ROS2学习(五)进程内topic高效通信
对ROS2有一定了解后,我们会发现ROS2中节点和ROS1中节点的概率有很大的区别。在ROS1中节点是最小的进程单元。在ROS2中节点与进程和线程的概念完全区分开了。具体区别可以参考 ROS2学习(四)进程,线程与节点的关系。
在ROS2中同一个进程中可能存在多个节点。两个节点直接交换数据依旧使用典型的topic发布订阅,则听起来像在一个房间的两个人,需要通过邮寄快递来交换物品一样。所以,ROS2中,设计了一种进程内通信的更好的方式。即intra processing.这个选项位于节点的选项中,即Node-Option,
- 使用进程内通信(use_intra_process_comms):类型是bool.如果为true,则在此上下文中发布和订阅的主题消息通过特殊的进程内通信代码路径。可以避免序列化和反序列化,不必要的复制。并在某些情况下实现更低的延迟。该选项默认值为false。
在构造节点时添加“使用进程内通信”选项,即可启用该功能。如下
Node(node_name, rclcpp::NodeOptions().use_intra_process_comms(true));
下面的例子是在一个进程中创建两个节点,都是用intra_process,包括一个发布器的节点,和一个订阅器的节点,二者都使用了节点的进程内通信,并通过unique指针打印了其中地址。每次通信的时候,二者消息指针的地址都是一致的,即消息没有通过UDP传输,而是通过直接读写内存区块传输的。
#include <cstdio>
#include <memory>
#include <string>
#include <utility>
#include "rclcpp/rclcpp.hpp"
#include <chrono>class PubNode : public rclcpp::Node
{public:explicit PubNode(const std::string& node_name):Node(node_name, rclcpp::NodeOptions().use_intra_process_comms(true)){using namespace std::chrono_literals;publisher_ = this->create_publisher<builtin_interfaces::msg::Time>("current_time",10);auto topictimer_callback =[&]()->void {builtin_interfaces::msg::Time::UniquePtr timestamp_ =std::make_unique<builtin_interfaces::msg::Time>(this->get_clock()->now());RCLCPP_INFO_STREAM(this->get_logger(), "pub:Addr is:" << reinterpret_cast<std::uintptr_t>(timestamp_.get()));publisher_->publish(std::move(timestamp_));};timer_ = this->create_wall_timer(std::chrono::milliseconds(500), topictimer_callback);}private:rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<builtin_interfaces::msg::Time>::SharedPtr publisher_;};class SubNode : public rclcpp::Node
{public:explicit SubNode(const std::string & node_name):Node(node_name, rclcpp::NodeOptions().use_intra_process_comms(true)){subscriber_ = this->create_subscription<builtin_interfaces::msg::Time>("current_time",10,std::bind(&SubNode::count_sub_callback, this, std::placeholders::_1));}private:rclcpp::Subscription<builtin_interfaces::msg::Time>::SharedPtr subscriber_;void count_sub_callback(const builtin_interfaces::msg::Time::UniquePtr msg){RCLCPP_INFO_STREAM(this->get_logger(), "sub::Addr is: " <<reinterpret_cast<std::uintptr_t>(msg.get()));}
};void another_executor()
{rclcpp::executors::SingleThreadedExecutor executor_;auto sub_node_ = std::make_shared<SubNode>("topic_sub");executor_.add_node(sub_node_);executor_.spin();
}int main(int argc, char ** argv)
{rclcpp::init(argc, argv);auto pub_node_ = std::make_shared<PubNode>("topic_pub");rclcpp::executors::SingleThreadedExecutor executor_;std::thread another(another_executor);executor_.add_node(pub_node_);executor_.spin();another.join();rclcpp::shutdown();return 0;
}测试进程内通信:
crabe@crabe-virtual-machine:~/Desktop/ROS2_Sample/sample4$ ros2 run sample4 sample4
[INFO] [1691321973.618474226] [topic_pub]: pub:Addr is:94612283905568
[INFO] [1691321973.619805241] [topic_sub]: sub::Addr is: 94612283905568
[INFO] [1691321974.111633655] [topic_pub]: pub:Addr is:94612283906592
[INFO] [1691321974.112431228] [topic_sub]: sub::Addr is: 94612283906592
[INFO] [1691321974.621381952] [topic_pub]: pub:Addr is:94612283906752
[INFO] [1691321974.622338223] [topic_sub]: sub::Addr is: 94612283906752
[INFO] [1691321975.116415866] [topic_pub]: pub:Addr is:94612283906592
[INFO] [1691321975.117153538] [topic_sub]: sub::Addr is: 94612283906592
[INFO] [1691321975.626275913] [topic_pub]: pub:Addr is:94612283906752
[INFO] [1691321975.627212976] [topic_sub]: sub::Addr is: 94612283906752
[INFO] [1691321976.119609316] [topic_pub]: pub:Addr is:94612283906592
[INFO] [1691321976.119766941] [topic_sub]: sub::Addr is: 94612283906592
[INFO] [1691321976.612854241] [topic_pub]: pub:Addr is:94612283906752
[INFO] [1691321976.612988887] [topic_sub]: sub::Addr is: 94612283906752
[INFO] [1691321977.121834835] [topic_pub]: pub:Addr is:94612283906592
[INFO] [1691321977.122012812] [topic_sub]: sub::Addr is: 94612283906592
[INFO] [1691321977.615035889] [topic_pub]: pub:Addr is:94612283906752
[INFO] [1691321977.615166100] [topic_sub]: sub::Addr is: 94612283906752
[INFO] [1691321978.123765480] [topic_pub]: pub:Addr is:94612283906592
[INFO] [1691321978.123915765] [topic_sub]: sub::Addr is: 94612283906592
[INFO] [1691321978.615940232] [topic_pub]: pub:Addr is:94612283906752
[INFO] [1691321978.616072038] [topic_sub]: sub::Addr is: 94612283906752
intra_process与节点执行器无直接关系,仅与是否为同一进程有关。
使用intra_process的节点,其中的topic可以同时支持进程内和进程外的通信,只不过进程外的通信仍然使用UDP作为媒介。如果需要在进程外也使用共享内存的高效方案,则需要考虑在DDS的中间件上下功夫。
相关文章:
进程内topic高效通信)
ROS2学习(五)进程内topic高效通信
对ROS2有一定了解后,我们会发现ROS2中节点和ROS1中节点的概率有很大的区别。在ROS1中节点是最小的进程单元。在ROS2中节点与进程和线程的概念完全区分开了。具体区别可以参考 ROS2学习(四)进程,线程与节点的关系。 在ROS2中同一个进程中可能存在多个节点…...

