,但60% 求职者因缺乏体系化学习与实战经验被淘汰。选对平台 成功一半。对比 CSDN、牛客、黑马,慕课网以 “体系闭环、实战为王、大厂赋能” 三大核心优势,成为 202…...
Pixel Script Temple 快速上手:5步完成Visual Studio Code集成与调用
Pixel Script Temple 快速上手:5步完成Visual Studio Code集成与调用 1. 引言 作为一名开发者,你是否经常遇到这样的场景:面对复杂的业务逻辑需要快速生成代码框架,或者需要为已有代码添加详细注释?Pixel Script Tem…...
)
【工业PHP物联网网关开发实战指南】:从零搭建高并发、低延迟数据中继系统(含Modbus/TCP+MQTT双协议栈源码)
第一章:工业PHP物联网数据网关开发概览工业物联网(IIoT)场景中,PHP 作为成熟稳定的后端语言,正以轻量、可扩展、易集成的特性,在边缘侧数据网关开发中焕发新生。本章聚焦于构建一个面向工业现场的 PHP 数据…...

OpenClaw与竞品对比:千问3.5-27B在本地自动化场景的优势
OpenClaw与竞品对比:千问3.5-27B在本地自动化场景的优势 1. 为什么需要对比本地自动化工具? 作为一个长期折腾本地AI工具的开发者,我经历过太多"看起来很美"的自动化框架。从早期的AutoGPT到后来的BabyAGI,每次满怀期…...

Youtu-Parsing开源文档解析模型详解:像素级定位+RAG就绪JSON/Markdown输出
Youtu-Parsing开源文档解析模型详解:像素级定位RAG就绪JSON/Markdown输出 你是不是经常遇到这样的烦恼?拿到一份扫描的PDF合同,想把里面的表格数据提取出来,结果复制粘贴后格式全乱了;或者收到一张带公式的学术论文截…...
FireRedASR-AED-L环境配置:CUDA 11.8 + PyTorch 2.1.2 + Transformers 4.41一键集成
FireRedASR-AED-L环境配置:CUDA 11.8 PyTorch 2.1.2 Transformers 4.41一键集成 1. 项目简介 FireRedASR-AED-L是一个基于1.1B参数大模型开发的本地语音识别工具,专为中文、方言和中英混合语音识别而设计。这个工具最大的特点是完全本地运行…...

WiiChuk_compat:高兼容Nunchuk驱动库详解
1. WiiChuk_compat 库概述WiiChuk_compat 是一个专为嵌入式平台设计的开源 Arduino 兼容库,其核心目标是实现对任天堂 Wii 遥控器扩展配件——Nunchuk(常被误拼为 “Numchuck”、“Nunchuck” 或 “Nunchuk”)的高可靠性、宽兼容性 IC 接口驱…...

鸿蒙_ArkUI组件同时支持双击和单击事件
我们常用的点击事件是onClick,想要实现双击需要用TapGesture手势实现,那么如果一个组件同时需要支持单击和双击,则需要使用GestureGroup,我们新建一个页面来测试一下:Entry Component struct TestDoubleClick {State m…...

3.一文看懂反向传播:从单个神经元到 PyTorch 自动求导
反向求导,多层次对应一个神经,单个神经元场景 学习这一篇的前提是,已经学会了梯度算法和线性结构算法,不明白的可以去看我之前的文章。 前面看不懂的,直接跳转到 “ 反向传播的流程 ” 底层的数学算法 z 是中间变量 u …...