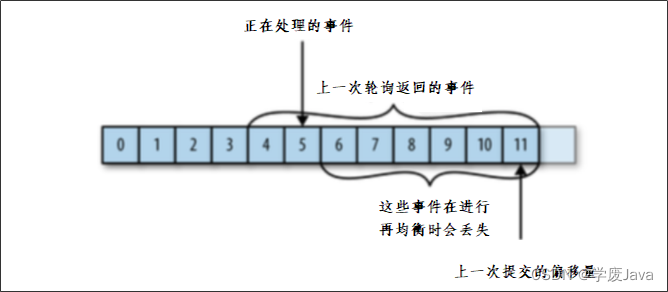
CubeSLAM: Monocular 3D Object SLAM——论文简述
一、简介
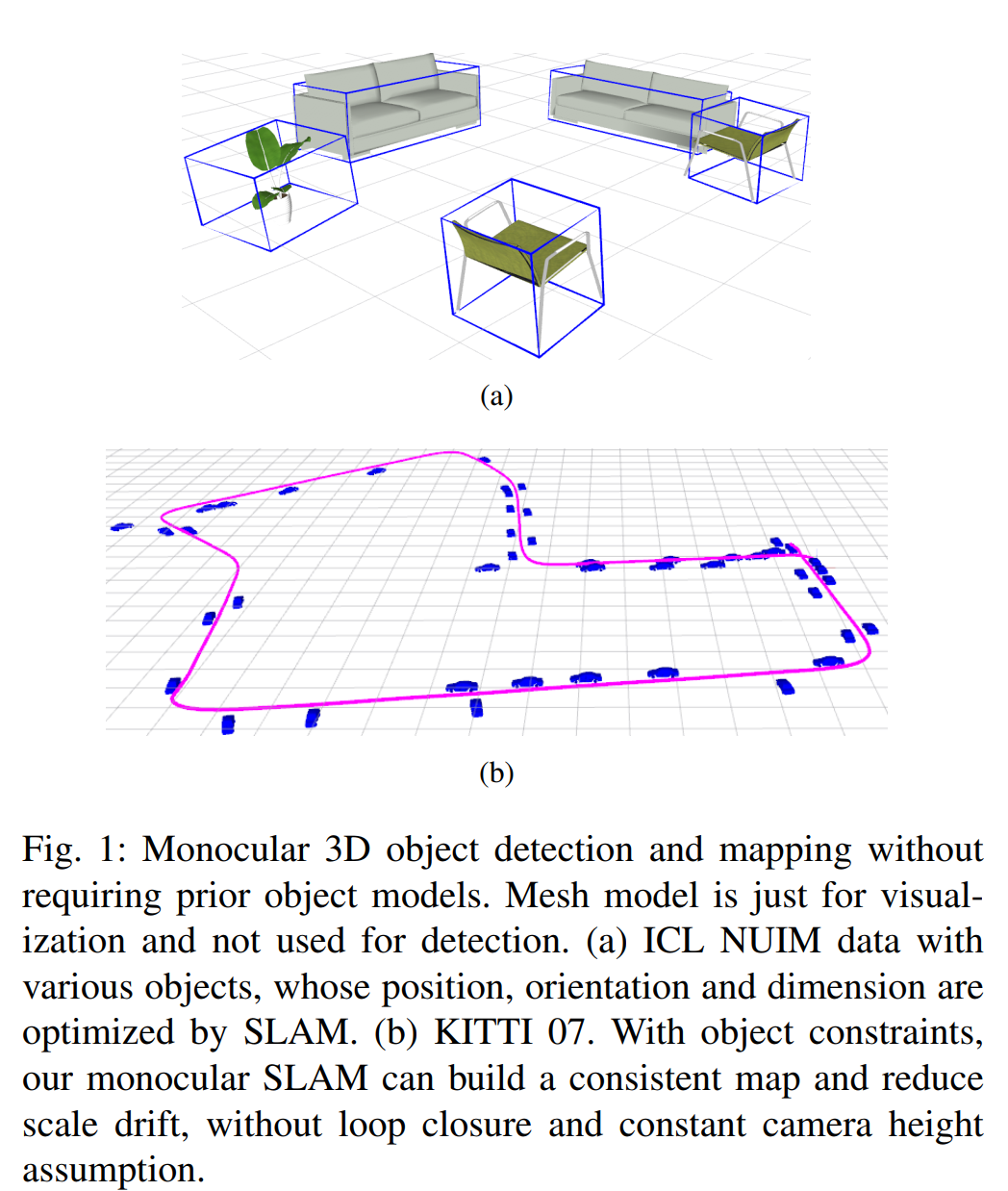
提出一种在动态和静态环境中同时进行3D目标检测和定位建图的方法,并且能够互相提升准确度。具体地,对于3D目标,其位置、方向和尺寸通过slam进行了优化;而3D目标作为slam中的路标,可以提供额外的语义和几何约束,从而提升相机位姿估计并减少尺度漂移,且无需回环检测和假设相机的高度不变。
二、Single Image 3D Object Detection
3D box proposal generation
作者利用2D的bbox来生成3D的proposal,而非直接采样。对于一个3D的cuboid,用九个自由度进行表示:R、t以及长宽高(dx,dy,dz),其本身的坐标轴建立在中心位置。而2D的bbox只能提供四条边4个约束,这显然是不够的,因此需要用到物体尺寸和方向等其他信息。
本文没有依赖预测得到的长宽高来减少回归参数,而是采用vanishing point(在两个平行的线条中,两个线条会消失在远方的一点)。对于一个3D的cuboid,可以在xyz轴方向上形成3个VP。