算法-最大数
给定一组非负整数 nums,重新排列每个数的顺序(每个数不可拆分)使之组成一个最大的整数。 注意:输出结果可能非常大,所以你需要返回一个字符串而不是整数。 输入:nums [10,2] 输出:"210&…...

Spark中使用RDD算子GroupBy做词频统计的方法
测试文件及环境 测试文件在本地D://tmp/spark.txt,Spark采用Local模式运行,Spark版本3.2.0,Scala版本2.12,集成idea开发环境。 hello world java world java java实验代码 import org.apache.spark.rdd.RDD import org.apache.…...
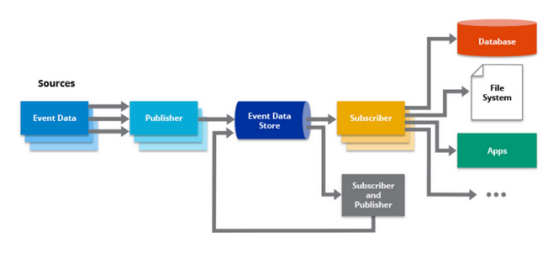
如何使用Kafka构建事件驱动的架构
事件驱动的架构(EDA)是一种软件设计模式,它关注事件的生成、检测和使用,以支持高效和可扩展的系统。在EDA中,事件是组件之间通信的主要手段,允许它们实时交互和响应更改。这种架构促进了松散耦合、可扩展性和响应性,使…...

