无人驾驶实战-第五课(动态环境感知与3D检测算法)
机械式Lidar:TOF、N个独立激光单元、旋转产生360度视场MEMS式Lidar:不旋转
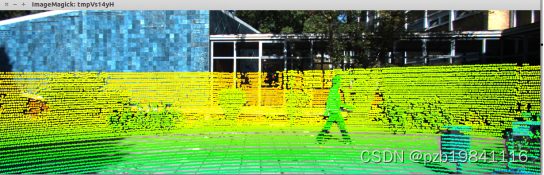
简单:x y z i (i为信号强度)稀疏:7%(相同场景范围,与图像数据相比的结果)无序:N!(角度不同、震动、扫描顺序不同 )精确:+-2cm

点云:简单精确适合几何感知图像:丰富多变适合语义感知
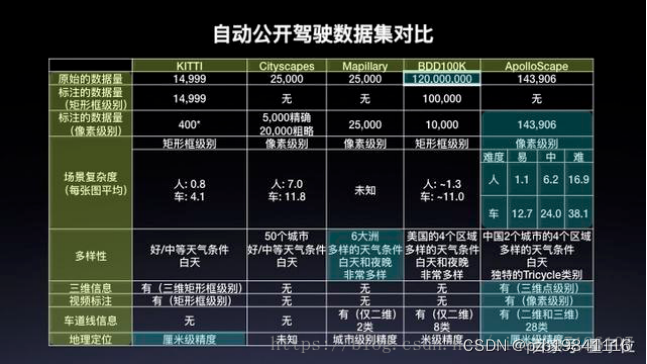
CAD模型:一般分类问题的数据集是CAD (虚拟生成)LiDAR传感器RGBD相机(结构光、双目相机)

基于点云的目标检测:分割地面->点云聚类->特征提取->分类地面分割依赖于人为设计的特征和规则,如设置一些阈值、表面法线等,泛化能力差多阶段的处理流程意味着可能产生复合型错误——聚类和分类并没有建立在一定的上下文基础上,目标周围的环境信息缺失这类方法对于单帧激光雷达扫描的计算时间和精度是不稳定的,这和自动驾驶场景下的安全性要求(稳定,小方差)相悖
非结构化数据,只是一堆点XYZI,没有网格之类的组织结构无序性:相同的点云可以由多个完全不同的矩阵表示(只是点的摆放顺序不同而已)数量变化大:图像中像素数量是常数,点云的数量可能会有很大(例如:不同线的激光雷达)表现形式变化大:一辆车向左转,同一辆车向右转,会有不同的点云代表同一辆车缺少数据:没有图片数据多,扫描时通常被遮挡部分数据丢失,数据稀疏
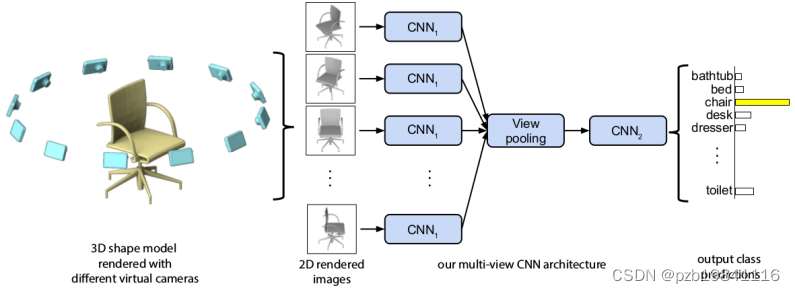
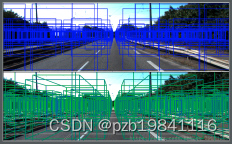
3D->2D,三维点云在不同角度的相机投影(映射)再借助2D图像处理领域成熟的深度学习框架进行分析典型算法: MVCNN、MV3D、AVOD、 Appllo2.0、SqueezeSeg
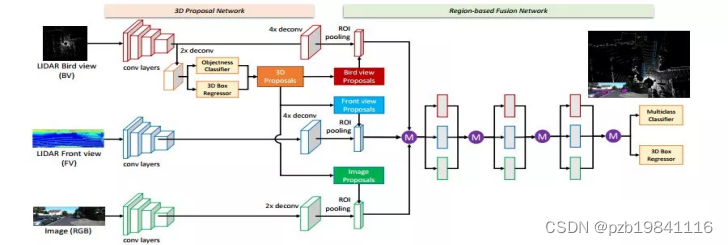
输入:BV+FV+RGB: 并非简单投影,而是提取高度/密度/强度/距离等特征作为像素值ROI:在BV训练一个3D RPN,分别向3种视图映射得到3种 ROI,并融合缺点:该方法在检测诸如行人和骑车人等小物体方面滞后(因为他们在BEV中特征本来就少又加上多次降采样),并且不能容易地适应具有垂直方向上的多个物体的场景(只用了BV)
输入:BEV+RGB 从[-40, 40]×[0, 70]×[0, 2.5]范围内点云数据生成6-channel BEV map,分辨率为0.1m, 700x800x6Z轴上[0,2.5]平分5段,前五个通道是每个栅格单元的最大高度, 第六个通道是每个单元中的密度信息