其中K代表相机内参,R代表相对于相机坐标的旋转矩阵,col(i)代表R的第i列。
接下来需要基于得到的VP来获取3D cuboid的8个2D坐标。
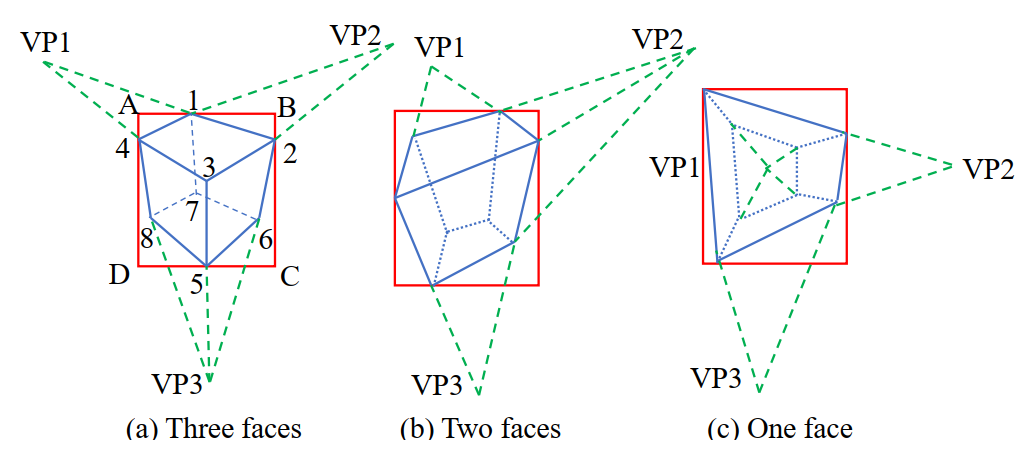
如上所示,我们已经得到了估计的3个VP,仅需估计一个2D点,就可以通过两直线的交点,求出剩余的2D点。
求解3D物体的位姿时,需要区分两种情况:任意姿态物体和地面物体。
对于任意姿态物体,采用 PnP 来求解3D cuboid的位置和尺寸,但由于单目视觉的尺度不确定性,需要确定一个scale。在3D cuboid坐标系下,8个3D点可以表示为[±dx, ±dy, ±dz] / 2,从而3D到2D的投影关系为

其中π是相机投影函数。这里选择如2、3、4、5这样相邻关系的4个点,每个点提供2个约束,加上提前确定的scale,即可估计3D cuboid的位姿。
对于地面物体,在地平面上建立世界坐标系,那么物体的滚动角和俯仰角均为零,且scale由投影过程中的摄像机高度决定。我们可以直接将下方的2D点反向投影到三维地平面,然后计算其他3D角,形成一个3D cuboid。例如对于图(a)中的p5,用[n,m](相机坐标系下的法向量和距离)表示,其相应的3D点P5是反投影射线 K-1p5 与地平面的交点:

基于上述讨论,求3D物体的proposal转变为求3个VP及1个2D点。VP是由R决定的,可以通过大量的数据训练来直接预测,但本文选择手动采样,然后对它们进行评分排序,以达到普适性的目的。
对于任意姿态物体,需要对整个R进行采样,但对于地面物体,使用相机的滚动角/俯仰角(在数据集SUN RGBD和KITTI中已经提供)和物体的偏航角来计算R。对于视频数据,我们使用slam来估计相机的位姿。因此,采样空间大大缩小。在本文的实验中,只考虑地面物体。
Proposal scoring
代价函数如下:

其中I代表图像,O代表3D cuboid的9个自由度R、t、d,w1和w2是权重参数,在对小样本数据集进行手动搜索后,设定 w1 = 0.8,w2 = 1.5。本文将损失分为三种:
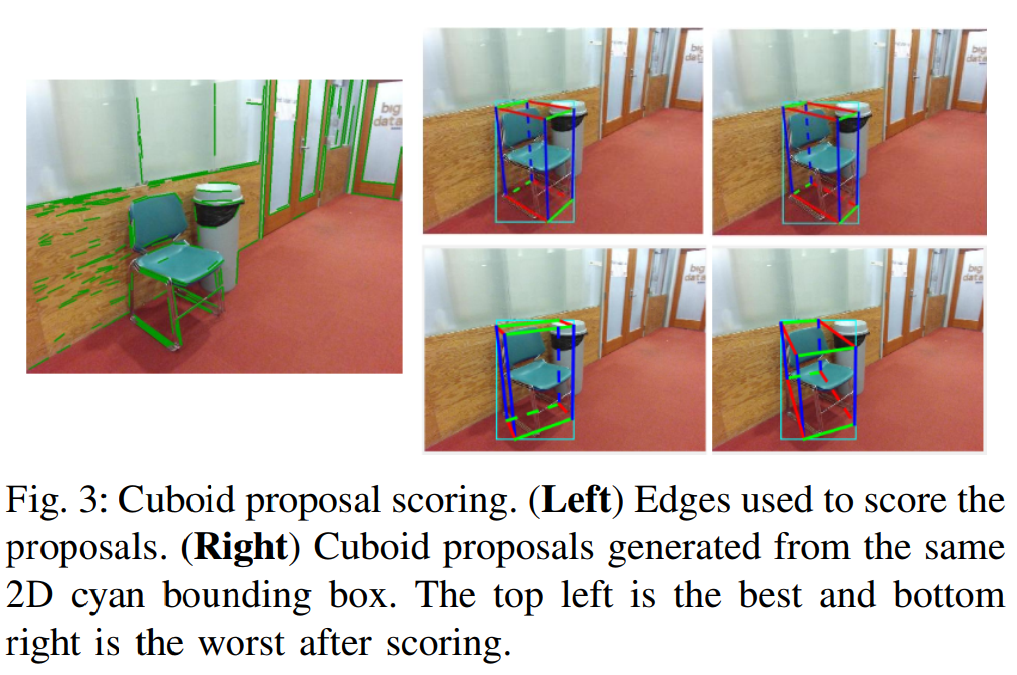
Distance error:2D cuboid的边缘应与实际图像边缘相匹配。首先进行Canny边缘检测,及距离变换。然后对于每个可见的立方体边缘,对其上的10个点进行均匀采样,并将所有距离值除以2D box的对角线,原理与倒角距离类似。
Angle alignment error:Distance error对物体表面纹理等假阳性边缘非常敏感。因此,我们还用LSD检测长线段(如图 3 中的绿线所示),并测量其角度是否与VP一致。首先根据点-线关系,将这些线段与1个VP相关联。然后,对于每个VP,可以找到斜率最小和最大的两条线段,<a, b>表示具有两个端点a、b的直线的角度。

Shape error:前两个代价可以在2D图像空间中有效评估。为了生成更准确的3D proposal,惩罚具有较大长宽比的立方体。我们还可以应用更严格的先验,例如特定类型物体的估计尺寸或固定尺寸。

其中s代表最大长宽比,σ在实验中设置为1。
三、OBJECT SLAM
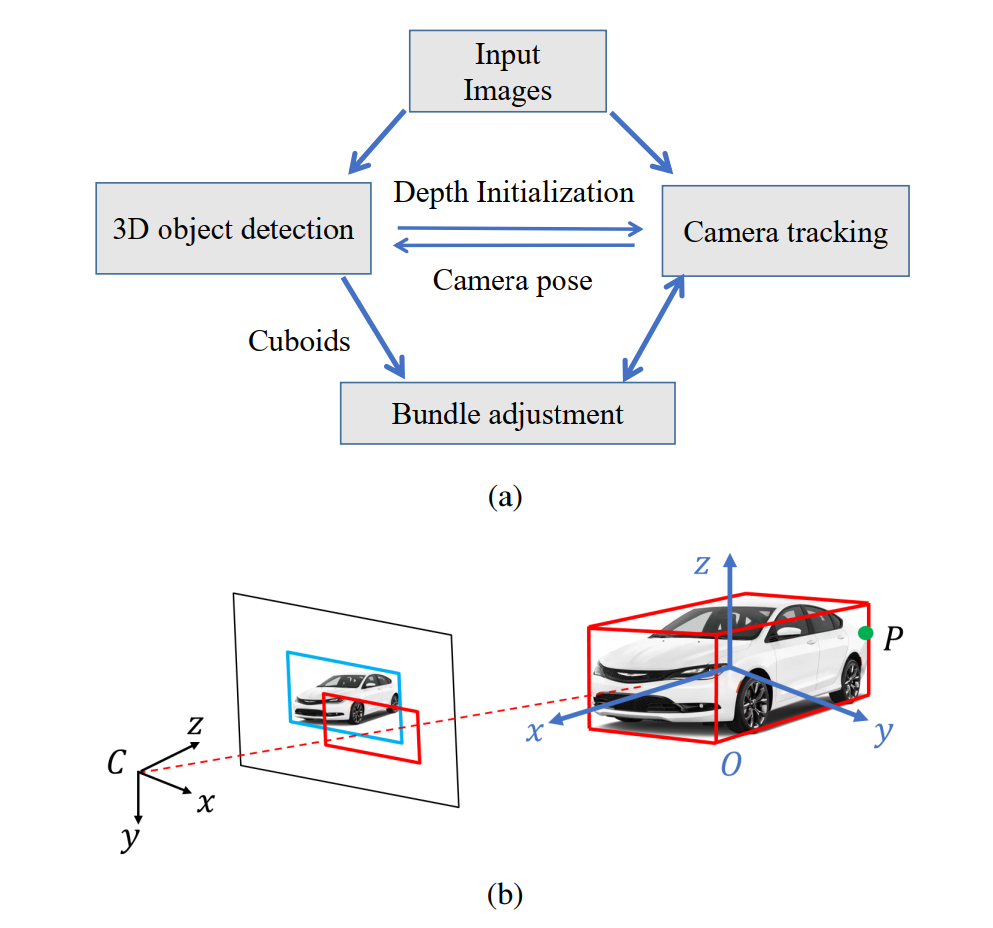
将单图像3D目标检测扩展到多视角object slam,以共同优化物体和相机位姿。该系统使用基于特征点的ORB SLAM2。需要使得BA共同优化目标、路标特征点和相机位姿。
Bundle Adjustment Formulation
BA可以表示为一个非线性最小二乘问题,为了改善鲁棒性,使用 Huber核函数:

其中C、O、P分别代表相机位姿、3D cuboid和路标点,Σ是不同误差测量值的协方差矩阵。可以使用GN或LM来解决优化问题。GN属于线搜索方法,先找到方向,再确定长度,HΔx=g;LM属于信赖区域方法(Trust Region),认为近似只在区域内可靠,(H+λI)Δx=g,相比于GN,能够保证增量方程的正定性,即认为近似只在一定范围内成立,如果近似不好则缩小范围,从增量方程上来看,可以看成一阶和二阶的混合,参数λ控制着两边的权重。
Measurement Errors
Camera-Object measurement:需要分为3D和2D。
对于3D,在三维物体检测准确的情况下使用。3D物体位姿可以表示为[Tom d]。为了计算3D物体的测量误差,将其转换到相机坐标系:

om:object measurement, log将SE3的误差映射到6DOF的切向量空间,所以e是9维的。
如果没有物体的先验模型,我们基于图像的cuboid检测就无法区分物体的正面或背面。例如,我们可以通过将物体坐标系旋转90度并交换长度和宽度值来表示相同的长方体。因此,我们需要沿高度方向旋转 0,±90,180,以找到最小误差。
对于2D,将路标投影到图像平面上来获得2D的bbox,然后与检测的bbox比较。简单来说,就是将8个角点投影到平面内,寻找最小和最大的投影像素x,y坐标来建立一个矩形框:
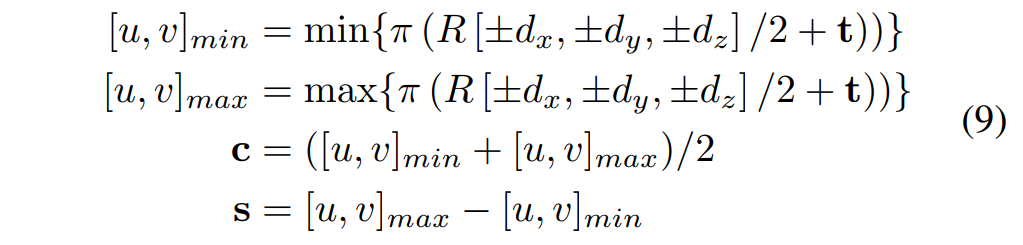
其中c是2D bbox的中心坐标,s是大小。所以可以得到2D下的co误差:

由于检测过程复杂,与点相比,误差协方差 Σ 或hessian矩阵 W 的建模和估计并不简单。 因此,我们简单地赋予几何接近对象更多的权重。假设cuboid-camera距离为 d,物体的 2D 检测概率为 p,那么我们可以在 KITTI 数据上定义 w = p × max(70 − d,0) / 50,其中 70m 是截断距离。 参数可能因不同的数据集而异。
Object-point measurement:两者之间可以互相提供约束,如果点 P 属于3D物体的对象,则它应该位于 3D cuboid内部。 因此,我们首先将点变换到3D cuboid坐标系,然后与cuboid尺寸进行比较,得到三维误差:

Camera-point measurement:

zm 是 3D 点 P 的像素坐标。
Data association
跨帧数据关联是slam的另一个重要部分。与特征点匹配相比,物体关联似乎更容易,因为包含了更多的纹理,可以使用许多二维物体跟踪或模板匹配方法。 在一些简单的场景中,甚至二维方框重叠也可以work。 但是,如果存在严重的物体遮挡和重复物体,这些方法就不稳健了。此外,在目前的slam优化中,需要检测并移除动态物体,但标准的物体跟踪方法无法分类是否静态,除非使用特定的运动分割方法。
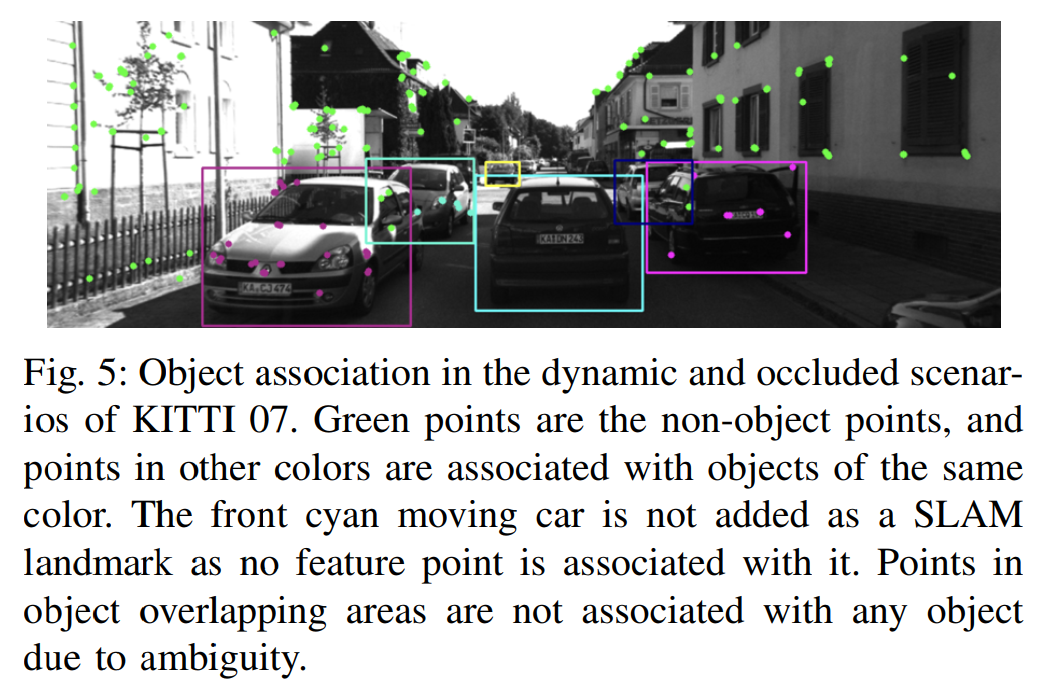
作者提出了另一种基于特征点匹配的物体关联方法。对于许多基于特征点的slam方法,不同视图中的特征点可以通过描述子匹配和对极几何检查进行有效匹配。因此,我们首先将特征点与对应的物体关联起来,条件是至少有两帧图像在二维物体边界框中观察到了特征点,且特征点与立方体中心的三维距离小于 1 米。
在公式 11 中计算 BA 过程中的对象点测量误差时,也会用到这种对象点关联。
如果不同帧中的两个物体之间共享的特征点数量最多,并且超过了一定的阈值(论文中为 10 个),我们就会匹配这两个物体。属于移动物体的动态特征点会被丢弃,因为无法满足对极约束。因此,相关特征点较少的物体被视为动态物体。
四、DYNAMIC SLAM
提出了一种联合估计相机位姿和动态物体轨迹的方法。对物体做了一些假设,以减少未知参数的数量,使问题变得可解。
常用的两个假设是:物体是刚性的,并遵循某种物理上可行的运动模型。
刚体假设:一个点在其相关物体上的位置不会随时间改变。这样,我们就可以利用重投影误差来优化其位置。
运动模型:最简单的形式是匀速恒定运动模型。对于某些特定物体(如车辆),还需要遵循nonholonomic wheel model(没有侧滑)。
使用“动态点”来指代与运动物体相关的特征点。对于运动物体 Oi 上的动态点 Pk,我们用 iPk 表示其在物体上的锚定位置,该位置基于刚性假设是固定的。其世界坐标系下的位姿会随时间变化,不适合slam优化。
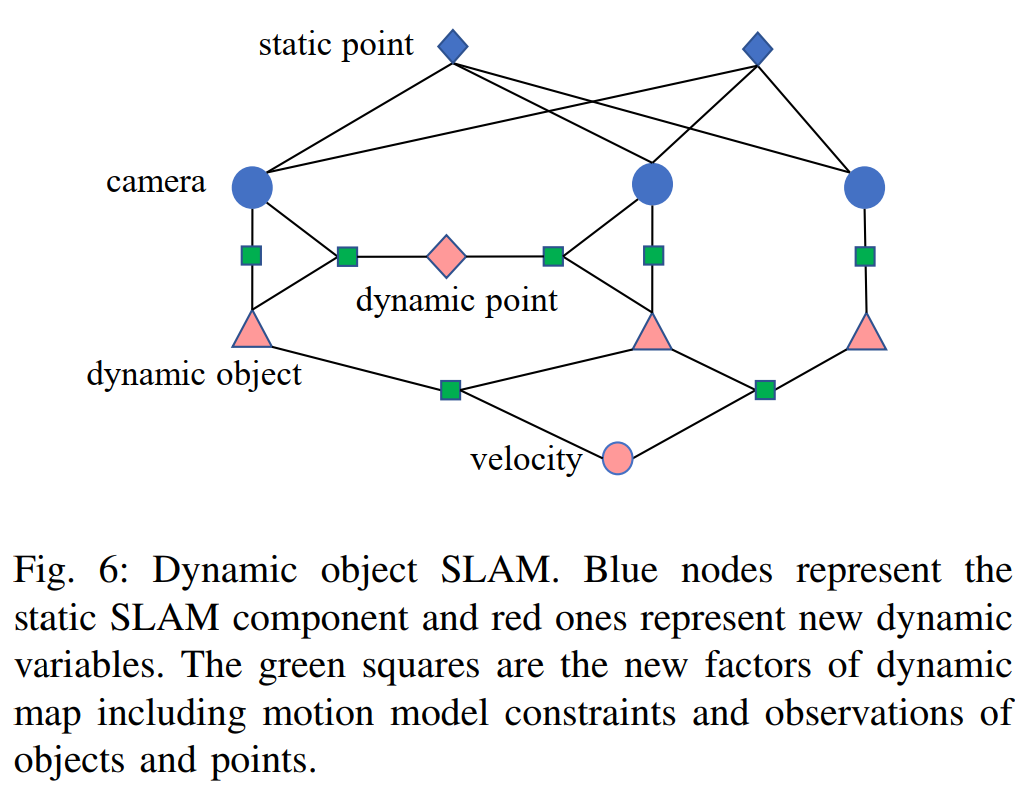
如上图所示,绿色节点代表误差中的各项约束。有了这些因子,相机的位姿也可以通过动态元素来约束。
Object motion model:物体运动可以用变换矩阵T来表示。我们可以将T应用于之前的位姿,然后计算当前位姿误差。在这里,我们采用了nonholonomic wheel model,汽车运动由速度v和转向角Φ表示,根据先验假设,其变换矩阵为:

状态转移可以表示为:

其中 L 为前后车轮中心之间的距离。请注意,该模型要求 x、y、θ 定义在后轮中心,而我们的目标坐标系定义在车辆中心。这两个坐标系有 L/2 的偏移。最终的运动模型误差:

Dynamic point observation:动态点是锚定在相关物体上的,因此首先要将其转换到世界坐标系,然后再投射到相机坐标系上。假设第 k 个点在第 i 个物体上的位置为 iPk,而第 j 幅图像中的物体位姿为jToi,则该点的重投影误差为:

在数据关联方面,上节中针对静态环境的关联方法并不适用于动态情况,原因是难以匹配动态点特征。跟踪特征点的典型方法是描述子匹配,然后检查对极约束。然而,对于单目动态情况,很难准确预测物体和点的移动。
所以通过二维 KLT 稀疏光流算法直接跟踪特征点,不需要三维点位置。
假设两帧图像的投影矩阵分别为 M1、M2。这两个帧中的三维点位置分别为 P1、P2,对应的像素分别为 z1、z2。两帧之间的物体移动变换矩阵为 ∆T,那么我们可以推断出 P2 = ∆TP1。根据投影规则,我们可以得出:

可以用 SVD 求解三角化。
当像素位移较大时,KLT 跟踪仍可能失败。因此,在动态目标跟踪中,直接使用视觉物体跟踪算法。首先跟踪物体的二维边界框,并根据上一帧预测其位置,然后将其与当前帧中重叠率最大的检测边界框进行匹配。
五、实验
2D目标检测方面,采用yolo检测室内场景,ms-cnn检测室外场景。
slam方面采用ORB SLAM2。
展望一下,使用object建立稠密图,更全面的场景理解等等。
相关文章:
CubeSLAM: Monocular 3D Object SLAM——论文简述
一、简介 提出一种在动态和静态环境中同时进行3D目标检测和定位建图的方法,并且能够互相提升准确度。具体地,对于3D目标,其位置、方向和尺寸通过slam进行了优化;而3D目标作为slam中的路标,可以提供额外的语义和几何约…...

【雕爷学编程】MicroPython动手做(30)——物联网之Blynk 2
知识点:什么是掌控板? 掌控板是一块普及STEAM创客教育、人工智能教育、机器人编程教育的开源智能硬件。它集成ESP-32高性能双核芯片,支持WiFi和蓝牙双模通信,可作为物联网节点,实现物联网应用。同时掌控板上集成了OLED…...

linux scp 拷贝文件到目标linux系统
scp -P 8866 -r jsonrpc/ root192.168.6.66:/folder_path...
Oracle-expdp报错ORA-39077、06502(Bug-16928674)
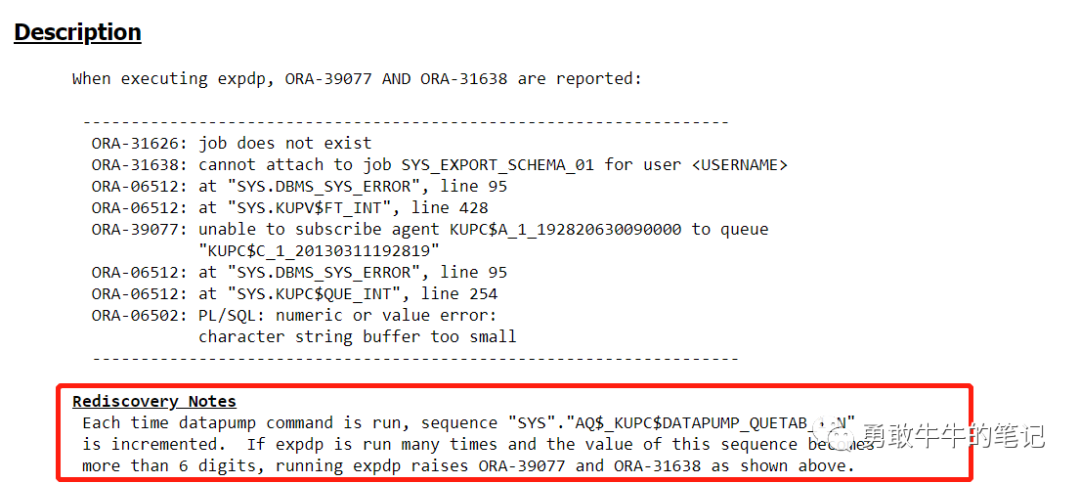
问题: 用户在使用expdp进程导出时,出现队列报错ORA-39077、ORA-06502 ORA-31626: job does not exist ORA-31638: cannot attach to job SYS_EXPORT_SCHEMA_01 for user SYS ORA-06512: at "SYS.DBMS_SYS_ERROR", line 95 ORA-06512: at "SYS.KUPV$…...
Kafka入门,保姆级教学
文章目录 Kafka概念消息中间件对比消息中间件对比-选择建议Kafka常用名词介绍Kafka入门1. Kafka安装配置2.Kafka生产者与消费者关系3.Kafka依赖4.生产者发消息5.消费者接受消息6.Kafka高可用性设计6.1集群Kafka备份机制(Reolication) 7.kafka生产者详解7.1 发送类型7.2参数详解…...
)
RabbitMQ 过期时间(TTL)
TTL,Time to Live的简称,即过期时间,RabbitMQ可以对消息和队列设置TTL。 RabbitMQ支持设置队列的过期时间和消息的过期时间。如果设置队列的过期时间则队列中所有的消息都有相同的过期时间。如果设置消息的过期时间则每条消息的过期时间则可以不同。如两…...