ES6 解构赋值
解构赋值 解构赋值是一种在编程中常见且方便的语法特性,它可以让你从数组或对象中快速提取数据,并将数据赋值给变量。在许多编程语言中都有类似的特性。 在 JavaScript 中,解构赋值使得从数组或对象中提取数据变得简单。它可以用于数组和对…...
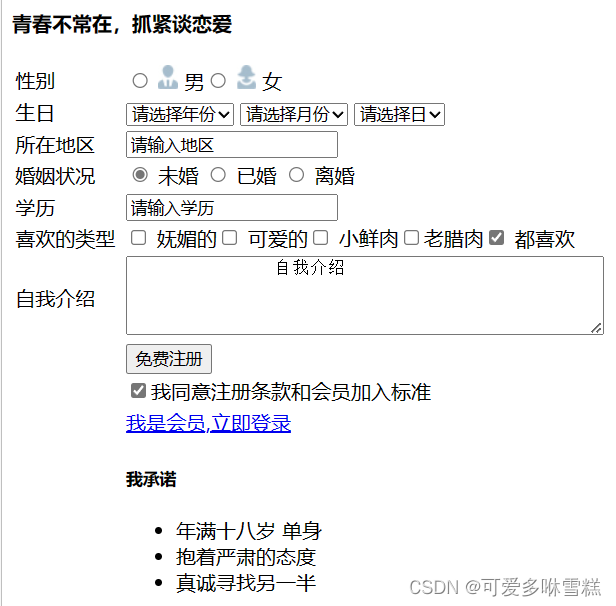
HTML5注册页面
分析 注册界面实际上是一个表格(对齐),一行有两个单元格。 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8" /><meta name"viewport" content"widthdevic…...

