Opencv-C++笔记 (14) : 霍夫变换(直线、圆)
文章目录
- 一、霍夫变换-直线
- 1.1霍夫变换-直线 原理详解
- 二、霍夫圆检测
一、霍夫变换-直线
Hough Line Transform用来做直线检测
前提条件 – 边缘检测已经完成
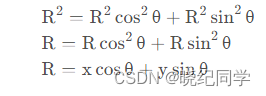
1、平面空间(x,y)到极坐标空间转换;

2、对极坐标进行变换,转化为θ与R的关系
1.1霍夫变换-直线 原理详解
对于任意一条直线上的所有点来说,变换到极坐标中,从[0~360]空间,可以得到r的大小,属于同一条直线上点在极坐标空 ( r , θ ) (r, \theta)(r,θ) 必然在一个点上有最强的信号出现,根据此反算到平面坐标中就可以得到直线上各点的像素坐标。从而得到直线。
标准的霍夫变换 cv::HoughLines 从平面坐标转换到霍夫空间,最终输出是 ( r , θ ) (r, \theta)(r,θ) 表示极坐标空间
void HoughLines(
InputArray image, 输入图像,必须8-bit的灰度图像
OutputArray lines, 输出的极坐标来表示直线
double rho, 极坐标素扫描步长
double theta, 极坐标角度步长,一般取值CV_PI/180
int threshold, 阈值,多少交点的极坐标点才被看成是直线
double srn = 0, 是否应用多尺度的霍夫变换,默认0表示经典霍夫变换
double stn = 0, 是否应用多尺度的霍夫变换,默认0表示经典霍夫变换
double min_theta = 0, 表示角度扫描范围 0 ~180之间, 默认即可
double max_theta = CV_PI
);
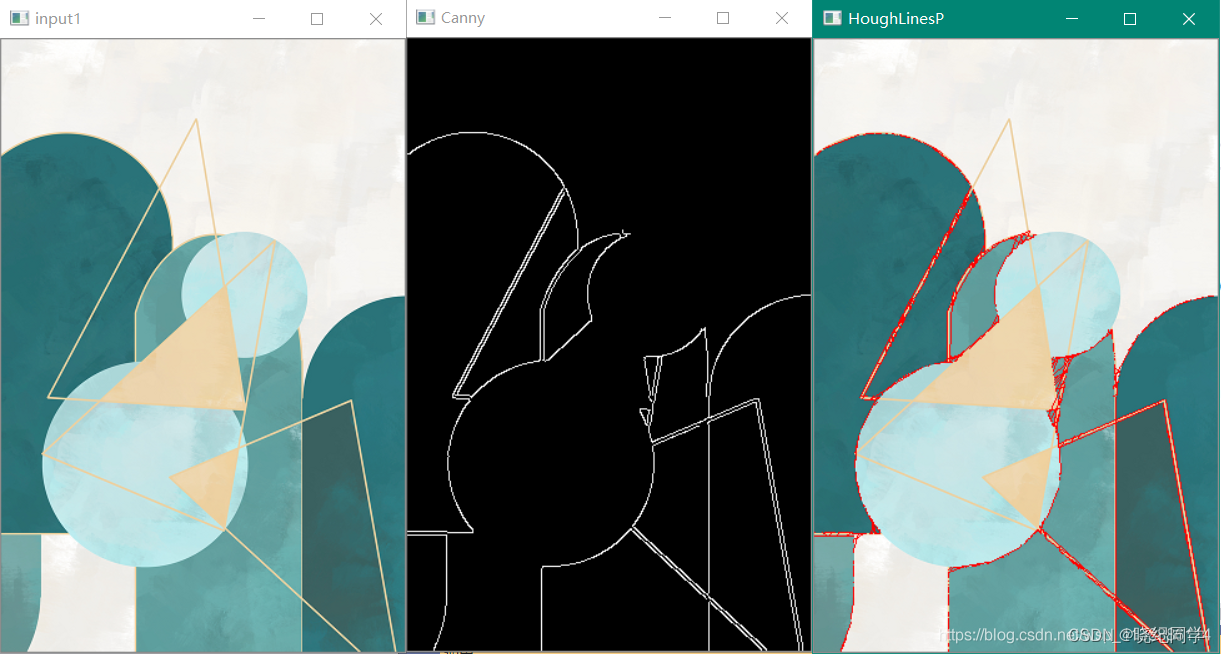
霍夫变换直线概率 cv::HoughLinesP最终输出是直线的两个点 ( x 0 , y 0 , x 1 , y 1 )
void HoughLinesP(
InputArray image, 输入图像,必须8-bit的灰度图像
OutputArray lines, 输出的极坐标来表示直线
double rho, 极坐标像素扫描步长
double theta, 极坐标角度步长,一般取值CV_PI/180
int threshold, 阈值,多少交点的极坐标点才被看成是直线
double minLineLength = 0, 最小直线长度
double maxLineGap = 0 ); 最大间隔
//头文件 quick_opencv.h:声明类与公共函数
#pragma once
#include <opencv2\opencv.hpp>
using namespace cv;class QuickDemo {
public:...void hough_Demo(Mat& image1);void laplance_Demo(Mat& image1);void canny_Demo(Mat& image1);
};
//主函数调用该类的公共成员函数
#include <opencv2\opencv.hpp>
#include <quick_opencv.h>
#include <iostream>
using namespace cv;int main(int argc, char** argv) {Mat src = imread("D:\\Desktop\\jianbian.png");if (src.empty()) {printf("Could not load images...\n");return -1;}QuickDemo qk;qk.hough_Demo(src1);qk.hough_Demo(src1);qk.canny_Demo(src1);waitKey(0);destroyAllWindows();return 0;