俯视投影到地面网格(2D grid-map)每个网格计算8个统计量使用UNet做障碍物分割




优点:速度快缺点:分割的精度仍然偏低 需要大量的训练集,而语义分割数据集标注困难改进版:SqueezeSegV2
优点:表示方式规整,可以将卷积池化等神经网络运算迁移到三维缺点:体素表达的数据量大(计算量很大 例如256x256x256 = 16777216),一般会减小分辨率(引入量化误差/局限性 例如64x64x64)
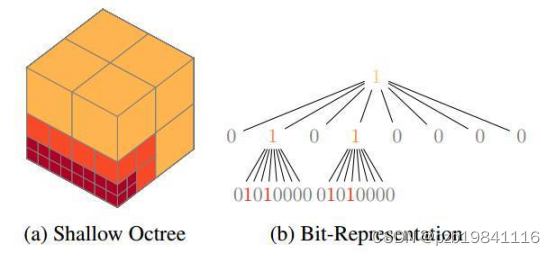
优点:与体素相比是更高效的点云结构化方法 (该粗的粗该细的细)缺点:仍然需要额外步骤对数据进行处理(类似体素化) 所以在端到端处理方面存在劣势
无序性:点云本质上是一堆点(nx3矩阵,其中n是点数) 点的顺序不影响它在空间中对整体形状的表示(相同的点云可以由两个完全不同的矩阵表示) 。希望不同的点云顺序可以得到相同的特征提取结果,可以用对称函数g (例如maxpooling或sumpooling)。旋转/平移性: 相同的点云在空间中经过一定的刚性变化(旋转或平移)坐标发生变化,希望不论点云在怎样的坐标系下呈现网络都能正确的识别出, 可以通过STN(spacial transform network)解决。
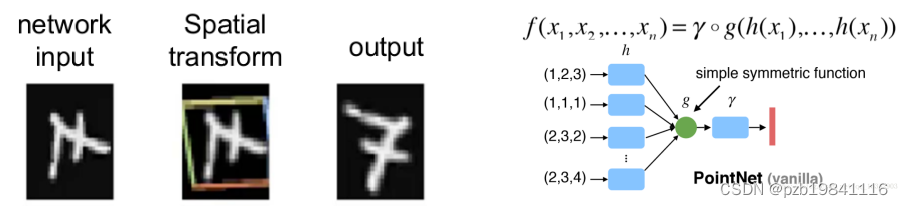

PointNet:单个点云特征 -> 全局特征,中间缺少局部信息(相当于用很大的卷积核/pooling只做了一层卷积/pooling 感受野一下就变最大) 单个PointNet操作可以看做一种特殊的卷积操作PointNet++:单个点云特征 -> 局部点云特征 -> 更大局部点云特征-> ... ->全局信息。PointNet的分层版本(相当于多次卷积 感受野逐渐变大)

采样:选取一些比较重要的点作为每一个局部区域的中心点分组:在这些中心点的周围选取k个近邻点(欧式距离给定半径内)PointNet: 使用PointNet提取局部特征(一次PointNet相当于一次卷积,故而称作PointNet卷积), 点云子集的特征结果输出到下一个set abstraction重复这个过程