python中的JSON模块详解
简介 JSON(JavaScript Object Notation) 是一种轻量级的数据交换格式,它使得人们很容易的进行阅读和编写 同时也方便了机器进行解析和生成。适用于进行数据交互的场景,比如网站前台与后台之间的数据交互 网址 官方文档 json — JSON encoder and dec…...
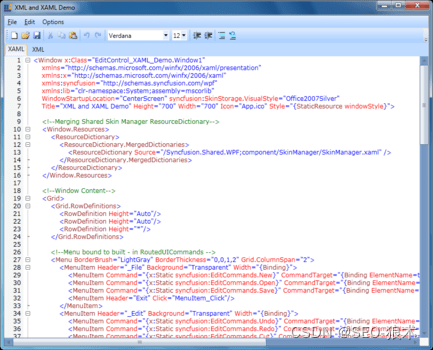
Syncfusion Essential Edit for WPF Crack
Syncfusion Essential Edit for WPF Crack 在任何WPF应用程序中启用语法高亮显示。 Syncfusion Essential Edit for WPF是一款具有所有基本功能的编辑器,如文本编辑、剪切、复制和粘贴。它允许用户从各种文件格式打开文件并将其保存为各种文件格式。Syncfusion Esse…...
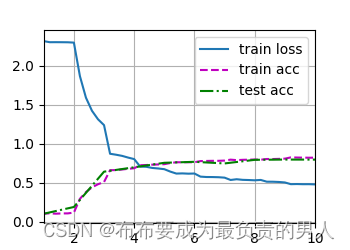
机器学习深度学习——卷积神经网络(LeNet)
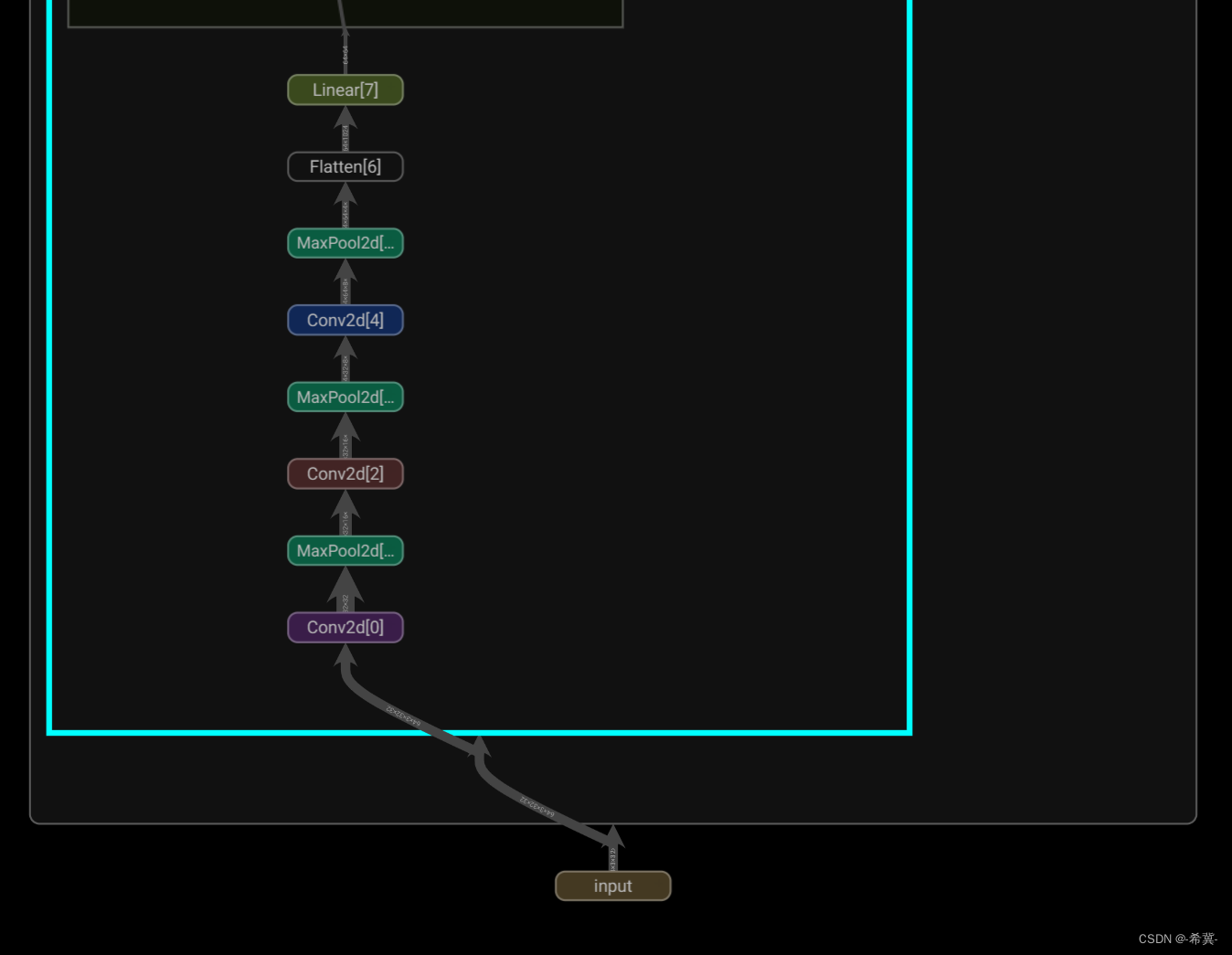
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——池化层 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 卷积神…...
Pytorch Tutorial【Chapter 2. Autograd】
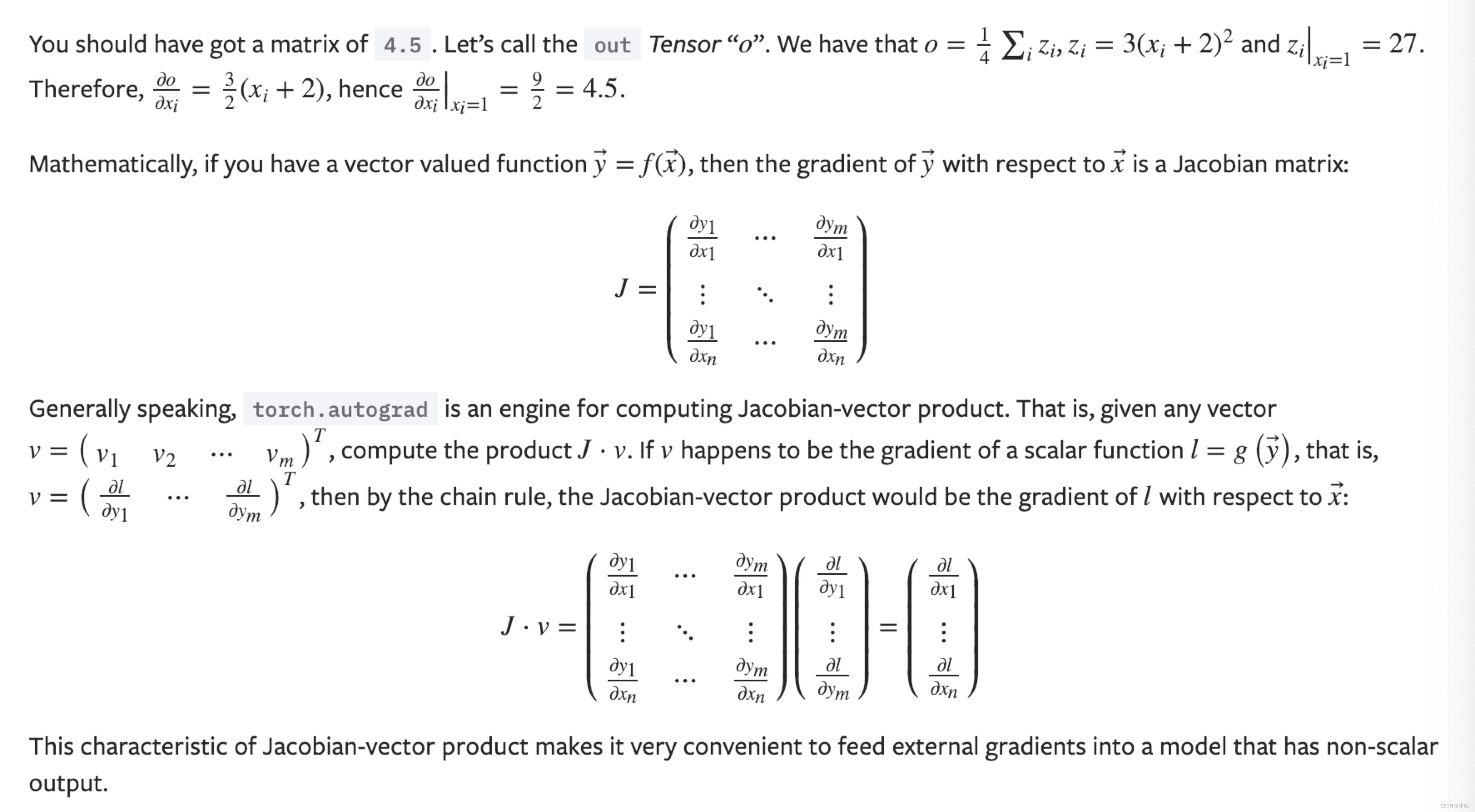
Pytorch Tutorial 文章目录 Pytorch TutorialChapter 2. Autograd1. Review Matrix Calculus1.1 Definition向量对向量求导1.2 Definition标量对向量求导1.3 Definition标量对矩阵求导 2.关于autograd的说明3. grad的计算3.1 Manual手动计算3.2 backward()自动计算 Reference C…...