}
void QuickDemo::hough_Demo(Mat& image) {Mat image_line = image.clone();// 霍夫直线检测Mat gau_dst, gray_dst, grad_dst;GaussianBlur(image_line, gau_dst, Size(3, 3), 10);cvtColor(gau_dst, gray_dst, COLOR_BGR2GRAY);vector<Vec4f> plines;Canny(gray_dst, gray_dst, 100, 200);imshow("Canny", gray_dst);HoughLinesP(gray_dst, plines, 5, CV_PI/180, 10, 0, 10);// 斜线检测调整maxlineGapcout << "线条个数:" << plines.size() << endl;for (int i = 0; i < plines.size(); i++) {Vec4f hline = plines[i];line(image_line, Point(hline[0], hline[1]), Point(hline[2], hline[3]), Scalar(0, 0, 255), 1, 8, 0);}imshow("HoughLinesP", image_line);// 霍夫圆检测Mat median_dst, gray_median_dst;vector<Vec3f> pcircles;medianBlur(image, median_dst, 3);cvtColor(median_dst, gray_median_dst, COLOR_BGR2GRAY);HoughCircles(gray_median_dst, pcircles, HOUGH_GRADIENT, 1, 10, 100, 30, 5, 100);cout << "圆形个数:" << pcircles.size() << endl;for (int i = 0; i < pcircles.size(); i++) {Vec3f cc = pcircles[i];circle(image, Point(cc[0], cc[1]), cc[2], Scalar(255, 0, 0), 2, 8, 0);circle(image, Point(cc[0], cc[1]), 2, Scalar(255, 0, 0), 2, 8, 0); // 标注圆形}imshow("circle", image);
}
二、霍夫圆检测
算法详情见:霍夫圆检测 官方给出了好的示例。
对直线来说,一条直线能由极径极角 ( r , θ ) (r,θ)(r,θ) 表示,而对于圆来说,我们需要三个参数:圆心( a , b ) (a,b)(a,b),半径 r 。
笛卡尔坐标系中圆的方程为:
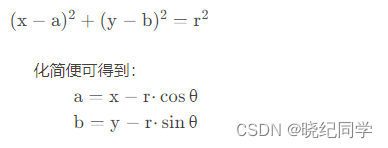
这就意味着每一组(a,b,r)代表一个通过点(x0,y0)的圆。
对于一个给定点(x0,y0),我们可以在三维直角坐标系中,绘出所有通过它的圆。最终我们将得到一条三维的曲线。
由于霍夫线变换圆检测对噪声比较敏感,所以首先要对图像做中值滤波,而且需要更多的检测计算消耗。OpenCV 霍夫圆变换对标准霍夫圆变换做了运算上的优化。它采用的是 “霍夫梯度法”。
基于效率考虑,Opencv中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步:
- 检测边缘,发现可能的圆心
- 基于第一步的基础上从候选圆心开始计算最佳半径大小
霍夫梯度法的原理
估计圆心