C 语言练习题、持续更新
文章目录 C语言练习题读懂每个练习题才是学好一门代码的重要经历目录(先不要看答案,首先自己做才能更好的领悟,做不来没关系)题目一:有 1、2、3、4 四个数字,能组成多少个互不相同且无重复数字的三位数&…...

Android Q以上后台启动Activity初步尝试
在Android Q以后 google不允许在后台service 广播等等启动Activity 具体请看google文档从后台启动 Activity 的限制 | Android 开发者 | Android Developers 文档里有详细的说明,在哪种情况下可以后台启动Activity。 大体分为以下几种情况: 1、应用具有可见窗口,例如前…...

【torchlars】windows下载github中的torchlars包遇到的问题及解决方案
环境 python3.7 windows10 cuda11.1 pytorch1.8.1 虚拟环境miniconda 目的 windows下载github中的torchlars包 遇到的问题 问题一:直接下载好文件夹输入指令:python setup.py install 出现错误:RuntimeError: Error compiling objects f…...

SolidUI社区-通用Prompt技巧
背景 随着文本生成图像的语言模型兴起,SolidUI想帮人们快速构建可视化工具,可视化内容包括2D,3D,3D场景,从而快速构三维数据演示场景。SolidUI 是一个创新的项目,旨在将自然语言处理(NLP)与计算机图形学相…...

C++中类的封装写出一个文件加密的小项目
文件的加密较为简单,当然也可以修改它的加密方式等,供大家参考 #include<string> #include<fstream> class ReaderFile { public:string Read(const string& filename){cout << "读取文件,获取明文"<<…...
【网络编程·传输层】UDP和TCP的报头
目录 一、端口号划分 二、部分指令 1、pidof(用于查看进程id) 2、netstat(查看网络状态) 三、UDP协议 1、UDP协议格式 2、UDP协议如何进行封装、解包、分用 2.1封装、解包 2.2分用 3、UDP协议的特点 3.1UDP协议的特点 …...

C语言编程技巧 全局变量在多个c文件中公用的方法
在使用C语言编写程序时,经常会遇到这样的情况:我们希望在头文件中定义一个全局变量,并将其包含在两个不同的C文件中,以便这个全局变量可以在这两个文件中共享。举个例子,假设项目文件夹"project"下有三个文件…...

【HDFS】NN处理全量块汇报时reportDiff的一些细节
NN处理全量块汇报(FBR)时的一些细节怎么生成的toRemove怎么check 汇报上来的块是不是corrupt的?reportDiff方法里巧妙地引入delimiterBlock这个block的作用前置知识:【HDFS】Block、BlockInfo、BlockInfoContiguous、BlockInfoStriped的分析记录 上面的文章中介绍了关于Bl…...
JVM之类加载与字节码(一)
1.类文件结构 一个简单的HelloWorld.Java package cn.itcast.jvm.t5; // HelloWorld 示例 public class HelloWorld { public static void main(String[] args) { System.out.println("hello world"); } }编译为 HelloWorld.class 后的样子如下所示: […...
【数据结构OJ题】合并两个有序数组
原题链接:https://leetcode.cn/problems/merge-sorted-array/ 目录 1. 题目描述 2. 思路分析 3. 代码实现 1. 题目描述 2. 思路分析 看到这道题,我们注意到nums1[ ]和nums2[ ]两个数组都是非递减的。所以我们很容易想到额外开一个数组tmp[ ]&#x…...
数据结构笔记--归并排序及其拓展题(小和问题、逆序对问题)
目录 1--归并排序 2--小和问题 3--逆序对问题 1--归并排序 归并排序的核心思想:将一个无序的序列归并排序为一个有序的系列;通过递归将无序的序列二分,从底层开始将二分的序列归并排序为有序序列; #include <iostream> #…...
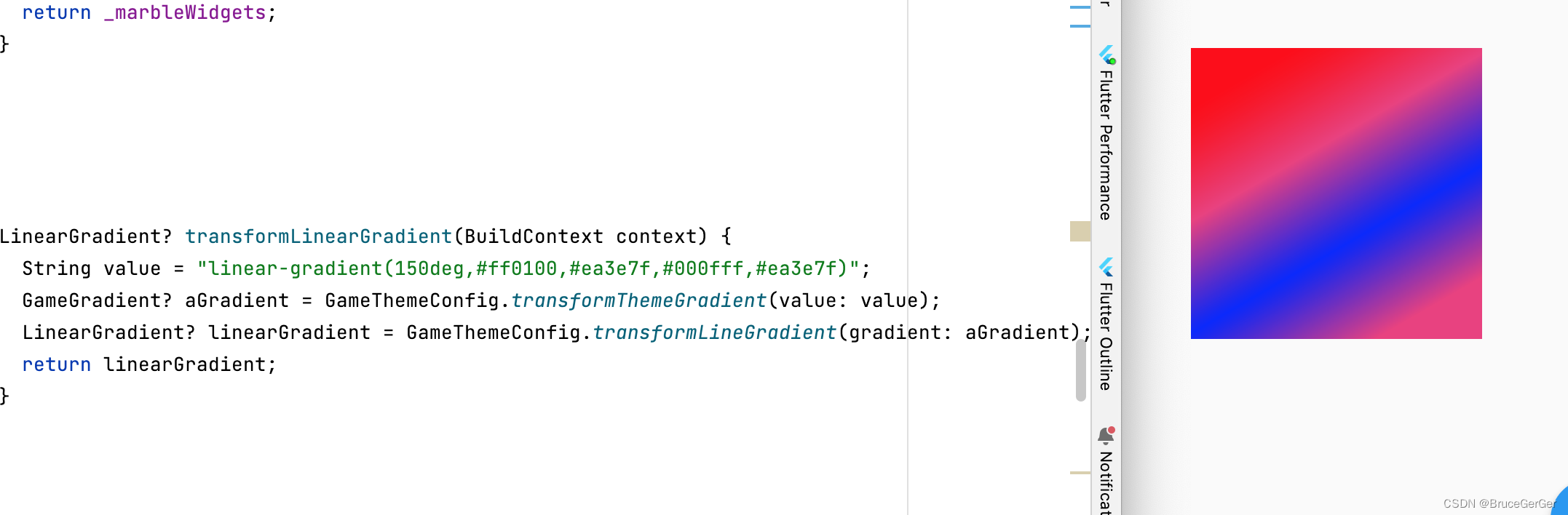
flutter开发实战-实现css线性渐变转换flutter渐变LinearGradient功能
flutter开发实战-实现css线性渐变转换flutter渐变LinearGradient功能 在之前项目开发中,遇到更换样式,由于从服务器端获取的样式均为css属性值,需要将其转换成flutter类对应的属性值。这里只处理线性渐变linear-gradient 比如渐变 “linear-…...