Python第三方库国内镜像下载地址
Python第三方库国内镜像下载地址 一、清华大学二、中国科技大学三、安装方法 一、清华大学 https://pypi.tuna.tsinghua.edu.cn/simple 二、中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple 三、安装方法 例如 pyhook3 插件的安装方法,执行下面命令安装…...
服务端机器一般部署在哪里)
从浏览器输入url到页面加载(七)服务端机器一般部署在哪里
前言 上一节,我们说到了CDN和路由器的关系,说到了公有地址,说到了通信线路服务,这一节跳过那些看不懂的深层知识,直接开始说web服务器。 1. 服务端机器为什么不部署在公司内部 记得在之前的一段时间里,公…...
Pytorch深度学习-----神经网络之Sequential的详细使用及实战详解
系列文章目录 PyTorch深度学习——Anaconda和PyTorch安装 Pytorch深度学习-----数据模块Dataset类 Pytorch深度学习------TensorBoard的使用 Pytorch深度学习------Torchvision中Transforms的使用(ToTensor,Normalize,Resize ,Co…...
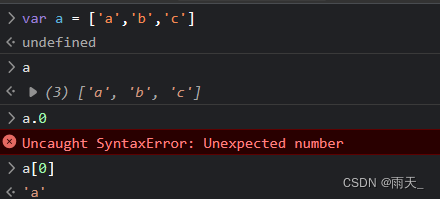
安全基础 --- https详解 + 数组(js)
CIA三属性:完整性(Confidentiality)、保密性(Integrity)、可用性(Availability),也称信息安全三要素。 https 核心技术:用非对称加密传输对称加密的密钥,然后…...

vue加载大量数据优化
在Vue中加载大量数据并形成列表时,可以通过以下方法来优化性能: 分页加载:不要一次性加载所有的数据,而是分批加载数据,每次只加载当前页需要显示的数据量。可以使用第三方库如vue-infinite-loading来实现无限滚动加载…...