1、把原图做一次 Canny 边缘检测,得到边缘检测的二值图。
对原始图像执行一次 Sobel 算子,计算出所有像素的邻域梯度值。
初始化圆心空间 N(a,b),令所有的 N(a,b)=0。
遍历 Canny 边缘二值图中的所有非零像素点,沿着梯度方向 ( 切线的垂直方向 )画线,将线段经过的所有累加器中的点 (a,b) 的 N(a,b)+=1。
void HoughCircles(
InputArray image, 输入图像 ,必须是8位的单通道灰度图像
OutputArray circles, 输出结果,发现的圆信息
int method, HOUGH_GRADIENT
double dp, dp = 1 累加器图像的反比分辨率
double minDist=src_gray.rows/8, 检测到圆心之间的最小距离,否则认为是同心圆-
double param1 = 100, canny edge detection low threshold
double param2 = 100, 中心点累加器阈值 – 候选圆心
int minRadius = 0, 能检测到的最小圆半径, 默认为0
int maxRadius = 0 能检测到的最大圆半径, 默认为0
);
参数:
第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的灰度单通道图像。
第二个参数,InputArray类型的circles,经过调用HoughCircles函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了3个元素的浮点矢量(x, y, radius)表示。
第三个参数,int类型的method,即使用的检测方法,目前OpenCV中就霍夫梯度法一种可以使用,它的标识符为CV_HOUGH_GRADIENT,在此参数处填这个标识符即可。
第四个参数,double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度。
第五个参数,double类型的minDist,为霍夫变换检测到的圆的圆心之间的最小距离,即让我们的算法能明显区分的两个不同圆之间的最小距离。这个参数如果太小的话,多个相邻的圆可能被错误地检测成了一个重合的圆。反之,这个参数设置太大的话,某些圆就不能被检测出来了。
第六个参数,double类型的param1,有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示传递给canny边缘检测算子的高阈值,而低阈值为高阈值的一半。
第七个参数,double类型的param2,也有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了。
第八个参数,int类型的minRadius,有默认值0,表示圆半径的最小值。
第九个参数,int类型的maxRadius,也有默认值0,表示圆半径的最大值。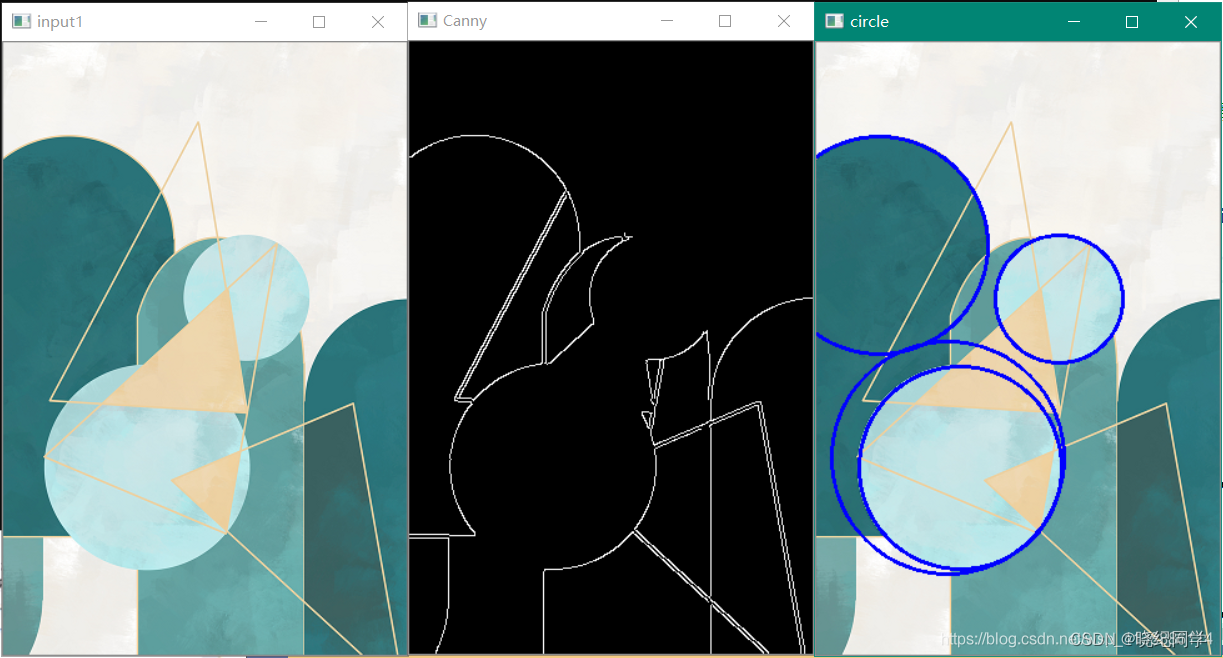
相关文章:
Opencv-C++笔记 (14) : 霍夫变换(直线、圆)
文章目录 一、霍夫变换-直线1.1霍夫变换-直线 原理详解 二、霍夫圆检测 一、霍夫变换-直线 Hough Line Transform用来做直线检测 前提条件 – 边缘检测已经完成 1、平面空间(x,y)到极坐标空间转换; 2、对极坐标进行变换,转化为…...
栈和队列(一) 栈操作详解
文章目录 一、物理结构和逻辑结构二、栈1、什么是栈2、栈中一些基本操作的实现Stack.hStack.c栈的初始化栈的销毁入栈出栈获得栈顶元素获得栈的元素数判断栈空 三、利用栈解决问题 一、物理结构和逻辑结构 栈和队列都属于逻辑结构,它们既可以用数组实现也可以用链表…...