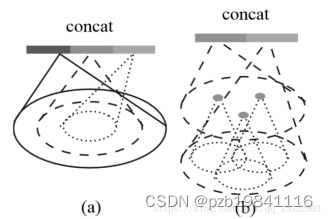
多尺度分组:在每一个分组层都通过多个尺度来确定每一个中心点的邻域范围,并经过PointNet提取特征后将多个特征拼接起来,得到一个多尺度融合的新特征多分辨率分组:多分辨率分组法是考虑多种分辨率的融合。左边特征向量是通过一个set abstraction得到的(多次PointNet卷积),右边特征向量是直接对当前patch中所有点进行Pointnet卷积得到。并且当点云密度不均时可以通过判断当前patch的密度对左右两个特征向量给予不同权重,以此达到减少计算量的同时解决密度问题
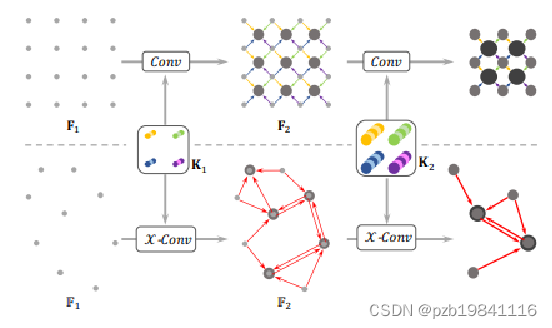
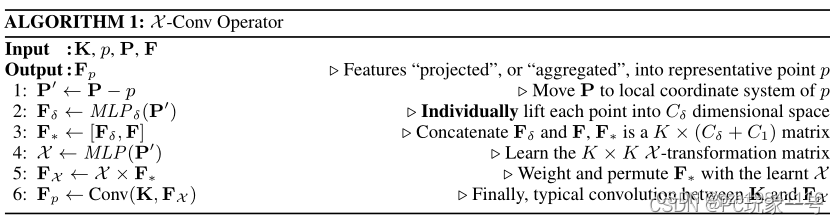
PointNet:点云分别提取特征(顺序无关) -> 对称函数解决顺序问题(maxpooling) “处处小心顺序问题”PointCNN:点云领域提取特征(顺序相关) -> 用X变换解决顺序问题 “前期放开干/后期统一变”

Pixel-Based: 2D-gridVoxel-Based: 3D-gridTree-Based: Tree structPoint-Based: 对称函数 / X变换
输入:仅使用激光雷达数据特征学习网络卷积中间层网络区域提取网络(RPN)优缺点: 准确度很高, 但在TitanX GPU上只有4fps的低速度
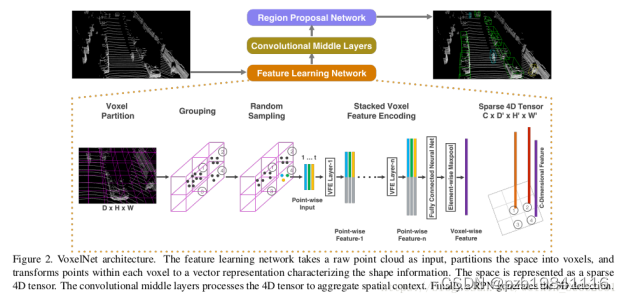
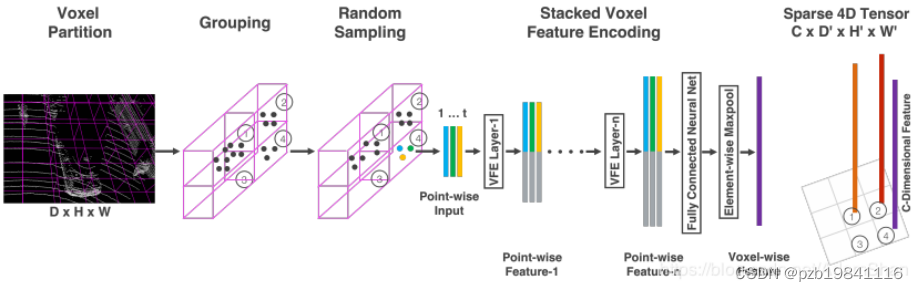
体素分块(Voxel Partition)输入点云(D,H,W) 体素的深高宽为(vD,vH,vW) voxel grid点云分组(Grouping)将点云按照上一步分出来的体素格进行分组随机采样(Random Sampling)每一个体素格随机采样固定数目的点T 因为a) 网格单元内点云数量不均衡 b) 且64线一次扫描点云数量巨大(10w)全部处理需要消耗很多cpu和内存
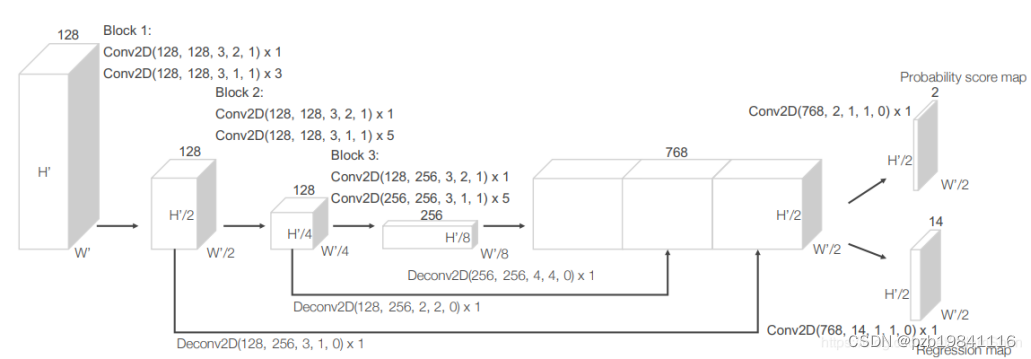
三个全卷积层块(Block)每次尺度减半每一个块的输出都上采样到相同尺寸进行串联得到高分辨率特征图输出: Probability Score Map (二分类 例如是否为车) [None, 200/100, 176/120, 2] 和Regression Map(位置修正) [None, 200/100, 176/120, 14]
相关文章:
无人驾驶实战-第五课(动态环境感知与3D检测算法)
激光雷达的分类: 机械式Lidar:TOF、N个独立激光单元、旋转产生360度视场 MEMS式Lidar:不旋转 激光雷达的输出是点云,点云数据特点: 简单:x y z i (i为信号强度) 稀疏:7%&…...