WebRTC 之音视频同步
在网络视频会议中, 我们常会遇到音视频不同步的问题, 我们有一个专有名词 lip-sync 唇同步来描述这类问题,当我们看到人的嘴唇动作与听到的声音对不上的时候,不同步的问题就出现了 而在线会议中, 听见清晰的声音是优先…...
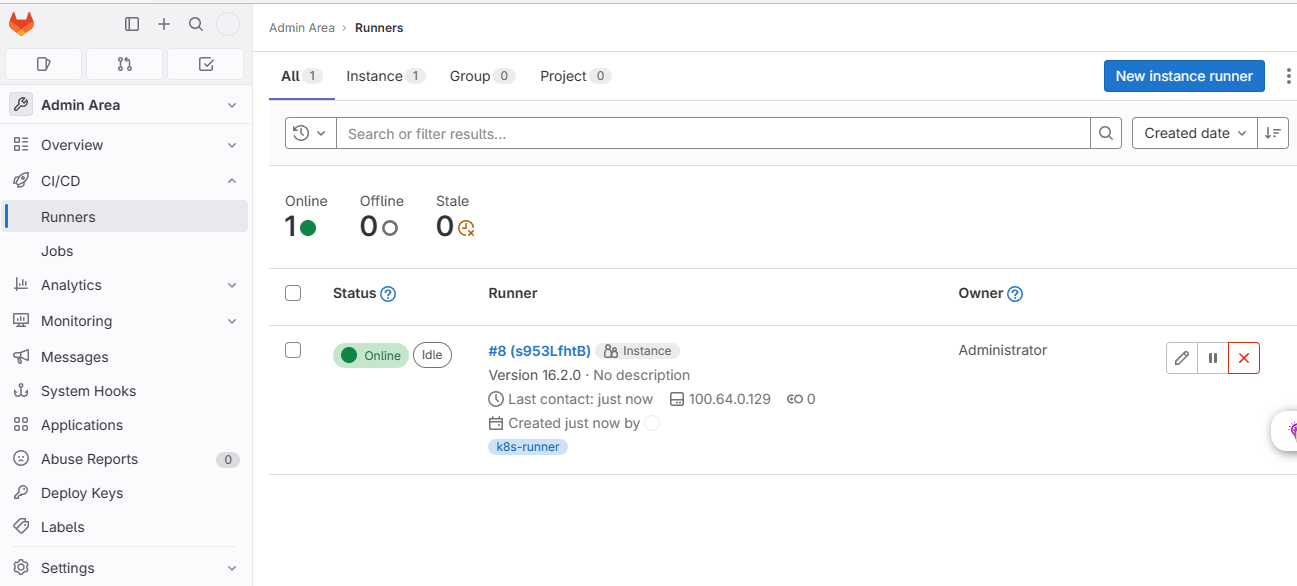
kubernetes基于helm部署gitlab-runner
kubernetes基于helm部署gitlab-runner 这篇博文介绍如何在 Kubernetes 中使用helm部署 GitLab-runner。 先决条件: 已运行的 Kubernetes 集群已运行的 gitlab 实例 项目地址:https://gitlab.com/gitlab-org/charts/gitlab-runner 官方文档ÿ…...

深度学习和OpenCV的对象检测(MobileNet SSD图像识别)
基于深度学习的对象检测时,我们主要分享以下三种主要的对象检测方法: Faster R-CNN(后期会来学习分享)你只看一次(YOLO,最新版本YOLO3,后期我们会分享)单发探测器(SSD,本节介绍,若你的电脑配置比较低,此方法比较适合R-CNN是使用深度学习进行物体检测的训练模型; 然而,…...
Gitlab CI/CD笔记-第一天-GitOps和以前的和jenkins的集成的区别
一、GitOps-CI/CD的流程图与Jenkins的流程图 从上图可以看到: GitOps与基于Jennkins技术栈的CI/CD流程,无法从Jenkins集成其他第三方开源的项目来实现换成了Gitlab来进行集成。 好处在于:CI 一个工具Gitlab就行了,但CD部分依旧是…...