软考A计划-系统集成项目管理工程师-信息系统安全管理-下
点击跳转专栏>Unity3D特效百例点击跳转专栏>案例项目实战源码点击跳转专栏>游戏脚本-辅助自动化点击跳转专栏>Android控件全解手册点击跳转专栏>Scratch编程案例点击跳转>软考全系列点击跳转>蓝桥系列 👉关于作者 专注于Android/Unity和各种游…...

Spark知识点总结
1. Spark支持哪几种运行模式? 本地模式(Local Mode):在这种模式下,Spark在单个机器上运行。所有的Spark操作都在一个单独的JVM进程中进行。这种模式适合开发和测试,但不适合处理大规模的数据。 集群模式&a…...
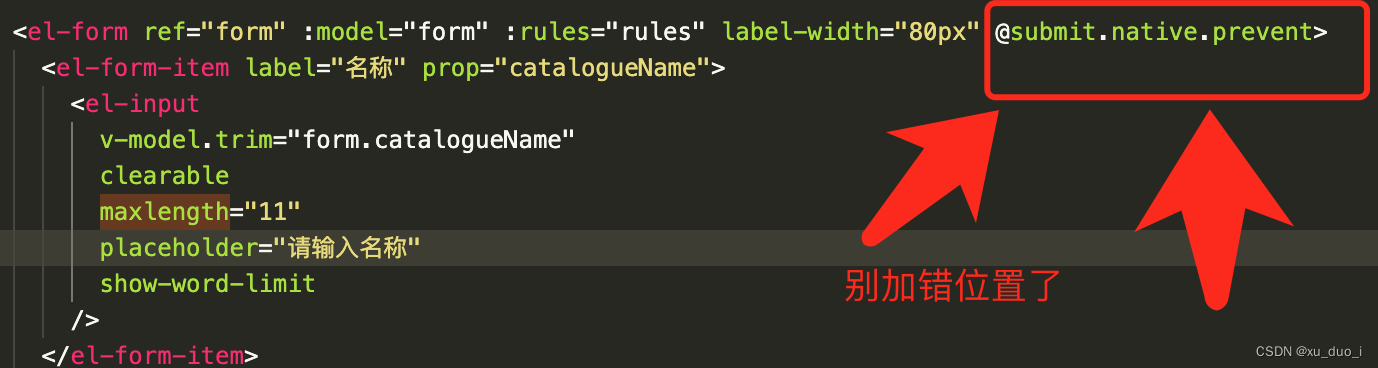
vue el-input 使用 回车键会刷新页面的问题
场景: vue项目中 在输入框输入字符并按下回车键搜索时,不会进行搜索, 而是会刷新页面 原因: 当form表单中只有一个input时,按下回车建会自动触发页面的提交功能, 产生刷新页面的行为 解决: 在…...