Tomcat 的内存配置
修改 Tomcat 的内存配置,你需要调整 Tomcat 的 Java 虚拟机(JVM)参数。具体来说,你需要修改 catalina.sh(Linux/macOS)或 catalina.bat(Windows)脚本中的 JAVA_OPTS 变量。以下是一般…...
pycharm出现python test运行报错(pytest模式)
pycharm出现python test运行报错 一、python test 执行代码报错二、删除运行配置三、修改pycharm默认配置为 unittests四、成功! 一、python test 执行代码报错 二、删除运行配置 三、修改pycharm默认配置为 unittests 四、成功!...

JavaScript篇 this指向
文章目录 1.this 关键字2.this实质3.使用场合3.1.全局环境3.2.构造函数3.3.对象的方法 4. 使用注意4.1.避免多层 this4.2.避免数组处理方法中的 this4.3.避免回调函数中的 this 5.绑定this5.1.Function.prototype.call()5.2.Function.prototype.apply()5.3.Function.prototype.…...

操作系统复习总结1
操作系统复习总结,仅供笔者复习使用,参考教材: 《操作系统原理》 - 何静媛编著. 西安电子科技大学出版社《操作系统考研复习指导》2024年 - 王道论坛组编. 电子工业出版社 本文主要内容为:计算机系统概述; 计算机系…...
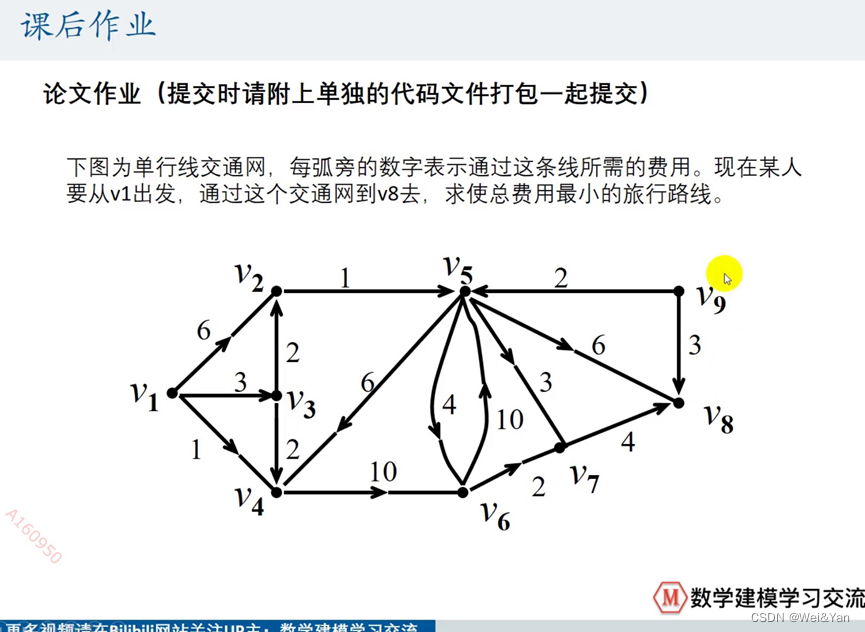
Matlab中图的最短路径
前言: 图的基本概念: 若想简单绘制图可以利用此网站: 左上角Undirected/Directed是无向图/有向图 左边 0-index ,1-index为0下标,1下标。 Node Count为节点个数 Graph Data:最初尾节点的名称ÿ…...