有关OpenBSD, NetBSD, FreeBSD -- 与GPT对话
1 介绍一下 - OpenBSD, NetBSD, FreeBSD 当谈论操作系统时,OpenBSD、NetBSD和FreeBSD都是基于BSD(Berkeley Software Distribution)的操作系统,它们各自是独立开发的,并在BSD许可下发布。这些操作系统有很多共同点,但也有一些差异。以下是对它们的简要介绍: OpenBSD: O…...

轻量级工作流编排引擎:从脚本管理到自动化流程的实践指南
1. 项目概述:从单体脚本到流程编排的进化 如果你和我一样,在数据工程、自动化运维或者机器学习模型训练这些领域摸爬滚打过几年,大概率会遇到一个相似的困境:手头的任务脚本越来越多,它们之间有的有依赖关系࿰…...

高考解析几何“秒杀”技巧:用极点极线快速搞定椭圆定点定值难题
高考解析几何“秒杀”技巧:用极点极线快速搞定椭圆定点定值难题 解析几何作为高考数学的压轴题型,常常让考生望而生畏。面对复杂的计算和抽象的条件,如何在有限时间内快速找到突破口?极点极线理论作为高等几何中的重要工具&#x…...

3大突破性功能:如何用QtScrcpy彻底改变你的Android投屏体验
3大突破性功能:如何用QtScrcpy彻底改变你的Android投屏体验 【免费下载链接】QtScrcpy Android real-time display control software 项目地址: https://gitcode.com/GitHub_Trending/qt/QtScrcpy 你是否曾经为了在电脑上操作手机而烦恼?无论是游…...

ncmdumpGUI:3分钟解锁网易云音乐ncm格式,让你的音乐无处不在
ncmdumpGUI:3分钟解锁网易云音乐ncm格式,让你的音乐无处不在 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 还在为网易云音乐下载的nc…...

ncmdumpGUI:解锁网易云音乐格式限制的智能解密工具
ncmdumpGUI:解锁网易云音乐格式限制的智能解密工具 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 在数字音乐时代,我们经常面临一个尴…...

Python与ChatGPT构建智能办公自动化:从任务分解到智能体系统
1. 项目概述:用Python与ChatGPT联手,让办公自动化“开口说话”如果你每天还在重复着打开Excel、复制粘贴数据、手动写邮件、整理报告这些枯燥的活儿,那这个项目可能就是你的“数字员工”入职通知书。Sven-Bo/automate-office-tasks-using-cha…...

【2026最新】鸿蒙NEXT ArkUI实战:培训班管理系统UI界面开发全攻略
鸿蒙UI开发总是踩坑?ArkUI组件用法记不住?本文用15分钟带你彻底搞懂ArkUI核心组件、布局系统、自定义组件和交互动画,附完整培训班管理系统实战代码和踩坑记录,让你的鸿蒙App界面从此丝滑流畅!一、培训班管理界面设计1…...

轻量级配置管理框架zcf:多环境配置、敏感信息加密与云原生集成实践
1. 项目概述:一个面向开发者的轻量级配置管理框架最近在梳理团队内部工具链时,发现一个挺普遍的问题:不同项目、不同环境(开发、测试、生产)的配置管理总是乱糟糟的。.env文件满天飞,敏感信息一不小心就提交…...

83.人工智能实战:RAG 表格问答怎么做?从前期发现“表格被切碎”到结构化解析、行列索引与答案校验
人工智能实战:RAG 表格问答怎么做?从前期发现“表格被切碎”到结构化解析、行列索引与答案校验 一、问题场景:Word 文档能答,Excel 表格一问就错 很多企业知识库不只有 Word 和 PDF,还有大量表格: 1. 报销标准表 2. 产品价格表 3. 客户等级表 4. SLA 服务等级表 5. 部门…...
如何构建鲁棒的点云局部描述符)
从理论到实践:三维形状上下文(3DSC)如何构建鲁棒的点云局部描述符
1. 为什么我们需要三维形状上下文(3DSC) 想象一下你正在玩一个拼图游戏,但所有碎片都被随机撒上了胡椒粉,有些碎片还被书本盖住了一角。这就是计算机处理含噪声、遮挡的点云数据时的真实处境。在机器人导航、自动驾驶或者工业质检中,我们经常…...