【ARM64 常见汇编指令学习 12 -- ARM 汇编函数 的学习】
文章目录 1.1 ARM 汇编函数简介1.1.1 ARM 汇编标签 Label1.1.2 ARM 汇编函数属性指令1.1.3 UEFI 中的函数宏:ASM_FUNC1.1.3.1 UEFI ASM_FUNC 实现汇编函数 1.1.4 UEFI 预编译前缀宏 ASM_PFX 上篇文章:ARM64 常见汇编指令学习 11 – ARM 汇编宏 .macro 的…...

linux下软件安装 - 与GPT对话
1 cmake 没有uninstall 你是对的,CMake 默认情况下并没有提供 make uninstall 目标。这是因为 make install 操作是在特定的目录下进行安装的,CMake 不知道安装到了哪里以及哪些文件被安装了。因此,没有直接支持的 make uninstall 目标来进行卸载。 如果你想要卸载通过 mak…...
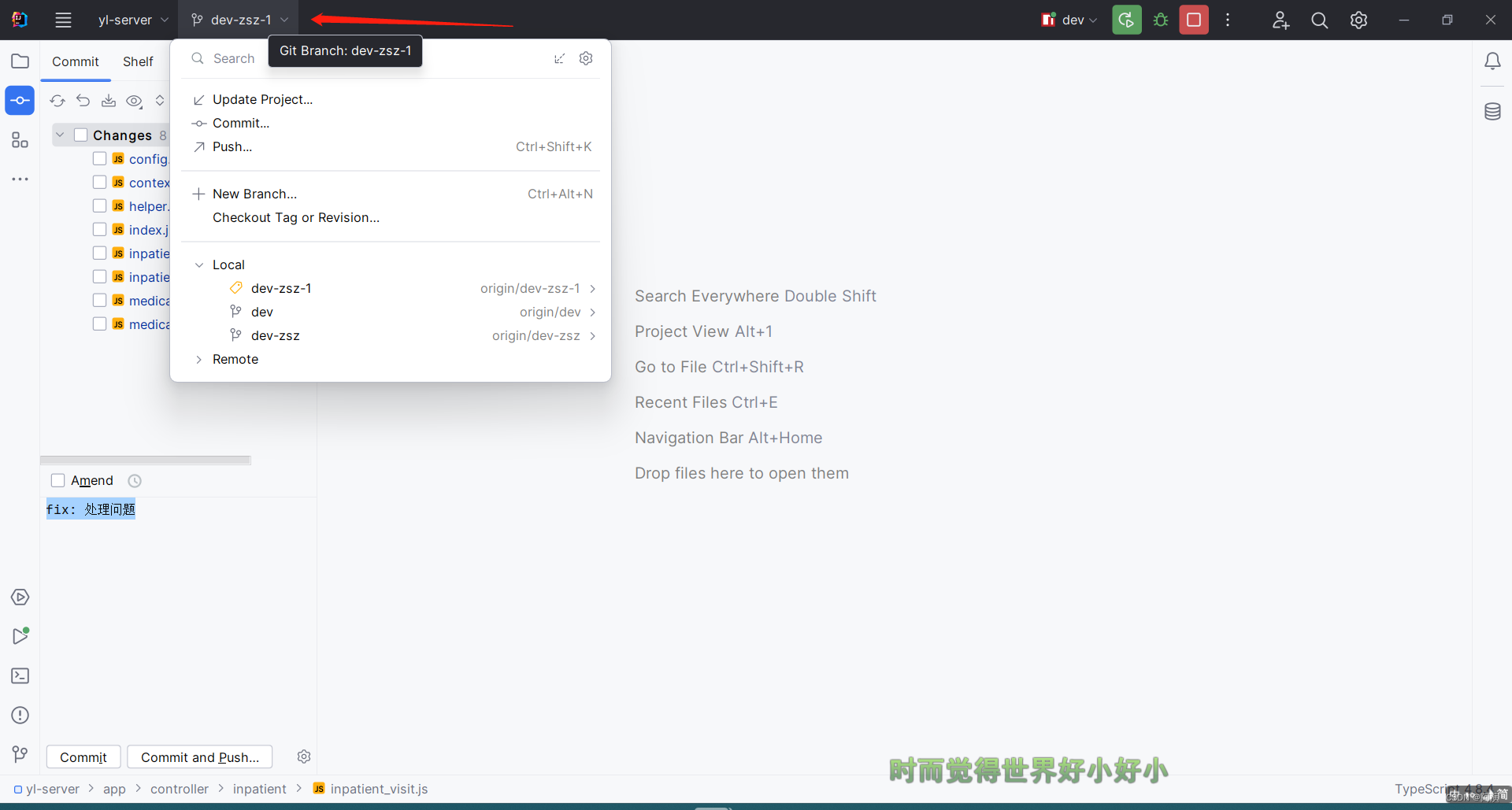
idea 2023 新版ui中git的相关操作
前两个月换了新电脑,下了最新版的idea发现可以切换一套新的ui了 切换新ui肯定不太习惯,很多操作都得重新摸索一下 在这里记录几个git相关的操作 忽略我下面截图中当前项目是js的后端项目…… 切换ui 首先说一下怎么切换新旧版ui,我这里就…...