没有jodatime,rust里怎么将字符串转为日期呢?
关注我,学习Rust不迷路!! 在 Rust 中,有多种方法可以在时间和字符串之间进行转换。以下是五种常见的方式: 1. 使用 chrono 库进行转换: use chrono::{NaiveDateTime, DateTime, Utc, TimeZone};fn main(…...
【Markdown入门及使用】
这里写自定义目录标题 欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants 创建一个自定义列表如何创建一个…...

大数据面试题:HBase的读写缓存
面试题来源: 《大数据面试题 V4.0》 大数据面试题V3.0,523道题,679页,46w字 参考答案: HBase上RegionServer的cache主要分为两个部分:MemStore & BlockCache。 MemStore是写缓存,Block…...
springboot基于vue的高校迎新系统的设计与实现8jf9e
随着时代的发展,人们的生活方式得到巨大的改变,从而慢慢地产生了大量高校迎新信息,高校迎新信息需要一个现代化的管理系统,进行高校迎新信息的管理。 高校迎新系统的开发就是为了解决高校迎新管理的问题,系统开发是基于…...
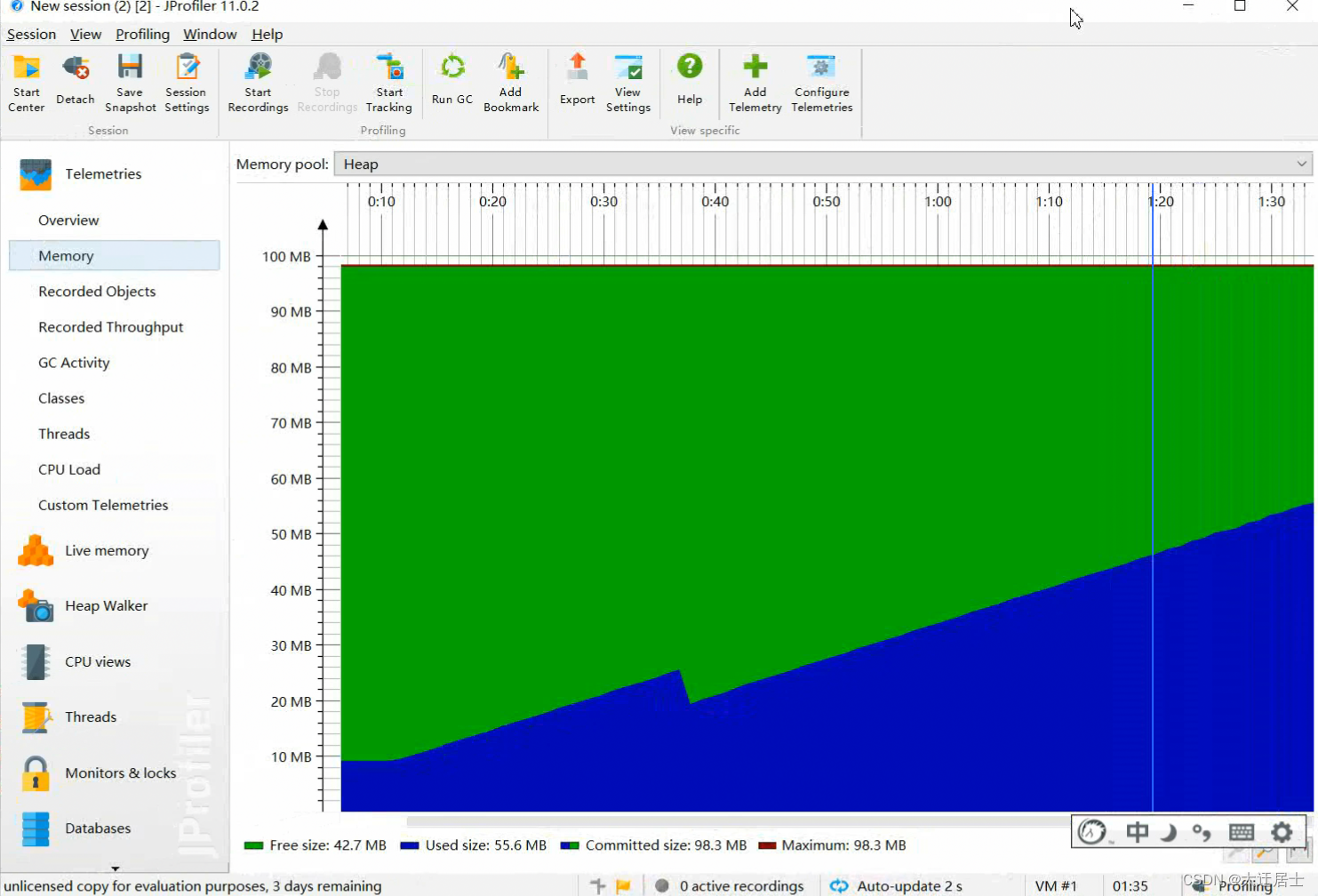
JVM入门到精通
一、JVM概念 1.1、什么是JVM Java Virtual Machine:Java虚拟机,用来保证Java语言跨平台 Java虚拟机可以看做是一台抽象的计算机,如同真实的计算机那样,它有自己的指令集以及各种运行时内存区域 Java虚拟机与Java语言并没有必然…...