python推理小游戏bagels
python推理小游戏bagels bagels是一个推理小游戏,你的朋友想到一个随机的、没有重复的3位数字,你尝试去猜测它是什么。每次猜测之后,朋友就会给出3中类型的线索: Bagels: 你猜测的3个数都不在神秘数字中;Pico&#x…...

DBSCAN聚类
一、概述 DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类算法,簇集的划定完全由样本的聚集程度决定。聚集程度不足以构成簇落的那些样本视为噪声点,因此DBSCAN聚类的方式也可以用于异常点的检测。 二、算法…...

【论文阅读】GEN-1: Scaling Embodied Foundation Models to Mastery
快速了解部分 基础信息(英文): 1.题目: GEN-1: Scaling Embodied Foundation Models to Mastery 2.时间: 2026.04 3.机构: Generalist AI 4.3个英文关键词: GEN-1, Embodied Intelligence, VLA 1句话通俗总结本文干了什么事情 本文发布了新一…...

数字图像质量提升技术【附代码】
✨ 长期致力于图像质量提升、计算机图形处理器、并行加速、非均匀校正、图像超分辨、反射光消除、深度学习、生成对抗网络研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 &#…...

article-extractor项目架构解析:模块化设计与可扩展性指南
article-extractor项目架构解析:模块化设计与可扩展性指南 【免费下载链接】article-extractor To extract main article from given URL with Node.js 项目地址: https://gitcode.com/gh_mirrors/ar/article-extractor article-extractor是一个强大的Node.j…...

知识竞赛大屏计分方案:让比分一目了然
📺 知识竞赛大屏计分方案:让比分一目了然实时准确 视觉直观 操作简便 打造专业竞赛体验🎯 一、方案核心架构大屏计分方案通常由三部分组成:🖥️ 主控端:操作员电脑,运行计分软件📺…...

中兴B863AV3.2-M刷机避坑指南:S905L3A芯片识别、固件选择与Amlogic USB Burning Tool 2.2.0配置详解
中兴B863AV3.2-M刷机全流程精解:从芯片识别到固件烧录的进阶实践 在智能电视盒的玩家圈子里,中兴B863AV3.2-M因其出色的硬件配置和可玩性备受关注。这款搭载Amlogic S905L3A芯片的设备,通过刷机可以解锁更多功能,但过程中暗藏的&q…...

抖音批量下载器终极指南:3步轻松搞定无水印视频下载
抖音批量下载器终极指南:3步轻松搞定无水印视频下载 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...

Taotoken API Key的权限管理与审计日志功能初探
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken API Key的权限管理与审计日志功能初探 对于将大模型能力集成到业务流程中的团队而言,API Key的安全管理与操作…...
)
为什么92%的ElevenLabs山东话项目上线失败?——5大隐性技术红线与3种合规替代方案(附GitHub可运行Demo)
更多请点击: https://intelliparadigm.com 第一章:山东话语音合成落地失败的行业现象与本质归因 山东话语音合成项目在政务热线、乡村广播、文旅导览等场景中频繁试点,但超76%的落地项目在6个月内被迫下线。用户反馈集中于“听不懂”“像普通…...

别再只删node_modules了!npm run serve报错‘There is likely additional logging output above’的完整排查与修复手册
从日志溯源到根治:npm run serve报错的系统性排查指南 当你满怀期待地敲下npm run serve,却迎面撞上那句"There is likely additional logging output above"时,是否感到一阵无力?删除node_modules重装就像重启电脑——…...

【BUUCTF】【WEB】Unicorn shop
考点:Unicode数字字符,python的int()函数打开题目,发现这个页面很像买东西的网站,一共有四个商品,每个商品的价格不一样,但是第4个的商品最贵,而且超出了其他商品特别多,由此合理猜测…...