vue3—SCSS的安装、配置与使用
SCSS 安装 使用npm安装scss: npm install sass sass-loader --save-dev 配置 配置到全局 🌟附赠代码🌟 css: {preprocessorOptions: {scss: {additionalData:import "./src/Function/Easy_I_Function/Echarts/ToSeeEcharts/utill.…...

Godot 4 源码分析 - Path2D与PathFollow2D
学习演示项目dodge_the_creeps,发现里面多了一个Path2D与PathFollow2D 研究GDScript代码发现,它主要用于随机生成Mob var mob_spawn_location get_node(^"MobPath/MobSpawnLocation")mob_spawn_location.progress randi()# Set the mobs dir…...
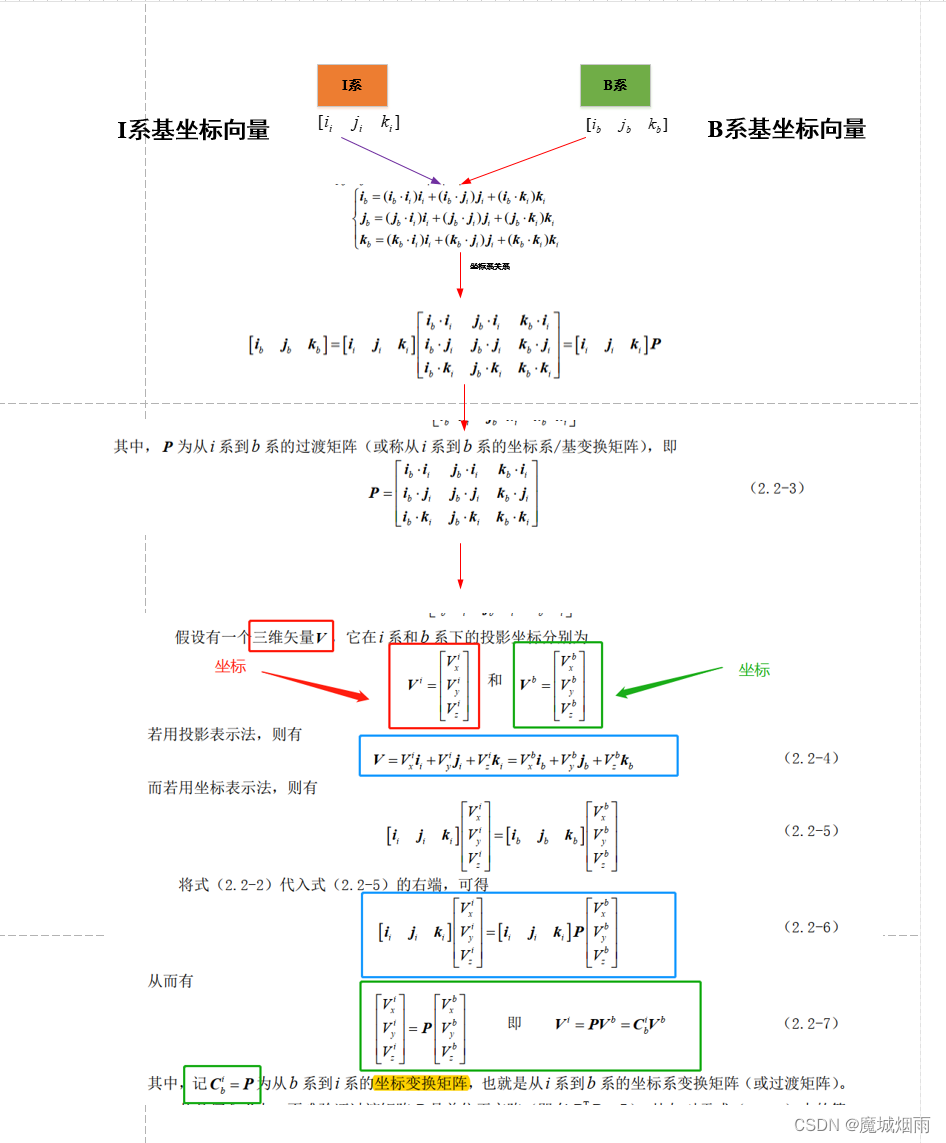
ardupilot 中坐标变换矩阵和坐标系变换矩阵区别
目录 文章目录 目录摘要1.坐标变换矩阵与坐标系变换矩阵摘要 本节主要记录ardupilot 中坐标变换矩阵和坐标系变换矩阵的区别,这里非常重要,特别是进行姿态误差计算时,如果理解错误,很难搞明白后面算法。 1.坐标变换矩阵与坐标系变换矩阵 坐标变换矩阵的本质含义:是可以把…...
VR内容研发公司 | VR流感病毒实验虚拟现实课件
由广州华锐互动开发的《VR流感病毒实验虚拟现实课件》是一种新型的教学模式,可以为学生提供更加真实和直观的流感病毒分离鉴定实验操作体验,从而提高学生的实验技能和工作效率。 《VR流感病毒实验虚拟现实课件》涉及了生物安全二级实验室(BSL-2)和流感病…...
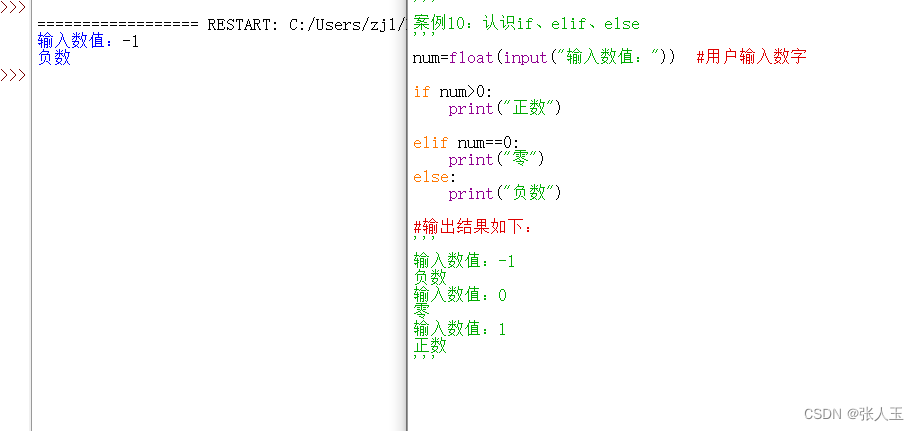
python——案例10:认识if、elif、else
案例10:认识if、elif、elsenumfloat(input("输入数值:")) #用户输入数字if num>0:print("正数")elif num0:print("零") else:print("负数")#输出结果如下:输入数值:-1 负数 输入数值…...