Hive执行引擎的区别
执行引擎 Tez、Spark 和 MapReduce 都是用于在大数据处理中执行任务的框架或引擎,它们在性能、优化、适用场景等方面有一些区别。 MapReduce: MapReduce 是 Hadoop 最早引入的批处理计算模型,它将任务分成 Map 和 Reduce 两个阶段,…...
)
分布式 - 服务器Nginx:常见问题总结(二)
文章目录 01. Nginx 虚拟主机怎么配置?02. Nginx location 指令的作用?03. Nginx location 指令如何与其他指令一起使用?04. Nginx root 命令的作用?05. Nginx if 模块的作用?06. Nginx include 指令的作用?07. Nginx…...

【Paper Reading】CenterNet:Keypoint Triplets for Object Detection
背景 首先是借鉴Corner Net 表述了一下基于Anchor方法的不足: anchor的大小/比例需要人工来确认anchor并没有完全和gt的bbox对齐,不利于分类任务。 但是CornerNet也有自己的缺点 CornerNet 只预测了top-left和bottom-right 两个点,并没有…...
)
【BASH】回顾与知识点梳理(三)
【BASH】回顾与知识点梳理 三 三. 命令别名与历史命令3.1 命令别名设定: alias, unalias3.2 历史命令:history同一账号同时多次登入的 history 写入问题无法记录时间 该系列目录 --> 【BASH】回顾与知识点梳理(目录) 三. 命令…...

C#设计模式之---单例模式
单例模式(Singleton) 单例模式,属于创建类型的一种常用的软件设计模式。通过单例模式的方法创建的类在当前进程中只有一个实例。 1)普通单例模式 using System; namespace SingletonPattern {/// /// 单例模式(非线程安全)/// …...
Git工具安装
Git 工具安装 1. 下载Git安装包2. 安装Git工具3. 简单的使用配置用户名 1. 下载Git安装包 打开官网 https://git-scm.com/downloads点击下载 2. 安装Git工具 右击以管理员身份运行 
深度学习——注意力机制、自注意力机制
什么是注意力机制? 1.注意力机制的概念: 我们在听到一句话的时候,会不自觉的捕获关键信息,这种能力叫做注意力。 比如:“我吃了100个包子” 有的人会注意“我”,有的人会注意“100个”。 那么对于机器来说…...

STM32入门学习之定时器中断
1.STM32的通用定时器是可编程预分频驱动的16位自动装载计数器。 STM32 的通用定时器可以被用于:测量输入信号的脉冲长度 ( 输入捕获 ) 或者产生输出波 形 ( 输出比较和 PWM) 等。 使用定时器预分频器和 RCC 时钟控制器预分频器,脉冲长度和波形 周…...