Hadoop中命令检查hdfs的文件是否存在
Hadoop中命令检查hdfs的文件是否存在 在Hadoop中,可以使用以下命令检查HDFS文件是否存在: hadoop fs -test -e 其中,是要检查的HDFS文件的路径。 如果文件存在,命令返回0;如果文件不存在,命令返回非0值…...

计算机网络用户接入层设计
用户接入层为用户提供访问核心网络的能力, 为用户提供共享/交换的带宽分配,按照业主要求,并考虑到端口密度的要求以及 设备的性能价格比,建议选用 Catalyst 3524XL和 Catalyst 3548XL 工作组交换 机,分别放置于配线间中。如同一配线间需两台以…...

全志F1C200S嵌入式驱动开发(应用程序开发)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 我们在开发soc驱动的时候,很多情况下也要验证下当前的驱动功能是否正确。当然除了验证驱动功能之外,我们还要编写业务代码和流程代码。这中间就和各行各业有关了,有的是算法,有…...

人工智能学习07--pytorch23--目标检测:Deformable-DETR训练自己的数据集
参考 https://blog.csdn.net/qq_44808827/article/details/125326909https://blog.csdn.net/dystsp/article/details/125949720?utm_mediumdistribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-0-125949720-blog-125326909.235^v38^pc_releva…...
Statefulset 实战 1
上一部分与大家分享到 Statefulset 与 RplicaSet 的区别,以及 Statefulset 的特点,能做的一些事情及一些注意事项 现在我们来尝试使用 Statefulset 来部署我们的应用,我们可以需要有应用程序,然后有持久化卷 开始使用 Statefuls…...

没有jodatime,rust怎么方便高效的操作时间呢?
关注我,学习Rust不迷路!! 当使用Rust进行日期操作时,可以使用 chrono 库。下面给出了二十个常见的日期操作的例子: 1. 获取当前日期和时间: use chrono::prelude::*;let current_datetime Local::now()…...
如何把pdf转成cad版本?这种转换方法非常简单
将PDF转换成CAD格式的优势在于,CAD格式通常是用于工程设计和绘图的标准格式。这种格式的文件可以在计算机上进行编辑和修改,而不需要纸质副本。此外,CAD文件通常可以与其他CAD软件进行交互,从而使得工程设计和绘图过程更加高效和精…...

内存池配置错误导致交易丢包?金融C++工程师必须掌握的7个硬核校验点,今天不看明天宕机
第一章:内存池配置错误为何引发金融交易丢包? 在高频金融交易系统中,内存池(Memory Pool)被广泛用于规避动态内存分配带来的延迟抖动与GC停顿。然而,当内存池预分配大小或对象复用策略配置失当时࿰…...

如何在React项目中实现Google Maps地点搜索:SearchBox与StandaloneSearchBox组件完全指南
如何在React项目中实现Google Maps地点搜索:SearchBox与StandaloneSearchBox组件完全指南 【免费下载链接】react-google-maps React.js Google Maps integration component 项目地址: https://gitcode.com/gh_mirrors/re/react-google-maps 想要为你的React…...

运用AIBIYE的智能改写工具,掌握五大实用技巧,有效降低论文重复率至合规范围。
嘿,大家好!我是AI菌。今天咱们来聊聊一个让无数学生头疼的问题:论文重复率飙到30%以上怎么办?别慌,我这就分享5个实用降重技巧,帮你一次搞定,轻松压到合格线以下。这些方法都是我亲身试验过的&a…...

Solving Matplotlib‘s Font Fallback: From DejaVu Sans to SimHei for CJK Support
1. 为什么Matplotlib会显示DejaVu Sans字体警告? 当你第一次在Matplotlib中尝试绘制包含中文的图表时,大概率会遇到这个熟悉的警告:"UserWarning: Glyph XXXX missing from font(s) DejaVu Sans"。这个看似简单的提示背后ÿ…...
)
进程同步与互斥——理发师问题多线程优化实践(sleeping barber problem)
1. 理发师问题:从生活场景到多线程模型 想象一下周末去理发店的场景:推门进去发现理发师正在给一位顾客剪头发,旁边有5把等待椅。如果椅子都空着,你可以直接坐下等待;如果已经坐了5个人,你可能选择改天再来…...

超维USV-M1000无人船实战:手把手教你搞定元生RTK、元厚测深仪与QGC地面站联调
超维USV-M1000无人船多设备联调实战:从RTK配置到QGC地面站深度整合 当超维USV-M1000无人船从包装箱中取出时,摆在工程师面前的从来不是一台即插即用的设备,而是一个需要精密调校的测绘系统集成平台。这款专为水域测绘设计的无人船,…...

Spyglass实战指南:从约束到违例豁免的CDC/RDC检查全流程
1. Spyglass入门:CDC/RDC检查基础 第一次接触Spyglass时,我被它复杂的规则体系搞得晕头转向。直到在项目中真正用它解决了几个棘手的跨时钟域问题,才明白这个工具的价值。简单来说,Spyglass就像个经验丰富的"电路医生"&…...
)
回归分析中的t检验、F检验和相关系数检验:如何选择与解读(附Python代码示例)
回归分析中的t检验、F检验和相关系数检验:如何选择与解读(附Python代码示例) 在数据分析的实际工作中,回归分析是最基础也最强大的工具之一。无论是预测销售额、分析用户行为,还是评估营销效果,回归模型都能…...

用快马AI快速原型你的技能组合:一键生成个人技能展示页
今天想和大家分享一个快速验证技能组合的小技巧——用InsCode(快马)平台一键生成个人技能展示页。作为开发者,我们经常需要向团队或客户展示自己的技术栈,但手动写前端页面太耗时。最近发现用AI生成原型特别高效,整个过程不到10分钟就能获得可…...

基于hadoop+spark+hive的高校科研项目管理系统的设计与实现
前言在高校科研项目管理领域,传统管理方式逐渐显露出诸多问题,亟待更为有效的解决方案。本研究聚焦于此,尝试借助 Python、Django、Vue 以及 MySQL 等技术,探索设计并实现一款高校科研项目管理系统。 研究过程中,运用文…...