基本数据类型与包装数据类型的使用标准
Reference:《阿里巴巴Java开发手册》 【强制】所有的 POJO 类属性必须使用包装数据类型。【强制】RPC 方法的返回值和参数必须使用包装数据类型。【推荐】所有的局部变量使用基本数据类型。 比如我们如果自定义了一个Student类,其中有一个属性是成绩score,如果用Integer而不用…...

如何快速构建高质量平行语料库:Lingtrain Aligner智能文本对齐完全指南
如何快速构建高质量平行语料库:Lingtrain Aligner智能文本对齐完全指南 【免费下载链接】lingtrain-aligner Lingtrain Aligner — ML powered library for the accurate texts alignment. 项目地址: https://gitcode.com/gh_mirrors/li/lingtrain-aligner 平…...

Emacs实时语法检查优化:flymake-cursor插件实现光标悬停提示
1. 项目概述:Emacs 实时语法检查的得力助手如果你是一个 Emacs 用户,并且主要用它来写代码,那么你一定对“实时语法检查”这个功能不陌生。在编写代码时,能够即时看到潜在的错误、拼写问题或者代码风格警告,这能极大地…...

MATLAB找峰值进阶:用findpeaks函数5个鲜为人知的技巧,让你的科研图表更专业
MATLAB找峰值进阶:用findpeaks函数5个鲜为人知的技巧,让你的科研图表更专业 在科研数据分析中,峰值检测是最基础却又最关键的步骤之一。无论是光谱分析、色谱检测还是振动信号处理,准确识别和量化峰值特征直接影响着研究结论的可信…...

基于Vue3+TypeScript的ChatGPT风格前端界面集成实战
1. 项目概述与核心价值最近在折腾一个个人项目,想给一个静态网站加上智能对话的能力,让访客能随时问点问题。一开始想自己从零搭建,但考虑到前后端、AI接口、实时通信这些环节,工作量着实不小。后来在GitHub上逛的时候,…...
实现代码))
告别暴力枚举:用‘换根DP’思想5步拆解GDCPC L题‘启航者’(附O(n)实现代码)
从暴力枚举到换根DP:5步拆解树上路径极值问题 在算法竞赛中,树形结构上的动态规划(DP)问题一直是考察重点,而"换根DP"作为一种高效解决树上路径相关问题的技巧,能帮助我们将O(n)的暴力枚举优化到…...

新手避坑指南:用ROS Melodic在Ubuntu 18.04上为Dofbot机械臂配置MoveIt!
新手避坑指南:用ROS Melodic在Ubuntu 18.04上为Dofbot机械臂配置MoveIt! 第一次为Dofbot机械臂配置ROS Melodic和MoveIt时,很多新手会在环境搭建、依赖安装和配置文件调试等环节遇到各种"坑"。这些看似简单的问题往往耗费大量时间…...

Windows资源管理器STL缩略图革命:3D模型可视化管理的终极解决方案
Windows资源管理器STL缩略图革命:3D模型可视化管理的终极解决方案 【免费下载链接】STL-thumbnail Shellextension for Windows File Explorer to show STL thumbnails 项目地址: https://gitcode.com/gh_mirrors/st/STL-thumbnail 还在为海量STL文件的管理而…...

告别单调终端:250+ Xshell配色方案让你的命令行焕然一新
告别单调终端:250 Xshell配色方案让你的命令行焕然一新 【免费下载链接】Xshell-ColorScheme 250 Xshell Color Schemes 项目地址: https://gitcode.com/gh_mirrors/xs/Xshell-ColorScheme 每天面对单调的黑白终端界面,是否感到视觉疲劳ÿ…...

Taotoken多模型聚合平台在智能客服场景下的应用实践
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken多模型聚合平台在智能客服场景下的应用实践 对于智能客服系统的开发者而言,对话质量与成本控制是两大核心关切…...
)
手把手教你用kafka-storage.sh修复Kafka KRaft模式启动报错(附UUID生成与格式化全流程)
手把手教你用kafka-storage.sh修复Kafka KRaft模式启动报错(附UUID生成与格式化全流程) 当Kafka集群从ZooKeeper模式迁移到KRaft模式时,技术人员常会遇到因元数据问题导致的启动失败。本文将深入解析kafka-storage.sh工具的核心功能ÿ…...